Предлагаемое изобретение относится к весовым дозаторам порошка дискретного действия, преимущественно для дозирования рабочих смесей порошков (РСП) на основе перхлората аммония (ПХА) при приготовлении топливной массы для смесевых твердых ракетных топлив (СТРТ). Дозатор может применяться и в других отраслях промышленности, где имеется необходимость дистанционного весового контроля массы выдаваемых порций порошкообразных компонентов в технологический поток.
РСП в смесительный аппарат подается порциями от 4,5 до 5,5 кг с цикличностью от 25 до 60 секунд. Устанавливаются такие дозаторы обычно в производственных зданиях, где производится приготовление топливной массы. Это обстоятельство требует от конструкции дозатора специального взрывобезопасного исполнения. Кроме того, заказчик твердотопливных изделий требует полной информации о количестве и точности выдаваемых в смесительный аппарат порций каждого компонента, в том числе РСП. По требованиям технологического регламента для контроля за процессом дозирования РСП цена каждого из ста делений шкалы самопишущего прибора, контролирующего процесс дозирования, не должна превышать 40 г. Поскольку шкала прибора разгоняется на величину, соответствующую максимальной дозе, т.е. 5500 г, то с учетом использования шкалы в рабочем диапазоне (это обычно составляет 75% от всей шкалы, или 75 делений) цена одного деления составит более 70 граммов, что почти в два раза превышает допустимый предел. Это обстоятельство вызывает необходимость повышения разрешающей способности самопишущего прибора.
Известные весовые дозаторы для порошка, например, дозаторы типа ДПД (Орлов С.П. Дозирующие устройства, "Машиностроение". М. 1966. Стр.89-95) предназначены для дозирования различных сыпучих материалов и близки по производительности и точности. Однако такой дозатор не может без значительной доработки применяться для дозирования РСП в производстве СТРТ по условиям безопасности и из-за отсутствия дистанционного контроля и записи информации о количестве и точности выдаваемых доз.
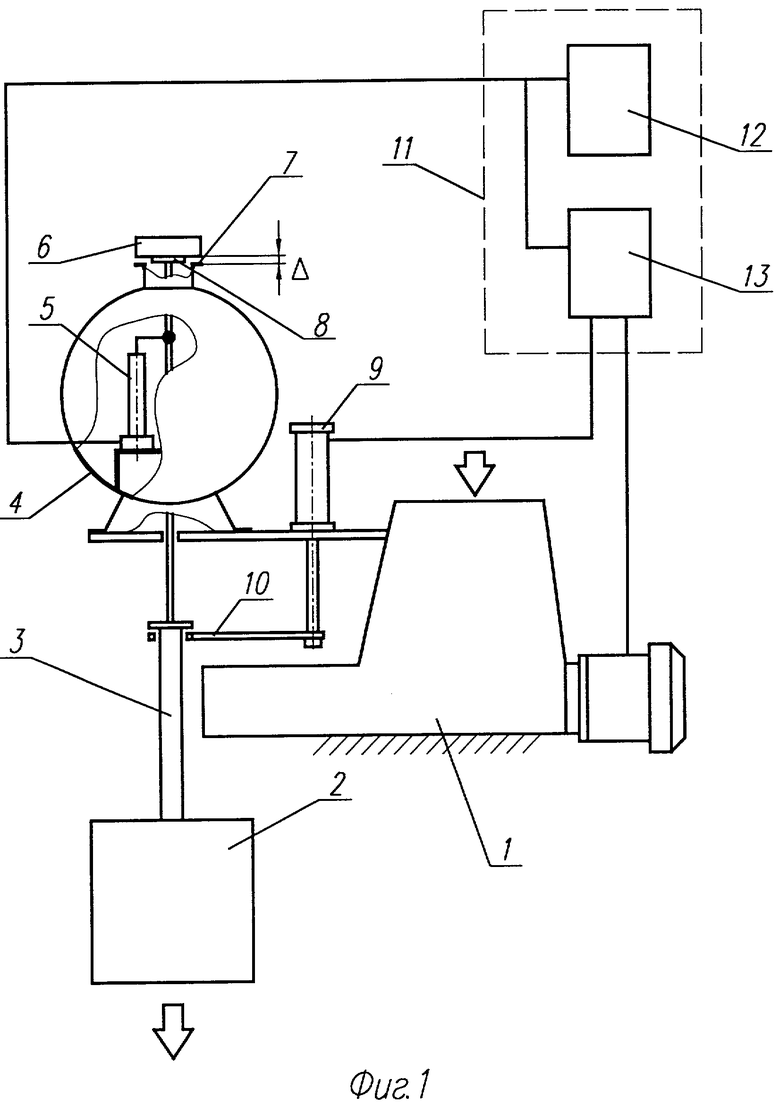
Известен весовой дозатор УДП-1500 (черт. К91.00.00.00; 1977 г.) для РСП, разработанный на предприятии ФГУП "НИИПМ" в г.Перми, который эксплуатируется на ряде заводов отрасли. Этот дозатор принят за прототип. Дозатор (см. Фиг.1) состоит из питателя 1, грузоприемного ковша 2, соединенного с весоизмерителем 4 грузоприемной тягой 3. В качестве весоизмерителя применена весовая головка типа УЦК квадрантного типа с встроенным датчиком 5. Весовая головка весоизмерителя 4 доработана так, что грузоприемная тяга 3 проходит через верхнюю часть корпуса головки и снабжена площадкой 8, на которой размещается накладная гиря 6. Для опорожнения грузоприемного ковша 2 служит пневмоцилиндр 9, который своей вилкой 10 открывает ковш. Дозатор также