Изобретение относится к устройствам неразрушающего контроля дефектов стенок магистральных трубопроводов в виде коррозии, вмятин, раковин и других повреждений, причем внутритрубный снаряд со средствами дефектоскопии может по информации одометров и других датчиков менять скорость своего движения. Например, это необходимо при движении его со скоростью больше 7…8 м/с, при которой ухудшается чувствительность средств магнитной дефектоскопии, а также для более тщательного обследования поврежденных участков с целью диагностики их состояния.
Известен дефектоскоп для внутритрубного обследования трубопроводов (патент RU №2102738, МПК G01N 27/82, G01N 27/87). Снаряд снабжен байпасным патрубком для перепуска транспортируемого по обследуемому трубопроводу продукта и системой автоматического регулирования скорости перемещений, содержащей датчик скорости перемещения, блок управления с задатчиком скорости и регулирующий орган в виде взаимодействующего со стенкой трубопровода тормозного устройства.
Недостатком этого снаряда является регулировка скорости только за счет сил трения, которые приводят к повышенному износу стенок трубопровода и контактной поверхности тормозного устройства. Кроме того, введение электромагнита для тормозного устройства требует больших затрат энергии, а мощность аккумуляторов ограничена.
Известен скребок для очистки внутренней поверхности трубопровода с изменяемой скоростью (патент USA №5208936 от 11.05.1993, МКИ В08В 9/04), который состоит из цилиндрического корпуса с первым и вторым открытым торцом, кольцевого уплотнения между трубопроводом и корпусом, запорного элемента, расположенного внутри корпуса для блокирования потока жидкости, проходящий через корпус, через многочисленные вторые отверстия, причем первые отверстия включают устройства, входящие в контакт со вторыми отверстиями и которые представляют собой перепускные каналы, определяющие величину потока проходящей жидкости, датчики скорости скребка, средства управления, привода и средств закрытия. Первые и вторые отверстия расположены по окружности вокруг первой и второй пластин, а перепускные каналы включают многочисленные трубки, проходящие между соответствующими трубками первых и вторых отверстий, и образуют центральную полость. Это устройство не позволяет стабилизировать скорость внутритрубного снаряда при максимальном перепуске газа из-за пластин, блокирующих поток газа.пп
Известен аппарат обследования трубопровода с переменной скоростью (патент США №6370721 от 16.04.2002 МКИ В08В 9/55), содержащий цилиндрический корпус, кольцевую изоляцию, подогнанную по окружности к корпусу, множество проходов, тянущихся вдоль корпуса. Проходы расположены периферически на определенном расстоянии друг от друга. Используется элемент в виде диффузора для выборочного зацепления с проходами за счет относительного движения их по оси, что изменяет размер отверстия проходов. Имеются поворотные элементы для изменения с помощью электропривода размеров сечений проходов. Имеется компьютерная система управления, электропривод, манжеты, одометр, щетки-магнитопроводы. Эта конструкция имеет при полностью открытой позиции максимум 50% площади поперечного сечения.
Эта конструкция аппарата плохо управляемая и не имеет возможности автоматически поддерживать заданную скорость снаряда, достаточно сложна и при этом необходимо большое усилие от электропривода.
Известен внутритрубный инспекционный снаряд с управляемой скоростью движения (Патент РФ №2293612 от 11.04.2005) - прототип. Снаряд содержит цилиндрический корпус с передней и задней опорами в виде кольцевых манжет между корпусом и трубопроводом, одометрические датчики скорости перемещения снаряда, гермоконтейнер с электрооборудованием и блоком управления приводом байпасной системы, включающей устройство перепуска газа через проходные отверстия, дефектоскопические датчики, содержащие датчики магнитного поля трубопровода и постоянные магниты, секции щеток-магнитопроводов, размещенные на цилиндрическом корпусе снаряда.
Недостатком изобретения-прототипа является недостаточная точность управления скоростью движения снаряда из-за низкой эффективности устройств управления и из-за недостаточности источников информации о параметрах движения и сил, вызывающих неравномерность скорости движения снаряда, и сложность конструкции.
Задачей изобретения является повышение точности поддержания скорости движения снаряда и упрощение его конструкции без снижения эффективности перепуска газа.
