Изобретение относится к программно-аппаратному комплексу, обеспечивающему возможность одновременного обучения машиниста-оператора управлению беспилотным подвижным составом и осуществления машинистом-оператором управления реальным беспилотным подвижным составом, и может быть применено в транспортной промышленности.
В качестве прототипа выбран тренажер машиниста подвижного состава, содержащий пульт управления с органами управления и средством отображения информации о системах беспилотного подвижного состава, средство отображения путевой обстановки и вычислительное устройство, содержащее блок моделирования и выполненное с возможностью обработки сигналов от органов управления и отправки их на блок моделирования, а также с возможностью отправки сигналов от этого блока на средство отображения информации о системах беспилотного подвижного состава и средство отображения путевой обстановки [RU98621U1, дата публикации: 20.10.2010 г., МПК: G09B 9/02].
Недостатком прототипа являются ограниченные функциональные возможности тренажера машиниста тягового подвижного состава, которые заключаются в тренировках машиниста только на обучающих сценариях по управлению подвижным составом в пределах тренировочного класса, при этом для оттачивания приобретенных навыков управления подвижным составом от машиниста требуется перемещение в настоящий подвижной состав и продолжение обучения уже на нем.
Вследствие этого методика тренировки машиниста с использованием известного тренажера, не только не обеспечивает непрерывность процесса его обучения, исключая возможность мгновенного перехода от управления смоделированным в учебном классе подвижным составом к управлению реальным подвижным составом, делая процесс обучения менее эффективным, но и не позволяет сохранять данные о действиях обучаемого машиниста в процессе его обучения на реальном подвижном составе, исключая возможность проведения какой-либо аналитики его действий со стороны инструктора. Также методика обучения с использованием известного тренажера затрудняет или делает невозможным своевременное вмешательство инструктора для предотвращения опасных ситуаций, которые могут произойти в процессе управления обучаемым машинистом реальным подвижным составом.
Технический прогресс в области железнодорожного транспорта не стоит на месте, а на железной дороге появляются беспилотные подвижные составы, управление и контроль за которыми может осуществляться машинистом-оператором удаленно. Ввиду этого, предлагается устранить представленный недостаток таким многофункциональным тренажером, который с учетом известной технологии удаленного управления и контроля беспилотных подвижных составов машинистом-оператором, был бы связан с одним или сразу с несколькими из них и обеспечивал бы не только возможность моделирования обучающих сценариев по управлению ими, но и мог в дальнейшем выступать в качестве рабочего места машиниста-оператора, позволяя обучаемому машинисту сразу после прохождения обучающего сценария взять на себя операционное управление одним или, что еще лучше, несколькими беспилотными подвижными составами, тем самым не только позволяя собирать данные о его действиях в процессе обучения на реальном беспилотном подвижном составе, но и обеспечивая возможность управления беспилотным подвижным составом с того же рабочего места, на котором машинист оператор проходил обучение.
Такое устройство не только бы расширило функциональные возможности известного тренажера машиниста подвижного состава и существенным образом повысило эффективность обучения машиниста-оператора, но и позволило бы осуществлять его периодическое переобучение непосредственно с того рабочего места, которое используется этим машинистом-оператором для удаленного управления беспилотным подвижным составом.
Техническая проблема, на решение которой направлено изобретение, заключается в необходимости расширения функциональных возможностей рабочего места машиниста-оператора по управлению беспилотным подвижным составом.
Технический результат, на достижение которого направлено изобретение, заключается в обеспечении возможности тренировки машиниста-оператора на смоделированных обучающих сценариях по управлению беспилотным подвижным составом и/или удаленного управления машинистом-оператором беспилотным подвижным составом посредством рабочего места-тренажера машиниста-оператора беспилотного подвижного состава.
Дополнительный технический результат, на достижение которого направлено изобретение, заключается в обеспечении непрерывного процесса обучения машиниста-оператора управлению беспилотным подвижным составом на смоделированных обучающих сценариях по управлению беспилотным подвижным составом или на реальных беспилотных подвижных составах посредством рабочего места-тренажера машиниста-оператора беспилотного подвижного состава.
Дополнительный технический результат, на достижение которого направлено изобретение, заключается в обеспечении возможности сбора и хранения данных, полученных в процессе тренировки машиниста-оператора на его рабочем месте в тренажере и/или осуществления им профессиональной деятельности по управлению беспилотным подвижном составом.
Дополнительный технический результат, на достижение которого направлено изобретение, заключается в обеспечении соответствия пульта управления рабочего места-тренажера машиниста-оператора пульту управления на рабочем месте в кабине управления беспилотным подвижным составом.
Дополнительный технический результат, на достижение которого направлено изобретение, заключается в улучшении рабочего места-тренажера машиниста-оператора за счет возможности контроля и управления одним или более единицами беспилотного подвижного состава посредством одного рабочего места-тренажера машиниста-оператора беспилотного подвижного состава.
Сущность изобретения заключается в следующем.
Рабочее место-тренажер машиниста-оператора беспилотного подвижного состава содержит подключенные к вычислительному устройству пульт управления с органами управления и средство отображения путевой обстановки. В отличие от прототипа рабочее место-тренажер машиниста-оператора беспилотного подвижного состава дополнительно содержит подключенное к вычислительному устройству средство отображения информации о системах беспилотного подвижного состава и при этом вычислительное устройство содержит блок моделирования, выполненный с возможностью моделирования процесса контроля беспилотного подвижного состава, а вычислительное устройство выполнено с возможностью обработки сигналов от органов управления и отправки их на блок моделирования, а также с возможностью отправки сигналов от этого блока на средство отображения информации о системах беспилотного подвижного состава и средство отображения путевой обстановки, и/или рабочее место-тренажер машиниста-оператора беспилотного подвижного состава содержит подключенные к вычислительному устройству интерфейс связи с беспилотным подвижным составом, выполненный с возможностью беспроводного подключения к беспилотному подвижному составу, при этом вычислительное устройство дополнительно содержит блок дистанционного контроля и управления беспилотным подвижным составом, выполненный с возможностью приема и отправки сигналов от интерфейса беспроводной связи на средство отображения информации о системах беспилотного подвижного состава и средство отображения путевой обстановки, и выполненный с возможностью обработки сигналов от органов управления и отправки их на беспилотный подвижной состав через интерфейс связи с беспилотным подвижным составом.
Пульт управления может быть представлен столом или корпусом и обеспечивает возможность размещения органов управления. Органы управления обеспечивают возможность формирования сигналов управления беспилотным ПС и сигналов управления рабочим местом-тренажером машиниста-оператора беспилотного ПС и отправки этих сигналов на вычислительное устройство. Органы управления подключены к вычислительному устройству через пульт управления. Органы управления могут быть представлены контроллерами, кнопками и педалями.
Органы управления могут включать в себя контроллеры для управления тягой и торможением, кнопки без фиксации для управления дверьми, стояночным пружинным тормозом, токоприемником, шунтированием стоп-крана и другими устройствами, кнопку с фиксацией для аварийной остановки поезда, а также кнопки без фиксации для переключения между беспилотными ПС, входа в режим управления беспилотным ПС и выхода из него.
Органы управления могут быть снабжены контрольными устройствами, обеспечивающими получение и отправку на вычислительное устройство данных о задействовании машинистом-оператором тех или иных органов управления. Контрольные устройства могут быть представлены датчиками и/или электронными измерительными приборами, например, датчиками угла поворота и др.
Органы управления могут быть снабжены элементами индикации их состояния, обеспечивающими возможность определения машинистом-оператором состояния органов управления, в котором они находились или в которое они были приведены в процессе его взаимодействия с ними для управления разными беспилотным ПС.
Элементы индикации могут быть представлены в виде подсветки органов управления, выполненной с возможностью изменения ее яркости или цвета в зависимости от состояния органов управления, изменяющегося при их задействовании и при переключении машинистом-оператором между разными беспилотными ПС.