снабжен системой измерения и управления 11, в которую входят самопишущий прибор 12 и блок управления 13. Дозатор работает следующим образом. При включении дозатора включается привод питателя. Порошок из бункера питателя подается в грузоприемный ковш 2. Грузоприемная тяга 3 перемещается вниз и величина ее перемещения пропорциональна массе набираемого в ковш 2 порошка. Это перемещение измеряется датчиком 5 и передается в систему измерения и управления 11 и, соответственно, на самопишущий прибор 12 и блок управления 13. Для обеспечения требуемой разрешающей способности самопишущего прибора (40 г на одно деление) в этом дозаторе применена накладная гиря 6, которая в начальной фазе набора порции порошка в ковш 2 находится на площадке 8 и опускается вместе с ней и грузоприемной тягой 3 по мере поступления порошка в ковш 2. При достижении некоторой массы порошка ковш 2 вместе с грузоприемной тягой 3 и площадкой 8 опустится вниз настолько, что зазор А будет полностью выбран, а гиря 6 опустится на опорное кольцо 7 весоизмерителя (см. Фиг.2). С этого момента тяга 3 не будет перемещаться вниз до тех пор пока суммарная масса порошка в ковше не превысит массу предварительно набранного порошка до момента соприкосновения гири 6 с опорным кольцом 7 и массы накладной гири 6. Также в это время не будет перемещаться плунжер датчика 5, т.е. с датчика будет поступать на самопишущий прибор постоянный сигнал, а указатель прибора 12 также будет показывать постоянную массу порошка в ковше, которая была набрана до того момента, когда гиря 6 опустилась на опорное кольцо 7. После того как суммарная масса порошка в ковше 2 превысит массу порошка предварительно набранного до соприкосновения гири 6 с опорным кольцом 7 и массу гири 6, грузоприемный ковш 2 вместе с грузоприемной тягой 3 снова начнет перемещаться вниз, а гиря 6 останется лежать на кольце 7. При этом сигнал с датчика также начнет изменяться пропорционально массе поступающего в ковш 2 порошка. На диаграмме самопишущего прибора 12 будет записываться заключительная фаза набора дозы порошка в ковш 2. При достижении заданной массы дозы система измерения и управления 11 формирует сигнал на прекращение набора, привод питателя останавливается. Таким образом, на диаграмме самопишущего прибора 12 записываются начальная и конечная фазы набора дозы, т.е. только часть массы дозы, равная разнице между заданной массой дозы и массой накладной гири. Этот прием обеспечивает разрешающую способность самопишущего прибора - 40 граммов на одно деление для контроля за процессом дозирования. Затем по истечении заданного времени цикла производится опорожнение грузоприемного ковша 2. Для этого включается пневмоцилиндр 9 и вилкой 10 открывает ковш 2. Доза порошка ссыпается в технологический поток, после чего цикл работы дозатора повторяется.
