Предшествующий уровень техники
I. Область техники
Настоящее изобретение относится в общем к беспроводной связи, более конкретно к устройству и способу для фильтрации сигналов базовой полосы в системе беспроводной связи.
II. Описание предшествующего уровня техники
В последние годы возрастает количество сложности систем беспроводной связи. Для множества провайдеров беспроводного обслуживания обычной является работа в одном и том же географическом регионе с перекрытием зон обслуживания. Из-за возросшего количества провайдеров беспроводного обслуживания и увеличенного коэффициента загруженности участки частотного спектра, распределенного для беспроводного обслуживания, часто используются с их полной нагрузкой или за ее пределами.
Система беспроводной связи множественного доступа с кодовым разделением каналов (МДКРК) имеет значительную пропускную способность, потому что многочисленные пользователи могут одновременно осуществлять связь на одном и том же радиочастотном (РЧ) канале посредством цифрового кодирования каждой передачи с использованием кодов формирования каналов. Термин "РЧ-канал" относится к участку частотного спектра. Коды формирования каналов, которые иногда упоминаются как "ортогональные коды", кодируют передачу для каждого беспроводного устройства связи так, что передача для данного беспроводного устройства связи может быть восстановлена этим устройством, тогда как эта же передача проявляется для других устройств беспроводной связи в виде шума. Таким образом, система МДКРК позволяет многочисленным пользователям одновременно работать на одном и том же РЧ-канале.
В пределах конкретного географического региона многочисленные базовые системы приемопередатчиков (БСПП) могут работать на различных РЧ-каналах, чтобы снижать до минимума взаимное влияние со смежными областями зоны обслуживания. Во многих системах беспроводной связи имеется защитная полоса или участок частотного спектра, разделяющий РЧ-каналы, чтобы обеспечивать дополнительную защиту от взаимного влияния между системами БСПП.
Однако некоторые системы беспроводной связи не имеют достаточной защитной полосы или вообще не имеют никакой защитной полосы. При этом рабочем сценарии может появляться возможность возникновения взаимных помех между системами БСПП, которые работают на соседних РЧ-каналах.
Используемые в настоящее время системы беспроводной связи не всегда способны преодолевать такие взаимные помехи от соседних каналов. Поэтому имеется существенная необходимость в устройстве и способе фильтрации, которые улучшают функционирование систем беспроводной связи.
Сущность изобретения
Заявлены устройство и способ для выполнения фильтрации в системе беспроводной связи. Принимаемый сигнал в устройстве беспроводной связи обрабатывается (например, фильтруется, усиливается и преобразуется с понижением частоты) РЧ-модулем для получения сигналов базовой помощи. Сигналы базовой помощи дополнительно фильтруются аналоговыми и/или цифровыми фильтрами, оцифровываются аналого-цифровыми преобразователями (АЦП) и обрабатываются (например, демодулируются и декодируются) для получения декодированных данных. В общем, желательно регулировать частотный отклик фильтров (например, ширину полосы пропускания, порядок фильтров и так далее) таким образом, чтобы отношение сигнал-шум (ОСШ) отфильтрованных сигналов, после всех фильтраций в беспроводном устройстве, увеличивалось до максимума. ОСШ зависит от уровней сигнала и шума. Уровень сигнала в принимаемом сигнале может изменяться в широком диапазоне. Шум в отфильтрованных сигналах может происходить от различных источников, таких как шум канала, шум приемника, шум квантования и взаимные помехи между элементарными сигналами (ВПЭС), все они описаны ниже.
Частотный отклик (например, ширину полосы пропускания) фильтра можно регулировать на основании одного или более критериев, таких как интенсивность полезного сигнала, интенсивность нежелательного сигнала и так далее. В одном варианте осуществления, ширина полосы пропускания фильтра регулируется на основании интенсивности принимаемого (или полезного) сигнала, которая указывает на интенсивность сигнала компонентов полезного сигнала в принимаемом сигнале. (Компоненты полезного сигнала представляют собой внутриполосные компоненты сигнала в пределах выбранного РЧ-канала.) Ширина полосы пропускания фильтра может уменьшаться, если интенсивность принимаемого сигнала ниже первого порогового значения, и увеличиваться, если интенсивность принимаемого сигнала превышает второе пороговое значение. В другом варианте осуществления ширина полосы пропускания фильтра регулируется на основании интенсивности нежелательного сигнала, которая указывает на интенсивность сигнала компонентов нежелательного сигнала (или "преднамеренных радиопомех") в принимаемом сигнале. (Компоненты нежелательного сигнала представляют собой внеполосные компоненты сигнала за пределами выбранного РЧ-канала.) Ширина полосы пропускания фильтра может уменьшаться, если интенсивность нежелательного сигнала превышает предварительно определенное пороговое значение, и увеличиваться, если интенсивность нежелательного сигнала падает ниже этого порогового значения. Ширина полосы пропускания фильтра также может регулироваться на основании комбинации критериев, как описано ниже.
Каждая настройка ширины полосы пропускания фильтра обычно связан с отличающейся задержкой. Во избежание нарушения временных характеристик принимаемого сигнала, которые могут быть важными для некоторых систем беспроводной связи, таких как система МДКРК, чтобы избегать ухудшения рабочих характеристик, в тракте передачи сигналов могут предусматриваться блоки регулируемой задержки. Эти блоки задержки регулируются одновременно с фильтрами таким образом, чтобы полная задержка фильтров и блоков задержки поддерживалась приблизительно постоянной, даже когда фильтры регулируются.
Ниже более подробно описаны различные аспекты и варианты осуществления изобретения.