Средство отображения информации о системах беспилотного ПС подключено к вычислительному устройству. Средство отображения информации о системах беспилотного ПС может быть выполнено в виде одного или нескольких мониторов, которые могут быть выполнены сенсорными. Преимущественно средство отображения информации о системах беспилотного ПС размещено на пульте управления.
Средство отображения путевой обстановки подключено к вычислительному устройству. Средство отображения путевой обстановки может быть выполнено в виде одного или нескольких широкоформатных мониторов, проекторов или проекционных экранов. При этом для обеспечения соответствия места-тренажера машиниста-оператора кабине беспилотного ПС, средство отображения путевой обстановки может быть позиционировано на верхнем по отношению к средству отображения информации о системах беспилотного ПС уровне рабочего места-тренажера машиниста-оператора беспилотного ПС.
Рабочее место-тренажер машиниста-оператора беспилотного ПС может быть дополнительно снабжено креслом машиниста-оператора. Кресло машиниста-оператора может быть выполнено с возможностью изменения его высоты и расстояния до пульта управления, обеспечивая возможность регулировки обзорности рабочего места машиниста-оператора и улучшая таким образом эргономические свойства рабочего места-тренажера машиниста-оператора.
Кресло машиниста-оператора может содержать дублирующие органы управления, что обеспечивает возможность управления смоделированным или реальным беспилотным ПС посредством кресла машиниста оператора, а также исключает необходимость изменения машинистом-оператором своего положения относительно пульта управления, улучшая таким образом эргономические свойства рабочего места-тренажера машиниста-оператора.
Дублирующие органы управления имеют тот же функционал, что и органы управления, и могут иметь аналогичную им конструкцию. Дублирующие органы управления могут быть установлены на подлокотниках кресла машиниста-оператора беспилотного ПС, что также исключает необходимость изменения машинистом-оператором своего положения относительно пульта управления в процессе управления смоделированным или реальным беспилотным ПС. Также дублирующие органы управления могут быть выполнены в виде модулей, присоединяемых к подлокотникам кресла машиниста-оператора беспилотного ПС с возможностью их демонтажа и перемещения на другой подлокотник, для обеспечения удобства их использования, как машинистом с преобладающей правой, так и машинистом с преобладающей левой рукой.
Дублирующие органы управления также могут быть снабжены контрольными устройствами, обеспечивающими получение и отправку на вычислительное устройство данных о задействовании машинистом-оператором тех или иных органов управления, и могут быть снабжены элементами индикации, обеспечивающими возможность определения машинистом-оператором состояния органов управления, в котором они находились или в которое они были приведены в процессе взаимодействия с ними машиниста-оператора в процессе управления разными беспилотными ПС.
Интерфейс связи с беспилотным ПС, обеспечивает беспроводное подключение к беспилотному ПС по каналу связи и обмен данными с беспилотным ПС по этому каналу связи. Интерфейс связи с беспилотным ПС, может быть выполнен с возможностью одновременного беспроводного подключения не менее чем к одному беспилотному ПС по отдельным каналам связи и обмена данными с этими беспилотными ПС. Данные, получаемые интерфейсом связи от каждого беспилотного ПС, могут включать видеоизображения путевой обстановки и обстановки внутри вагонов реальных беспилотных ПС с камер, установленных на каждом из них, и могут включать информацию о системах каждого из реальных подконтрольных беспилотных ПС. Данные, получаемые интерфейсом связи от вычислительного устройства, могут содержать управляющие сигналы. Интерфейс беспроводной связи с беспилотным ПС подключен к вычислительному устройству и выполнен с возможностью приема сигналов от вычислительного устройства и отправки сигналов на него. Интерфейс беспроводной связи может быть представлен модемом, в том числе спутниковым.
Вычислительное устройство обеспечивает возможность управления беспилотным ПС в процессе тренировки машинистом-оператором на смоделированном по обучающему сценарию беспилотном ПС и содержит для этого блок моделирования. Блок моделирования выполнен с возможностью моделирования процесса контроля беспилотного подвижного состава и обеспечивает моделирование обучающего сценария, который может включать в себя параметры поездки, а также количество и характер нештатных ситуаций, возникающих в процессе данной поездки. Параметры поездки могут включать в себя путевую обстановку, обстановку внутри вагонов смоделированного беспилотного ПС и информацию о системах смоделированного беспилотного ПС. Блок моделирования так же может быть выполнен с возможностью одновременного моделирования параметров не менее чем двух поездок, совершаемых беспилотными ПС. При этом вычислительное устройство может быть выполнено с возможностью переключения между параметрами этих поездок, и отправки результатов моделирования одной из них в виде сигналов, на средства отображения путевой обстановки и средства отображения информации о беспилотном ПС, обеспечивая тем самым возможность моделирования процесса одновременного контроля не менее чем двух беспилотных ПС. Управление беспилотным ПС в процессе тренировки машинистом-оператором на смоделированном по обучающему сценарию беспилотном ПС может обеспечиваться за счет обработки процессором вычислительного устройства как сигналов, поступающих от органов управления, так и сигналов, поступающих от дублирующих органов управления, и формирования управляющих воздействий для отправки их на блок моделирования.
Также вычислительное устройство обеспечивает возможность управления машинистом-оператором беспилотным ПС в процессе тренировки на реальном беспилотном ПС и содержит для этого блок дистанционного контроля и управления беспилотным ПС. Блок дистанционного контроля и управления беспилотным ПС выполнен с возможностью приема сигналов с данными, получаемыми интерфейсом беспроводной связи, и отправки этих данных в виде сигналов на средство отображения информации о системах беспилотного ПС и средство отображения путевой обстановки. Также блок дистанционного контроля и управления беспилотным ПС может быть выполнен с возможностью переключения между данными, получаемыми интерфейсом беспроводной связи, обеспечивая тем самым, возможность одновременного контроля машинистом-оператором не менее чем двух реальных беспилотных ПС. Управление беспилотным ПС в процессе тренировки машинистом-оператором на реальном беспилотном ПС может быть реализовано за счет обработки блоком дистанционного контроля и управления сигналов, поступающих от органов управления и дублирующих органов управления и формирования управляющих воздействий для оправки их на беспилотный ПС через интерфейс связи с беспилотным ПС.
Также вычислительное устройство может быть выполнено с возможностью хранения данных, сбор которых обеспечивается контрольными устройствами в процессе тренировки машиниста-оператора на смоделированном и реальном беспилотном ПС, и отправки этих данных инструктору, для дальнейшей оценки успешности прохождения машинистом-оператором обучающего сценария и проведения аналитики действий, совершаемых им в процессе тренировки на реальном беспилотном ПС.
Вычислительное устройство может быть выполнено в виде микропроцессорного контроллера с предустановленным в его памяти программным обеспечением или в виде промышленного компьютера. Блок моделирования и блок дистанционного контроля и управления беспилотным ПС могут быть представлены в виде логических функциональных блоков, интегрированных в вычислительное устройство. Также вычислительное устройство может содержать базы данных, используемые микропроцессорным контроллером для хранения в них программного обеспечения и обучающих сценариев.
Изобретение может быть выполнено из известных материалов с помощью известных средств, что свидетельствует о его соответствии критерию патентоспособности «промышленная применимость».
Изобретение характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, отличающейся тем, что:
- рабочее место-тренажер машиниста-оператора беспилотного подвижного состава дополнительно содержит подключенное к вычислительному устройству средство отображения информации о системах беспилотного подвижного состава вычислительное устройство содержит блок моделирования, выполненный с возможностью моделирования процесса контроля беспилотного подвижного состава, а вычислительное устройство выполнено с возможностью обработки сигналов от органов управления и отправки их на блок моделирования, а также с возможностью отправки сигналов от этого блока на средство отображения информации о системах беспилотного подвижного состава и средство отображения путевой обстановки
- рабочее место-тренажер машиниста-оператора беспилотного подвижного состава содержит подключенный к вычислительному устройству интерфейс связи с беспилотным подвижным составом, выполненный с возможностью беспроводного подключения к беспилотному подвижному составу, при этом вычислительное устройство дополнительно содержит блок дистанционного контроля и управления беспилотным подвижным составом, выполненный с возможностью приема и отправки сигналов от интерфейса беспроводной связи на средство отображения информации о системах беспилотного подвижного состава и средство отображения путевой обстановки, и выполненный с возможностью обработки сигналов от органов управления и отправки их на беспилотный подвижной состав через интерфейс связи с беспилотным подвижным составом.