Поставленная задача достигается за счет того, что во внутритрубном снаряде-дефектоскопе с изменяемой скоростью движения, содержащем цилиндрический корпус, манжеты, подогнанные к корпусу, сквозные проходные отверстия внутри корпуса, одометры, компьютерную систему управления, контейнер с блоками питания и электронного оборудования, привод перепуска газа, устройство для изменения площади сечения проходного отверстия, магниты, закрепленные на цилиндрическом корпусе, датчики магнитного поля трубопровода, щетки-магнитопроводы, объединенные в секции, в который введены датчики осевых перемещений в виде устройств по измерению деформаций внутренних торцов манжет, по измерению деформаций секций щеток-магнитопроводов и по измерению вариаций диаметра трубопровода, расположенных по окружности в количестве не менее четырех штук и не менее двух рядов для устройств по измерению деформаций внутренних торцов манжет, а также по измерению деформаций секций щеток-магнитопроводов, дополнительный герметичный контейнер в задней части снаряда, два приемника газового давления в виде трубок Пито в передней и задней частях снаряда, закрепленных на переднем и заднем контейнерах, с приемными отверстиями, соответственно направленными по ходу и против хода движения снаряда, измеритель компонента кажущегося ускорения, направленного по продольной оси снаряда, компьютерная модель динамики снаряда в виде дополнительного вычислителя, установленного в переднем контейнере, причем устройство для изменения сечения проходных отверстий выполнено в виде четного числа неподвижных, а также подвижных поворотных лопаток, закрепленных на соосном поворотном валу, связанном через редуктор с электродвигателем реверсивного электропривода, причем со входами дополнительного вычислителя соединены выходы соответствующих устройств по измерению деформаций манжет, по измерению перемещений секций щеток-магнитопроводов, измерению вариаций диаметра трубопровода, выходы переднего и заднего приемников газового давления, выходы одометров, выход измерителя компоненты кажущегося ускорения, направленного по продольной оси снаряда, выход датчика угла поворота вала электродвигателя, выходы дополнительного вычислителя соединены с входами компьютерной системы управления электропривода поворотных лопаток снаряда.
Датчики осевых перемещений содержат прижимной рычаг, имеющий возможность поворотов в опорах вокруг неподвижной оси, закрепленной на основании, установленном на корпусе снаряда, на этой оси укреплен датчик Холла, а на рычаге укреплены постоянные магниты возбуждения, между рычагом и основанием установлена пружина, обеспечивающая прижим головной части рычага в виде накладки к поверхности для измерения ее перемещения.
Датчик осевых перемещений в виде устройства по измерению деформаций секций щеток-магнитопроводов дополнительно содержит каркас, охватывающий по периметру секцию щеток-магнитопроводов, сепаратор с отверстиями-ячейками для пропуска через них всех щеток-магнитопроводов, который закреплен по сторонам каркаса в перпендикулярном направлении к направлению деформации щеток на упругих пластинах, жестко закрепленных на корпусе снаряда на уровне 2/3 высоты щеток от их основания.
В датчиках осевых перемещений в виде устройства по измерению деформаций внутренних торцов манжет головная часть прижимного рычага в виде накладки прижата к торцу манжеты, деформацию поверхности которого измеряют, а в датчиках в виде устройства по измерению вариаций диаметра трубопровода головная часть прижимного рычага в виде накладки прижата к внутренней поверхности трубопровода, изменение диаметра которого измеряют, а ось поворота рычага перпендикулярна продольной оси снаряда.
На фиг.1 и фиг.2 изображена конструктивная схема снаряда, на фиг.3 представлены узлы крепления устройств по измерению деформаций манжет и секций щеток-магнитопроводов; на фиг.4, 5 изображена конструкция крепления датчика Холла и рычага; на фиг.6 и фиг.7 изображена конструктивная схема каркаса отдельной секции щеток-магнитопроводов; на фиг.8 изображена структурная схема системы управления электропривода; на фиг.9 изображен график статической характеристики снаряда, имеющего опоры в виде манжет.
В состав внутритрубного снаряда-дефектоскопа с изменяемой скоростью движения (снаряда) входят стальной корпус 1 со сквозными проходными отверстиями 2. Корпус имеет четыре манжеты, включающие пару передних 3 и 4 и пару задних 5 и 6 манжет, обеспечивающие опору и центрирование корпуса 1 в трубопроводе 7. С передней 8 и задней 9 радиальными осевыми перегородками, закрепленными в периферической части корпуса 1, соединены передний 10 и задний 11 герметичные контейнеры. В переднем герметичном контейнеры 10 размещены приборы ориентации и навигации, блоки питания электроники, включающие устройство записи и хранения информации датчиков Холла 12 и одометра 13. В заднем герметичном контейнере 11 размещен электропривод перепускного устройства, второй блок питания, второй блок электроники, включающий компьютерную систему управления электропривода с встроенным датчиком угла поворота вала электропривода, электромагнитную бесконтактною муфту, редуктор привода подвижных лопаток 14, имеющих возможность