Изобретение относится к судоподъемным и аварийно-спасательным работам на морских и внутренних водоемах.
Известны способы подъема затонувших объектов с помощью подъемно-транспортных устройств с балластными цистернами. Например, известен «Способ подъема затонувших судов из больших глубин» по заявке РФ №93018262/11, МПК B63C 7/08, 1995 г. Корпус поднимаемого судна охватывают жестким каркасом, а к раме каркаса крепят герметичные понтоны, которые спускают при помощи специального контейнера-носителя, заполняемого балластом из сыпучего материала.
Известен также «Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления» по патенту РФ №2388648, МПК B63C 7/02, B63C 7/10, который выбран в качестве прототипа.
Способ включает позиционирование под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом подъемно-транспортного устройства (ПТУ), имеющего положительную плавучесть и замкнутого в плане по наружному периметру. ПТУ опускают на поднимаемый объект, размещая его внутри замкнутого контура с дополнительным центрированием ПТУ относительно объекта за счет создания отрицательной плавучести. Фиксируют на дне и захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней его частью опорных консолей устройства захвата, расположенных в нижней части ПТУ. Выводят объект из соприкосновения с грунтом. Выполняют балластировку и поднимают ПТУ с объектом на поверхность, найтуют к устройству. Устанавливают, закрепляя по наружному периметру, пластырь на нижний обрез устройства с поднимаемым объектом и буксируют их. Подъемно-транспортное устройство, замкнутое по наружному периметру и имеющее устройство захвата поднимаемого объекта, содержит выдвижные опоры на консолях в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости ПТУ с возможностью образования опорной призмы для поднимаемого объекта при выдвинутом положении консолей. На кромках опор выполнены форсунки для подачи воды под давлением для размыва грунта, а также симметрично расположенные относительно центра масс подъемно-транспортного устройства группы понтонов с системой подачи в них и сброса из них воздуха. ПТУ снабжено лебедками, связанными с располагаемыми на дне якорями.
Выполнение работ в соответствии со способом, принятым за прототип, направлено на повышение надежности позиционирования подъемного устройства относительно поднимаемого объекта при наличии течения без обжатия его корпуса, ориентированного в воде при отсутствии заметных крена и дифферента. При их наличии образуемая опорными консолями «равнобокая опорная призма» не будет соответствовать нижней поверхности обвода корпуса объекта, что может способствовать нежелательным местным концентрациям контактных нагрузок с возможными повреждениями обшивки корпуса. Данный недостаток присутствует и у аналога заявляемого изобретения.
Предлагаемое изобретение в части способа направлено на решение технической задачи сохранения целостности корпуса поднимаемого объекта за счет перераспределения возникающих контактных усилий между корпусом и опорными консолями на большое количество их сопрягаемых локальных поверхностей.
Для решения заявленной технической задачи способ выполнения подводных подъемно-транспортных операций включает позиционирование под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом ПТУ, имеющего положительную плавучесть и замкнутого в плане по наружному периметру. ПТУ опускают на поднимаемый объект, размещая его внутри замкнутого контура с дополнительным центрированием ПТУ относительно объекта за счет создания отрицательной плавучести, устройство фиксируют на дне и захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу до контакта с его корпусом опорных консолей устройства захвата, расположенных в нижней части подъемно-транспортного устройства, причем выдвижение осуществляют в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости устройства, при необходимости сопровождая выдвижение консолей устройства захвата местным размывом грунта под поднимаемым объектом, выполняют балластировку, поднимают подъемно-транспортное устройство с поднимаемым объектом на поверхность и буксируют их, обеспечивая нахождение последнего частично или полностью в воде, при этом перед операцией подъема создают трехмерную модель находящегося на дне подлежащего подъему объекта с находящимся над ним и зафиксированным на дне подъемно-транспортным устройством, моделируют выдвижение опорных консолей, для каждой из которых выделяют конструктивные особенности контактирующих поверхностей объекта и опорных элементов консолей, проектируют и изготавливают вкладыши в опорные элементы консолей с обеспечением равномерного распределения контактной нагрузки на локальные участки корпуса объекта, а при подъеме производят сопоставление реального пространственного положения выдвигаемых опорных консолей с опорными элементами и их вкладышами относительно корпуса объекта с трехмерной моделью и обеспечивают корректировку работы приводов перемещения опорных консолей, добиваясь целостности корпуса объекта.
