Предлагаемое изобретение относится к весовым дозаторам дискретного действия, преимущественно для дозирования рабочих смесей порошков (РСП) на основе перхлората аммония (ПХА) при приготовлении топливной массы для смесевых твердых ракетных топлив (СТРТ). Дозатор может применяться и в других отраслях промышленности, где имеется необходимость дистанционного весового контроля массы выдаваемых порций порошкообразных компонентов в технологический поток.
РСП в смесительный аппарат подается порциями от 3,0 до 5,5 кг с цикличностью от 25 до 60 секунд. Устанавливаются такие дозаторы обычно в производственных зданиях, где производится приготовление топливной массы. Это обстоятельство требует от конструкции дозатора специального взрывобезопасного исполнения. Кроме того, заказчик твердотопливных изделий требует полной информации о количестве и точности выдаваемых в смесительный аппарат порций каждого компонента, в том числе РСП.
Известные весовые дозаторы порошка, например дозаторы типа ДПД (Орлов С.П. Дозирующие устройства, "Машиностроение", М., 1966. Стр.89-95), предназначены для дозирования различных сыпучих материалов и близки по производительности и точности. Однако такой дозатор не может без значительной доработки применяться для дозирования РСП в производстве СТРТ по условиям безопасности и из-за отсутствия дистанционного контроля и записи информации о количестве и точности выдаваемых доз.
Известен весовой дозатор порошка по патенту России №2288452 с приоритетом 10.03.2005 г. Дозатор предназначен для дозирования РСП и находится в эксплуатации. Этот дозатор принят за прототип.
Он имеет следующие недостатки.
Во-первых, применяемые до настоящего времени силоизмерительные тензометрические датчики отечественного производства имеют довольно значительную погрешность (±0,1%), что требовало использования датчиков с допустимой нагрузкой, равной (1,2…1,5)mд, где mд - масса дозы. При этом массу тары (грузоприемного ковша) приходится компенсировать за счет применения коромысла с противовесом. Коромысло при этом является грузопередающим узлом от грузоприемного ковша к весоизмерителю. Кроме того, для получения на диаграмме вторичного прибора записи в нужном масштабе (например, 40 г/деление) этим же противовесом уравновешивается часть массы дозы в начале набора порции порошка в грузоприемный ковш. Таким образом, после выдачи дозы масса опорожненного ковша на диаграмме не прописывается. В результате отсутствует информация об изменении массы ковша от налипания порошка на ковш.
Во-вторых, наличие коромысла усложняет эксплуатацию дозатора, т.к. требуется постоянное поддержание в чистоте и смазке нескольких пар подшипников в шарнирах коромысла, чтобы поддерживать чувствительность весоизмерительной системы в необходимых пределах. При этом и собственно операции сборки, монтажа и настройки весоизмерительной системы с коромыслом и противовесом требуют значительных трудозатрат и высокой квалификации обслуживающего персонала.
В-третьих, наличие двуплечего коромысла с центральной шарнирной опорой способствует возникновению колебаний весовой системы в случае динамического воздействия на одно из его плеч при наборе и опорожнении дозы порошка. Указанные колебания имеют значительную амплитуду и продолжительность, что негативно воздействует на процесс измерения и удлиняет время цикла дозирования, снижая производительность дозатора. Для уменьшения амплитуды и длительности колебаний в конструкцию весоизмерителя необходимо введение специального успокоителя колебаний, что усложняет конструкцию, требует дополнительного обслуживания и повышает трудоемкость эксплуатации дозатора.
В-четвертых, при опорожнении ковша на весоизмерительную систему и, в том числе, на тензометрический силоизмерительный датчик передаются значительные динамические нагрузки, что вызывает ускоренный износ элементов весоизмерительной системы и снижение надежности дозатора.
Технической задачей, на решение которой направлено предлагаемое изобретение, является разработка весового дозатора порошка с повышенной надежностью и точностью, упрощение его конструкции, а также обеспечение удобства обслуживания и снижение трудоемкости при эксплуатации дозатора.
