Изобретение относится к внутритрубным снарядам для обследования магистральных трубопроводов с повышенной стабильностью скорости движения.
Известен дефектоскоп для внутритрубного обследования трубопроводов (патент RU №2102738, МПК G01N 27/82, G01N 27/87). Снаряд снабжен байпасным патрубком для перепуска транспортируемого по обследуемому трубопроводу продукта и системой автоматического регулирования скорости перемещений, содержащей датчик скорости перемещения, блок управления с задатчиком скорости и регулирующий орган в виде взаимодействующего со стенкой трубопровода тормозного устройства.
Недостатком этого снаряда является то, что введение электромагнита для тормозного устройства требует больших затрат энергии, а мощность аккумуляторов ограничена. Кроме того, регулировка скорости только за счет сил трения приводит к повышенному износу контактной поверхности тормозного устройства и стенок трубопровода.
Известен скребок для очистки внутренней поверхности трубопровода с изменяемой скоростью (патент USA №5208936 от 11.05.1993, МКИ В08В 9/04), который состоит из цилиндрического корпуса с первым и вторым открытым торцом, кольцевого уплотнения между трубопроводом и корпусом, запорного элемента, расположенного внутри корпуса для блокирования потока жидкости, проходящей через корпус, но проходящей через многочисленные вторые отверстия, причем первые отверстия включают устройства, входящие в контакт со вторыми отверстиями, и которые представляют собой перепускные каналы, определяющие величины потока проходящей жидкости, датчики скорости скребка, средства управления привода и средств закрытия. Первые и вторые отверстия расположены по окружности вокруг первой и второй пластин, а перепускные каналы включают многочисленные трубки, проходящие между соответствующими трубками первых и вторых отверстий и образуют центральную полость. Это устройство не позволяет стабилизировать скорость внутритрубного снаряда при максимальном перепуске газа из-за пластин, блокирующих поток газа.
Известен способ внутритрубной дефектоскопии и дефектоскоп-снаряд для его осуществления (патент РФ №2109206, F17D 5100, В08В 9/04 от 20.04.1998 г., авторов Ефремова Г.А., Усошина В.