Краткое описание чертежей
Признаки и сущность настоящего изобретения поясняются в приведенном ниже подробном описании со ссылками на чертежи, на которых подобные ссылочные позиции представлены соответствующим образом на протяжении всех чертежей и на которых:
фиг.1 изображает беспроводное устройство связи, которое реализует вариант осуществления настоящего изобретения;
фиг.2A-2C изображает выборочные частотные спектры, иллюстрирующие метод фильтрации по настоящему изобретению;
фиг.3 изображает беспроводное устройство связи, которое реализует другой вариант осуществления настоящего изобретения;
фиг.4A и 4B изображают выборочные частотные спектры, иллюстрирующие метод фильтрации с имеющим форму шума АЦП;
фиг.5 изображает беспроводное устройство связи, которое реализует еще один вариант осуществления настоящего изобретения;
фиг.6 изображает регулируемый блок фильтров с постоянной задержкой;
фиг.7 изображает блок фильтров с постоянной задержкой, реализованный с аналоговым регулируемым фильтром и цифровым блоком регулируемой задержки.
Подробное описание
Настоящее изобретение направлено на методы фильтрации сигналов базовой полосы и улучшение надежности беспроводной связи. В варианте осуществления в принимаемом сигнале измеряется интенсивность сигнала. Когда принимаемый сигнал находится на низком уровне сигнала, ширина полосы пропускания фильтра может быть уменьшена. Уменьшение ширины полосы пропускания уменьшает ширину шумовой полосы частот и увеличивает подавление соседних каналов. И наоборот, когда интенсивность принимаемого сигнала находится на высоком уровне сигнала, ширина полосы пропускания фильтра может быть увеличена, чтобы воспользоваться преимуществом большей интенсивности сигнала.
Беспроводное устройство связи имеет радиочастотный (РЧ) модуль, который формирует (например, фильтрует, усиливает с низким уровнем собственных шумов, преобразует с понижением частоты и так далее) принимаемый сигнал в выбранном РЧ-канале. Участок спектра, доступный для беспроводной связи, может быть разделен на множество РЧ-каналов, каждый из которых имеет ширину полосы пропускания, обозначенную посредством промышленного стандарта.
Беспроводное устройство связи может реализовывать архитектуру супергетеродинного приемника или архитектуру приемника прямого преобразования в базовую полосу. В случае архитектуры супергетеродинного приемника, принимаемый сигнал смешивается или преобразуется с радиочастоты (РЧ) на промежуточную частоту (ПЧ) в одном каскаде преобразования с понижением частоты, а затем с промежуточной частоты на частоту базовой полосы (например, ПС (постоянной составляющей) или почти ПС) в другом каскаде преобразования с понижением частоты. На ПЧ могут быть выполнены дополнительные усиление и/или фильтрация. Для архитектуры приемника прямого преобразования в базовую полосу, которая становится все более распространенной в беспроводных устройствах связи, особенно в беспроводном устройстве связи МДКРК, принимаемый сигнал смешивается или преобразуется непосредственно с радиочастоты на частоту базовой полосы. Для ясности, реализации, иллюстрируемые в данном описании, направлены на беспроводное устройство МДКРК, которое использует архитектуру приемника прямого преобразования в базовую полосу. Однако специалистам в данной области техники должно быть понятно, что принципы настоящего изобретения являются подходящими для систем беспроводной связи, отличающихся от системы МДКРК, и для архитектур приемников, которые не используют прямое преобразование в базовую полосу.
Фиг.1 изображает блок-схему беспроводного устройства 100a связи, которое реализует вариант осуществления настоящего изобретения. Беспроводное устройство 100a включает в себя РЧ-модуль 106, который подсоединен к антенне 104. РЧ-модуль 106 включает в себя РЧ-каскад 108, разветвитель 110 и смесители 112 и 114 преобразования с понижением частоты. РЧ-каскад 108 может включать в себя усилители и/или фильтры, используемые для усиления и фильтрации принимаемого сигнала от антенны 104.
РЧ-каскад 108 передает сформированный РЧ-сигнал в разветвитель 110, который разделяет этот РЧ-сигнал на два идентичных сигнала для последующего квадратурного преобразования с понижением частоты. Два идентичных сигнала от разветвителя 110 передаются в смесители 112 и 114 преобразования с понижением частоты. Смеситель преобразования с понижением частоты принимает радиочастотный сигнал и сигнал гетеродина (ГТ) в качестве входных сигналов и генерирует сигнал, преобразованный с понижением частоты, содержащий компоненты сигнала в виде суммы и разности частот этих двух входных сигналов. Смесители 112 и 114 преобразования с понижением частоты идентичны в функционировании за исключением фаз их сигналов гетеродина. Сигнал гетеродина, подаваемый в смеситель 112 преобразования с понижением частоты, обозначен как синфазный сигнал гетеродина (ССГТ), тогда как сигнал гетеродина, подаваемый в смеситель 114 преобразования с понижением частоты, обозначен как квадратурный сигнал гетеродин (КСГТ). Сигналы ССГТ и КСГТ имеют одинаковую частоту, но имеют смещение по фазе на 90° относительно друг друга. Поэтому выходные сигналы смесителей 112 и 114 преобразования с понижением частоты представляют собой квадратурные сигналы базовой полосы, обозначенные как Смс и Кмс соответственно. Как отмечено выше, беспроводное устройство, показанное на фиг.1, использует архитектуру приемника прямого преобразования в базовую полосу. Соответственно сигналы ССГТ и КСГТ смешиваются с принимаемым сигналом непосредственно из выбранного РЧ-канала для преобразования на частоту битовой полосы. Выбор РЧ-канала выполняется посредством управления частотой сигналов КСГТ и ССГТ.
Смесители 112 и 114 преобразования с понижением частоты обеспечивают синфазный и квадратурный сигналы базовой полосы для каскада 120 фильтров, который содержит фильтры 122 и 124. В обычной конструкции фильтрами 122 и 124 могут быть просто фильтры нижних частот, имеющие фиксированную ширину полосы пропускания. Однако в беспроводном устройстве 100a фильтры 122 и 124 имеют переменные частотные отклики (например, переменную ширину полосы пропускания, порядок формирующего фильтра и так далее). Как описано более подробно ниже, ширина полосы пропускания фильтров 122 и 124 регулируется на основании интенсивности принимаемого сигнала и/или других критериев. Фильтры 122 и 124 могут функционировать как фильтры защиты от наложения спектров в добавление к функции фильтра переменной ширины полосы пропускания по настоящему изобретению. Фильтры 122 и 124 обеспечивают сигналы, отфильтрованные фильтрами нижних частот, которые являются аналоговыми сигналами базовой полосы и обозначены как Сфнч и Кфнч, для аналого-цифровых преобразователей (АЦП) 130 и 132 соответственно.