в опорах, укрепленных на контейнере 11, поворачиваться относительно неподвижных лопаток 15 вокруг продольной оси. Подвод электрических проводов для обеспечения передачи сигналов от датчиков Холла 12, а также от других датчиков к контейнерам 10 и 11 для обеспечения электрического питания одометра 13 и съема с него выходных сигналов осуществляется в стенках контейнера 10 и лопатках 15 соответственно через посредство гермоконтейнеров (провода и герморазьемы не показаны). На наружной поверхности цилиндра корпуса 1 закреплены несколько пар полюсов постоянных магнитов, расположение которых обозначено их радиальными продолжениями в виде передней 16 и задней 17 секций щеток-магнитопроводов. На наружной цилиндрической части корпуса 1 расположены датчики осевых перемещений: согласно позиции 18 - на второй по ходу движения снаряда манжете 4, затем согласно позиции 19 - на третьей по ходу движения снаряда манжете 5, затем согласно позиции 20 - на каркасе перемещения 17 секции щеток-магнитопроводов. На фиг.1 представлены по два датчика перемещения из рядов 18, 19, 20. По каждой из окружностей этих датчиков могут быть размещены ряды измерителей из четырех, восьми или больше четного числа датчиков - тем больше размеры снаряда, чем больше число датчиков. Датчик перемещения 18 (или 19, 20) представляет собой закрытый крышкой 21 датчик Холла 22 (см. фиг.5), размещенный на оси 23, вокруг которой установлены постоянные магниты возбуждения 24, имеющие возможность поворота вместе с рычагом 25 вокруг оси 23 (см. фиг.4 и фиг.5). На наружной поверхности рычага 25 имеется опорная накладка 26, соприкасающаяся с поверхностью, перемещение которой определяется указанным датчиком. Прижим рычага 25 по отношению к корпусу 1 поверхностью П, либо поверхностью R (фиг.4) и осуществляется пружиной 27 и основанием датчика 18 (или 19, 20). Выводы датчика Холла 22 через провода и герморазъемы соединены со вторым блоком электроники компьютерной системы управления электроприводом, расположенным в заднем контейнере 11. Из фиг.1 следует, что датчик перемещения 18 (как и другие в этом кольцевом ряду) имеет прижим рычага 25 через накладку 26 к задней радиальной плоскости манжеты 4. В датчике перемещения 19 рычаг 25 прижат к задней, радиальной плоскости 28 манжеты 5 пружиной 27. В свою очередь, датчик перемещения 20 имеет прижим рычага 25 к задней радиальной стойке-пластине 29, соединенной шарнирно с каркасом 30. Каркас 30 содержит две радиальные перпендикулярные оси OX1 стойки-пластины 29 и две боковые планки 31, параллельные оси OX1. Планки 31 жестко соединены с сепаратором 32, а с стойками-пластинами 29 - шарнирно, причем оси четырех шарниров перпендикулярны планкам 31. Щетки-магнитопроводы 33 охвачены ячейками за счет отверстий в металлическом сепараторе 32. В каждое отверстие проходит по одной щетке-магнитопроводу 33. Зазор между щеткой-магнитопроводом 33 и сепаратором 32 мал (0,1…0,15 мм) для обеспечения возможности передачи силы изгиба щеток-магнитопроводов 33 на стойки-пластйны 29. Стойки-пластины 29 изготовлены из пружинистой стали. Зоны их деформаций соответствуют зонам линейности характеристик. 34 - башмак стойки-пластины 29 с отверстием для их крепления болтами 35 к основанию 36 групп 16 и 17 щеток-магнитопроводов.
Из фиг.6 и фиг.7 следует, что соединение каркаса 30 со стойками-пластинами 29 производится с помощью двух цилиндрических осей 37 с буртиками. Для этого на стойках-пластинах 29 имеются выступы 38 с отверстиями (фиг.6), соответствующие отверстиям на концах планок 31 (фиг.1, фиг.6) каркаса 30, в которые и вставлены оси 37 (фиг.7). К переднему контейнеру 10 соосно через штангу и фланец прикреплен приемник давления газа в виде трубки Пито 39, в передней части которого установлен приемник полного давления 39', а на расстоянии примерно пяти диаметров трубки - приемник статического давления 40. 41 - фланец контейнера 11.
На заднем контейнере 11 закреплен через посредство штанги и фланца второй приемник давления газа в виде трубки Пито 42, аналогичный трубке Пито 39. В ней позицией 43 обозначен приемник полного давления, позицией 44 - приемник статического давления. Может быть применено ограждение трубок Пито от повреждений (не показано). Трубопроводы и устройство вычислителя давлений не показаны - они описаны, например, в [1] и [3] соответственно.
Работает снаряд следующим образом. В исходном состоянии снаряд неподвижен. При включении питания на электроэлементы снаряда его система управления приводит в действие электропривод, который поворачивает подвижные лопатки 15 так, что они закрывают проходы 2. При подаче в трубопровод 7 газа разность давлений слева и справа от лопаток 14, 15 приводит снаряд в движение с некоторой скоростью V. В случае превышения снарядом значения скорости V*=4 м/с система управления по сигналам одометров 13, трубок Пито 39 и 42, по сигналам датчиков перемещений 18, 19 и 20 будет, поворачивая подвижные лопатки 15, открывать проходы 2 в такой степени, чтобы поддерживать скорость снаряда на уровне не больше заданной скорости V*. При этом будет надежно осуществляться с помощью магнитных, профилеметрических или других датчиков дефектоскопия стенок трубопровода 7.