Технический результат достигается тем, что дозатор состоит из питателя с приводом, системы измерения и управления, грузоприемного ковша, связанного через грузопередающее устройство с тензометрическим весоизмерителем повышенной точности. Применение более совершенного тензометрического весоизмерителя с погрешностью ±0,02% (т.е. в пять раз более точного по сравнению с применяемыми в настоящее время отечественными датчиками) позволяет устанавливать датчик с грузоподъемностью 1,2…1,5(mт+mд), где mт - масса грузоприемного ковша; mд - масса дозы порошка. Обычно масса ковша составляет (1,0…1,5) массы дозы порошка. Т.е. даже при использовании весоизмерителя с грузоподъемностью примерно в 2,5 раза выше грузоподъемности датчика, применяемого в существующей конструкции дозатора, точность взвешивания повышается в два раза. Это позволяет упростить конструкцию весоизмерительной системы за счет исключения из нее коромысла с противовесом и успокоителя колебаний, снизить трудоемкость при обслуживании дозатора и повысить надежность его. Для исключения динамического воздействия на весоизмерительную систему и, таким образом, для повышения надежности дозатора в конструкцию введено устройство для арретирования весовой системы во время операции опорожнения ковша. Для упрощения конструкции и снижения трудоемкости при обслуживании грузопередающий узел выполнен в виде нагрузочного рычага с подвесом.
Для обеспечения заданного масштаба записи на самопишущем приборе в систему измерения и управления введены два блока: блок компенсации массы тары и блок решающих усилителей.
Сущность предлагаемого изобретения поясняется следующими чертежами.
На фиг.1 схематично изображен предлагаемый весовой дозатор порошка, где
1 - питатель; 2 - грузоприемный ковш; 3 - тяга; 4 - весоизмеритель; 5 - нагрузочный рычаг; 6 - шарнирная опора; 7 - подвес; 8 - диск; 9 - пневмопривод опорожнения ковша; 10 - вилка; 11 - система измерения и управления; 12 - подхват; 13 - пружина; 14 - опорная плита; 15 - упор; 16 - стержень; 17 - блок компенсации массы тары; 18 - блок решающих усилителей; 19 - самопишущий прибор; 20 - блок логико-программного управления.
На фиг.2 показано устройство нагрузочного рычага и крепление к нему тяги, где
3 - тяга; 4 - весоизмеритель; 5 - нагрузочный рычаг; 6 - шарнирная опора; 7 - подвес; 8 - диск; 14 - опорная плита; 21 - подшипник.
На фиг.3 показано поперечное сечение нагрузочного рычага, где
3 - тяга; 5 - нагрузочный рычаг; 7 - подвес; 8 - диск; 14 - опорная плита; 21 - подшипник; 22 - палец; 23 - винт.
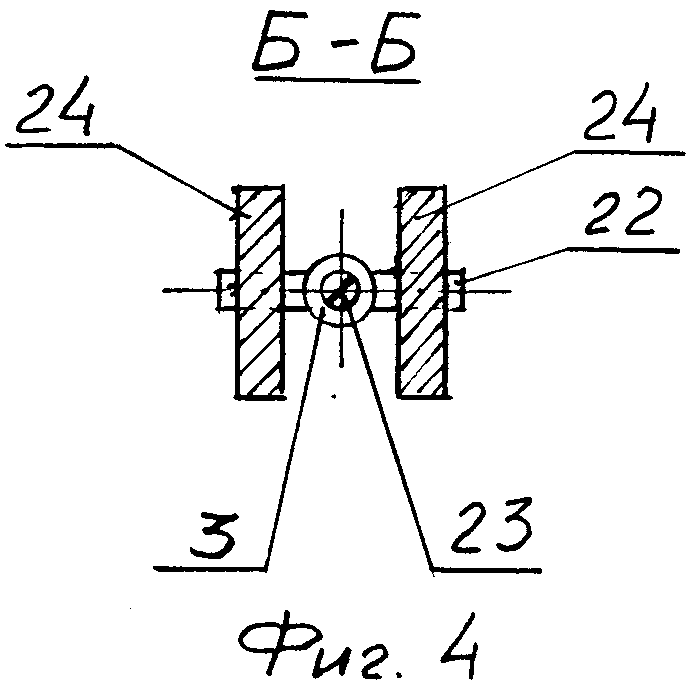
На фиг.4 показан разрез верхней части подвеса, где
3 - тяга; 22 - палец; 23 - винт; 24 - щека.