АЦП 130 и 132 преобразуют аналоговые сигналы базовой полосы от фильтров 122 и 124 в цифровую форму и обеспечивают выборки для последующей обработки. Функционирование АЦП 130 и 132 в технике известно. Хотя можно использовать любой тип АЦП для реализации АЦП 130 и 132, метод фильтрации, описанный в данном описании, хорошо подходит для использования вместе с АЦП расширенного динамического диапазона с формированием шума, такими как АЦП типа дельта-сигма, или другими АЦП с формированием шума. Однако метод фильтрации не ограничен каким-либо конкретным типом АЦП. Дополнительная обработка сигналов (например, демодуляция и декодирование) выполняется на выборках для получения декодированных данных. Эта обработка сигналов известна в технике и в данном описании не описана.
Выборки от АЦП 130 и 132 также используются для контура 134 автоматической регулировки усиления (АРУ). Контур 134 АРУ генерирует сигнал регулирования усиления, который управляет усилением усилителя с регулируемым коэффициентом усиления (УРКУ) (на фиг.1 не показан) так, чтобы амплитуда аналоговых сигналов базовой полосы, передаваемых на АЦП 130 и 132, была на надлежащем уровне. Тогда это улучшает функциональные характеристики процесса преобразования АЦП.
Выборки от АЦП 130 и 132 передаются на входы схемы 140 устройства обнаружения/АРУ сигналов. Схема 140 АРУ содержит компоненты, известные в технике. Например, схема 140 АРУ может включать в себя логарифмический преобразователь, чтобы усиление УРКУ регулировалось в децибелах (дБ) вместо линейной формы. Схема 140 АРУ также может включать в себя интегратор для управления временем отклика контура, схему линеаризации, чтобы обеспечивать поправочные коэффициенты для нелинейных характеристик регулирования усиления, и так далее. Схема линеаризации обеспечивает поправочные коэффициенты, чтобы линеаризовать управляющее напряжение УРКУ. УРКУ может быть отдельным устройством, включенным, например, между РЧ-каскадом 108 и разветвителем 110. В качестве альтернативы УРКУ может входить в состав РЧ-каскада 108 и быть его неотъемлемой частью. Усиление УРКУ может быть плавно регулируемым или может регулироваться скачкообразно. Другие компоненты также могут быть частью схемы 140 АРУ и контура 134 АРУ, как известно в технике.
Схема 140 устройства обнаружения/АРУ сигналов также обеспечивает измерение интенсивности принимаемого сигнала, которая является интенсивностью сигнала компонентов полезного сигнала. В системах беспроводной связи этот уровень иногда упоминается как индикатор интенсивности принимаемого сигнала (ИИПС). В дополнение к управлению УРКУ, ИИПС от схемы 140 АРУ передается к блок 144 управления фильтрами. Блок 144 управления фильтрами использует ИИПС для управления шириной полосы пропускания фильтров 122 и 124. Блок 144 управления фильтрами генерирует сигнал 146 управления фильтрами, который передается в фильтры 122 и 124 и используется для управления шириной полосы пропускания этих фильтров. Сигнал 146 управления фильтрами может иметь множество форм. Например, сигналом 146 управления фильтрами может быть информационное слово последовательного шинного интерфейса (ПШИ), сигнал цифрового управления (с одним или больше битами), напряжение аналогового управления и так далее. Детали реализации сигнала 146 управления фильтрами могут быть осуществлены специалистом в данной области техники на основании сведений, содержащихся в данном описании.
Беспроводное устройство 100a связи может быть предназначено для работы с принимаемым сигналом, который может изменяться в широком диапазоне уровней сигнала (например, 80 дБ или больше для МДКРК). Этот диапазон уровней или диапазон входной мощности принимаемого сигнала может быть разделен на множество поддиапазонов. Уровень мощности, который определяет два смежных поддиапазона, упоминается как пороговое значение мощности, пороговое значение сигнала или просто пороговое значение. Каждый поддиапазон может упоминаться как "режим мощности". Ширина полосы пропускания фильтра может регулироваться на основании режима мощности принимаемого сигнала.
В варианте осуществления полный диапазон входной мощности разделен на три режима мощности - режимы низкой/слабой, промежуточной и высокой/сильной мощности. Эти три режима мощности определены двумя пороговыми значениями - первым пороговым значением (Пор1) и вторым пороговым значением (Пор2). Однако полный диапазон входной мощности может быть разделен на любое количество режимов мощности.
В общем, желательно регулировать частотный отклик фильтров (например, ширину полосы пропускания, порядок фильтра и так далее) так, чтобы ОСШ отфильтрованных сигналов, после всех фильтраций в беспроводном устройстве, увеличивалось до максимума. ОСШ зависит от уровней сигнала и шума. Уровень сигнала для принимаемого сигнала может изменяться в широком диапазоне, как описано выше. Шум в отфильтрованных сигналах может происходить из различных источников, таких как шум канала, шум приемника, шум квантования и ВПЭС (взаимные помехи между элементарными сигналами). Шум канала включает в себя шум и радиопомехи в беспроводном канале (например, радиопомехи от РЧ-сигналов в соседних РЧ-каналах). Шум приемника включает в себя шум, обусловленный электрическими схемами в тракте приема (например, шум, генерируемый РЧ-модулем 106). Шум квантования обусловлен использованием АЦП 130 и 132 для оцифровывания непрерывных аналоговых сигналов базовой полосы для получения цифровых выборок, имеющих дискретные значения. ВПЭС представляют собой искажение, генерируемое элементарным сигналом в сигнале, действующее как искажение для одного или больше последующих элементарных сигналов в сигнале. Это искажение ухудшает функциональные характеристики, воздействуя на способность правильно обнаруживать принимаемые элементарные сигналы. ВПЭС в общем увеличивается, когда ширина полосы пропускания фильтра сужается.