На фиг.8 представлена структурная схема системы управления электропривода. Позицией 45 обозначено устройство суммирования, выполненное, например, на операционных усилителях. Далее 46 - передаточная функция регулятора скорости, которая является сочетанием позиционного и интегрирующего элементов (изодромное звено); 47 - второй сумматор напряжений; 48 - усилитель мощности (на транзисторах); 49 - третий сумматор напряжения (обмотка статора электродвигателя); 50 - передаточная функция электрической части обмотки; 51 - усилитель по току; 52 - электромагнитная часть двигателя, в которой ток преобразуется в момент двигателя
Mg; 53 - передаточная функция по ЭДС двигателя; 54 - сумматор моментов (вал ЭДС); 55 - передаточная функция ротора электродвигателя вместе с механической передачей - редуктором; 56 - интегрирующее звено; 57 - коэффициент передачи обратной связи по угловой скорости (тахогенератор на валу электродвигателя); 58 - коэффициент передачи по заданному углу α*; 59 - коэффициент передачи по скорости движения; 60 - передаточное отношение редуктора; 61,62 - датчики в виде устройств для измерения вариаций диаметра трубопровода 7. Они аналогичны датчикам 18 и 19 и отличаются размерами и прижаты рычагами к трубопроводу 7. На фиг.8 изображен датчик угла 63 поворота ротора 55 и усилитель 64 с коэффициентом передачи Ку.
Дифференциальное уравнение движения снаряда вдоль продольной оси имеет вид:
где m - масса снаряда; х1 - перемещение снаряда вдоль продольной оси относительно трубопровода; Fдв - движущая сила, обусловленная действием разности давления газа сзади и спереди снаряда; Fд - сила демпфирования, состоящая из двух составляющих: первой - обусловленной газовыми потоками через отверстия и щели между элементами снаряда и трубой; второй - обусловленной токами Фуко, наводимыми магнитами при наличии скорости движения снаряда в стенках трубопровода;  - сила трения от манжет; N - число манжет;
- сила трения от манжет; N - число манжет;  - сила трения от щеток-магнитопроводов; ν - число секций щеток-магнитопроводов; mgθ - проекция силы веса на продольную ось снаряда при наличии угла тангажа θ; Fвозм - сила возмущения от газовых потоков, вибраций, вызванных неровностями стенок трубы, наличием жидкости в трубе и другими причинами механической, магнитной и электромагнитной природы.
- сила трения от щеток-магнитопроводов; ν - число секций щеток-магнитопроводов; mgθ - проекция силы веса на продольную ось снаряда при наличии угла тангажа θ; Fвозм - сила возмущения от газовых потоков, вибраций, вызванных неровностями стенок трубы, наличием жидкости в трубе и другими причинами механической, магнитной и электромагнитной природы.
Силу демпфирования приблизительно можно описать формулой:

где n - коэффициент демпфирования от сил электромагнитной и механической природы;  - скорость снаряда относительно трубы, определяемая по сигналу одометра. Движущая сила определяется разностью статических давлений спереди и сзади снаряда ΔР, а также скоростным напором, т.е. разностью полных давлений. Из соотношений (1) и (2) следует, что отдельно силы трения колес, а также и силы демпфирования на борту снаряда непосредственному измерению не поддаются. В заявке предложен косвенный путь определения с помощью датчиков перемещений 18 (или 19, 20) силы трения от манжет и силы трения от щеток, что ниже и показывается. Если колеса установлены на манжете, деформации которой определяются с помощью датчиков перемещений, то с их помощью можно косвенно определять совокупную силу трения от манжеты и колес.
- скорость снаряда относительно трубы, определяемая по сигналу одометра. Движущая сила определяется разностью статических давлений спереди и сзади снаряда ΔР, а также скоростным напором, т.е. разностью полных давлений. Из соотношений (1) и (2) следует, что отдельно силы трения колес, а также и силы демпфирования на борту снаряда непосредственному измерению не поддаются. В заявке предложен косвенный путь определения с помощью датчиков перемещений 18 (или 19, 20) силы трения от манжет и силы трения от щеток, что ниже и показывается. Если колеса установлены на манжете, деформации которой определяются с помощью датчиков перемещений, то с их помощью можно косвенно определять совокупную силу трения от манжеты и колес.
Конструкция датчиков перемещения 18, 19 и 20 одинакова.
Крепление датчиков перемещения 18 и 19 к корпусу 1 снаряда выполнено так, что они упираются рычагами в плоские части манжет 4 и 6 и прижимаются к ним пружинами 27. Датчики перемещения 20 прижаты рычагами 25 к пластинам 29. Движение снаряда происходит в одном направлении по вектору скорости V, поэтому деформации манжет от исходного недеформированного состояния относительно корпуса 1 могут происходить только в одном направлении, увеличиваясь или уменьшаясь по величине в зависимости от силы трения и от диаметра трубопровода. В радиальных направлениях манжеты деформируются по разному: от максимальных значений в нижних частях снаряда до минимальных в верхних. Поэтому сигналы четырех, восьми или другого количества датчиков перемещений 18 (или 19, или 20) будут различными. Сила трения датчиков 18 (или 19, или 20) определяется путем суммирования сигналов о деформациях всех датчиков, пропорциональных соответствующим компонентам перемещений, и деления на количество датчиков.