А. и др.), заключающийся в измерении параметров материала стенок трубы и величин электрических сигналов, зафиксированных дефектоскопическими датчиками при наличии дефектов, в процессе перемещения дефектоскопа-снаряда по трубопроводу в потоке транспортируемого продукта, определяют координаты выявленных дефектов, регистрируют их, по команде из системы управления производят остановку устройства и возвращают его к координатам выявленного отклонения, с заданной скоростью проводят дефектоскопию, обрабатывают и регистрируют результаты измерений, дефектоскопические датчики укреплены между полюсами постоянных магнитов и размещены группами в кассетах, перекрывающих все сечение трубопровода, дефектоскоп-снаряд является двухзвенным механизмом с гидравлическим приводом осевого возвратно-поступательного перемещения одного звена относительно другого, каждое звено имеет опорные органы.
Это техническое устройство принимается за прототип. Недостатком прототипа является сложность конструкции и структурной необеспеченности датчиками и их связями, затрудняющими реализацию системы управления скоростью движения дефектоскопа-снаряда.
Задачей изобретения является повышение точности регулирования скорости и упрощения конструкции снаряда-дефектоскопа.
Поставленная задача достигается за счет того, что во внутритрубный снаряд-дефектоскоп, содержащий цилиндрический корпус, состоящий из двух модулей с возможностью осевого возвратно-поступательного перемещения одного относительного другого, манжеты, колесные опоры, проходные отверстия для продукта вдоль корпуса, реверсивный гидропривод, систему управления, заключенную в герметичный контейнер, одометры, введен дополнительный герметичный контейнер, устройство для изменения перепадов давления между передним и задним модулями, а гидропривод снабжен четырьмя гидродвигателями, снабженными датчиками перемещений. Введен также дополнительный электропривод, при этом подвижный задний модуль снаряда выполнен в виде передней и задней стальных стенок с отверстиями, соединенными между собой периферическим полым цилиндром с утолщениями, в которые вставлены штанги, с передней стороны имеющие конусные клапаны, а с задней - узлы их крепления к задней стенке. На наружной поверхности цилиндрического корпуса заднего модуля укреплен полиуретановый полый цилиндр с передней и задней манжетами для обеспечения возможности осевого возвратно-поступательного перемещения заднего модуля относительно цилиндрической опорной внутренней поверхности в задней части переднего модуля. При этом дополнительный герметичный контейнер соединен соосно с внутренней цилиндрической частью корпуса, внутри него установлены электродвигатель гидронасоса, электропривод распределителя, бачок с жидкостью и система компьютерного управления гидродвигателями, на четырех наружных гранях контейнера установлены четыре гидродвигателя, штоки которых связаны эластичными узлами соединения с задней крышкой заднего модуля снаряда, при этом на штоках установлены датчики перемещения, выходы которых соединены с соответствующими входами системы управления.