Совокупность существенных признаков изобретения обеспечивает возможность обучения машиниста-оператора управлению беспилотным подвижным составом, за счет выполнения им тренировки сначала на смоделированном беспилотном ПС, а затем и выполнения им тренировки на реальном беспилотном ПС, посредством одного рабочего места-тренажера машиниста-оператора беспилотного ПС, а также обеспечивает возможность удаленного управления машинистом-оператором беспилотным ПС посредством подключения к вычислительному устройству интерфейса связи с беспилотным ПС, выполненного с возможностью беспроводного подключения к беспилотному ПС.
Благодаря этому обеспечивается достижение технического результата, заключающегося в обеспечении возможности тренировки машиниста-оператора на смоделированных обучающих сценариях по управлению беспилотным подвижным составом и/или удаленного управления машинистом-оператором беспилотным подвижным составом посредством рабочего места-тренажера машиниста-оператора беспилотного подвижного состава.
Изобретение обладает ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о его соответствии критерию патентоспособности «новизна».
Из уровня техники известен тренажер машиниста ПС, обеспечивающий возможность тренировки машиниста-оператора на смоделированном ПС.
Однако из уровня техники не известно многофункциональное рабочее место-тренажер машиниста-оператора беспилотного подвижного состава, обеспечивающее возможность тренировки машиниста-оператора как на смоделированном, так и на реальном беспилотном ПС. Представленное техническое решение обеспечивает уникальную методику тренировки обучаемого машиниста сразу после прохождения обучающего сценария, позволяя взять на себя операционное управление и контроль одним или несколькими беспилотными подвижными составами, тем самым не только позволяя собирать данные о действиях обучаемого машиниста-оператора в процессе тренировки на реальном беспилотном подвижном составе, но и обеспечивая возможность управления беспилотным подвижным составом с того же рабочего места, на котором машинист-оператор проходил обучение.
Ввиду этого изобретение соответствует критерию патентоспособности «изобретательский уровень».
Изобретение поясняется следующими фигурами.
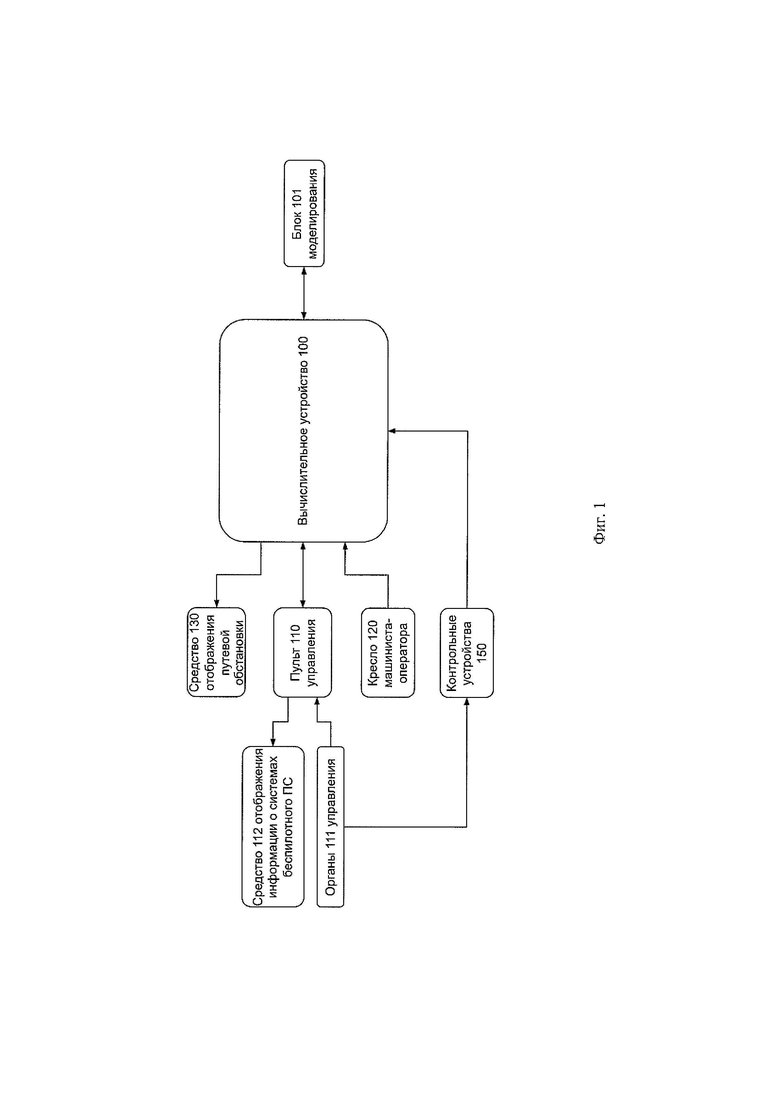
Фиг. 1 - Функциональная схема рабочего места-тренажера машиниста-оператора беспилотного ПС, обеспечивающего возможность тренировки машиниста-оператора на смоделированных обучающих сценариях по управлению беспилотным ПС.
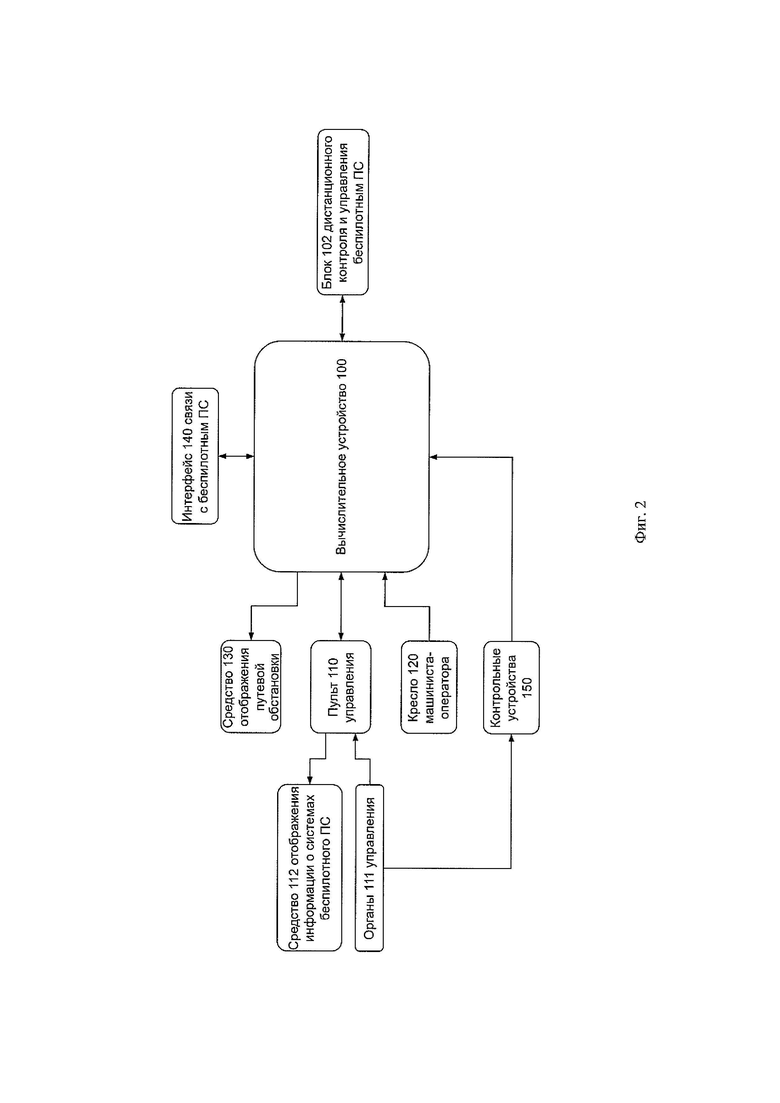
Фиг. 2 - Функциональная схема рабочего места-тренажера машиниста-оператора беспилотного ПС, обеспечивающего возможность удаленного управления машинистом-оператором беспилотным ПС.
