Заявляемое изобретение касается конструкции дефектоскопа-снаряда, применяемого для инспекции состояния газопровода, который включает стабилизатор скорости движения снаряда.
Контроль газопроводов существующими снарядами-дефектоскопами не всегда позволяет получить однозначный ответ о необходимости проведения ремонтных работ. Соответственно растут требования к точностным характеристикам и достоверности информации дефектоскопов, что оборачивается для разработчиков введением дополнительных датчиковых поясов, увеличением информационных каналов, необходимостью стабилизации скорости движения и т.д., реализация которых становится практически невозможной для конструкций, выполненных в традиционном виде.
Известно техническое решение по патенту России №2069288 от 09.12.1993 года, кл. F17D 5/02, в котором описан дефектоскоп-снаряд, состоящий из помещаемых в обследуемый трубопровод и перемещаемых по нему потоком транспортируемого продукта механически связанных и расположенных на основании (основаниях) транспортирующего блока, энергетического блока, дефектоскопического блока, блока регистрации и устройства определения координат дефектов. Дефектоскоп-снаряд снабжен дополнительно введенным байпасным патрубком для пропуска транспортируемого по обследуемому трубопроводу продукта и системой автоматического регулирования скорости перемещения, содержащей датчик скорости, блок управления и один или два регулирующих органа, один из которых выполнен в виде запорно-регулирующего устройства, установленного в байпасном патрубке, а другой - в виде взаимодействующего с трубопроводом тормозного устройства.
Однако практическое построение байпасных дефектоскопов-снарядов с магнитопоисковой системой по описанной в патенте конструкции не представляется возможным по ряду причин.
Во-первых, размещение тормозных устройств, построенных в виде электромагнитов с щеточными полюсными наконечниками, вблизи магнитопоисковой системы недопустимо ввиду их влияния на магнитное поле, создаваемое самой магнитопоисковой системой.
Во-вторых, расчеты, приведенные для тормозных электромагнитов, выполнены без учета заявленных щеточных полюсных наконечников, а поскольку поперечное сечение щеточного магнитопровода в 2-2,5 больше эквивалентного магнитопровода электромагнита, то, следовательно, габариты таких тормозных устройств будут как минимум в 4 раза больше и занимаемая ими площадь будет не 1,07 кв.м, как указано в расчетах, а соответственно 2,14 кв.м. И это то, что касается магнитопровода, общие габариты тормозного устройства будут еще больше и практически сопоставимы с габаритами магнитопоисковой системы, что приведет к значительному увеличению длины дефектоскопа.
В-третьих, в описанной в патенте конструкции энергетический блок расположен под дефектоскопическим блоком (неизвестно, какую функцию он выполняет). Подобное расположение возможно только теоретически, реально энергетический блок занимает, как правило, значительный объем отведенного для использования пространства, и в данном случае такое расположение должно привести к значительному снижению поперечного сечения байпасного патрубка дефектоскопа по патенту, что приведет к увеличению силы тяги со всеми вытекающими последствиями.
В-четвертых, для дефектоскопов-снарядов размером 1400 мм с магнитопоисковой системой диаметр проходного отверстия (диаметр байпасного патрубка) может достигать величины 0,9-1,0 м. При этом для задаваемых аварийных нагрузок в 300000 Н толщина дискового затвора в центре диска должна быть равной 120-130 мм.
В-пятых, задаваясь максимальным размером проходного отверстия, возникает необходимость (у авторов патента это так и сделано) выстраивать все агрегаты (магнитопоисковую систему, энергетический блок, привод дискового затвора, блоки электроники, тормозное устройство) в одну линию. Такое расположение агрегатов возможно только в том случае, если дефектоскоп-снаряд будет эксплуатироваться на прямолинейных участках газопровода, поскольку его длина неизбежно превысит значение двух диаметров инспектируемого трубопровода и не позволит преодолевать повороты радиусом менее трех диаметров трубопровода.
В-шестых, компенсация избыточной силы тяги механическими тормозами неизбежно приведет к их перегреву, быстрому износу и разрушению.
Цель предлагаемого изобретения - обеспечить максимально возможное проходное сечение и снижение лобового сопротивления внутритрубных инспекционных снарядов-дефектоскопов для достижения стабилизации скорости движения дефектоскопа в широком диапазоне скоростей перекачки газа. Поставленная цель достигается путем применения прямоточного регулятора скорости и генераторно-резистивной системы, как исполнительных элементов системы стабилизации скорости, обтекателя магнитной системы и уменьшением диаметра гермоконтейнера, содержащего редуктор трех пар встречно поворотных секторов регулятора скорости, электродвигатель, блок силовой электроники, блок микропроцессорного управления, блок распределенной системы сбора и хранения информации, телеметрическую систему и блок источников питания.