Обоснуем возможность измерения сил трения одной секции щеток-магнитопроводов  (k=1,…,n). Имея в виду в соответствии с фиг.3, фиг.6, фиг.7, что пластина 29 имеет жесткую заделку за счет крепления болтами 35 к основанию 36, что жесткость двух пластин много больше общей жесткости секции щеток-магнитопроводов, для определения деформации одной пластины
(k=1,…,n). Имея в виду в соответствии с фиг.3, фиг.6, фиг.7, что пластина 29 имеет жесткую заделку за счет крепления болтами 35 к основанию 36, что жесткость двух пластин много больше общей жесткости секции щеток-магнитопроводов, для определения деформации одной пластины  по линии осей шарниров на расстоянии lщ (фиг.6) от цилиндрических осей 37 имеем формулу [4]:
по линии осей шарниров на расстоянии lщ (фиг.6) от цилиндрических осей 37 имеем формулу [4]:
Для двух пластин деформация будет вдвое меньше:

Если от действия притяжения магнитным полем трубы жесткость щеток-магнитопроводов велика, то деформация пластин будет меньше и будет определяться формулой:

где nµ - число щеток-магнитопроводов в одной секции; Е, Ем - модули упругости пластины 29 и отдельной щетки-магнитопровода соответственно; Jc, Jм - моменты инерции сечения пластины и отдельной щетки-магнитопровода; lм - полная длина отдельной щетки-магнитопровода; k - индекс (номер) секции щеток-магнитопроводов.
Зависимость линейная. Нетрудно заключить, что рычаг должен прижиматься к пластине 29 по высоте не более величины lщ крепления шарниров. Из формулы (3) следует, что характеристика перемещения двух пластин является линейной, а их общее перемещение будет равно xn щ, т.е. вдвое меньше, чем определяемое формулой (3). Для полного количества щеток сила трения находится путем суммирования сил отдельных щеток.
Для деформаций манжет отсутствуют конечные формулы для перемещений от силы  вследствие того, что они являются элементами с распределенными параметрами. Поэтому для каждого из датчиков перемещений манжеты 4 (датчики перемещений 18) и манжеты 5 (датчики перемещений 19) на стадии регулировок и отладки снаряда статические характеристики определяются экспериментально:
вследствие того, что они являются элементами с распределенными параметрами. Поэтому для каждого из датчиков перемещений манжеты 4 (датчики перемещений 18) и манжеты 5 (датчики перемещений 19) на стадии регулировок и отладки снаряда статические характеристики определяются экспериментально:

где  - перемещение в N манжете, соответствующее µ-му датчику, расположенному по окружности с позицией 18, либо 19;
- перемещение в N манжете, соответствующее µ-му датчику, расположенному по окружности с позицией 18, либо 19;  - сила, соответствующая µ-му датчику перемещения (18-ой позиции соответствуют датчики с индексами 4 (µ=1, 2, 3, 4, …), 19-ой позиции соответствуют датчики с индексами 5).
- сила, соответствующая µ-му датчику перемещения (18-ой позиции соответствуют датчики с индексами 4 (µ=1, 2, 3, 4, …), 19-ой позиции соответствуют датчики с индексами 5).
Практика работы со снарядами показывает, что зависимость (4) близка к линейной. Так, экспериментальная характеристика для снаряда «Лайналог», изображенная на фиг.9, описывается с ошибкой нелинейности не более 5%, формулой:


где kn - общий коэффициент жесткости всех манжет снаряда.
Для исключения из результатов измерения деформаций  погрешностей, вызванных изменением диаметра трубопровода, применены датчики для измерения приращений диаметра трубы 51 и 52 согласно фиг.8. Они установлены в двух рядах датчиков, а именно по окружностям установки датчиков 18 для манжеты 4 и датчиков 19 для манжеты 5. Они смещены по окружностям на половину угла шага датчиков 18 или 19. При этом рычаги 25 с накладками 26 этих датчиков прижаты к внутренней поверхности трубопровода 7. Их конструкция аналогична конструкции датчиков перемещений 18, 19, 20, но рычаги у них длиннее и они закреплены на корпусе 1, в отличие от рычагов 25 датчиков 18, 19, 20, не поверхностью П, а поверхностью R (фиг.4).
погрешностей, вызванных изменением диаметра трубопровода, применены датчики для измерения приращений диаметра трубы 51 и 52 согласно фиг.8. Они установлены в двух рядах датчиков, а именно по окружностям установки датчиков 18 для манжеты 4 и датчиков 19 для манжеты 5. Они смещены по окружностям на половину угла шага датчиков 18 или 19. При этом рычаги 25 с накладками 26 этих датчиков прижаты к внутренней поверхности трубопровода 7. Их конструкция аналогична конструкции датчиков перемещений 18, 19, 20, но рычаги у них длиннее и они закреплены на корпусе 1, в отличие от рычагов 25 датчиков 18, 19, 20, не поверхностью П, а поверхностью R (фиг.4).
На стадии сборки и регулировки снаряда определяются поправки к и 


где D - измеренный диаметр снаряда,
и вычисляются скорректированные значения 


Сигналы датчиков 51, 52 и других позволяют определять приращения диаметров трубопровода 7 в местах установки этих датчиков.