Этот дозатор имеет следующие недостатки. Во-первых, применяемая в качестве весоизмерителя весовая головка типа УЦК морально устарела и, кроме того, для ее использования в дозаторе ее необходимо дорабатывать, вводить в ее конструкцию ряд нестандартных узлов. Во-вторых, этот весоизмеритель не имеет устройства для дистанционной передачи информации о текущей массе взвешиваемого продукта. Известные в таких системах передающие устройства сельсинного типа не обладают необходимой точностью. Кроме того, они не имеют достаточной степени защиты для применения в производстве СТРТ. По этой причине в весовую головку установили датчик, который фактически измеряет перемещение грузоприемной тяги 3, пропорциональное взвешиваемой массе продукта, и передает этот измерительный сигнал на самопишущий прибор 12, расположенный в помещении пульта управления. Все эти доработки приводят к тому, что весоизмеритель становится нестандартным средством измерения, что снижает его надежность при эксплуатации.
Технической задачей, на решение которой направлено предлагаемое изобретение, является разработка весового дозатора порошка с повышенной надежностью и точностью, а также обеспечение удобства его эксплуатации.
Технический результат достигается тем, что в дозаторе, состоящем из питателя с приводом, весоизмерителя, грузоприемного ковша, связанного с весоизмерителем, а также системы измерения и управления, в качестве весоизмерителя установлен тензометрический силоизмеритель. При этом с учетом особенностей тензометрического силоизмерителя в каждом цикле дозирования измерение массы заполненного и опорожненного грузоприемного ковша производится в одном узком диапазоне нагрузочной характеристики силоизмерителя. Для этого предусмотрена гиря-имитатор, которая с помощью пневмоцилиндра нагружает весоизмеритель во время измерения количества налипшего порошка в ковше после выдачи дозы.
Для обеспечения удобства эксплуатации и точности контроля дозирования предусмотрено повышение масштаба записи на самопишущем приборе в процессе набора дозы, а также дополнительное повышение масштаба записи при фиксации погрешности выданной дозы. С этой целью в механическую часть весоизмерительного узла введен узел коромысла с противовесом, масса которого уравновешивает массу грузоприемной системы, включающей грузоприемный ковш, грузоприемную тягу и площадку для гири-имитатора, а также часть массы дозы, чтобы обеспечить необходимый масштаб записи на самопишущем приборе. Для дополнительного повышения масштаба записи при фиксации погрешности выданной дозы в систему измерения и управления включен блок-формирователь сигнала записи на диаграмме самопишущего прибора.
Таким образом, установка в дозаторе в качестве весоизмерителя тензометрического силоизмерителя повышает надежность дозатора, а применение гири-имитатора, коромысла с противовесом и блока-формирователя сигнала записи на диаграмме самопишущего прибора в системе измерения и управления позволяет повысить точность дозирования и обеспечить удобство эксплуатации.
Сущность предлагаемого изобретения поясняется следующими чертежами.
На фиг.1 схематично изображен дозатор УДП, принятый в качестве прототипа.
1 - питатель;
2 - грузоприемный ковш;
3 - грузоприемная тяга;
4 - весоизмеритель;
5 - датчик;
6 - накладная гиря;
7 - опорное кольцо;
8 - площадка;
9 - пневмоцилиндр опорожнения ковша;
10 - вилка;
11 - система измерения и управления;
12 - самопишущий прибор;
13 - блок управления.
На фиг.2 показано положение грузоприемной тяги 3 и накладной гири 6, когда закончена начальная фаза заполнения ковша.
3 - грузоприемная тяга;
4 - весоизмеритель;
6 - накладная гиря;
7 - опорное кольцо;
8 - площадка.
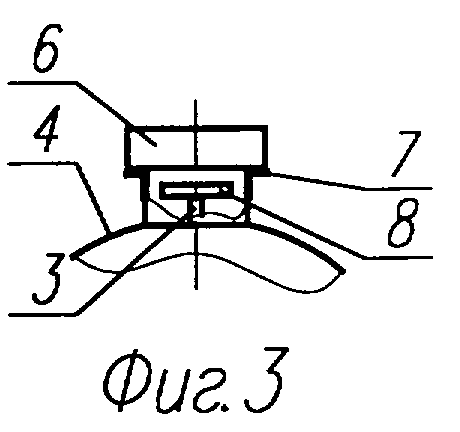
На фиг.3 показано положение грузоприемной тяги 3 и накладной гири 6, когда происходит заключительная фаза заполнения ковша.