Сущность предлагаемого технического решения состоит в том, что дефектоскоп-снаряд для внутритрубного обследования трубопроводов, перемещаемый потоком транспортируемого газа, выполненный в виде полого цилиндра, катящегося по внутренней поверхности трубопровода, содержащий запорно-регулирующее устройство, дефектоскопический блок, энергетический блок, блок регистрации информации и систему автоматического регулирования скорости его перемещения, содержащую тормозное устройство, блок управления с задатчиком скорости перемещения, регулирующий орган в виде установленного в байпасном патрубке запорно-регулирующего устройства, снабженного подключенным к выходу блока управления приводом, отличается тем, что содержит передний и задний обтекатели для снижения лобового сопротивления дефектоскопа потоку газа и бортовую электронику с системой стабилизации скорости движения дефектоскопа, содержащей два регулирующих органа - устройство перекрытия внутреннего отверстия дефектоскопа-снаряда, выполненного в виде шести попарно встречно поворотных секторов, образующих в закрытом состоянии диск, и тормозной системой, представляющей собой колеса-генераторы с регулируемой активной нагрузкой (генераторно-резистивная система).
Техническая суть изобретения поясняется чертежами.
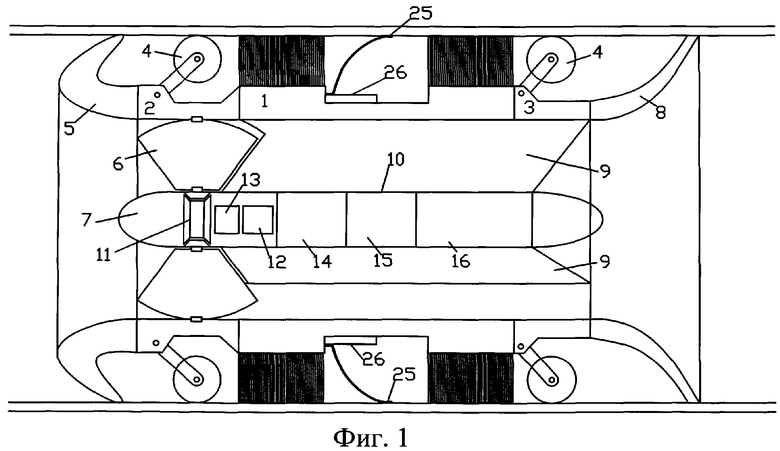
Фиг.1 - продольное сечение снаряда-дефектоскопа с регулятором скорости.
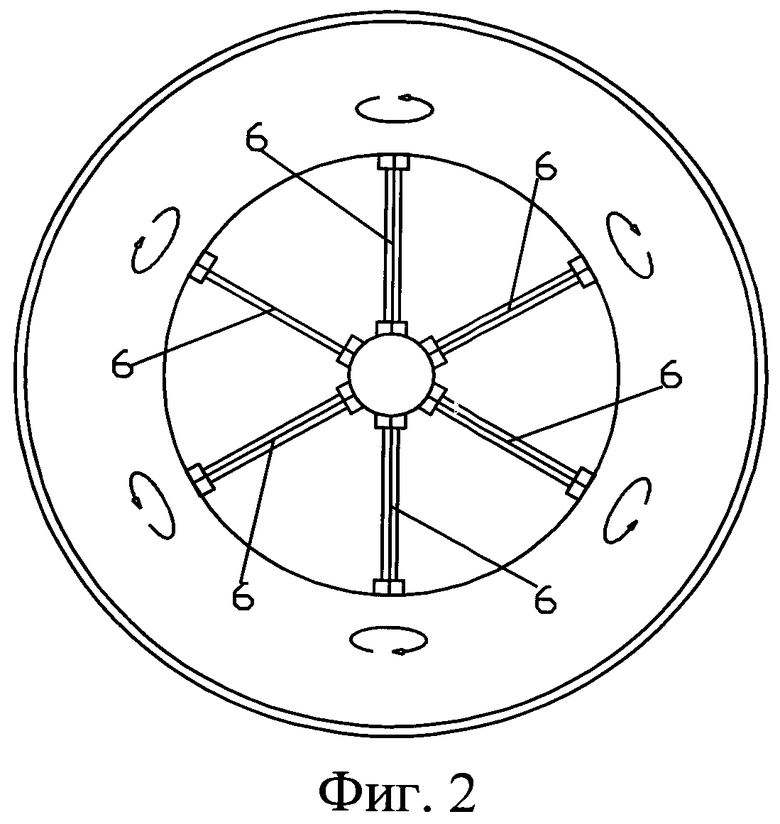
Фиг.2 - конструкция снаряда-дефектоскопа, вид спереди (поворотные сектора в открытом положении).