Способ реализует комплекс подъемно-транспортных средств, включающий подъемно-транспортный модуль, расположенные относительно центра масс подъемно-транспортного модуля группы понтонов с системой подачи в них и сброса из них воздуха, а также лебедки, связанные с расположенными на дне якорями, устройство захвата поднимаемого объекта, включающее выдвижные с приводом перемещения опорные элементы на консолях в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости подъемно-транспортного модуля, при этом подъемно-транспортный комплекс содержит центр управления с возможностью отслеживания и отображения в режиме реального времени пространственного положения поднимаемого объекта, подъемно-транспортного модуля и его выдвижных консолей с опорными элементами и их вкладышами, при этом приводы перемещения опорных консолей выполнены с возможностью раздельного дистанционного управления их работой из центра управления и оснащены датчиками положения вкладышей опорных элементов относительно корпуса поднимаемого объекта.
Техническим результатом для заявляемого устройства является сохранение целостности корпуса поднимаемого объекта в процессе его подъема со дна.
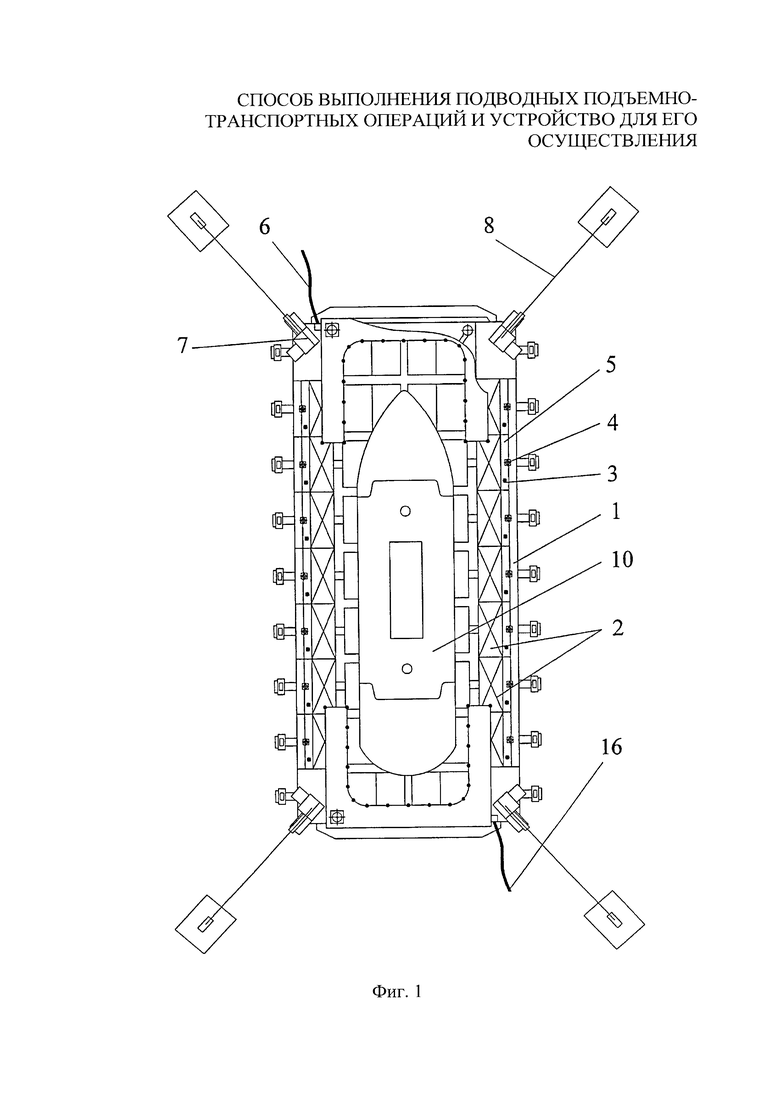
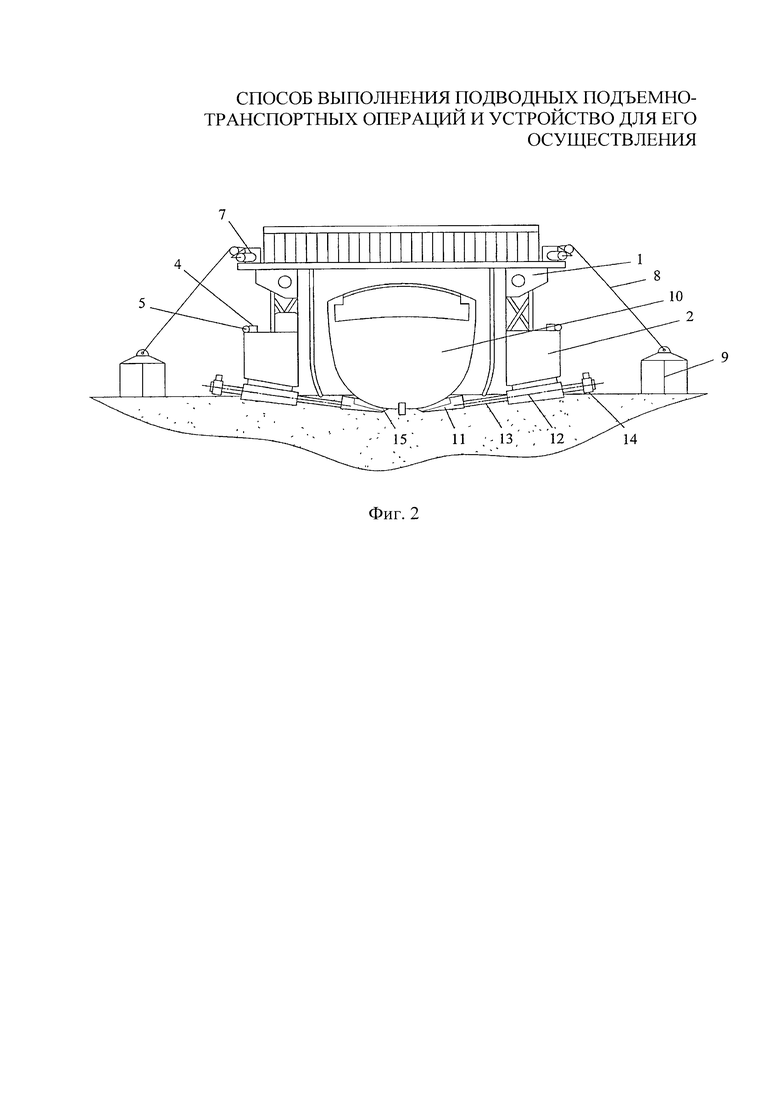
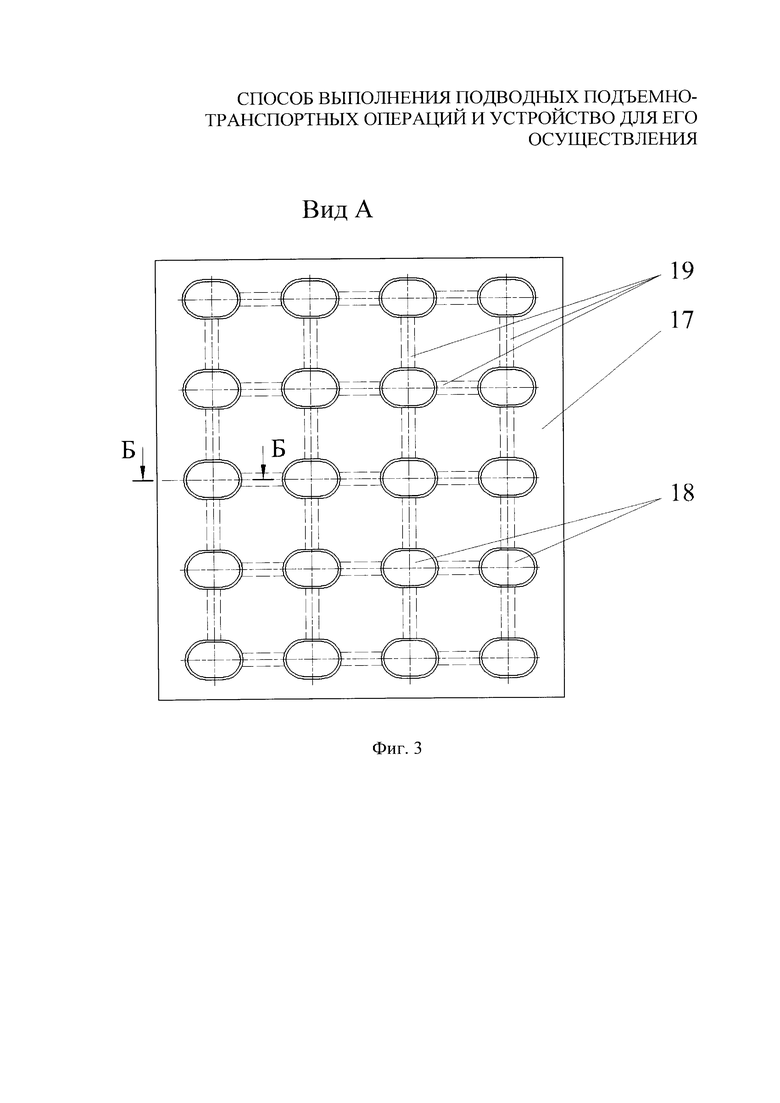
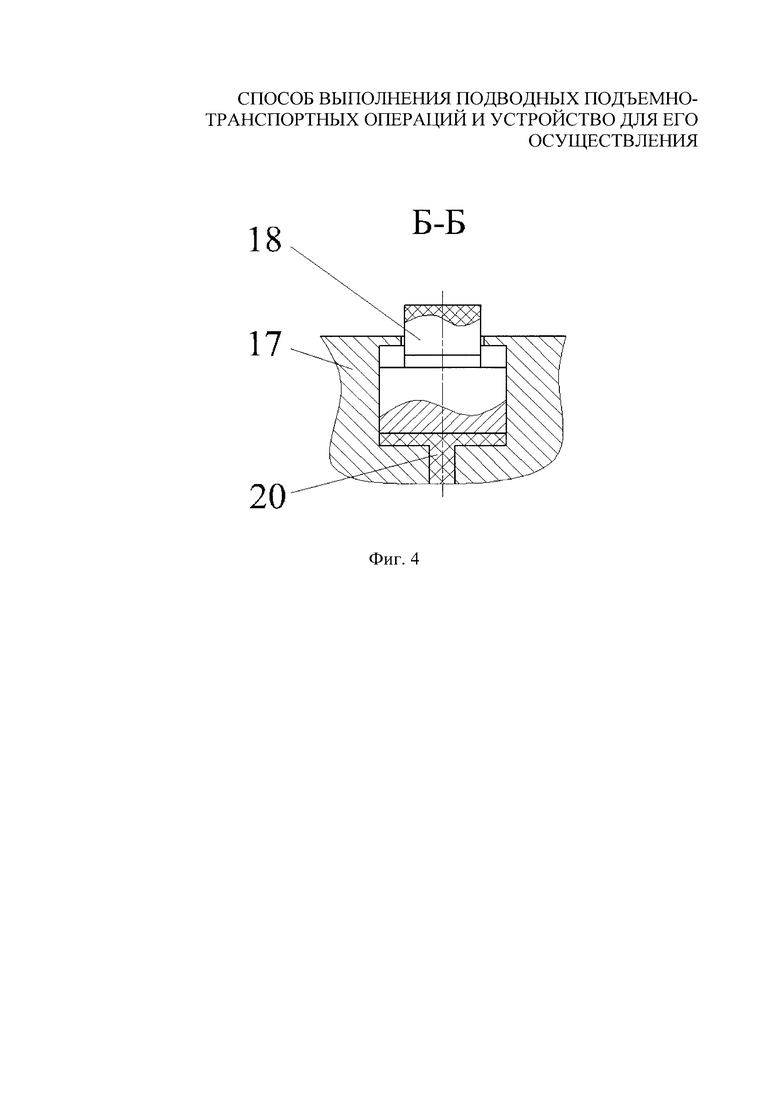
Изобретение поясняется чертежами. На фиг. 1 показан общий вид сверху подъемно-транспортного устройства, на фиг. 2 - поперечный разрез ПТУ, на фиг. 3 - внешний вид вкладышей в опорные элементы консолей, а на фиг. 4 - разрез вкладыша.