Предлагаемое устройство внутритрубного снаряда-дефектоскопа измеряет распределение магнитного поля, наведенного в стенках трубопровода размещенными на снаряде магнитами, с помощью ферромагнитных датчиков или датчиков Холла, внутреннюю поверхность трубы при движении снаряда по трубопроводу в потоке транспортируемого продукта. Электрические сигналы датчиков регистрируют и запоминают. С помощью измерителей координат снаряда, например одометров, определяют координаты дефектов и скорость движения снаряда. При этом поддерживают скорость снаряда в заданных пределах с помощью устройства регулирования скорости, увеличивая или уменьшая сечения проходных отверстий.
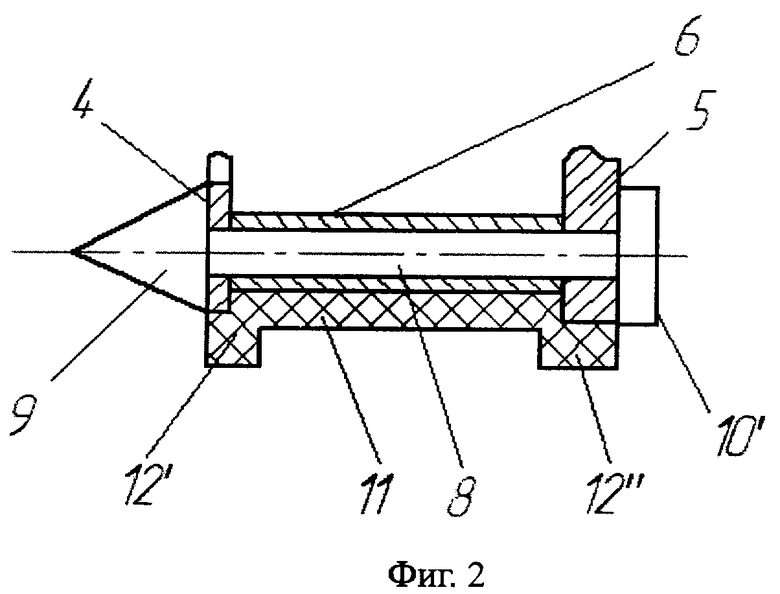
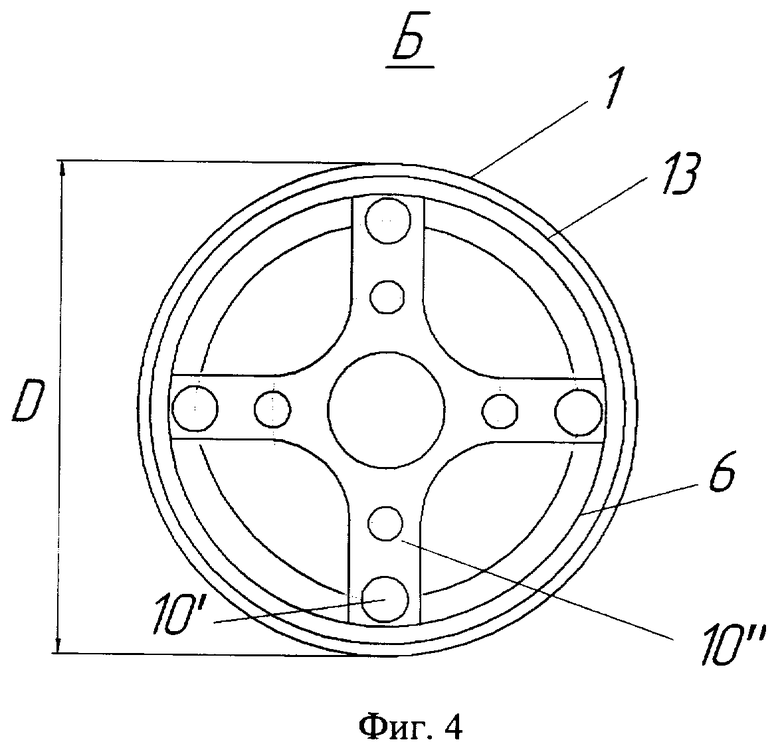
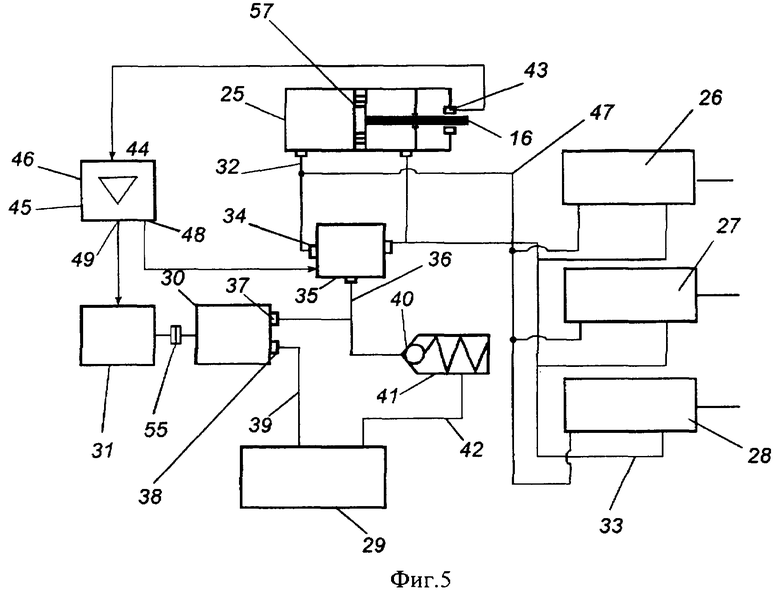
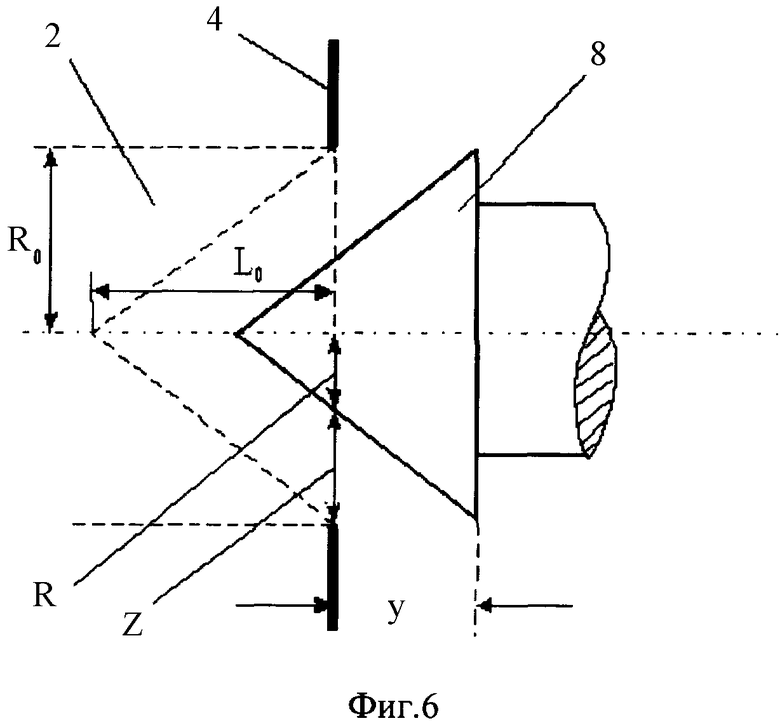
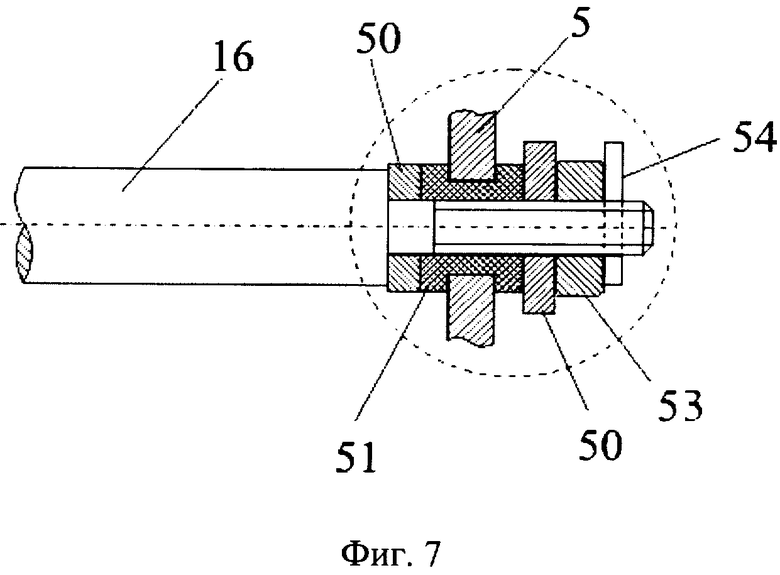
На фиг.1 и фиг.2 изображена конструктивная схема байпасного внутритрубного снаряда - дефектоскопа (снаряда), на фиг.3 изображено сечение снаряда по А-А, на фиг.4 изображен вид снаряда по стрелке Б. На фиг.5 представлена схема соединения гидропривода с системой управления. На фиг.6 изображена схема к расчету перемещений клапана. На фиг.7 представлен узел крепления штока к задней стенке.
Снаряд включает в свой состав цилиндрический корпус 1 с цилиндрическими проходами 2, составляющими передний модуль снаряда. Задняя подвижная относительно корпуса 1 часть снаряда 3, составляющая задний подвижный модуль, состоит из стального каркаса, содержащего переднюю 4 и заднюю 5 стенки с отверстиями для пропуска газов. Передняя 4 и задняя 5 стенки соединены обечайкой 6 с четырьмя продольными цилиндрическими отверстиями с утолщениями 7, внутрь которых вставлены штанги 8, с передней стороны заканчивающиеся конусообразными клапанами 9, а с задней - устройствами крепления 10' к задней стенке 5 в виде, например, гаек со стопорами (не показаны). Для обеспечения эластичного подвижного соединения заднего подвижного модуля 3 с корпусом 1 установлен на наружной поверхности обечайки 6 опорный, например, полиуретановый цилиндр 11 с передней 12' и задней манжетами 12”. В качестве направляющей для подвижного заднего модуля 3 снаряда выступает внутренняя цилиндрическая поверхность 13, выполненная в корпусе 1 