Зная его номинальный диаметр, путем суммирования с сигналами датчиков определяют истинный диаметр и, таким образом, определяют отклонение профиля трубы от окружности и сам профиль.
Торцевая площадь снаряда S0 есть сумма площадей открытой S1 и закрытой S2 частей, т.е.
S0=S1+S2.
Движущая сила равна
Fдв=S2·ΔP; 
где Рзадн, Рпер - полные давления газа на заднюю и переднюю стенки снаряда соответственно (определяются с помощью трубок Пито); сила Fдв зависит от угла φ поворота подвижных лопаток 15:
Fдв=(Pзадн-Pпер)S2;
S2=S-S1; 
φ≤φmax
где φmax - максимальный угол поворота лопаток; RΛ, RΛ0 - наружный и внутренний радиусы проходного отверстия.
Зная алгоритм работы системы управления электродвигателя, составляющего вместе с муфтой и редуктором вентильный электропривод подвижных лопаток, имеем в соответствии со структурной схемой фиг.8 следующие уравнения движения [5]:
В соотношениях (8) и на фиг.8 приняты обозначения: Rэ - активное сопротивление обмотки; Tw, T1 - постоянная времени интегрирующего и форсирующего звена соответственно; е - ЭДС, вырабатываемая в обмотках; См - постоянная по моменту; Се - постоянная по ЭДС двигателя; MT - приведенный к валу электродвигателя момент сопротивления вала с лопатками; U3 - заданное напряжение на входе электропривода; Ω(s)= - угловая скорость ротора электродвигателя; V∗ - заданная (программная) скорость снаряда;
- угловая скорость ротора электродвигателя; V∗ - заданная (программная) скорость снаряда;  - оценка скорости движения снаряда, полученная от одометра; α∗ - заданный (программный) угол поворота вала электродвигателя,
- оценка скорости движения снаряда, полученная от одометра; α∗ - заданный (программный) угол поворота вала электродвигателя,  - передаточное отношение редуктора, равное отношению угловой скорости ротора электродвигателя к угловой скорости подвижных лопаток
- передаточное отношение редуктора, равное отношению угловой скорости ротора электродвигателя к угловой скорости подвижных лопаток  (или, что то же самое - отношению j=α/φ); J - приведенный момент инерции к валу электродвигателя; Jдв - момент инерции ротора электродвигателя привода лопаток; JΛ - момент инерции вала с лопатками; ki - коэффициент передачи по мощности; kT - коэффициент передачи по току; koc - коэффициент обратной связи по угловой скорости Ω(s).
(или, что то же самое - отношению j=α/φ); J - приведенный момент инерции к валу электродвигателя; Jдв - момент инерции ротора электродвигателя привода лопаток; JΛ - момент инерции вала с лопатками; ki - коэффициент передачи по мощности; kT - коэффициент передачи по току; koc - коэффициент обратной связи по угловой скорости Ω(s).
KV, Kα - коэффициенты передачи по скорости ротора снаряда и углу поворота ротора электродвигателя; Uy - напряжение на выходе усилителя 64.
Алгоритм выработки закона изменения заданного программного угла φ∗, а следовательно, угла α∗ поворота ротора электродвигателя для управления через редуктор поворотом лопаток на угол φ∗, изменяющего движущую силу давления газа, включает в себя соотношения, реализуемые в компьютерной модели движения снаряда (реализуемой в бортовом компьютере). Последовательность алгоритмов приведена ниже. Вначале поясним, что истинные параметры и переменные приведены в соотношениях (1)-(8) символами без «крышек» и звездочек. Такие же символы со звездочками или крышками «^» - это оценки соответствующих переменных, т.е. параметры и переменные, определенные по сигналам датчиков или определенные в бортовом компьютере. Вначале приводятся алгоритмы для оценки сил трения. Оценка силы трения от щеток определяется в бортовом компьютере на основании формулы (3) по измерениям датчиков 20, если жесткость секции щеток-магнитопроводов мала по сравнению с жесткостью стоек-пластин 29, или по формуле (3а) в противном случае. На основании формулы (3) имеем:
где  - оценка деформации стойки-пластины 29 по сигналу датчика 20.
- оценка деформации стойки-пластины 29 по сигналу датчика 20.
Оценка сил трения от манжет позиций 4 и 5, деформации которых определяются датчиками 18 и 19, определяются по формулам
Средняя сила для одной манжеты:

Оценка суммарной силы трения  от манжет, число которых равно «χ», и в том числе тех, на которых не установлены датчики, определяют по формуле:
от манжет, число которых равно «χ», и в том числе тех, на которых не установлены датчики, определяют по формуле:

Оценка суммарной силы трения равна:

После этого на основе уравнения (1) определяется оценка движущей силы, необходимой для преодоления суммы сил трения и проекции силы тяжести на продольную ось снаряда - "скатывающей" силы:

Здесь  - оценка угла тангажа, формируемая с помощью приборов ориентации, расположенных в переднем отсеке 10.