3 - грузоприемная тяга;
4 - весоизмеритель;
6 - накладная гиря;
7 - опорное кольцо;
8 - площадка.
На фиг.4 схематично изображен предлагаемый весовой дозатор порошка.
1 - питатель;
2 - грузоприемный ковш;
3 - грузоприемная тяга;
4 - весоизмеритель;
8 - площадка;
9 - пневмоцилиндр опорожнения ковша;
10 - вилка;
11 - система измерения и управления;
12 - самопишущий прибор;
13 - блок управления;
14 - блок-формирователь сигнала записи на диаграмме;
15 - противовес;
16 - шарнирная опора;
17 - коромысло;
18 - гиря-имитатор;
19 - подхват;
20 - пневмоцилиндр управления гирей-имитатором.
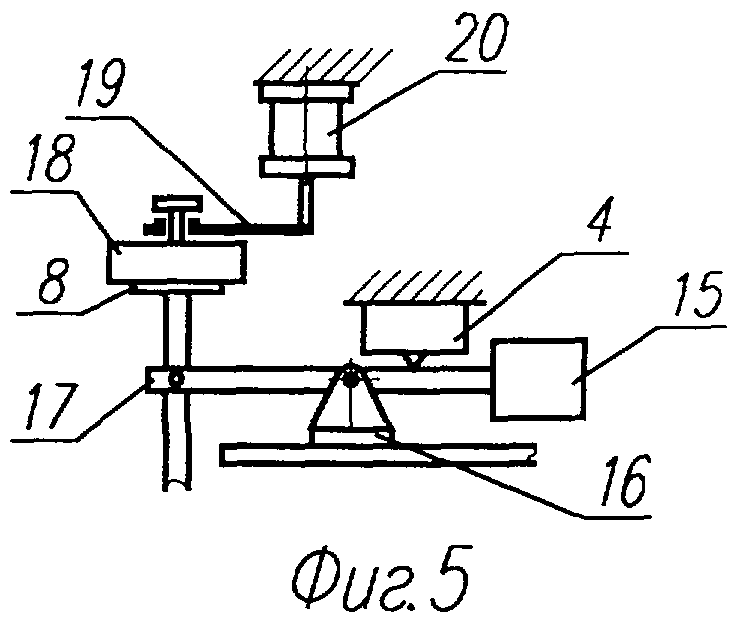
На фиг.5 показано положение гири-имитатора во время измерения остатка в ковше после выдачи дозы.
4 - весоизмеритель;
8 - площадка;
15 - противовес;
16 - шарнирная опора;
17 - коромысло;
18 - гиря-имитатор;
19 - подхват;
20 - пневмоцилиндр управления гирей-имитатором.