Фиг.3 - конструкция снаряда-дефектоскопа, вид спереди (поворотные сектора в закрытом положении).
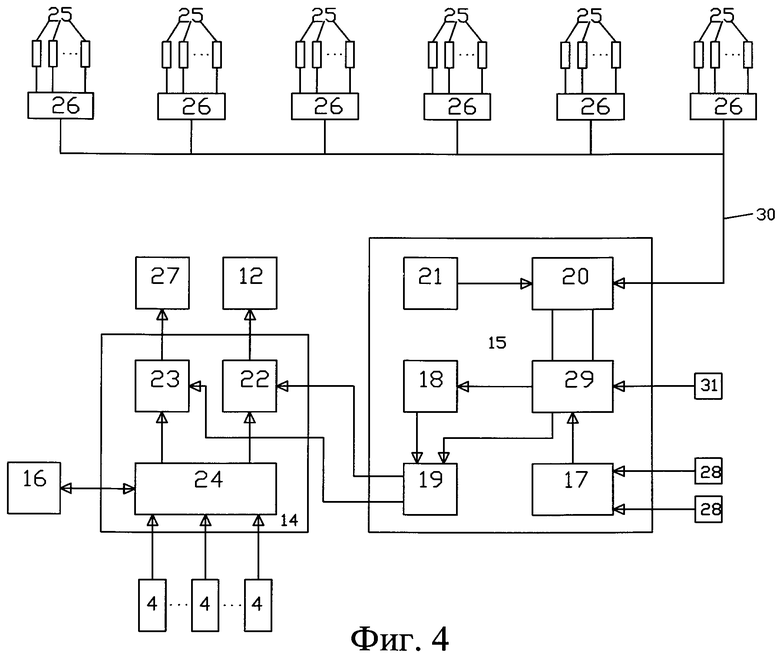
Фиг.4 - функциональная схема снаряда-дефектоскопа со стабилизатором скорости.
В соответствии с ранее изложенным, снаряд-дефектоскоп со стабилизатором скорости содержит магнитопоисковую систему 1 (фиг.1), выполненную в виде полого цилиндра, к которой с двух сторон прикреплены полые металлические цилиндры 2 и 3, выполненные из немагнитной стали, передний 2 из которых является основанием для установки передней группы шести опорных колес-генераторов 4 и переднего эластичного обтекателя-буфера 5, а также является верхней опорой поворотных секторов 6 запорно-регулирующего устройства (регулятора скорости) 7. Полый цилиндр 3, аналогично цилиндру 2, является основанием для установки задней группы шести опорных колес-генераторов 4, заднего эластичного обтекателя 8 и двух одометрических колес 28 (на фиг.1 не показаны). В центре снаряда-дефектоскопа на трех пластинах-радиаторах 9 закреплен контейнер 10, содержащий угловой редуктор 11 шести попарно встречно поворотных секторов 6 запорно-регулирующего устройства (регулятора скорости) 7 и находящиеся в герметичных отсеках контейнера электродвигатель 12 с редуктором 13, блок силовой электроники 14, блок бортовой электроники 15 и блок аккумуляторных батарей 16. Блок бортовой электроники 15 (фиг.4) состоит из блока микропроцессорного управления снарядом-дефектоскопом 29, содержащего узел выбора приоритетного одометра 17, узел вычисления скорости 18 и систему стабилизации скорости дефектоскопа 19, а также содержит процессорный узел 20 распределенной системы сбора и хранения информации и блок телеметрической информации 21. Распределенная система сбора и хранения информации состоит из шести-восьми групп по 40-60 датчиков дефектов 25 (фиг.1) и расположенных в непосредственной близости каждой группы блоков АЦП 26 (фиг.4), соединенных между собой и процессорным узлом 20 высокоскоростным последовательным каналом связи 30.
Блок силовой электроники 14 (фиг.4) состоит из узла управления электродвигателем 22, узла коммутации 23 балластных резисторов 27, расположенных внутри трех опорных пластин-радиаторов 9, и контроллера аккумуляторной батареи 24.