Способ выполнения подводных подъемно-транспортных операций реализуется с помощью замкнутого в плане по наружному периметру подъемно-транспортного устройства 1 (фиг. 1), которое может перемещаться в надводном и подводном положениях и содержит две симметрично расположенные относительно центра масс ПТУ понтонов 2 (фиг. 1 и 2), снабженные клапанами 3 вентиляции и клапанами 4 продувки, трубопроводом 5 и магистралью 6 (фиг. 1), связанные с воздухобаллонной станцией обеспечивающего судна (не показано). По углам ПТУ установлены на не показанных пружинных опорах грузовые лебедки 7, тросами 8 или якорными цепями соединенные с якорями 9, разнесенными относительно поднимаемого объекта 10. Устройства захвата объекта 10 выполнены в виде стапельных опор 11 (фиг. 2), закрепленных на выдвигаемых гидроцилиндрами 12 консолях 13. Работа гидроцилиндров 12 обеспечивается насосами 14. На передних (входящих под объект 10) кромках опор 11 размещены вкладыши 15. Дистанционное управление лебедками, насосами и клапанами понтонов осуществляется по кабелю 16 (фиг. 1) из единого центра управления, расположенного на обеспечивающем судне. Вкладыши 15, взаимодействующие с корпусом поднимаемого объекта 10, содержат (фиг. 3 и 4) плиту 17, внутри которой расположены опорные элементы 18, способные свободно перемещаться, и каналы 19, связывающие между собой полости под опорными элементами 18, заполненные гидропластмассой 20 (используемой в качестве среды, передающей давление, - см., например, А.К. Горошкин Приспособления для металлорежущих станков. - М.: Машгиз, 1962, с. 244).
Способ реализуется следующим образом.
ПТУ 1 предварительно позиционируют относительно поднимаемого объекта 10 с помощью лебедок 7 выборкой-подачей тросов 8, связанных с заранее установленными якорями 9. Затем, манипулируя клапанами 3 вентиляции и клапанами 4 продувки секций понтонов 2, обеспечивают положение ПТУ на ровном киле с малой положительной плавучестью. Управляемо работая лебедками 5, ПТУ притапливают, позиционируют под водой в вертикальной и горизонтальной плоскостях требуемым образом над поднимаемым объектом 10 и постепенно опускают на последний, размещая его внутри ПТУ. После посадки ПТУ на грунт устройству придают отрицательную плавучесть, чем окончательно фиксируют его относительно объекта 10. Затем захватывают поднимаемый объект путем одновременного попарного выдвижения консолей 13 с опорами 11 до контакта вкладышей 15 с поднимаемым объектом 10. При этом в режиме реального времени производят сопоставление реального пространственного положения выдвигаемых опорных консолей 13 с опорными элементами 11 и их вкладышами 15 относительно корпуса объекта 10 с трехмерной моделью, построенной заранее, и обеспечивают корректировку работы приводов перемещения опорных консолей, добиваясь целостности корпуса объекта. При контакте каждого из вкладышей 15 с корпусом поднимаемого объекта 10 возникающие контактные усилия распределяются между опорными элементами 18 за счет деформации гидропластмассы 20, находящейся внутри каналов 19, что позволяет существенно снизить риск повреждения корпуса поднимаемого объекта 10. Независимость выдвижения консолей 13 и возможность оперативной корректировки данного процесса позволяет поднимать объекты, лежащие на дне с креном и дифферентом.
После установления надежного захвата объекта 10, планомерно продувают понтоны 2. ПТУ придают положительную плавучесть и осуществляют его отрыв от дна при необходимом контролируемом травлении тросов 8. После окончательной балластировки ПТУ 1 с объектом 10 производят их всплытие, соответствующим образом управляя лебедками 7, а также клапанами 3 вентиляции понтонов 2.