Ширина полосы пропускания фильтра влияет на различные типы шума в отфильтрованных сигналах. Узкая полоса пропускания фильтра удаляет большую часть шума канала, обеспечивает большее подавление помех от соседних каналов, удаляет большую часть шума квантования (если фильтрация выполняется после АЦП), но увеличивает ВПЭС. Широкая полоса пропускания фильтра пропускает большую часть шума канала, обеспечивает меньшее подавление помех от соседних каналов, удаляет меньшую часть шума квантования, но уменьшает ВПЭС.
Когда интенсивность принимаемого сигнала низкая или слабая, часто бывает желательно снижать ширину полосы пропускания фильтра, чтобы уменьшить шум канала и шум квантования. Поскольку ВПЭС пропорциональны интенсивности принимаемого сигнала, величина искажений из-за ВПЭС обычно бывает малой по сравнению с другими типами шума, когда интенсивность принимаемого сигнала низкая. Таким образом, функциональные характеристики обычно могут быть улучшены посредством снижения ширины полосы пропускания фильтра для низкой интенсивности принимаемого сигнала.
И наоборот, когда интенсивность принимаемого сигнала высокая, часто бывает желательно увеличивать ширину полосы пропускания фильтра. Когда интенсивность принимаемого сигнала высокая, шум канала и шум квантования обычно бывают малыми по сравнению с ВПЭС. Ширина полосы пропускания фильтра, согласованная с шириной полосы принимаемого сигнала, может снижать до минимума ВПЭС и полный шум. Таким образом, функциональные характеристики обычно могут быть улучшены посредством увеличения ширины полосы пропускания фильтра для высокой интенсивности принимаемого сигнала.
Таблица 1 изображает примерные параметры настройки ширины полосы пропускания фильтра для различных условий интенсивности принимаемого сигнала. Нормальная ширина полосы пропускания является более широкой, чем промежуточная ширина полосы пропускания, которая шире, чем узкая полоса. Ширина полосы пропускания фильтра может относиться к 3 дБ ширине полосы пропускания или эквивалентной ширине шумовой полосы частот, обе из которых известны в технике. Параметры настройки в таблице 1 подробно описаны ниже.
В варианте осуществления блок 144 управления фильтрами генерирует сигнал 146 управления фильтрами, чтобы поддерживать нормальную ширину полосы пропускания для фильтров 122 и 124, когда интенсивность принимаемого сигнала (например, ИИПС) выше первого порогового значения (Пор1). Нормальная ширина полосы пропускания может быть установлена равной ширине полосы пропускания фильтра в обычной системе МДКРК, которая может быть половиной ширины полосы пропускания РЧ-канала. (Ширина полосы пропускания РЧ-канала составляет 1,2288 МГц для системы МДКРК IS-95.) В присутствии относительно сильного принимаемого сигнала желательно увеличивать ширину полосы пропускания фильтров 122 и 124, чтобы захватывать насколько возможно больше энергии сигнала и снижать до минимума ВПЭС.
Напротив, когда интенсивность принимаемого сигнала (например, ИИПС) низкая, может быть желательно снижать ширину полосы пропускания фильтров 122 и 124. В варианте осуществления, если ИИПС ниже второго порогового значения (Пор2), сигнал 146 управления фильтрами настраивает фильтры 122 и 124 на узкую ширину полосы пропускания. Уменьшение ширины полосы пропускания уменьшает ширину шумовой полосы частот, а также улучшает подавление помех от соседних каналов.
Для фильтров 122 и 124 может использоваться промежуточная ширина полосы пропускания, если интенсивность принимаемого сигнала (например, ИИПС) выше второго порогового значения, но ниже первого порогового значения. Как описано ниже, промежуточная ширина полосы пропускания может быть выбрана так, чтобы оптимизировать шум и искажение. В альтернативном варианте осуществления фильтры 122 и 124 могут иметь регулируемую ширину полосы пропускания, которая уменьшается, когда уменьшается интенсивность принимаемого сигнала (например, ИИПС).
Уменьшение ширины полосы пропускания особенно важно в системе беспроводной связи, в которой не обеспечена никакая защитная полоса или имеются неадекватные защитные полосы частот. Эта концепция проиллюстрирована в виде выборочных спектров, показанных на фиг.2A-2C. На фиг.2A иллюстрируется спектр с разделением адекватными защитными полосами между соседними РЧ-каналами. Разделение защитными полосами обеспечивает возможность РЧ-сигналу в одном РЧ-канале проходить без создания радиопомех для РЧ-сигналов в смежных РЧ-каналах.
Фиг.2B иллюстрирует спектр, в котором никакие защитные полосы не обеспечены. Как можно заметить на фиг. 2B, наложение между РЧ-сигналами в соседних РЧ-каналах КН1 и КН2 является очевидным. Подобное наложение происходит между РЧ-сигналами в соседних РЧ-каналах КН2 и КН3. Наложение между РЧ-сигналами вызывает радиопомехи, которые уменьшают ОСШ каждого обрабатываемого РЧ-сигнала.
Фиг. 2C иллюстрирует использование фильтра переменной ширины полосы пропускания, посредством примера, в РЧ-канале КН1. РЧ-сигнал в РЧ-канале КН1 фильтруется с узкой шириной полосы пропускания. Как очевидно из фиг.2C, узкая ширина полосы пропускания отфильтровывает участок спектра РЧ-сигнала в РЧ-канале КН2, который в противном случае перекрывался бы и вызывал радиопомехи с РЧ-сигналом в РЧ-канале КН1. Результатом является увеличение подавления помех от соседних каналов для РЧ-канала КН1.
Вариант осуществления по фиг.1 иллюстрирует аналоговую реализацию для каскада 120 фильтров. Однако беспроводное устройство 100a также может реализовывать цифровые фильтры или комбинацию аналоговых и цифровых фильтров.