снаряда, ограниченная спереди буртиком. Он является ограничителем для передней стенки 2 модуля 3 снаряда. Опорный дополнительный контейнер 14 соединен, например, болтами (не показаны) с внутренним торцом задней стороны цилиндрического корпуса 1. На четырех его гранях установлены гидравлические приводы 15, штоки 16, которые своими концами соединены узлом крепления (фиг.5) с задней крышкой 5 таким образом, чтобы обеспечить возможность передачи усилия от гидроприводов как в положительном, так и в отрицательном направлениях по продольной оси снаряда. Подводящие и отводящие трубопроводы к гидродвигателям и устройство их переключения, гидронасос и электродвигатель привода гидронасоса, дополнительный электропривод распределения установлены во внутренней герметичной части 17 дополнительного контейнера 14. Во внутренней части 17 дополнительного контейнера 14 установлены также блоки электроники и питания электропривода.
Внутренняя полость цилиндрического корпуса 1 герметизирована с помощью крышки 18, образуя герметичный (основной) контейнер. В нем размещены приборы ориентации и навигации 19, блок электроники 20 для сбора и хранения информации, блок питания 21 в виде, например, литиевых батарей. На периферической части цилиндрического корпуса 1 размещаются либо датчики для обнаружения коррозии и других дефектов трубопровода 22, либо датчики для определения профиля трубопровода 22 и т.д. Снаряд снабжен также манжетами 23 с колесами, колесными одометрами 24.
Гидропривод состоит из гидродвигателей 25, 26, 27, 28, бачка с жидкостью 29, гидронасоса 30, приводимого в действие от электродвигателя 31. Гидродвигатели 25…28 соединены трубопроводами 32 и 33 с левым и правым выходами распределителя жидкости 34, который соединен с дополнительным электроприводом 35 распределителя. Трубопровод 36 соединен с электроприводом 35.
В свою очередь, распределитель жидкости 34 через электропривод 35 распределителя соединен трубопроводом с нагнетательным выходом 37 гидронасоса 30, его всасывающий вход 38 соединен трубопроводом 39 с бачком 29. К трубопроводу 36 подсоединен вход 40 предохранительного клапана 41, а его выход с помощью трубопровода 42 соединен с бачком 29.
Все гидравлические соединения и элементы герметизированы, имеются герметичные муфты вводных - выводных трубопроводов из контейнера 14. На штоке 16 гидродвигателя 25 установлен датчик перемещения 43, его электрический выход соединен с соответствующим входом 44 компьютерной системы управления 45. С другим ее входом 46 соединен выход одометра 24. Трубопровод 47 соединяет трубопровод 32 с нагнетательными полостями гидронасосов 26, 27, 28.