Работает дефектоскоп-снаряд со стабилизатором скорости движения следующим образом.
Перед началом движения дефектоскопа-снаряда положение поворотных секторов запорно-регулирующего устройства (регулятора скорости) 7 закрытое. После ввода его в камеру запуска и поднятия давления до уровня 4-6 кгс/см2 от датчика давления 31 включается блок бортовой электроники и запускаются программы блока микропроцессорного управления дефектоскопом и процессорного узла распределенной системы сбора и хранения информации, основными функциями которых являются считывание информации с датчиков дефектов 25 магнитопоисковой системы и определение скорости движения по поступающим от одометров импульсам. Под действием перепада давления начинается движение дефектоскопа. Система стабилизации скорости может быть запрограммирована на стабилизацию скорости движения дефектоскопа в диапазоне 1,5-2,5 м/с и снабжена двумя регулирующими органами - запорно-регулирующим устройством (регулятором скорости) и генераторно-резистивной системой. При достижении скорости 0,3 м/с начинает открываться запорно-регулирующее устройство, и если при достижении дефектоскопом установленной скорости движения запорно-регулирующее устройство (регулятор скорости) не успело полностью открыться, подключается генераторно-резистивная система, которая способна снижать скорость дефектоскопа на величину не более 3,5 м/с от максимально возможной. В дальнейшем запорно-регулирующее устройство (регулятор скорости) будет стремиться занять такое положение, при котором скорость дефектоскопа составит установленную величину, а генераторно-резистивная система будет отрабатывать мгновенные изменения скоростей либо будет дополнительно гасить скорость при полностью открытым запорно-регулирующим устройстве (регуляторе скорости).
Исходя из известных габаритных размеров основных агрегатов дефектоскопа (магнитопоисковой системы 1 и контейнера 10) можно приближенно рассчитать величину силы тяги, создаваемую потоком газа, и соответствующую ей дополнительную к силе трения тормозящую силу, необходимую для обеспечения движения дефектоскопа с заданной скоростью.
Так величина силы тяги определяется по формуле:
Fтяг=К·ρ·(Vгаз-Yсн)2·S/2,
где К - коэффициент гидравлического сопротивления;
ρ - плотность газа;
Vгаз - скорость перекачки газа;
Vcн - скорость движения дефектоскопа;
S - эффективная площадь поперечного сечения дефектоскопа.
Эффективная площадь поперечного сечения дефектоскопа определяется из соотношения:
S=π·(D2-Dм2+Dк2)/4,
где D - внутренний диаметр трубопровода;
Dм - диаметр проходного отверстия магнитопоисковой системы;
Dк - диаметр контейнера.
Для дефектоскопа размером 1400 мм диаметр проходного отверстия магнитопоисковой системы составляет 0,9 м, диаметр контейнера - 0,25 м. Следовательно, эффективная площадь поперечного сечения S=0,95 м2. При значениях скорости перекачки газа Vгаз=15 м/с, плотности газа ρ=40 кг/м3 и коэффициенте гидравлического сопротивления К=4, сила тяги для заданной скорости дефектоскопа 2 м/с составит
Fтяг=4·132·0,95·40/2=12844 Н
Оценим величину силы трения, возникающую между дефектоскопом и внутренней поверхностью трубопровода. При весе дефектоскопа 5 тонн и коэффициенте трения К=0,2:
Fтp=0,2·50000 Н=10000 Н
Генераторно-резистивная система на опорных колесах-генераторах способна развить мощность в пределах 12-15 кВт, что позволит получить дополнительную силу торможения при максимальной скорости движения снаряда 3 м/с величиной до 4000 Н
Fтop=N/V=12000/3=4000 Н,
где N - мощность генераторно-резистивной системы;
V - максимальная скорость движения снаряда.
Следовательно, изменяя величину нагрузки генераторно-резистивной системы, мы можем добиться баланса тяговых и тормозных сил.
Сила тяги может быть снижена при использовании переднего и заднего обтекателей на величину коэффициента лобового сопротивления и рассчитывается по формуле:
Fтяг=Сх·К·ρ·(Vгаз-Vсн)2·S/2,
где Сх - коэффициент лобового сопротивления;
К - коэффициент гидравлического сопротивления;
ρ - плотность газа;
Vгаз - скорость перекачки газа;
Vсн - скорость движения дефектоскопа;
S - эффективная площадь поперечного сечения дефектоскопа.