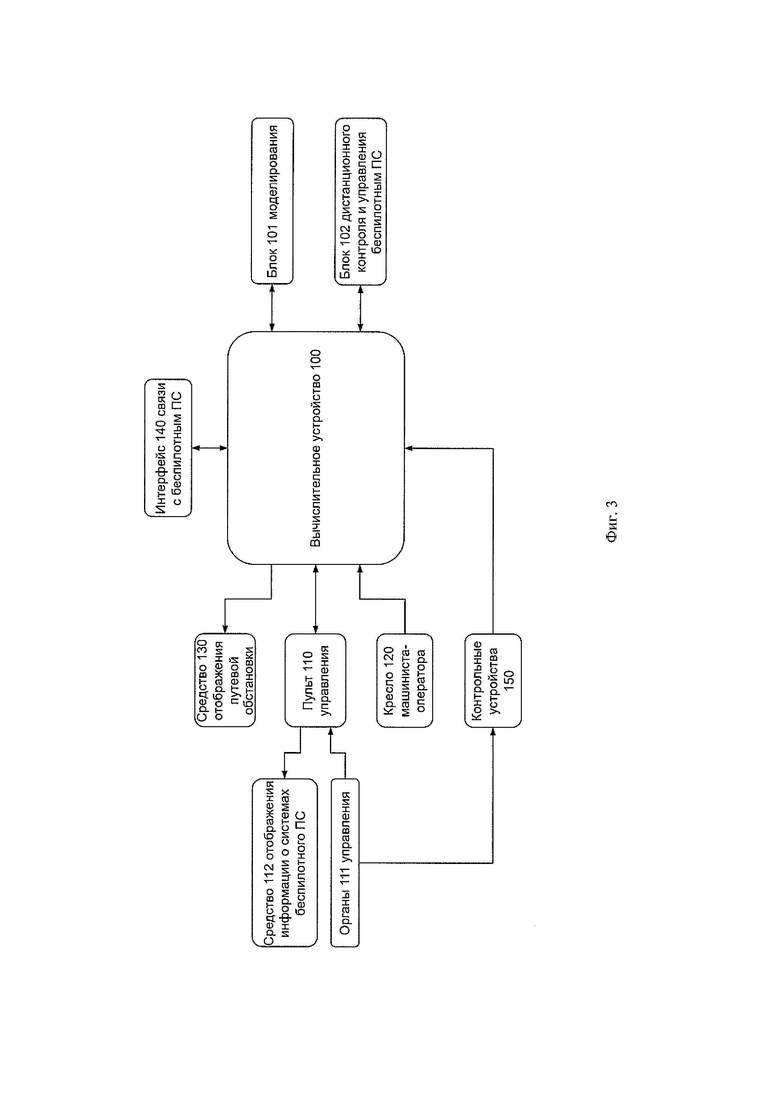
Фиг. 3 - Функциональная схема рабочего места-тренажера машиниста-оператора беспилотного ПС, обеспечивающего возможность тренировки машиниста-оператора на смоделированных обучающих сценариях по управлению беспилотным ПС и/или удаленного управления машинистом-оператором беспилотным ПС.
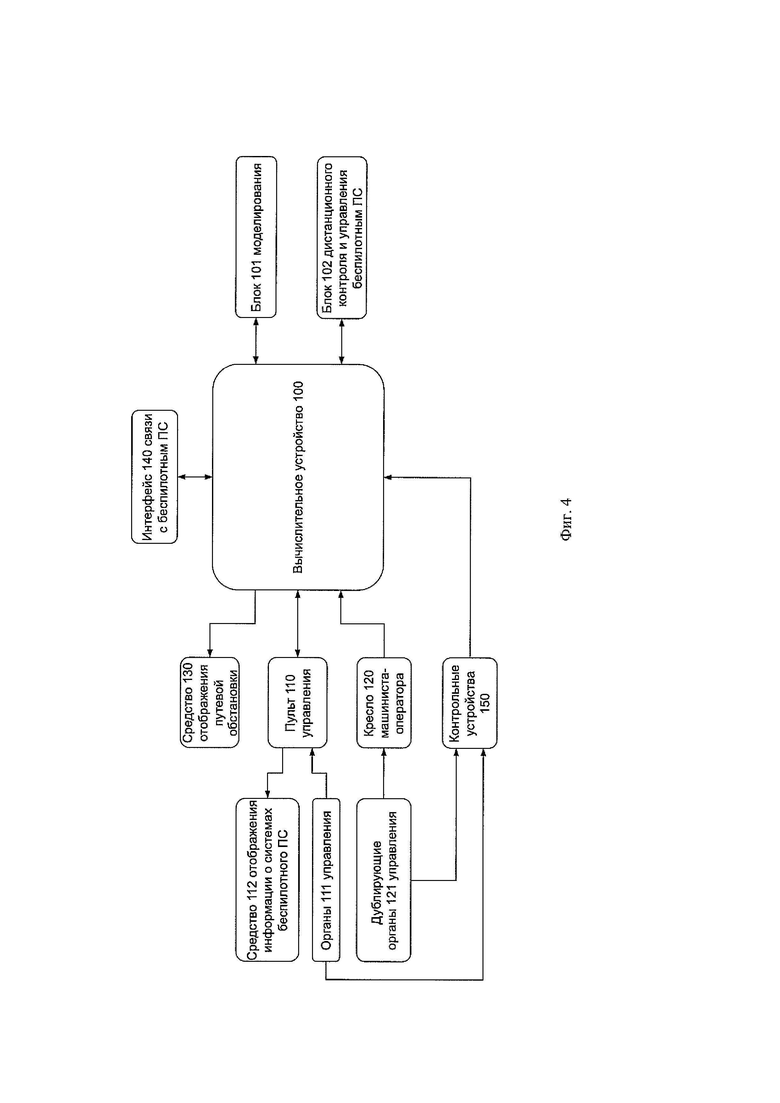
Фиг. 4 - Функциональная схема рабочего места-тренажера машиниста-оператора беспилотного ПС обеспечивающего возможность тренировки машиниста-оператора на смоделированных обучающих сценариях по управлению беспилотным ПС и/или удаленного управления машинистом-оператором беспилотным ПС, при этом кресло машиниста-оператора, дополнительно снабжено дублирующими органами управления.