Фиг.3 изображает блок-схему беспроводного устройства 100b связи, которое реализует другой вариант осуществления настоящего изобретения. Как иллюстрируется на фиг.3, выборки от АЦП 130 и 132 передаются на цифровые фильтры 150 и 152 соответственно. Цифровые фильтры 150 и 152 функционируют способом, аналогичным описанному выше для фильтров 122 и 124. То есть цифровые фильтры 150 и 152 могут быть установлены на нормальную ширину полосы пропускания, когда интенсивность принимаемого сигнала выше первого порогового значения (Пор1).
Когда интенсивность принимаемого сигнала ниже первого порогового значения, блок 144 управления фильтрами генерирует сигнал 156 управления фильтрами так, чтобы снижать ширину полосы пропускания цифровых фильтров 150 и 152. Цифровые фильтры 150 и 152 могут быть реализованы как часть цифрового процессора сигналов (ЦПС) (не показан) или центрального процессора (ЦП) (не показан).
Сигнал 156 управления фильтрами на фиг.3 показан в виде единственной линии управления. Однак, цифровые фильтры 150 и 152 могут быть реализованы посредством обеспечения новых коэффициентов фильтрации, чтобы изменять частотный отклик (например, ширину полосы пропускания, форму и/или порядок) цифровых фильтров 150 и 152. Таким образом, сигнал 156 управления фильтрами может содержать коэффициенты для цифровых фильтров, чтобы получать желательный частотный отклик.
В дополнение к цифровым фильтрам 150 и 152 беспроводное устройство 100b также может включать в себя аналоговые фильтры 122 и 124. Фильтры 122 и 124 иллюстрируются на фиг.3 пунктирными линиями, чтобы указать, что они являются необязательными для функционирования с переменной шириной полосы пропускания. Однако комбинация аналоговых фильтров 122 и 124 и цифровых фильтров 150 и 152 может обеспечивать дополнительную фильтрацию, что может быть желательным в некоторых сценариях. Сигнал 146 управления фильтрами может быть реализован в аналоговой или цифровой форме, как описано выше. Независимо от того, реализовано ли беспроводное устройство 100b с аналоговыми фильтрами 122 и 124, цифровыми фильтрами 150 и 152 или с комбинацией аналоговых и цифровых фильтров, настройка ширины полосы пропускания фильтра на основании интенсивности принимаемого сигнала улучшает функциональные характеристики беспроводного устройства 100b.
Беспроводное устройство 100b уменьшает ширину полосы пропускания фильтров (аналоговых фильтров 122 и 124 и/или цифровых фильтров 150 и 152) на основании уровня принимаемого сигнала. В одной реализации ширина полосы пропускания фильтров уменьшается, когда принимаемый сигнал, обеспечиваемый для РЧ-каскада 108 (см. фиг.1), находится на уровне чувствительности. Термин "на уровне чувствительности" относится к самому низкому различимому сигналу, который может быть обработан беспроводным устройством связи. Определение приемника на уровне чувствительности известно в технике и в данном описании не представлено.
Когда принимаемый сигнал для беспроводного устройства 100b находится на уровне чувствительности, доминирующие источники шума представляют собой тепловой шум и шум квантования от АЦП 130 и 132. Когда принимаемый сигнал находится на уровне чувствительности, беспроводное устройство 100b работает ниже второго порогового значения (Пор2). В этом режиме низкой мощности ширина полосы пропускания фильтров (то есть аналоговых фильтров 122 и 124 и/или цифровых фильтров 150 и 152) уменьшается, чтобы снижать шум в отфильтрованных выборках Сданные и Кданные.
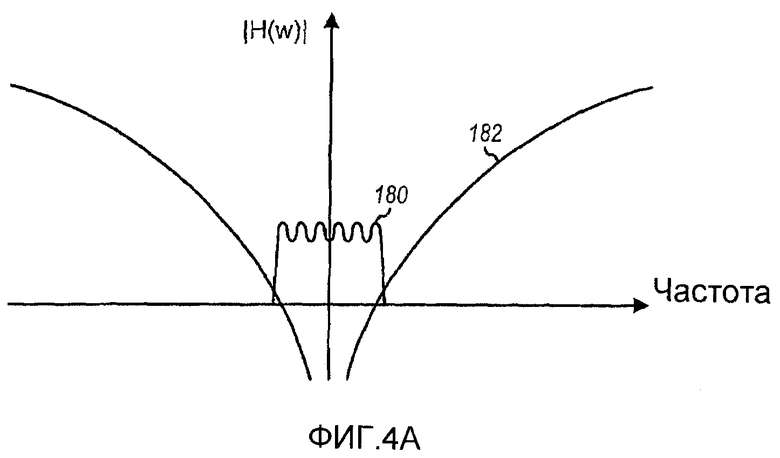
Как отмечено выше, АЦП 130 и 132 могут быть преобразователями типа дельта-сигма или некоторого другого типа, которые спектрально ограничивают шум квантования таким образом, что шум является низким внутри полосы, но быстро увеличивается за пределами полосы. Эта концепция иллюстрируется на фиг.4A, где спектр 180 сигнала низкой мощности представлен в виде графика относительно спектра 182 шума квантования для имеющего форму шума АЦП типа дельта-сигма. АЦП типа дельта-сигма смещает шум квантования к верхним частотам так, чтобы выборки от АЦП испытывали меньшее влияние шума квантования внутри полосы. Более высокий внеполосный шум квантования может быть отфильтрован цифровыми фильтрами 150 и 152. Хотя фиг.4A иллюстрирует спектр шума квантования АЦП типа дельта-сигма, беспроводное устройство 100b может использовать другие типы АЦП независимо от того, являются ли они преобразователями с формированием шума, или нет. Однако для беспроводного устройства 100b хорошо подходит имеющий АЦП с формированием шума.