Весовой дозатор порошка (фиг.1) состоит из питателя 1, грузоприемного ковша 2, весоизмерителя 4, в качестве которого установлен тензометрический силоизмеритель, пневмоцилиндра опорожнения 9 с вилкой 10, системы измерения и управления 11, нагрузочного рычага 5. Рычаг 5 одним концом закреплен на шарнирной опоре 6, другой его конец опирается на чувствительный элемент весоизмерителя 4. На нагрузочном рычаге 5 закреплен подвес 7, который имеет две симметричные щеки 24. Между щеками выполнен вертикальный паз. В верхней части щек выполнены овальные отверстия. При этом большая ось овала расположена вертикально. В нижней части щек закреплены на осях подшипники 21. Подвес служит для подвешивания в нем грузоприемного ковша 2 с помощью тяги 3. Для этого в тягу 3 через овальные отверстия щек 24 вставлен палец 22. Палец 22 фиксируется относительно тяги 3 винтом 23. Таким образом тяга 3 центруется в подвесе 7: в одном направлении - пальцем 22 в овальных отверстиях щек 24, а в перпендикулярном направлении - подшипниками 21. В дозаторе установлено устройство для арретирования грузоприемного ковша 2 во время его опорожнения. Это устройство состоит из подхвата 12, диска 8, закрепленного на тяге 3, стержня 16 и пружины 13. Стержень 16 закреплен в опорной плите 14 с возможностью вертикального перемещения. Подхват 12 закреплен на стержне 16. На нижнем торце стержня 16 выполнен упор 15 в виде выступа, который упирается в нижнюю поверхность вилки 10. Когда при опорожнении ковша вилка 10 поднимается пневмоцилиндром 9, стержень 16 имеет возможность с помощью пружины 13 переместиться вверх и подхватом 12 прижать диск 8 к плите 14, произведя арретирование весовой системы. При этом тяга 3 на несколько миллиметров поднимается в пазу подвеса 7, соответственно палец 22 перемещается в овальных отверстиях щек 24. Таким образом, весовая система (рычаг 5 и весоизмеритель 4) разгружается, а грузоприемный ковш 2 через тягу 3 фиксируется во время опорожнения ковша. После опорожнения ковша вилка 10 пневмоцилиндром 9 опускается и, перемещаясь вниз по стержню 16, в нижней фазе перемещения нажимает на упор 15, закрепленный на стержне. При этом вилка 10 преодолевает усилие пружины 13 и опускает стержень 16 вместе с подхватом 12 в нижнее положение, освобождая от фиксации ковш 2 вместе с тягой 3 и диском 8. Палец 22 при этом опускается в овальных отверстиях щек 24 и ковш повисает на подвесе 7 рычага 5, воздействуя на весоизмеритель 4. Операция опорожнения ковша и одновременного его арретирования закончена, дозатор готов к набору очередной порции порошка. По сигналу системы управления включается операция набора дозы порошка в ковш 2. При достижении заданной массы дозы питатель 1 прекращает подачу порошка в ковш. Затем производится опорожнение ковша с одновременным арретированием весовой системы. Далее цикл дозирования повторяется.
Для осмотра, чистки и смазки подшипников 21 в случаях, когда по какой-то причине происходит потеря чувствительности весовой системы, производится частичная разборка весовой системы. Для этого выворачивают винт 23, вынимают палец 22 из отверстия в тяге 3. Тяга 3 вместе с ковшом 2 опускаются и диском 8 опираются на подхват 12. После этого, благодаря наличию сквозного паза между щеками 24 подвеса 7, рычаг 5 можно свободно повернуть относительно шарнира 6 вверх на 120-160°, сняв таким образом его с чувствительного элемента весоизмерителя 4. При этом к подшипникам 21 открывается свободный доступ, их можно осмотреть, почистить и смазать, проверить, насколько свободно они вращаются.
Для обеспечения нужного масштаба записи на самопишущем приборе в систему измерения и управления введены два блока: блок компенсации массы тары и блок решающих усилителей.