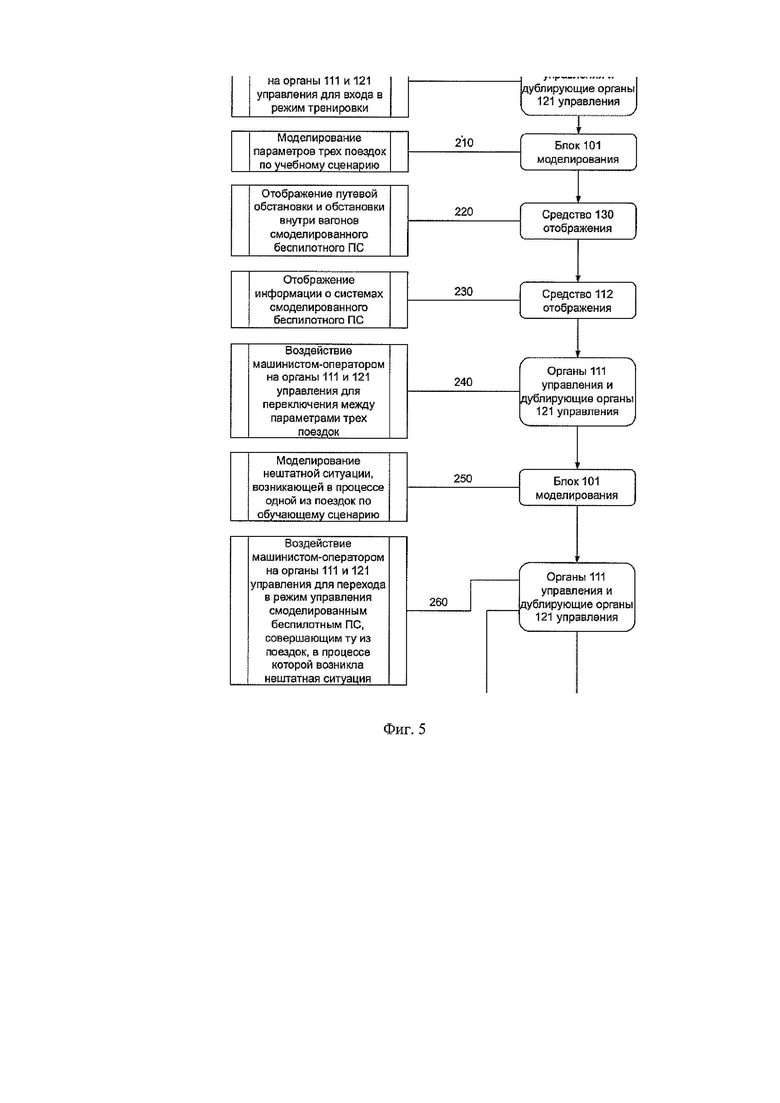
Фиг. 5 - Блок-схема, описывающая функционирование рабочего места-тренажера машиниста-оператора беспилотного ПС в процессе тренировки на смоделированном беспилотном ПС.
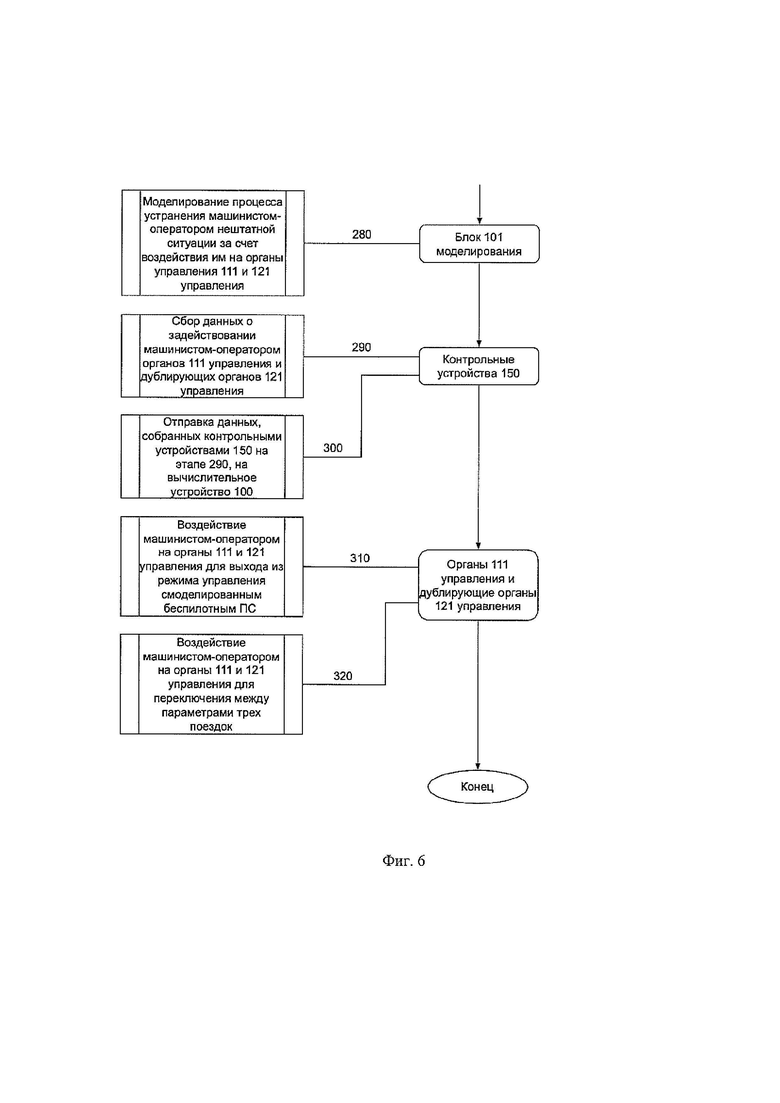
Фиг. 6 - Блок-схема, описывающая функционирование рабочего места-тренажера машиниста-оператора беспилотного ПС в процессе тренировки на смоделированном беспилотном ПС (продолжение).
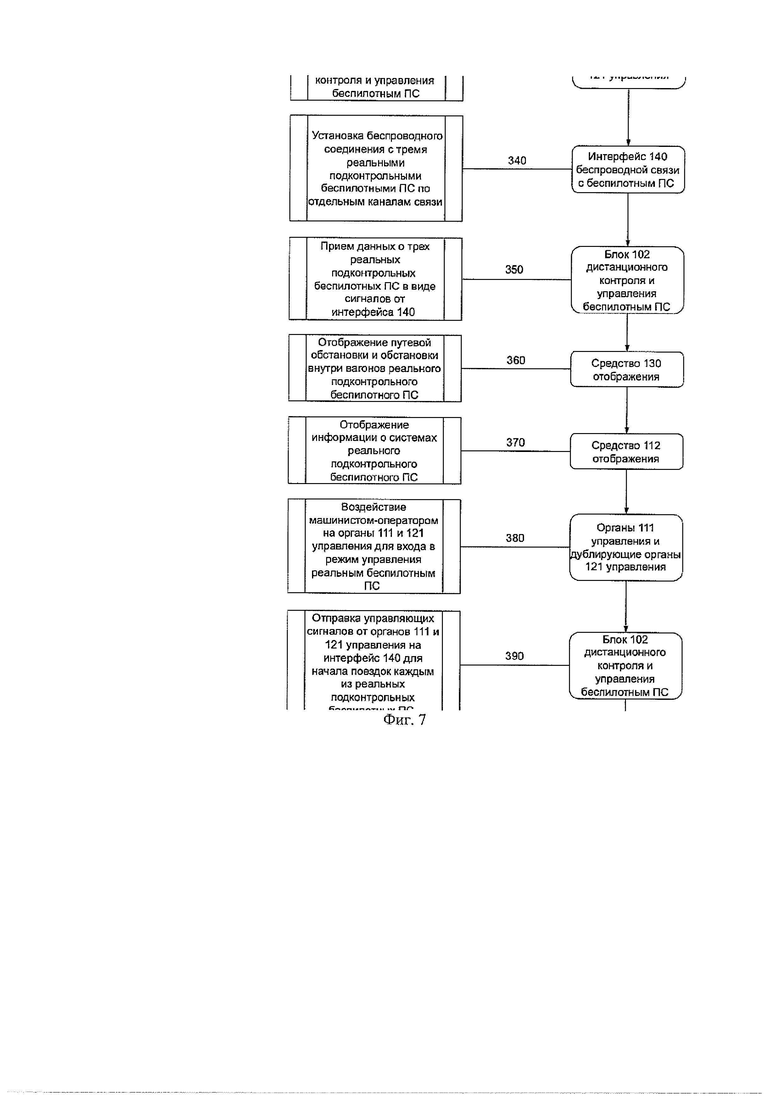
Фиг. 7 - Блок-схема, описывающая функционирование рабочего места-тренажера машиниста-оператора беспилотного ПС в процессе тренировки на реальном беспилотном ПС.