Если поддерживается нормальная ширина полосы пропускания, то спектр 180 для принимаемого сигнала будет включать в себя значительную часть шума квантования. Однако уменьшение ширины полосы пропускания фильтров 150 и 152 генерирует спектр 180. Как иллюстрируется на фиг.4A, уменьшенная ширина полосы пропускания спектра 180 приводит к уменьшению величины шума квантования, включаемого в отфильтрованные выборки Сданные и Кданные, таким образом приводя к улучшению функциональных характеристик всей системы. Хотя уменьшение ширины полосы пропускания ведет к более сильному искажению в форме ВПЭС, увеличение ВПЭС является незначительным до тех пор, пока входная мощность намного выше.
Использование двух пороговых значений (то есть первого и второго пороговых значений) обеспечивает возможность трех режимов мощности функционирования. Режим низкой мощности обсуждался выше. Фильтрация для режима высокой мощности (то есть с интенсивностью принимаемого сигнала выше первого порогового значения) является оптимальной, когда ширина полосы пропускания фильтров (то есть фильтров 122 и 124 и/или цифровых фильтров 150 и 152) регулируется так, чтобы достигать нулевых или почти нулевых ВПЭС. Например, ширина полосы пропускания аналоговых фильтров 122 и 124 может быть расширена, чтобы снижать величину относительного спада вершины импульса. В качестве альтернативы или дополнительно цифровые фильтры 150 и 152 могут быть перепрограммированы с новыми коэффициентами фильтров, чтобы достигать низких ВПЭС. Коэффициенты фильтров могут быть выбраны так, чтобы регулировать ширину полосы пропускания фильтра и/или корректировать фазовые и амплитудные характеристики цифровых фильтров 150 и 152 для достижения низких ВПЭС.
Для режима высокой мощности обеспечение возможности прохождения дополнительного шума через фильтры в результате более широкой полосы пропускания не является проблемой, поскольку полный шум обычно все еще значительно ниже уровня сигнала. Это иллюстрируется на фиг.4B, где спектр 184 сигнала высокой мощности представлен в виде графика относительно спектра 182 шума квантования. Хотя пример, иллюстрируемый на фиг.4B, включает в себя большую степень шума квантования от АЦП 130 и 132 (см. фиг.1 и 3), дополнительный шум квантования является незначительным по сравнению с высокой мощностью отфильтрованного сигнала в спектре 184.
Режим промежуточной мощности возникает, когда интенсивность принимаемого сигнала ниже первого порогового значения и выше второго порогового значения. В этом режиме мощности реализуется компромисс между шириной шумовой полосы частот и ВПЭС. Ширина полосы пропускания фильтров выбирается для оптимального функционирования относительно различных источников шума. Аналоговые фильтры 122 и 124 могут быть настроены на требуемую промежуточную ширину полосы пропускания, и/или коэффициенты цифровых фильтров 150 и 152 могут быть выбраны для получения требуемой промежуточной ширины полосы пропускания.
В упрощенном варианте осуществления беспроводных устройств 100a и 100b, первое и второе пороговые значения могут быть идентичны (то есть используется единственное пороговое значение). В этом варианте осуществления беспроводные устройства 100a и 100b работают либо в режиме высокой мощности, либо низкой мощности. Фильтры имеют узкую или уменьшенную ширину полосы пропускания в режиме низкой мощности и широкую или нормальную ширину полосы пропускания в режиме высокой мощности. Промежуточный режим мощности, с фильтрами с промежуточной полосой пропускания, в этом упрощенном варианте осуществления исключен.
Поскольку входная мощность известна или может быть измерена, можно сузить ширину полосы пропускания фильтра на уровне чувствительности и увеличивать ширину полосы пропускания фильтра для высоких уровней входной мощности. Беспроводные устройства 100a 100b генерируют сигналы управления фильтрами (то есть сигнал 146 и/или 156 управления фильтрами) чтобы регулировать ширину полосы пропускания соответствующего фильтра для высоких уровней входной мощности. Таким образом, функциональные характеристики всей системы улучшаются благодаря дополнительной фильтрации.
Ширина полосы пропускания фильтра может регулироваться, основываясь исключительно на интенсивности принимаемого сигнала, как описано выше. Ширина полосы пропускания фильтра также может регулироваться на основании некоторого другого критерия или комбинации критериев, таких как интенсивность принимаемого сигнала, интенсивности нежелательного сигнала, отношение сигнал-шум (ОСШ) и так далее. Интенсивность принимаемого сигнала указывает на полную мощность (то есть сигнала плюс шум) компонентов полезного сигнала в пределах РЧ-канала, представляющего интерес. ОСШ указывает на качество полезного сигнала (то есть, полезного сигнала, разделенного на шум) в пределах РЧ-канала, представляющего интерес. ОСШ может быть оценено, например, на основании принимаемого пилот-сигнала. Преднамеренные радиопомехи представляют собой нежелательный мешающий сигнал, который находится за пределами РЧ-канала, представляющего интерес и может быть намного выше (например, выше на десятки дБ) по амплитуде, чем полезный сигнал. Интенсивность принимаемого сигнала и ОСШ обычно измеряются на основании отфильтрованных сигналов, то есть после фильтрации в беспроводном устройстве. Преднамеренные радиопомехи обычно обнаруживаются на основании неотфильтрованных сигналов, то есть до фильтрации. Обнаружение преднамеренных радиопомех может быть выполнено на сигналах, преобразованных с понижением частоты, от смесителей 112 и 114, для принимаемого сигнала от антенны 104, сформированного РЧ-сигнала от РЧ-каскада 108 и так далее. Преднамеренные радиопомехи могут быть оценены, как «высокие», если интенсивность сигнала, измеряемого для преднамеренных радиопомех, больше, чем пороговое значение преднамеренных радиопомех (Пор.пр.), и как «низкие» в противном случае.