Таким образом, предлагаемый способ осуществления подъемно-транспортных операций и устройство для его осуществления позволяют решить поставленную техническую задачу сохранения целостности корпуса поднимаемого объекта за счет перераспределения возникающих контактных усилий между корпусом и опорными консолями на большое количество их сопрягаемых локальных поверхностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| Захватное устройство для заиленных подводных объектов и способ его использования при осуществлении подъема | 2016 |
|
RU2630040C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099237C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2011 |
|
RU2518683C2 |
| СПОСОБ МОНТАЖА НА ПОДВОДНОМ НОСИТЕЛЕ СМЕННЫХ МОДУЛЕЙ ЗАБОРТНЫХ МАЛОГАБАРИТНЫХ ПУСКОВЫХ УСТРОЙСТВ | 2020 |
|
RU2735109C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ ОПЕРАЦИИ И ПОДВОДНОЕ СУДНО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478517C2 |
| СПОСОБ УСТАНОВКИ И ДЕМОНТАЖА ДОННОГО КОМПЛЕКСА ДЛЯ ВЫПОЛНЕНИЯ РАБОТ НА ШЕЛЬФЕ И КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381135C1 |
| ПЛАВУЧИЙ КРАН | 2009 |
|
RU2382731C1 |
| Судоподъемный комплекс, твердотопливный газогенератор и способ судоподъема | 2018 |
|
RU2700431C1 |
Изобретение относится к судоподъемным и аварийно-спасательным работам на морских и внутренних водоемах. Для выполнения подводных подъемно-транспортных операций включают позиционирование под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом подъемно-транспортное устройство и опускают его на поднимаемый объект. Перед операцией подъема создают трехмерную модель находящегося на дне подлежащего подъему объекта с находящимся над ним и зафиксированным на дне подъемно-транспортным устройством. Моделируют выдвижение опорных консолей. Проектируют и изготавливают вкладыши в опорные элементы консолей с обеспечением равномерного распределения контактной нагрузки на локальные участки корпуса объекта. При подъеме производят сопоставление реального пространственного положения выдвигаемых опорных консолей с опорными элементами и их вкладышами относительно корпуса объекта с трехмерной моделью. Комплекс подъемно-транспортных средств содержит подъемно-транспортный модуль, группы понтонов с системой подачи в них и сброса из них воздуха, лебедки, устройство захвата поднимаемого объекта и центр управления с возможностью отслеживания и отображения в режиме реального времени пространственного положения поднимаемого объекта. Достигается сохранение целостности корпуса поднимаемого объекта. 2 н.п. ф-лы, 4 ил.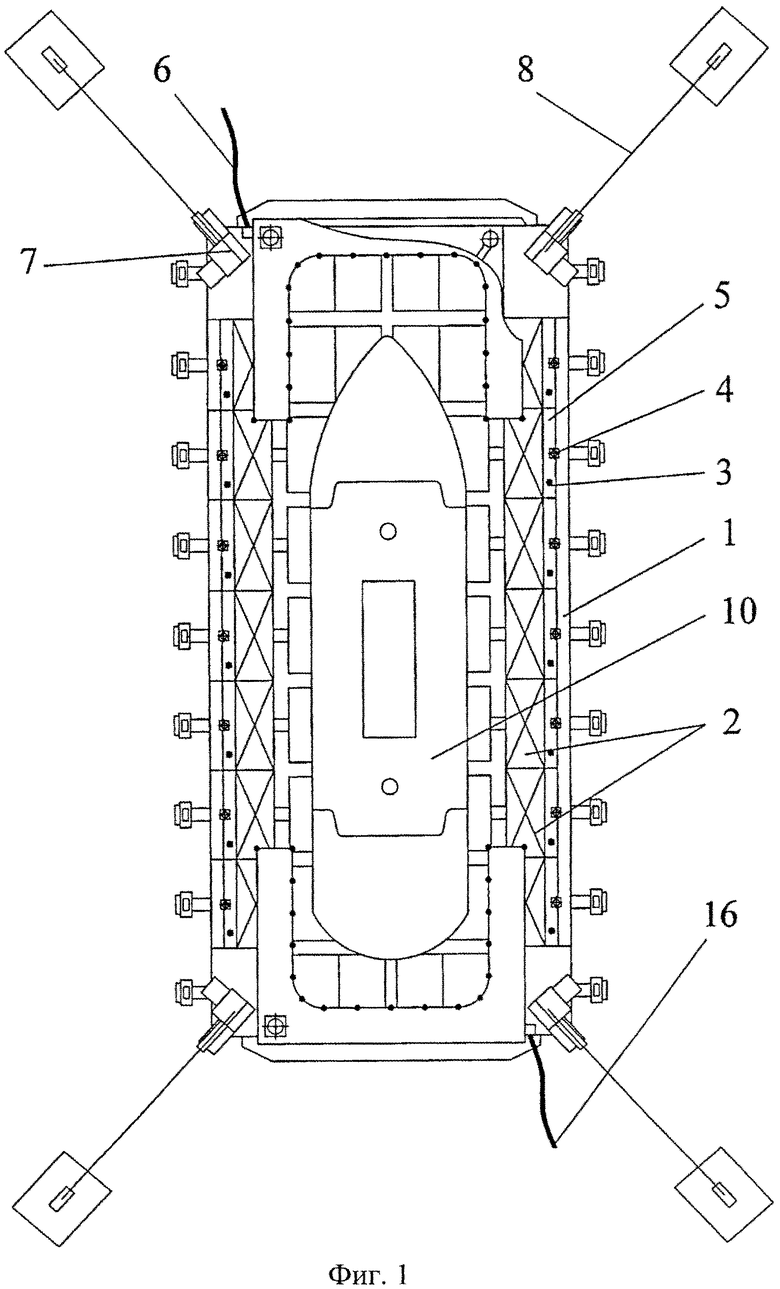