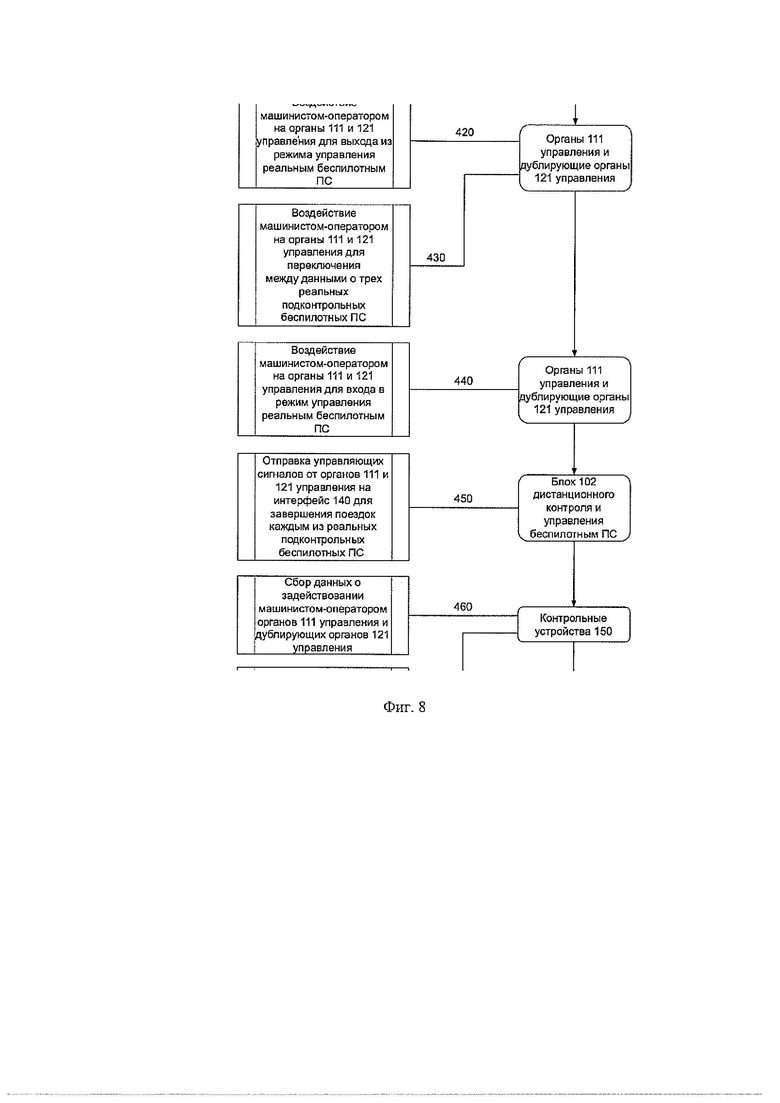
Фиг. 8 - Блок-схема, описывающая функционирование рабочего места-тренажера машиниста-оператора беспилотного ПС в процессе тренировки на реальном беспилотном ПС (продолжение).
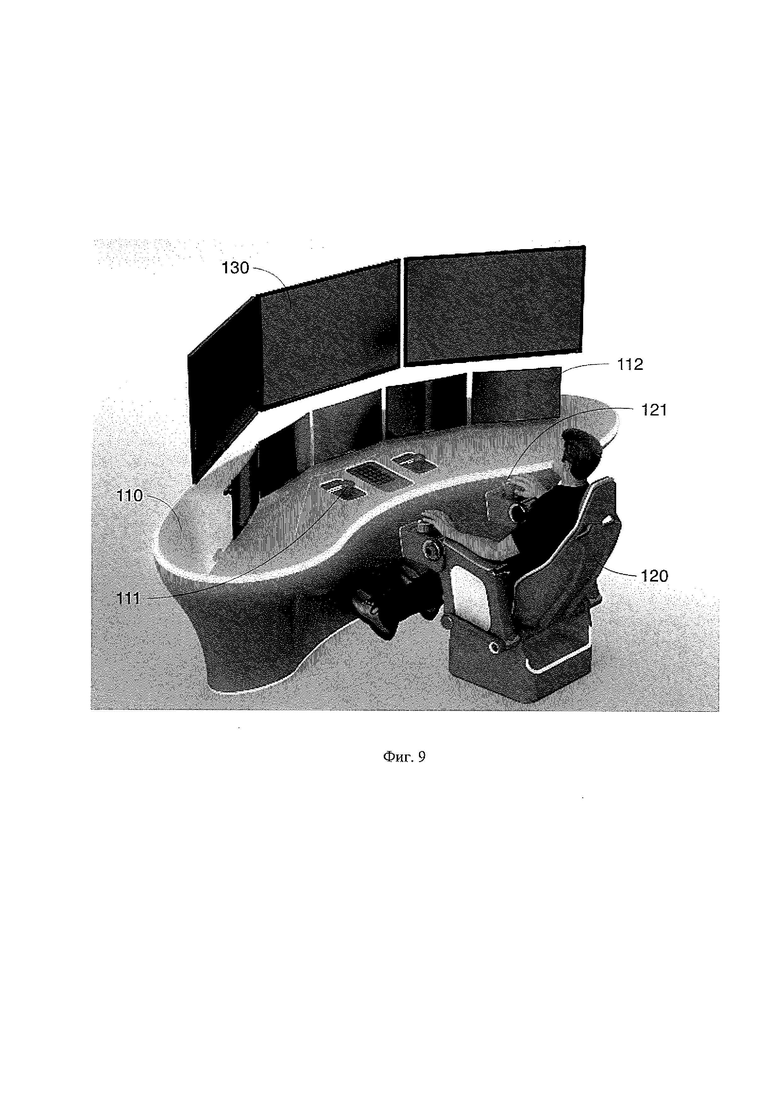
Фиг. 9 - Рабочее место-тренажер машиниста-оператора беспилотного ПС, общий вид.
Для иллюстрации возможности реализации и более полного понимания сути изобретения ниже представлен вариант его осуществления, который может быть любым образом изменен или дополнен, при этом настоящее изобретение ни в коем случае не ограничивается представленным вариантом.
Рабочее место-тренажер машиниста-оператора беспилотного ПС содержит: Вычислительное устройство 100, содержащее центральный процессор и в варианте осуществления, изображенном на Фиг. 1 и Фиг. 3-4, снабженное блоком 101 моделирования, а в варианте осуществления изображенном на Фиг. 2 и Фиг. 3-4 блоком 102 дистанционного контроля и управления беспилотным ПС; пульт ПО управления содержит органы 111 управления и средство 112 отображения информации о системах беспилотного ПС, представленное сенсорными мониторами в количестве пяти штук; кресло 120 машиниста-оператора, в варианте осуществления, изображенном на Фиг. 4, снабженное дублирующими органами 121 управления, установленными в подлокотниках; средство 130 отображения путевой обстановки, представленное широкоформатными мониторами, установленными выше уровня сенсорных мониторов, и снабженные встроенными громкоговорителями; интерфейс 140 беспроводной связи с беспилотным ПС, представленный LTE-модемом; контрольные устройства 150, представленные датчиками задействования органов управления.
Органы 111 управления и дублирующие органы 121 управления снабжены средствами индикации их состояния, представленными подсветкой органов управления, выполненной с возможностью изменения яркости.
Пульт ПО управления, кресло 120 машиниста-оператора, средство 130 отображения путевой обстановки, интерфейс 140 беспроводной связи с беспилотным ПС и контрольные устройства 150 подключены к вычислительному устройству 100.
Блок 101 моделирования и блок 102 дистанционного контроля и управления беспилотным ПС подключены к вычислительному устройству 100.
Органы 111 управления и средство 112 отображения информации о системах беспилотного ПС подключены к пульту 110 управления.
Дублирующие органы 121 управления подключены к креслу 120 машиниста-оператора.
Органы 111 управления и дублирующие органы 121 управления подключены к контрольным устройствам 150.
Изобретение работает следующим образом.