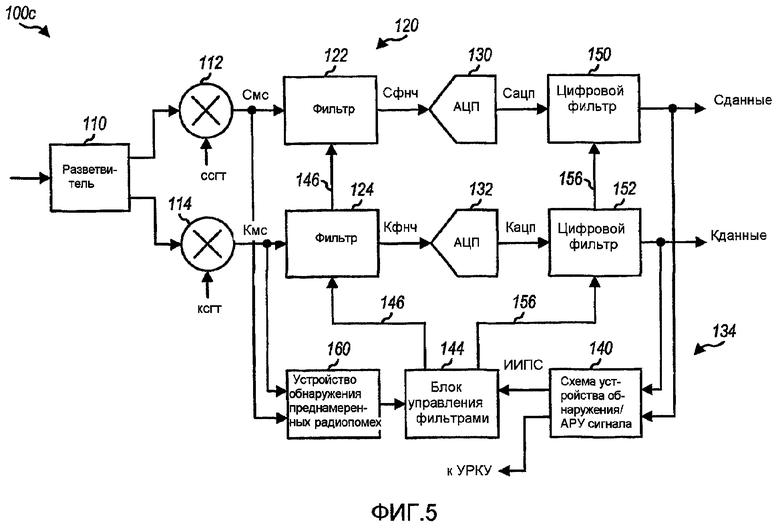
Фиг. 5 изображает блок-схему беспроводного устройства 100c связи, которое реализует еще один вариант осуществления настоящего изобретения. Беспроводное устройство 100c подобно устройству 100b, но дополнительно включает в себя устройство 160 обнаружения преднамеренных радиопомех. Для варианта осуществления, показанного на фиг.5, устройство 160 обнаружения преднамеренных радиопомех принимает сигналы базовой полосы от смесителей 112 и 114, выявляет присутствие преднамеренных радиопомех и обеспечивает индикацию относительно обнаруженных преднамеренных радиопомех для блока 144 управления фильтрами. Устройство 160 обнаружения преднамеренных радиопомех может измерять интенсивность сигнала в сигналах базовой полосы, сравнивать измеряемую интенсивность сигнала с пороговым значением Пор.пр. преднамеренных радиопомех и обеспечивать индикацию того, что преднамеренные радиопомехи присутствуют, если измеренная интенсивность сигнала больше, чем пороговое значение Пор.пр. преднамеренных радиопомех. Устройство 160 обнаружения преднамеренных радиопомех может включать в себя фильтр нижних частот, который фильтрует сигнал базовой полосы (или принимаемый РЧ-сигнал), и устройство определения уровня мощности, которое измеряет мощность сигнала базовой полосы для выходного сигнала фильтра нижних частот. Устройство 160 обнаружения преднамеренных радиопомех также может включать в себя фильтр верхних частот, который фильтрует сигнал базовой полосы (или принимаемый РЧ-сигнал), а устройство определения уровня мощности также измеряет мощность сигнала базовой полосы для выходного сигнала фильтра верхних частот. Фильтр, блок задержки, или как фильтр, так и блок задержки могут регулироваться на основании измеряемой мощности сигнала базовой полосы для выходного сигнала фильтра нижних частот и/или мощности сигнала базовой полосы для выходного сигнала фильтра верхних частот.
Таблица 2 изображает примерные параметры настройки ширины полосы пропускания фильтра для различных условий интенсивности принимаемого сигнала и преднамеренных радиопомех. В общем, ширина полосы пропускания фильтра уменьшается, когда обнаруживаются преднамеренные радиопомехи высокой амплитуды, и увеличивается в противном случае. Ширина полосы пропускания фильтра может быть установлена способом, отличающимся от показанного в таблице 2, и это входит в объем изобретения.
радиопомехи
параметры фильтра
Любой фильтр, либо аналоговый, либо цифровой, может характеризоваться частотным откликом, который включает в себя амплитудно-частотную характеристику и фазо-частотную характеристику. Амплитудная характеристика определяет величину ослабления для компонентов сигнала на различных частотах. Фазовая характеристика определяет величину фазового сдвига для компонентов сигнала на различных частотах, которая, в свою очередь, определяет величину задержки прохождения через фильтр. В общем, для данного порядка фильтра более широкая полоса пропускания соответствует меньшей задержке, а узкая полоса соответствует большей задержке. Кроме того, для данной ширины полосы пропускания фильтр более высокого порядка имеет большую величину задержки, чем фильтр более низкого порядка.
В некоторых системах беспроводной связи беспроводному устройству может требоваться непрерывное отслеживание временных характеристик принимаемого сигнала, чтобы этот сигнал можно было должным образом демодулировать. Например, в системе МДКРК каждая БСПП или базовая станция выполняет расширение спектра своего сигнала с помощью последовательности псевдослучайных чисел (ПСЧ) до передачи на беспроводные устройства. Чтобы восстановить переданный сигнал, беспроводное устройство должно было осуществлять комплементарную операцию сжатия над принятым сигналом с помощью локально генерируемой последовательности ПСЧ, которая выровнена по времени с последовательностью ПСЧ принимаемого сигнала. Таким образом, беспроводное устройство должно оценивать и отслеживать временные характеристики принимаемого сигнала, чтобы можно было должным образом выполнять операцию сжатия. Если временные характеристики принимаемого сигнала не отслеживаются должным образом и последовательность ПСЧ, используемая беспроводным устройством, не выравнивается по времени с последовательностью ПСЧ принимаемого сигнала, то результаты операции сжатия ухудшаются.
Беспроводное устройство в системе МДКРК обычно использует контур управления синхронизацией, который оценивает временные характеристики принимаемого сигнала и соответствующим образом регулирует временные характеристики локально генерируемой последовательности ПСЧ. Когда аналоговые фильтры 122 и 124 и/или цифровые фильтры 150 и 152 регулируются, задержка фильтров обычно изменяется. В результате отфильтрованные сигналы от этих фильтров могут иметь опережение или отставание на величину, равную изменению в задержке (дельте) фильтра. Если дельта задержки достаточно велика, то эффективность будет снижена, пока контур отслеживания времени не скорректирует изменения в синхронизации.
Чтобы избегать нарушения временных характеристик принимаемого сигнала, в тракте передачи сигналов можно обеспечивать регулируемые блоки задержки. Эти блоки задержки могут регулироваться одновременно с фильтрами так, чтобы полная задержка фильтров и блоков задержки поддерживалась приблизительно постоянной, даже когда фильтры регулируются. Тогда отфильтрованные сигналы могли бы представляться стационарными даже после регулирования фильтров. Снижение эффективности, таким образом, снижается до минимума.