Таким образом, благодаря применению в качестве весоизмерителя 4 более точного датчика из конструкции дозатора исключены коромысло с противовесом, успокоитель колебаний. При этом исполнение грузопередающего узла в виде нагрузочного рычага 5 с подвесом 7, в котором выполнен сквозной паз между щеками 24, позволяет упростить обслуживание подшипников 21. Такое упрощение весоизмерительной системы позволяет значительно снизить трудозатраты на обслуживание дозатора.
Введение в конструкцию дозатора арретира позволяет исключить динамические воздействия на весоизмерительную систему и повысить надежность дозатора.
В настоящее время разработаны рабочие чертежи предлагаемого дозатора, ведется его изготовление.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2013 |
|
RU2548611C2 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2005 |
|
RU2288452C1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2007 |
|
RU2343427C1 |
| ВЕСОВОЙ ДОЗАТОР ДИСКРЕТНОГО ДЕЙСТВИЯ ДЛЯ ВЗРЫВООПАСНЫХ ПОРОШКООБРАЗНЫХ МАТЕРИАЛОВ | 2002 |
|
RU2235978C1 |
| ОБЪЕМНЫЙ ДОЗАТОР ЖИДКОСТИ | 2004 |
|
RU2271520C1 |
| ВЕСОВОЙ ДОЗАТОР ЖИДКОСТИ | 2005 |
|
RU2282832C1 |
| Автоматический дозатор порошка | 1978 |
|
SU737789A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ТОПЛИВНОЙ МАССЫ ДЛЯ ЗАРЯДА ИЗ СМЕСЕВОГО ТВЕРДОГО РАКЕТНОГО ТОПЛИВА | 2006 |
|
RU2316524C1 |
| Весовой дозатор жидкости | 1987 |
|
SU1643943A1 |
| ВЕСОВОЙ ДОЗАТОР ЖИДКОСТИ | 2008 |
|
RU2378621C1 |


Изобретение относится к средствам дозирования и предназначено для дозирования рабочих смесей порошков на основе перхлората аммония при приготовлении топливной массы для смесевых твердых ракетных топлив. Дозатор может применяться и в других отраслях промышленности, где имеется необходимость дистанционного весового контроля массы выдаваемых порций порошкообразных компонентов в технологический поток. Изобретение направлено на повышение точности дозирования, на упрощение конструкции и снижение трудоемкости при эксплуатации, сочетаемой с надежностью. Этот результат обеспечивается за счет того, что грузопередающий узел в дозаторе выполнен в виде нагрузочного рычага, один конец которого опирается на шарнир, а второй на чувствительный элемент весоизмерителя. В центральной части нагрузочного рычага имеется подвес с двумя вертикальными щеками, разделенными между собой сквозным пазом, в щеках через овальные отверстия установлен палец, связанный с тягой с возможностью ее вертикального перемещения. Грузоприемный ковш снабжен арретиром, состоящим из подпружиненного стержня с подхватом, и упором, взаимодействующим с вилкой пневмоцилиндра опорожнения ковша. Система измерения и управления содержит блок компенсации массы тары и блок решающих усилителей. 4 ил.
Весовой дозатор порошка, состоящий из питателя, грузоприемного ковша с тягой, грузопередающего узла, весоизмерителя, пневмоцилиндра опорожнения ковша с вилкой и системы измерения и управления, отличающийся тем, что грузопередающий узел выполнен в виде нагрузочного рычага, один конец которого опирается на шарнир, а второй на чувствительный элемент весоизмерителя, в центральной части нагрузочного рычага имеется подвес с двумя вертикальными щеками, разделенными между собой сквозным пазом, в щеках через овальные отверстия установлен палец, связанный с тягой с возможностью ее вертикального перемещения, грузоприемный ковш снабжен арретиром, состоящим из подпружиненного стержня с подхватом и упором, взаимодействующим с вилкой пневмоцилиндра опорожнения ковша, система измерения и управления содержит блок компенсации массы тары и блок решающих усилителей.
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2005 |
|
RU2288452C1 |
| ВЕСОВОЙ ДОЗАТОР ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 1999 |
|
RU2175757C2 |
| JP 58105021 A, 22.06.1983 | |||
| Несущая опора | 1984 |
|
SU1155654A1 |