Процесс обучения машиниста-оператора управлению беспилотным ПС, начинается с тренировки на смоделированном беспилотном ПС. Тренировка реализуется рядом основных этапов, которые представлены блок-схемами на Фиг. 2-3, и включает:
Этап 200, на котором машинистом-оператором с его рабочего места осуществляется воздействие на органы 111 управления и дублирующие органы 121 управления и отправка ими управляющих сигналов на вычислительное устройство 100 для входа в режим тренировки и последующего выбора обучающего сценария. Выбор обучающего сценария может быть осуществлен инструктором заранее с его удаленного рабочего места, выполненного с возможностью связи с вычислительным устройством 100, или непосредственно при взаимодействии инструктора с органами 111 и 121 управления с рабочего места машиниста-оператора. Обучающий сценарий включает в себя параметры поездок, а также количество и характер нештатных ситуаций, возникающих в процессе данных поездок. Параметры каждой из поездок включают в себя путевую обстановку, обстановку внутри вагонов смоделированного беспилотного ПС и информацию о функционировании систем смоделированного беспилотного ПС.
Этап 210, на котором блоком 101 моделирования осуществляется моделирование параметров трех поездок по обучающему сценарию и отправка результатов моделирования в виде сигналов на средство 130 отображения путевой обстановки и средство 112 отображения информации о системах беспилотного ПС.
Этап 220, на котором средством 130 отображения путевой обстановки осуществляется прием параметров поездки, в виде сигналов от блока 101, и отображение путевой обстановки и обстановки внутри вагонов смоделированного беспилотного ПС.
Этап 230, на котором средством 112 отображения информации о системах беспилотного ПС осуществляется прием параметров поездки, в виде сигналов от блока 101, и отображение информации о системах смоделированного беспилотного ПС.
Этап 240, на котором машинистом-оператором с его рабочего места осуществляется воздействие на органы 111 управления и дублирующие органы 121 управления и отправка ими управляющих сигналов на блок 101 моделирования для переключения между параметрами трех поездок, моделируемых этим блоком, за счет чего реализуется режим одновременного контроля машинистом-оператором трех смоделированных беспилотных ПС.
Этап 250, на котором блоком 101 осуществляется моделирование нештатной ситуации, возникающей в процессе одной из поездок по обучающему сценарию.
Этапы 260 и 270, на которых машинистом-оператором с его рабочего места осуществляется воздействие на органы 111 управления и дублирующие органы 121 управления и отправка управляющих сигналов на блок 101, для перехода в режим управления смоделированным беспилотным ПС, совершающим ту из поездок, в процессе которой возникла нештатная ситуация, и устранения возникшей нештатной ситуации.
Этап 280, на котором блоком 101 моделирования осуществляется прием управляющих сигналов от органов 111 управления и дублирующих органов 121 управления и моделирование на основе этих сигналов процесса устранения машинистом-оператором нештатной ситуации за счет воздействия им на органы 111 и 121 управления.
Этапы 290 и 300, на которых контрольными устройствами 150 осуществляется сбор данных о задействовании машинистом-оператором органов 111 управления и дублирующих органов 121 управления, и отправка этих данных на вычислительное устройство 100.
Этапы 310 и 320, на которых машинистом-оператором с его рабочего места осуществляется воздействие на органы 111 управления и дублирующие органы 121 управления и отправка управляющих сигналов на блок 101, для выхода из режима управления смоделированным беспилотным ПС и переключения между параметрами трех поездок, моделируемых этим блоком, и перехода, таким образом, в режим одновременного контроля машинистом-оператором трех смоделированных беспилотных ПС.
На протяжении всего процесса тренировки на смоделированном беспилотном ПС, органами 111 управления и органами 121 управления осуществляется индикация их состояния при помощи средств индикации, выполненных в виде подсветки, яркость которой изменяется с минимальной на максимальную в случае задействования машинистом-оператором того или иного органа управления в режиме управления смоделированным беспилотным ПС, а также изменяется с максимальной на минимальную при переключении на параметры той из поездок, в процессе которой данный орган управления не был задействован, и остается на прежнем уровне при переключении на параметры той из поездок, в процессе которой данный орган управления был так же задействован.
Для завершения тренировки на смоделированном беспилотном ПС обучающим сценарием предусмотрено завершение всех трех поездок, совершаемых смоделированными беспилотными ПС, и отправка вычислительным устройством 100 данных, собранных контрольными устройствами 150, на рабочее место или электронное устройство инструктора для дальнейшей оценки им успешности прохождения машинистом-оператором обучающего сценария.
После завершения тренировки на смоделированном беспилотном ПС процесс обучения машиниста-оператора продолжается, и он выполняет тренировку или пробную поездку на реальном беспилотном ПС. Тренировка или пробная поездка реализуется рядом основных этапов, которые представлены блок-схемами на Фиг. 4-5, и включает:
Этап 330, на котором машинистом-оператором с его рабочего места осуществляется воздействие на органы 111 управления и дублирующие органы 121 управления и последующая отправка ими управляющих сигналов на вычислительное устройство 100 для входа в режим дистанционного контроля и управления реальным беспилотным ПС и выбора подконтрольных беспилотных ПС.
Этап 340, на котором интерфейсом 140 беспроводной связи с беспилотным ПС осуществляется установка беспроводного соединения с тремя реальными подконтрольными беспилотными ПС по отдельным каналам связи.
Этап 350, на котором блоком 102 дистанционного контроля и управления беспилотным ПС осуществляется прием данных о трех реальных подконтрольных беспилотных ПС, в виде сигналов от интерфейса 140, и отправка этих данных на средство 130 отображения путевой обстановки и средство 112 отображения информации о системах беспилотного ПС. Принимаемые данные содержат видеоизображения путевой обстановки и обстановки внутри вагонов реальных подконтрольных беспилотных ПС с камер, установленных на каждом из них, и содержат информацию о системах каждого из реальных подконтрольных беспилотных ПС.
Этап 360, на котором средством 130 отображения путевой обстановки осуществляется прием данных об одном из реальных подконтрольных беспилотных ПС, в виде сигналов от блока 102, и отображение видеоизображения путевой обстановки и обстановки внутри вагонов реального подконтрольного беспилотного ПС.
Этап 370, на котором средством 112 отображения информации о системах беспилотного ПС осуществляется прием данных об одном из реальных подконтрольных беспилотных ПС, в виде сигналов от блока 102, и отображение информации о системах реального подконтрольного беспилотного ПС.
Этап 380, на котором машинистом-оператором с его рабочего места осуществляется воздействие на органы 111 управления и дублирующие органы 121 управления и отправка ими управляющих сигналов на блок 102 дистанционного контроля и управления для входа в режим управления реальным беспилотным ПС и для начала поездок каждым из реальных подконтрольных беспилотных ПС.
Этап 390, на котором блоком 102 дистанционного контроля и управления беспилотным ПС осуществляется прием управляющих сигналов от органов 111 управления и дублирующих органов 121 управления и отправка этих сигналов на интерфейс 140 беспроводной связи с беспилотным ПС, для начала поездок каждым из реальных подконтрольных беспилотных ПС.
Этапы 400 и 410, на которых контрольными устройствами 150 осуществляется сбор данных о задействовании машинистом-оператором органов 111 управления и дублирующих органов 121 управления, и отправка этих данных на вычислительное устройство 100.
Этапы 420 и 430, на которых машинистом-оператором с его рабочего места осуществляется воздействие на органы III управления и дублирующие органы 121 управления и отправка ими управляющих сигналов на блок 102 для выхода из режима управления реальным беспилотным ПС и переключения между данными о трех реальных подконтрольных беспилотных ПС, за счет чего реализуется режим одновременного контроля машинистом-оператором трех реальных беспилотных ПС.
Этап 440, на котором машинистом-оператором с его рабочего места осуществляется воздействие на органы 111 управления и дублирующие органы 121 управления и отправка ими управляющих сигналов на блок 102 дистанционного контроля и управления для входа в режим управления реальным беспилотным ПС и для завершения поездок каждым из реальных подконтрольных беспилотных ПС.
Этап 450, на котором блоком 102 дистанционного контроля и управления беспилотным ПС осуществляется прием управляющих сигналов от органов 111 управления и дублирующих органов 121 управления и отправка этих сигналов на интерфейс 140 беспроводной связи с беспилотным ПС, для завершения поездок каждым из реальных подконтрольных беспилотных ПС.