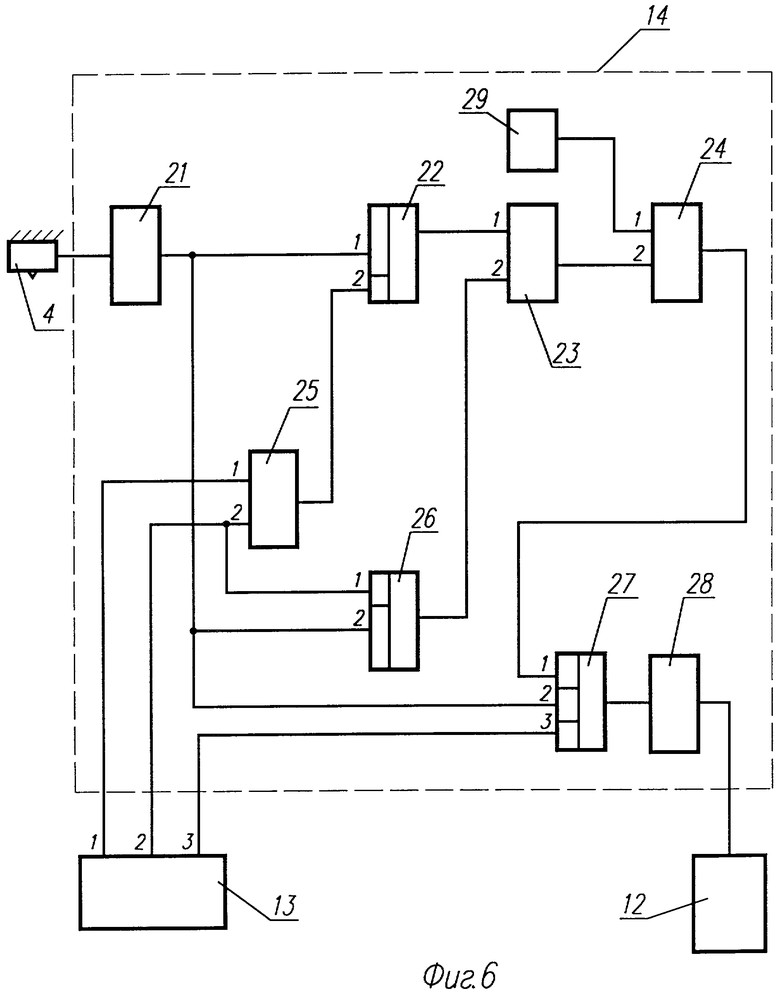
На фиг.6 изображена схема блока-формирователя сигнала записи на диаграмме самопишущего прибора.
4 - весоизмеритель;
12 - самопишущий прибор;
13 - блок управления;
14 - блок-формирователь сигнала записи на диаграмме;
21 - аналого-цифровой преобразователь (АЦП);
22 - первый регистр;
23 - элемент вычитания;
24 - сумматор;
25 - элемент ИЛИ;
26 - второй регистр;
27 - коммутатор;
28 - цифроаналоговый преобразователь (ЦАП);
29 - блок задания нулевого кода.
Весовой дозатор порошка (фиг.4) состоит из питателя 1, грузоприемного ковша 2, весоизмерителя 4, в качестве которого установлен тензометрический силоизмеритель, пневмоцилиндра опорожнения 9 с вилкой 10, системы измерения и управления 11, коромысла 17 с противовесом 15. Коромысло 17 установлено на шарнирной опоре 16. Грузоприемный ковш 2 шарнирно соединен с коромыслом 17 с помощью грузоприемной тяги 3, в верхней части которой закреплена площадка 8 для гири-имитатора 18. При работе дозатора предусмотрено два положения гири-имитатора 18: во время набора дозы гиря поднята с помощью пневмоцилиндра 20 подхватом 19 над площадкой 8 и не касается ее, а во время взвешивания остатка порошка в ковше 2 после выдачи дозы гиря 18 опускается пневмоцилиндром 20 и подхватом 19 на площадку 8 (см. фиг.5). Система измерения и управления 11 содержит блок-формирователь 14 сигнала записи на диаграмме самопишущего прибора, самопишущий прибор 12 и блок управления 13. Блок-формирователь 14 сигнала записи на диаграмме самопишущего прибора (фиг.6) состоит из следующих элементов: аналого-цифрового преобразователя 21, первого регистра 22, второго регистра 26, коммутатора 27, элемента вычитания 23, сумматора 24, логического элемента ИЛИ 25, цифроаналогового преобразователя (ЦАП) 28 и блока задания нулевого кода 29.
Противовес 15 имеет массу, которая уравновешивает массу грузоприемной системы, в которую входят грузоприемный ковш 2, грузоприемная тяга 3 и площадка 8, а, кроме того, определенную часть массы дозы порошка. Масса противовеса 15 при равенстве плеч коромысла рассчитывается по следующей формуле:
Мпр=(Мд-m×n)+Мг с,
где Мпр - масса противовеса;
Мд - масса дозы;
m - масштаб записи на диаграмме самопишущего прибора;
n - число делений шкалы прибора в рабочем диапазоне;
Мг с - масса грузоприемной системы.
Так, например, допустимый по технологическому регламенту масштаб записи на диаграмме самопишущего прибора для надежного контроля за набором дозы равен 40 г на одно деление шкалы. Рабочий диапазон шкалы прибора обычно принимается от нуля до 75го деления. Тогда в рабочем диапазоне будет записываться: 40×75=3000 г. Если заданная масса дозы Мд=5500 г, а масса грузоприемной системы Мг с=6000 г, то расчетная масса противовеса будет:
Мпр=(5500-3000)+6000=8500 г.