- оценка угла тангажа, формируемая с помощью приборов ориентации, расположенных в переднем отсеке 10.
В качестве движущей силы выступает аэродинамическая сила, определяемая с помощью алгоритма



Из соотношений (14) и (15) находим оценку потребного угла φ∗ открытия подвижных заслонок, при котором аэродинамические силы скомпенсируют сумму сил трения и "скатывающих" сил:
Следовательно, α∗=jφ∗, и этот сигнал вводится на вход электропривода по фиг.8 в сигнал U3.
Значение скорости V∗ задается оператором перед запасовкой снаряда в трубопровод или же от специального бортового программного устройства. В этом случае V∗ может быть переменной во времени. Суммарный заданный сигнал U3 равен:

здесь  - оценка скорости ВСД1 по сигналу одометра.
- оценка скорости ВСД1 по сигналу одометра.
Устойчивость и качество работы системы обеспечиваются выбором параметров системы управления электропривода [5].
В установившемся режиме имеем:
Параметры KV0, Кα и Кду, Ку выбираются так, чтобы погрешности были малы, т.е.  - мало.
- мало.
Технический эффект изобретения состоит в повышении точности дефектоскопии магистральных трубопроводов за счет повышения точности измерения и стабилизации скорости снаряда, а также учета в законах управления сил трения щеток-магнитопроводов, манжет, разности полных давлений между передней и задними частями снаряда площади открытых проходов и заданной скорости движения в сравнении с истинной.
Литература
1. Браславский Д.А., Логунов С.С., Пельпор Д.С.: Авиационные приборы. - М.: Машиностроение. 1964. - 740 с.
2. Башта Т.М. Гидропривод и гидропневмоавтоматика. - М.: Машиностроение, 1972. - 320 с.
3. PC 104. Контроллеры серии МЕС 5091. http://lmt/cs/ifmo/ru/pc_mec 5091.html
4. Справочник по технической механике. - М.: ОГИЗ. Гостехиздат.1949. - 734 с. Под редакцией акад. А.Н.Динника.
5. Плотников П.К. Электропривод в приборостроении. - Саратов, СГТУ, 2006-160 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магистральный проходной магнитный дефектоскоп | 2023 |
|
RU2820508C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2395750C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2369783C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| РЕГУЛЯТОР СКОРОСТИ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2013 |
|
RU2533754C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД С УПРАВЛЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2006 |
|
RU2318158C1 |
Изобретение относится к устройствам неразрушающего контроля дефектов стенок магистральных трубопроводов. Внутритрубный снаряд-дефектоскоп с изменяемой скоростью движения содержит цилиндрический корпус, манжеты, подогнанные к корпусу, сквозные проходные отверстия внутри корпуса, одометры, компьютерную систему управления, контейнер с блоками питания и электронного оборудования, привод перепуска газа, устройство для изменения сечения проходного отверстия, магниты, закрепленные на цилиндрическом корпусе, датчики магнитного поля трубопровода, щетки-магнитопроводы, объединенные в секции. При этом снаряд-дефектоскоп снабжен датчиками осевых перемещений в виде устройств по измерению деформаций внутренних торцов манжет, по измерению деформаций секций щеток-магнитопроводов и по измерению вариаций диаметра трубопровода, расположенных по окружности в количестве не менее четырех и не менее двух рядов для устройств по измерению деформаций внутренних торцов манжет и по измерению деформаций секций щеток-магнитопроводов, дополнительным герметичным контейнером в задней части снаряда, двумя приемниками газового давления в виде трубок Пито в передней и задней частях снаряда, закрепленными на переднем и заднем контейнерах, с приемными отверстиями, соответственно направленными по ходу и против хода движения снаряда, приборами ориентации и навигации, компьютерной моделью динамики снаряда в виде дополнительного вычислителя, установленного в переднем контейнере. Устройство для изменения сечения проходных отверстий выполнено в виде четного числа неподвижных, а также подвижных поворотных лопаток. Со входами дополнительного вычислителя соединены выходы соответствующих устройств измерения деформаций манжет, выходы устройств измерения перемещений секций щеток-магнитопроводов, выходы для измерения вариаций диаметра трубопровода, выходы переднего и заднего приемников газового давления, выходы одометров, выход измерителя компоненты кажущегося ускорения, направленного по продольной оси снаряда, а выход датчика угла поворота вала электродвигателя, выходы дополнительного вычислителя соединены с входами компьютерной системы управления электропривода поворотных лопаток снаряда. Изобретение обеспечивает повышение точности дефектоскопии магистральных трубопроводов за счет повышения точности измерения и стабилизации скорости снаряда и упрощение конструкции снаряда-дефектоскопа без снижения эффективности перепуска газа. 3 з.п. ф-лы, 9 ил.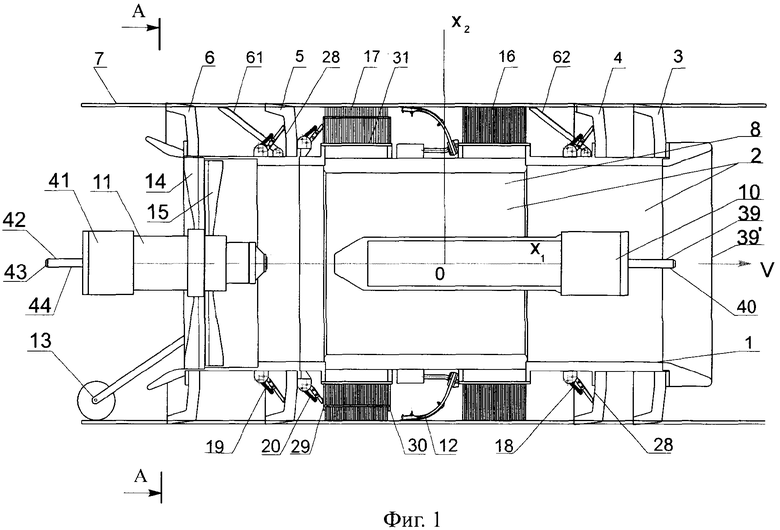