Выход 48 системы управления 45 соединен со входом электропривода 35 распределителя, а выход 49 системы управления 45 соединен со входом электродвигателя 31.
Узел крепления фиг.5 состоит из шайб 50, резиновой или полиуретановой втулки 51, гайки 53 и шплинта 54. Благодаря такому креплению обеспечивается эластичное соединение штоков 16 гидроприводов с задней крышкой 5, обеспечивающее равномерность распределения сил по четырем гидронасосам. Следует отметить, что крышка 5 также обладает упругостью, что способствует согласованию соединений всех штоков четырех гидроприводов с задней крышкой 5, вызванных неточностью их изготовления. При изготовлении снаряда жесткость мест крепления задней крышки можно еще снизить путем разрезания перемычек между креплениями узлов 10' на задней крышке 5.
Работает снаряд следующим образом. При его запасовке в трубопровод система управления 44 при отсутствии движения снаряда (V=0) устанавливает с помощью штоков 16 гидронасосов 25, 26, 27, 28 подвижный задний модуль 3 в крайнее левое положение, которое изображено на фиг.1 При подаче давления газа Р (фиг.1) снаряд начинает двигаться, поскольку клапаны 8 полностью перекрывают четыре проходных отверстия 2. При большой скорости V движения снаряда (например, больше 4 м/с) по сигналу от одометра система управления 44 с выхода 49 включает электродвигатель 31, и он через муфту 55 приводит в действие гидронасос 30. Кроме того, по сигналам системы управления с выхода 48 электропривод 35 устанавливает распределитель 34 потока жидкости так, что поступившая через трубопровод 32 (или через трубопровод 33) жидкость переместит шток 16 в такое положение, при котором задний подвижный модуль 3 сместится в такое фиксированное положение, при котором образуются зазоры между клапанами 8 и проходными отверстиями 2. При этом разность давлений между передней и задней стенками уменьшится, и скорость снаряда снизится. Для обеспечения устойчивости и качества регулирования скорости V введен в гидродвигатель 44 датчик перемещения 43 штока 16. Сзади снаряд защищен кожухом с отверстиями 56, с передней - кожухом 57 с кольцом 58.
Процесс перекрытия или открытия площади проходных цилиндрических сечений осуществляется путем перемещения заднего модуля снаряда по отношению к переднему, на основе установленной зависимости скорости движения снаряда, определяемой по одометру, от величины площади открытия проходных отверстий