И в этом случае за нулем шкалы будет происходить заполнение грузоприемного ковша до 2500 г, а процесс набора остальных 3000 г будет записываться на диаграмме самопишущего прибора от нулевого до 75го деления шкалы.
Дозатор работает следующим образом. При включении дозатора включается привод питателя. Порошок из бункера питателя подается в грузоприемный ковш 2. В момент достижения массы порошка в ковше 2, уравновешиваемой противовесом 15, коромысло начинает воздействовать на чувствительный элемент весоизмерителя 4 и на самопишущем приборе 12 начинается пропись процесса набора оставшейся части дозы. При достижении заданной массы порции блок управления 13 формирует сигнал на отключение привода питателя 1, прекращая подачу порошка в грузоприемный ковш 2. По истечении заданного времени цикла происходит опорожнение грузоприемного ковша 2. Для этого подается сжатый воздух в нижнюю полость пневмоцилиндра 9 и вилкой 10 производится раскрытие ковша. Порция порошка из ковша ссыпается в последующий технологический аппарат (транспортер, смеситель и т.п.). Для замера величины налипшего остатка порошка в ковше 2 после его опорожнения производится наложение гири-имитатора 18 на площадку 8 с помощью пневмоцилиндра 20 и подхвата 19. Гиря-имитатор 18 по массе равна заданной дозе, поэтому измерение массы остатка порошка в ковше 2 при наложенной на площадку гире-имитаторе 18 производится в том же диапазоне характеристики тензометрического весоизмерителя 4, что и измерение набранной дозы порошка. После замера величины остатка порошка в ковше 2, расчета системой измерения и управления 11 погрешности выданной дозы блок управления 13 дает сигнал на пневмоцилиндр 20, который с помощью подхвата 19 поднимает гирю-имитатор 18, снимая ее с площадки 8.
Во время операции набора порции работа блока-формирователя сигнала записи 14 на диаграмме самопишущего прибора состоит в следующем. Аналоговый сигнал с весоизмерителя 4 поступает в блок-формирователь сигнала записи 14. Преобразуется в цифровой код, проходя через аналого-цифровой преобразователь 21, затем поступает на вход 2 коммутатора 27, с выхода коммутатора 27 поступает в цифроаналоговый преобразователь 28. Преобразованный снова в аналоговый сигнал поступает на выход из блока 14 и на вход самопишущего прибора 12. При этом уровень входного сигнала на блок 14 равен уровню выходного сигнала с блока 14 и пропорционален нагрузке на весоизмеритель 4. В то же время сигнал с аналого-цифрового преобразователя 21 поступает на первый вход первого регистра 22 и на второй вход второго регистра 26. После окончания набора дозы блок управления 13 формирует импульс записи в регистры 22 и 26. При этом в регистр 22 импульс поступает через элемент ИЛИ 25. На выходах регистров 22 и 26 появляется код сигнала набранной дозы. Поскольку сигналы одинаковые по величине, то после прохождения через элемент вычитания 23 на его выходе формируется код "ноль", не изменяющий значение выходного сигнала сумматора 24, на выходе которого формируется код нуля погрешности дозы, задаваемый блоком 29.