1. Способ выполнения подводных подъемно-транспортных операций, характеризующийся тем, что имеющее положительную плавучесть и замкнутое в плане по наружному периметру подъемно-транспортное устройство позиционируют под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом и далее опускают на последний, размещая его внутри замкнутого контура с дополнительным центрированием подъемного устройства относительно объекта, устройство фиксируют на дне и захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу до контакта с его корпусом опорных консолей устройства захвата, расположенных в нижней части подъемно-транспортного устройства, причем выдвижение осуществляют в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости устройства, при необходимости сопровождая выдвижение консолей устройства захвата местным размывом грунта под поднимаемым объектом, выполняют балластировку, поднимают подъемно-транспортное устройство с поднимаемым объектом на поверхность и буксируют их, обеспечивая нахождение последнего частично или полностью в воде, отличающийся тем, что перед операцией подъема создают трехмерную модель находящегося на дне подлежащего подъему объекта с находящимся над ним и зафиксированным на дне подъемно-транспортным устройством, моделируют выдвижение опорных консолей, для каждой из которых выделяют конструктивные особенности контактирующих поверхностей объекта и опорных элементов консолей, проектируют и изготавливают вкладыши в опорные элементы консолей с обеспечением равномерного распределения контактной нагрузки на локальные участки корпуса объекта, а при подъеме производят сопоставление реального пространственного положения выдвигаемых опорных консолей с опорными элементами и их вкладышами относительно корпуса объекта с трехмерной моделью и обеспечивают корректировку работы приводов перемещения опорных консолей, добиваясь целостности корпуса объекта.
2. Комплекс подъемно-транспортных средств, содержащий подъемно-транспортный модуль, расположенные относительно центра масс подъемно-транспортного модуля группы понтонов с системой подачи в них и сброса из них воздуха, а также лебедки, связанные с расположенными на дне якорями, устройство захвата поднимаемого объекта, включающее выдвижные с приводом перемещения опорные элементы на консолях в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости подъемно-транспортного модуля, отличающийся тем, что подъемно-транспортный комплекс содержит центр управления с возможностью отслеживания и отображения в режиме реального времени пространственного положения поднимаемого объекта, подъемно-транспортного модуля и его выдвижных консолей с опорными элементами и их вкладышами, при этом приводы перемещения опорных консолей выполнены с возможностью раздельного дистанционного управления их работой из центра управления и оснащены датчиками положения вкладышей опорных элементов относительно корпуса поднимаемого объекта.
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| US 3691977 A, 19.09.1972 | |||
| US 3541986 A, 24.11.1970. | |||