Этапы 460 и 470, на которых контрольными устройствами 150 осуществляется сбор данных о задействовании машинистом-оператором органов 111 управления и дублирующих органов 121 управления, и отправка этих данных на вычислительное устройство 100.
На протяжении всего процесса тренировки на реальном беспилотном ПС, органами 111 управления и органами 121 управления так же, как и в процессе тренировки на смоделированном беспилотном ПС, осуществляется индикация их состояния при помощи средств индикации, выполненных в виде подсветки.
По завершении этапа 470 вычислительным устройством 100 осуществляется отправка данных, собранных контрольными устройствами 150, на рабочее место или электронное устройство инструктора, что обеспечивает возможность детального их изучения и проведения аналитики действий машиниста-оператора, совершаемых как в процессе прохождения обучающего сценария, так и в процессе дистанционного контроля и управления реальным беспилотным ПС.
Возможность выполнения машинистом-оператором тренировки на реальном беспилотном ПС, после завершения выполнения тренировки на смоделированном беспилотном ПС, посредством одного рабочего места, обеспечивает непрерывность процесса обучения машиниста-оператора управлению беспилотным ПС, а также в дальнейшем позволяет уже обученному машинисту-оператору осуществлять деятельность по управлению беспилотным ПС с того же места, на котором он проходил обучение.
Таким образом обеспечивается достижение технического результата, заключающегося в обеспечении возможности тренировки машиниста-оператора на смоделированных обучающих сценариях по управлению беспилотным подвижным составом и/или удаленного управления машинистом-оператором беспилотным подвижным составом посредством рабочего места-тренажера машиниста-оператора беспилотного подвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для обучения персонала самоходного снегоуборочного специального рельсового подвижного состава | 2023 |
|
RU2805578C1 |
| Система обучения персонала специального самоходного рельсового подвижного состава | 2023 |
|
RU2801838C1 |
| Система для обучения персонала специального самоходного подвижного состава | 2021 |
|
RU2771893C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР КОМАНДНОГО ПУНКТА | 2022 |
|
RU2795343C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МАШИНИСТОВ ЛОКОМОТИВА | 2010 |
|
RU2430427C1 |
| Процедурный тренажер для обучения машиниста работе с тормозной системой подвижного состава | 2022 |
|
RU2793839C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТРЕНАЖЕР МАШИНИСТА МАНЕВРОВОГО ТЕПЛОВОЗА | 2020 |
|
RU2807792C2 |
| Комплекс технических средств обучения для подготовки общевойсковых соединений в центре боевой подготовки | 2016 |
|
RU2610725C9 |
| ТРЕНАЖЕР ЭКИПАЖА ВЕРТОЛЕТА С БОРТОПЕРАТОРОМ ВНЕШНЕЙ ПОДВЕСКИ | 2005 |
|
RU2294019C1 |
| Комплексный тактический тренажер подготовки экипажа и подразделения | 2022 |
|
RU2809960C1 |
Изобретение относится к программно-аппаратному комплексу, обеспечивающему возможность обучения машиниста-оператора управлению беспилотным подвижным составом (ПС) и осуществления машинистом-оператором управления реальным беспилотным ПС. Рабочее место-тренажер машиниста-оператора беспилотного ПС содержит пульт управления с органами управления, средства отображения, интерфейс связи с беспилотным ПС, выполненный с возможностью одновременного беспроводного подключения к одному или нескольким беспилотным ПС, и вычислительное устройство, содержащее блок моделирования и блок дистанционного контроля и управления беспилотным ПС. Повышается уровень подготовки машиниста-оператора. 9 з.п. ф-лы, 9 ил.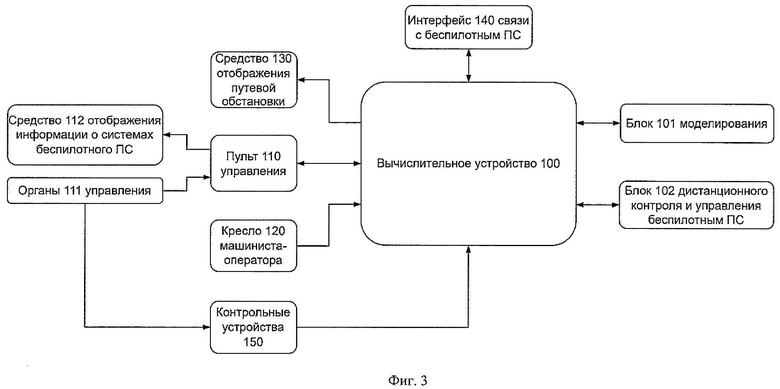
1. Рабочее место-тренажер машиниста-оператора беспилотного подвижного состава, содержащее подключенные к вычислительному устройству пульт управления c органами управления и средство отображения путевой обстановки, отличающееся тем, что рабочее место-тренажер машиниста-оператора беспилотного подвижного состава дополнительно содержит подключенное к вычислительному устройству средство отображения информации о системах беспилотного подвижного состава, и при этом вычислительное устройство содержит блок моделирования, выполненный с возможностью моделирования процесса контроля беспилотного подвижного состава, а вычислительное устройство выполнено с возможностью обработки сигналов от органов управления и отправки их на блок моделирования, а также с возможностью отправки сигналов от этого блока на средство отображения информации о системах беспилотного подвижного состава и средство отображения путевой обстановки, и/или рабочее место-тренажер машиниста-оператора беспилотного подвижного состава содержит подключенный к вычислительному устройству интерфейс связи с беспилотным подвижным составом, выполненный с возможностью беспроводного подключения к беспилотному подвижному составу, при этом вычислительное устройство дополнительно содержит блок дистанционного контроля и управления беспилотным подвижным составом, выполненный с возможностью приема и отправки сигналов от интерфейса беспроводной связи на средство отображения информации о системах беспилотного подвижного состава и средство отображения путевой обстановки и выполненный с возможностью обработки сигналов от органов управления и отправки их на беспилотный подвижной состав через интерфейс связи с беспилотным подвижным составом.
2. Рабочее место-тренажер по п.1, отличающееся тем, что средство отображения путевой обстановки позиционировано на верхнем по отношению к средству отображения информации о системах беспилотного подвижного состава уровне.
3. Рабочее место-тренажер по п.1, отличающееся тем, что снабжено креслом машиниста-оператора беспилотного подвижного состава, выполненным с возможностью изменения высоты и расстояния до пульта управления, обеспечивая возможность регулировки обзорности рабочего места машиниста-оператора.
4. Рабочее место-тренажер по п.3, отличающееся тем, что кресло машиниста-оператора беспилотного подвижного состава снабжено дублирующими органами управления.
5. Рабочее место-тренажер по п.4, отличающееся тем, что вычислительное устройство выполнено с возможностью получения сигналов от дублирующих органов управления и формирования управляющих воздействий для отправки их на блок моделирования.
6. Рабочее место-тренажер по п.4, отличающееся тем, что блок дистанционного контроля и управления беспилотным подвижным составом выполнен с возможностью обработки сигналов, поступающих от дублирующих органов управления, и формирования управляющих воздействий для их отправки на интерфейс связи с беспилотным подвижным составом.
7. Рабочее место-тренажер по п.4, отличающееся тем, что дублирующие органы управления установлены в подлокотниках кресла.
8. Рабочее место-тренажер по п.1 или 4, отличающееся тем, что органы управления или дублирующие органы управления снабжены контрольными устройствами.
9. Рабочее место-тренажер по п. 8, отличающееся тем, что контрольные устройства выполнены с возможностью получения и отправки на вычислительное устройство данных о задействовании машинистом-оператором органов управления и дублирующих органов управления.
10. Рабочее место-тренажер по п.1 или 4, отличающееся тем, что органы управления или дублирующие органы управления снабжены элементами индикации их состояния.
| Четырехцилиндровый вытяжной прибор к прядильной машине для мокрого прядения льна | 1952 |
|
SU98621A1 |
| Устройство контроля за управлением локомотивом и бдительностью машиниста | 2021 |
|
RU2766936C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