При включении операции выдачи блок управления 13 формирует и подает на третий вход коммутатора 27 сигнал переключения коммутатора. Код сигнала массы со второго входа коммутатора 27 отключается, а подключается выходной код блока 24, т.е. сигнал с первого входа коммутатора 27 проходит на выход блока 27, затем через блок 28 (ЦАП) и далее на самопишущий прибор 12. На самопишущем приборе 12 прописывается запись, обозначающая погрешность, равную нулевому уровню. Обычно эта запись выводится на 20е-25е деление шкалы прибора для удобства наблюдения обслуживающим персоналом. Нужное деление определяется выходным сигналом блока задания нулевого кода. После опорожнения ковша и наложения гири-имитатора 18 на площадку 8 блок управления 13 формирует сигнал, который подается на первый вход элемента ИЛИ 25, в результате чего на выходе элемента 25 формируется сигнал, который поступает на второй вход регистра 22. В регистре 22 записывается код приведенного остатка (масса гири-имитатора+масса остатка порошка в ковше). Этот сигнал с регистра 22 идет на блок вычитания 23, на входе 1 которого присутствует код массы набранной дозы. Разность кодов, подаваемых на входы блока вычитания 23, на его выходе дает код погрешности дозы. Поскольку в этом же блоке 23 выполняется операция умножения, сигнал на выходе увеличивается в 2 раза, увеличивая соответственно масштаб записи на приборе 12 в два раза - с 40 до 20 граммов на одно деление шкалы прибора. На диаграмме самопишущего прибора производится пропись погрешности выданной дозы, которая является алгебраической суммой сигналов погрешности набора и погрешности выдачи. Погрешностью выдачи в данном случае является масса налипшего в ковше остатка порошка после опорожнения ковша. Увеличение разрешающей способности самопишущего прибора за счет увеличения масштаба при записи погрешности каждой выданной дозы обеспечивает удобство эксплуатации дозатора за счет того, что обслуживающий персонал и контрольные службы могут более точно определять погрешность каждой выданной дозы.
После прописи погрешности дозы и снятия пневмоцилиндром 20 и подхватом 19 гири-имитатора 18 с площадки 8 блок управления 13 снимает сигнал с третьего входа коммутатора 27, и схема блока-формирователя 14 возвращается в исходное состояние, когда аналоговый сигнал на входе в блок 14 равен аналоговому сигналу на его выходе и, соответственно, на входе самопишущего прибора 12.
Использование в дозаторе в качестве весоизмерителя тензометрического силоизмерителя повышает надежность дозатора, а применение гири-имитатора с пневмоцилиндром, коромысла с противовесом, уравновешивающим массу грузоприемной системы и часть массы дозы, а также блока-формирователя сигнала записи на диаграмме самопишущего прибора повышает точность дозирования и обеспечивает удобство эксплуатации дозатора.