1. Внутритрубный снаряд-дефектоскоп с изменяемой скоростью движения, содержащий цилиндрический корпус, манжеты, подогнанные к корпусу, сквозные проходные отверстия внутри корпуса, одометры, компьютерную систему управления, контейнер с блоками питания и электронного оборудования, привод перепуска газа, устройство для изменения сечения проходного отверстия, магниты, закрепленные на цилиндрическом корпусе, датчики магнитного поля трубопровода, щетки-магнитопроводы, объединенные в секции, отличающийся тем, что введены датчики осевых перемещений в виде устройств по измерению деформаций внутренних торцев манжет, по измерению деформаций секций щеток-магнитопроводов и по измерению вариаций диаметра трубопровода, расположенных по окружности в количестве не менее четырех и не менее двух рядов для устройств по измерению деформаций внутренних торцев манжет и по измерению деформации секций щеток-магнитопроводов, дополнительный герметичный контейнер в задней части снаряда, два приемника газового давления в виде трубок Пито в передней и задней частях снаряда, закрепленные на переднем и заднем контейнерах, с приемными отверстиями, соответственно направленными по ходу и против хода движения снаряда, измеритель компонента кажущегося ускорения, направленного по продольной оси снаряда, компьютерная модель динамики снаряда в виде дополнительного вычислителя, установленного в переднем контейнере, причем устройство для изменения сечения проходных отверстий выполнено в виде четного числа неподвижных, а также подвижных поворотных лопаток, закрепленных на соосном поворотном валу, связанном через редуктор с электродвигателем реверсивного электропривода, причем со входами дополнительного вычислителя соединены выходы соответствующих устройств измерения деформаций манжет, выходы устройств измерения перемещений секций щеток-магнитопроводов, выходы для измерения вариаций диаметра трубопровода, выходы переднего и заднего приемников газового давления, выходы одометров, выход измерителя компонент кажущегося ускорения, направленного по продольной оси снаряда, выход датчика угла поворота вала электродвигателя, выходы дополнительного вычислителя соединены с входами компьютерной системы управления электропривода поворотных лопаток снаряда.
2. Внутритрубный снаряд-дефектоскоп с изменяемой скоростью движения по п.1, отличающийся тем, что датчики осевых перемещений содержат прижимной рычаг, имеющий возможность поворота в опорах вокруг неподвижной оси, закрепленной на основании, установленном на корпусе снаряда, на этой оси укреплен датчик Холла, а на рычаге укреплены постоянные магниты возбуждения, между рычагом и основанием установлена пружина, обеспечивающая прижим головной части рычага в виде накладки к поверхности для измерения ее перемещения.
3. Внутритрубный снаряд-дефектоскоп с изменяемой скоростью движения по п.2, отличающийся тем, что датчики осевых перемещений в виде деформации секций щеток-магнитопроводов дополнительно содержат каркас, охватывающий по периметру секцию щеток-магнитопроводов, сепаратор с отверстиями-ячейками для пропуска через них всех щеток-магнитопроводов, который закреплен по сторонам каркаса, в перпендикулярном направлении к направлению деформации щеток на упругих пластинах, жестко закрепленных на корпусе снаряда на уровне 2/3 высоты щеток от их основания, деформацию поверхности которого измеряют.
4. Внутритрубный снаряд-дефектоскоп с изменяемой скоростью движения по п.2, отличающийся тем, что в датчиках осевых перемещений в виде устройства по измерению деформаций внутренних торцов манжет головная часть прижимного рычага в виде накладки прижата к торцу манжеты, деформацию поверхности которого измеряют, а в датчиках в виде устройства по измерению вариаций диаметра трубопровода головная часть прижимного рычага в виде накладки прижата к внутренней поверхности трубопровода, изменение диаметра которого измеряют, а ось поворота рычага перпендикулярна продольной оси снаряда.
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД С УПРАВЛЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2005 |
|
RU2293612C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| US 6190090 В1, 20.02.2001 | |||
| US 6755916 B1, 29.06.2004 | |||
| US 6370721 B1, 16.04.2002. | |||