где перемещение заднего модуля относительно переднего модуля вызывает открытие площади проходов в соответствии с формулой

где R0 - радиус каждого проходного отверстия;
L0 - длина запорного конуса;
n - число проходных отверстий;
y - перемещение заднего модуля относительно переднего.
Закон управления гидропривода задают на основе соотношения

где Кос - коэффициент передачи цепи обратной связи;
Pн - давление на выходе гидронасоса;
Sn - площадь поршня одного гидродвигателя;
F - сила, развиваемая четырьмя гидродвигателями.
Движущая сила снаряда Fдв определяется приближенной формулой

где ΔF - сила движения, определяемая разностью ΔР статических давлений газа на переднюю и заднюю стороны снаряда, меняющаяся в зависимости от степени перекрывания цилиндрических проходов 2;
ρ - плотность газа;
W - скорость газа относительно снаряда,
S1 и S2 - площади сечений задней подвижной части 3 снаряда и его неподвижной (относительно корпуса 1) части;
ξ1, ξ2 - коэффициенты сопротивления этих частей снаряда;
mc - масса снаряда;
g - ускорение силы тяжести;
θ - угол тангажа снаряда;
Fmp - сила трения.
Имеем для определения скорости W

Т.к. скорость газа относительно снаряда определяется по формуле

где υ - скорость газа относительно трубы, скорость движения снаряда относительно трубы F равна

Нетрудно видеть, что увеличение открытия проходов с помощью клапанов 9 снижает скорость движения снаряда. Расчеты показали, что если проходные отверстия в корпусе снаряда полностью открыты, то сила лобового сопротивления снаряда меньше силы трения снаряда о внутреннюю стенку трубопровода. В этом случае снаряд не движется. При приближении задней части к корпусу снаряда проходные отверстия в корпусе частично перекрываются, сила лобового сопротивления увеличивается, и снаряд начинает движение вдоль трубопровода.
Коэффициенты гидравлического сопротивления ξ1 и ξ2, входящие в формулы (1)-(5), выражаются через площади открытого сечения прохода S3, всего сечения прохода S4 и сечения трубы So по формулам [Справочник по гидравлическим сопротивлениям. // И.Е.Идельчик: М.: Машиностроение, 1975. - C.125]


где R - радиус сечения трубопровода;
r1 и r2 - радиусы нижней и верхней границы цилиндрических проходов;
Cx1=0,15, Сх2=0,2, τ=0,2 - коэффициенты, учитывающие форму головной части снаряда.
Второе слагаемое в формуле (7) учитывает взаимное влияние заднего подвижного модуля 3 и корпуса 1 снаряда друг на друга.
Если через ΔР2 обозначить разность давлений газа между передним и задним торцами корпуса снаряда, то ΔР2 определяется по формуле

где ξ - осредненный коэффициент сопротивления.
Как показывают проведенные расчеты, величина ΔР мало изменяется с изменением площади открытой части сечения проходов и скорости движения снаряда в трубопроводе при неизменных рабочем давлении и рабочей скорости движения газа в трубопроводе. На фиг.6 изображены положения клапана 8, закрывающего цилиндрический проход 2 круглого сечения R0 (пунктирная линия), а также его положение, смещенное вправо на величину y. На фиг.6 радиус R соответствует площади перекрытия клапаном проходного сечения, следовательно, открытая площадь для n проходов равна

Увеличение S приводит к уменьшению Fдв (формулы 1 и 2) и, следовательно, скорости V снаряда относительно трубопровода.
Если приблизительно аппроксимировать снятую экспериментально зависимость снаряда

где 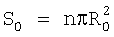 ;
;
k - коэффициент пропорциональности,
то тем самым удастся аналитически описать закон управления давлением Рн, подводимым к гидродвигателям от гидронасоса

где Кос - коэффициент передачи датчика 43;
КF - коэффициент передачи гидропривода.
Расчеты показывают, что сила при открытых проходах 2, действующая со стороны движущегося газа на хвостовую часть снаряда, составляет 10-15% от суммарной газодинамической силы, действующей на весь снаряд. При закрытии проходов распределение сил пропорционально площадям S0 и S.
Применение предлагаемого изобретения позволит существенно упростить способ регулирования скорости и конструкцию внутритрубного снаряда-дефектоскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2369783C1 |
| РЕГУЛЯТОР СКОРОСТИ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2013 |
|
RU2533754C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| Магистральный проходной магнитный дефектоскоп | 2023 |
|
RU2820508C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329432C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРОХОЖДЕНИЯ ДЕФЕКТОСКОПОМ РАВНОПРОХОДНЫХ ТРОЙНИКОВ БЕЗ ОСТАНОВОК | 2006 |
|
RU2324170C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2002 |
|
RU2207512C1 |