Дозатор испытан в опытно-промышленных условиях с положительными результатами, запланировано его внедрение в производство в 2005 году.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2007 |
|
RU2343427C1 |
| ВЕСОВОЙ ДОЗАТОР ЖИДКОСТИ | 2005 |
|
RU2282832C1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2008 |
|
RU2383872C1 |
| ВЕСОВОЙ ДОЗАТОР ЖИДКОСТИ | 2008 |
|
RU2378621C1 |
| ВЕСОВОЙ ДОЗАТОР ДИСКРЕТНОГО ДЕЙСТВИЯ ДЛЯ ПОРОШКООБРАЗНЫХ МАТЕРИАЛОВ | 2012 |
|
RU2485450C1 |
| ВЕСОВОЙ ДОЗАТОР ДИСКРЕТНОГО ДЕЙСТВИЯ ДЛЯ ВЗРЫВООПАСНЫХ ПОРОШКООБРАЗНЫХ МАТЕРИАЛОВ | 2002 |
|
RU2235978C1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU901837A1 |
| ОБЪЕМНЫЙ ДОЗАТОР ЖИДКОСТИ | 2004 |
|
RU2271520C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ТОПЛИВНОЙ МАССЫ ДЛЯ ЗАРЯДА ИЗ СМЕСЕВОГО ТВЕРДОГО РАКЕТНОГО ТОПЛИВА | 2006 |
|
RU2316524C1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2013 |
|
RU2548611C2 |

Предложенное изобретение относится к средствам для измерения веса сыпучих продуктов. Данное изобретение позволяет повысить точность дозирования, а также обеспечить удобство его эксплуатации. Весовой дозатор порошка состоит из питателя, грузоприемного ковша, оснащенного грузоприемной тягой с площадкой для установки гири-имитатора, весоизмерителя и системы измерения и управления. При этом в состав системы измерения и управления входит электрически соединенный с весоизмерителем блок-формирователь отображаемого сигнала записи, весоизмеритель состоит из тензометрического силоизмерителя, взаимодействующего с грузоприемным ковшом посредством коромысла, на одном плече которого на шарнирной оси подвешен данный грузоприемный ковш, а на другом противовес, а гиря-имитатор взаимодействует с площадкой грузоприемной тяги посредством пневмоцилиндра. 2 з.п. ф-лы, 6 ил.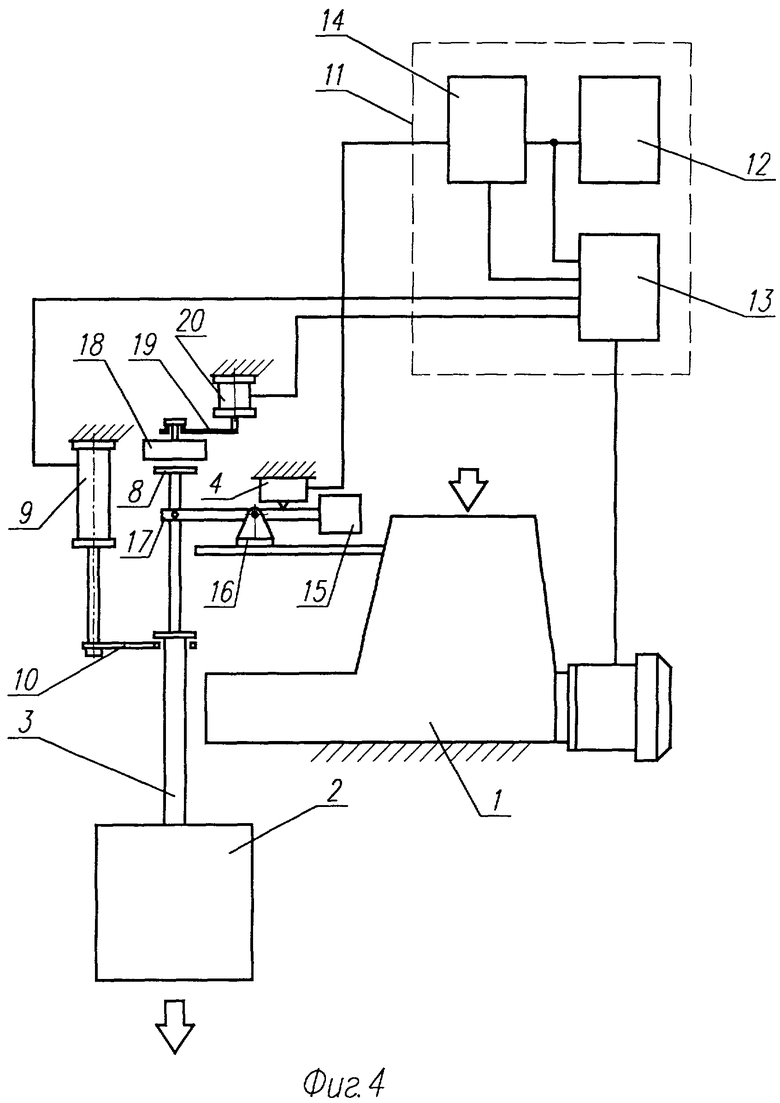
Мп=(Мд-m×n)+Мгс,
где Мп - масса противовеса;
Мд - масса дозы порошка;
Мгс - масса грузоприемной системы;
m - масштаб записи на диаграмме самопишущего прибора;
n - число делений шкалы прибора в рабочем диапазоне.
| ВЕСОВОЙ ДОЗАТОР ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 1999 |
|
RU2175757C2 |
| Прибор для дозировки и перемешивания быстро отвердевающих масс | 1931 |
|
SU25084A1 |
| Весовой дозатор | 1981 |
|
SU1049750A1 |
| Способ весового порционного дозирования и устройство для его осуществления | 1990 |
|
SU1755058A1 |
| ВЕСОВОЙ ДОЗАТОР СЫПУЧИХ МАТЕРИАЛОВ | 2001 |
|
RU2223468C2 |
| 0 |
|
SU155633A1 | |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТЧИКОВ ДЛЯ НАРЕЗКИ АНКЕРНЫХ ОТВЕРСТИЙ В ПАРОВОЗНЫХ КОТЛАХ | 1924 |
|
SU3824A1 |
| Способ обработки избыточного активного ила и осадка первичных отстойников | 1982 |
|
SU1320177A1 |
| Способ получения @ -лизина | 1983 |
|
SU1139753A1 |