Значение коэффициента лобового сопротивления Сх можно определить из графика зависимости Сх от числа Рейнольдса Re.
Re=Vгаз·d/ν,
где V - средняя скорость газа в трубе;
λ - коэффициент теплопроводности газа;
d - диаметр трубы;
ν - коэффициент кинематической вязкости.
Коэффициент кинематической вязкости - это отношение динамической вязкости газа к его плотности.
ν=µ/ρ
µ - динамическая вязкость газа;
ρ - плотность газа.
Значение динамической вязкости газа при давлении 50 кг/см2 можно считать равным 2·10-5 кг/м·с, а плотности газа при этом давлении - 40 кг/м3. Следовательно, величина
ν=2·10-5/40=5·10-7 м2/c.
Задавая значение Vгаз=15 м/с, получим величину Re=15·1,4/5·10-7=42·106. Для значений числа Рейнольдса >105 значение Сх в зависимости от формы обтекателя будут находиться в пределах 0,3-0,4 единиц, а значит, сила тяги для заданной скорости дефектоскопа 2 м/с составит:
Fтяг=0,4·4·132·0,95·40/2=5137,6 Н
Таким образом, использование обтекателей позволит нам снизить силу тяги в 2,5 раза или даст возможность эксплуатировать дефектоскоп при давлении газа, в 2,5 раза большем 50 кг/см2, то есть при 125 кг/см2 (плотность газа пропорциональна давлению), и при этом сохранить прежние характеристики по диапазону стабилизации скорости. Вышеописанный комплекс средств, состоящий из прямоточного регулятора скорости, обтекателей, генераторно-резистивной системы и блока бортовой электроники, позволит стабилизировать скорость движения снаряда-дефектоскопа на заданном уровне в диапазоне от 1,5 до 2,5 м/с (оптимальная скорость движения дефектоскопа для получения достоверной информации магнитным методом) при скоростях перекачки газа до 15 м/с и давлении 12,5 МПа.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР СКОРОСТИ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2013 |
|
RU2533754C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД С УПРАВЛЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2005 |
|
RU2293612C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2270955C2 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2395750C2 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД С УПРАВЛЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2006 |
|
RU2318158C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329432C1 |
| ВНУТРИТРУБНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ ДЛЯ ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 2021 |
|
RU2779721C1 |

Изобретение касается конструкции дефектоскопа-снаряда, применяемого для инспекции состояния газопровода. Технический результат изобретения - обеспечить стабилизацию скорости движения внутритрубных инспекционных снарядов-дефектоскопов. Для этого дефектоскоп-снаряд для внутритрубного обследования трубопроводов, перемещаемый потоком транспортируемого газа, содержит передний и задний обтекатели для снижения лобового сопротивления дефектоскопа потоку газа и бортовую электронику с системой стабилизации скорости движения дефектоскопа, содержащей два регулирующих органа - устройство перекрытия внутреннего отверстия дефектоскопа-снаряда, выполненного в виде шести попарно встречно поворотных секторов, образующих в закрытом состоянии диск, и тормозной системой, представляющей собой колеса-генераторы с регулируемой активной нагрузкой (генераторно-резистивная система). 4 ил.
Дефектоскоп-снаряд для внутритрубного обследования трубопроводов, перемещаемый потоком транспортируемого газа, выполненный в виде полого цилиндра, катящегося по внутренней поверхности трубопровода, содержащий запорно-регулирующее устройство, дефектоскопический блок, энергетический блок, блок регистрации информации и систему автоматического регулирования скорости его перемещения, содержащей тормозное устройство, блок управления с задатчиком скорости перемещения, регулирующий орган в виде установленного в байпасном патрубке запорно-регулирующего устройства, снабженного подключенным к выходу блока управления приводом, отличающийся тем, что содержит передний и задний обтекатели для снижения лобового сопротивления дефектоскопа потоку газа и бортовую электронику с системой стабилизации скорости движения дефектоскопа, содержащей два регулирующих органа - устройство перекрытия внутреннего отверстия дефектоскопа-снаряда, выполненного в виде шести попарно встречно поворотных секторов, образующих в закрытом состоянии диск и тормозной системы, представляющей собой колеса-генераторы с регулируемой активной нагрузкой (генераторно-резистивная система).
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2270955C2 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД С УПРАВЛЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2006 |
|
RU2318158C1 |
| US 4769598 A, 06.09.1988. | |||