Изобретение относится к внутритрубным снарядам для обследования магистральных трубопроводов с повышенной стабильностью скорости движения. Технический результат изобретения - повышение точности регулирования скорости при упрощении конструкции внутритрубного снаряда-дефектоскопа. Внутритрубный снаряд-дефектоскоп с регулируемой скоростью движения, содержащий цилиндрический корпус, состоящий из двух модулей с возможностью осевого возвратно-поступательного перемещения одного относительного другого, манжеты, колесные опоры, проходные отверстия для продукта вдоль корпуса, реверсивный гидропривод, систему управления, заключенную в герметичный контейнер, одометры, дополнительно содержит дополнительный герметичный контейнер, устройство для изменения перепадов давления между передним и задним модулями, при этом гидропривод снабжен четырьмя гидродвигателями, снабженными датчиками перемещений, введен дополнительный электропривод, при этом подвижный задний модуль снаряда выполнен в виде передней и задней стальных стенок с отверстиями, соединенными между собой периферическим полым цилиндром с утолщениями, в которые вставлены штанги, с передней стороны имеющие конусные клапаны, а с задней - узлы их крепления к задней стенке, на наружной поверхности цилиндрического корпуса заднего модуля укреплен полиуретановый полый цилиндр с передней и задней манжетами для обеспечения возможности осевого возвратно-поступательного перемещения заднего модуля относительно цилиндрической опорной внутренней поверхности в задней части переднего модуля, при этом дополнительный герметичный контейнер соединен соосно с внутренней цилиндрической частью корпуса, внутри него установлены электродвигатель гидронасоса, электропривод распределителя, бачок с жидкостью и система компьютерного управления гидродвигателями, на четырех наружных гранях контейнера установлены четыре гидродвигателя, штоки которых связаны эластичными узлами соединения с задней крышкой заднего модуля снаряда, при этом на штоках установлены датчики перемещения, выходы которых соединены с соответствующими входами системы управления. 7 ил.
Внутритрубный снаряд-дефектоскоп с регулируемой скоростью движения, содержащий цилиндрический корпус, состоящий из двух модулей с возможностью осевого возвратно-поступательного перемещения одного относительного другого, манжеты, колесные опоры, проходные отверстия для продукта вдоль корпуса, реверсивный гидропривод, систему управления, заключенную в герметичный контейнер, одометры, отличающийся тем, что в состав снаряда-дефектоскопа дополнительно введены дополнительный герметичный контейнер, устройство для изменения перепадов давления между передним и задним модулями, при этом гидропривод снабжен четырьмя гидродвигателями, снабженными датчиками перемещений, введен дополнительный электропривод, при этом подвижный задний модуль снаряда выполнен в виде передней и задней стальных стенок с отверстиями, соединенными между собой периферическим полым цилиндром с утолщениями, в которые вставлены штанги, с передней стороны имеющие конусные клапаны, а с задней - узлы их крепления к задней стенке, на наружной поверхности цилиндрического корпуса заднего модуля укреплен полиуретановый полый цилиндр с передней и задней манжетами для обеспечения возможности осевого возвратно-поступательного перемещения заднего модуля относительно цилиндрической опорной внутренней поверхности в задней части переднего модуля, при этом дополнительный герметичный контейнер соединен соосно с внутренней цилиндрической частью корпуса, внутри него установлены электродвигатель гидронасоса, электропривод распределителя, бачок с жидкостью и система компьютерного управления гидродвигателями, на четырех наружных гранях контейнера установлены четыре гидродвигателя, штоки которых связаны эластичными узлами соединения с задней крышкой заднего модуля снаряда, при этом на штоках установлены датчики перемещения, выходы которых соединены с соответствующими входами системы управления.
| СПОСОБ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ И ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2109206C1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНЫХ ОБСЛЕДОВАНИЙ ТРУБОПРОВОДОВ | 1994 |
|
RU2102738C1 |
| US 5208936 А, 11.05.1993 | |||
| ОРГАНОМИНЕРАЛЬНОЕ УДОБРЕНИЕ | 2017 |
|
RU2667159C1 |