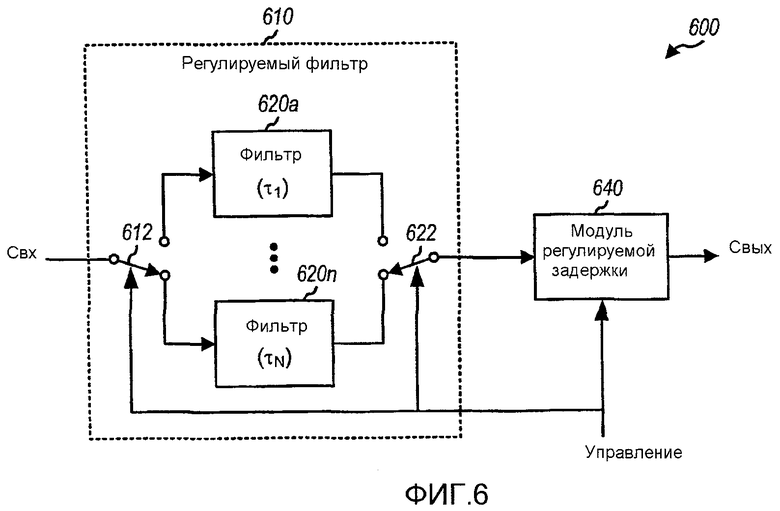
Фиг.6 изображает блок-схему варианта осуществления модуля 600 регулируемых фильтров постоянной задержки. Модуль 600 фильтров включает в себя регулируемый фильтр 610 и регулируемый блок 640 задержки. Регулируемый фильтр 610 включает в себя N фильтров 620a-620n, где N может быть любым целым числом, равным единице или больше (например, N=1, 2, 3 и так далее). Каждый фильтр 620 имеет конкретный частотный отклик (например, ширину полосы пропускания, форму и порядок фильтра) и конкретную задержку (τ). N фильтров 620a-620n имеют разные частотные отклики (например, разные величины ширины полосы пропускания и/или порядка фильтров) и разные задержки τ1-τN соответственно. Один из N фильтров 620a-620n выбирается для использования в какой-либо данный момент с помощью управляющих переключателей 612 и 622. Входной сигнал (Свх) фильтруется выбранным фильтром, и отфильтрованный сигнал передается в регулируемый блок 640 задержки.
Регулируемый блок 640 задержки обеспечивает надлежащую величину задержки таким образом, чтобы полная задержка (τполн) для модуля 600 фильтров была приблизительно постоянной, независимо от того, который из N фильтров 620a-620n выбран для использования. Например, регулируемый блок 640 задержки может обеспечивать задержку, составляющую приблизительно τполн-τ1, если выбран фильтр 620a, задержку, составляющую приблизительно τполн-τ2, если выбран фильтр 620b, и так далее, и задержку, составляющую приблизительно τполн-τN, если выбран фильтр 620n. Как правило, может допускаться небольшая ошибка в полной задержке без ухудшения функциональных характеристик. Таким образом, величина задержки, обеспечиваемая блоком 640 задержки, не должна быть точно равна τполн-τi для фильтра 620i.
В варианте осуществления модуль 600 фильтров может использоваться для каждого из аналоговых фильтров 122 и 124 и/или каждого из цифровых фильтров 150 и 152. В другом варианте осуществления регулируемый фильтр 610 может использоваться для каждого из аналоговых фильтров 122 и 124 и/или каждого из цифровых фильтров 150 и 152. Для этого варианта осуществления регулируемый блок 640 задержки может быть реализован, как отдельный блок в тракте передачи сигналов.
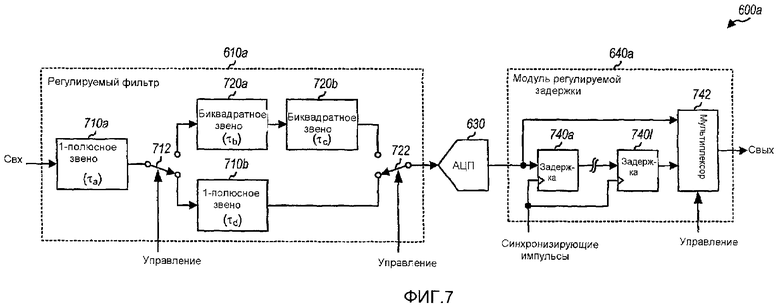
Фиг.7 изображает вариант осуществления модуля 600a регулируемого фильтра постоянной задержки, который реализован с аналоговым регулируемым фильтром 610a и цифровым регулируемым блоком 640a задержки. АЦП 630 (которым может быть АЦП 130 или 132) включен между регулируемым фильтром 610a и регулируемым блоком 640a задержки.
Для варианта осуществления, показанного на фиг.7, регулируемый фильтр 610a включает в себя звенья 710a и 710b однополюсных фильтров и звенья 720a и 720b биквадратных фильтров. Каждое звено 710 однополюсного фильтра реализует один реальный полюс. Каждое звено 720 биквадратного фильтра реализует пару комплексных полюсов. Фильтр 5-го порядка (например, эллиптический, Баттеруорта, Бесселя или Чебышева) может быть реализован с помощью однополюсного звена 710a и биквадратных звеньев 720a и 720b. Фильтр 2-го порядка с двумя реальными полюсами может быть реализован с помощью однополюсных звеньев 710a и 710b. Переключатели 712 и 722 используются для осуществления выбора между фильтром 5-го порядка и фильтром 2-го порядка.
Для варианта осуществления, показанного на фиг.7, регулируемый блок 640 задержки включает в себя L регистров 740a до 7401 и мультиплексор (МТП) 742, где L определяется требуемой величиной задержки и частотой (fсимп) синхронизирующих импульсов, используемыми для регистрирующих устройств 740. Регистры 740a-740l соединены последовательно и запускаются синхронизирующими импульсами (например, синхронизирующими импульсами Chipx8 (элементарный сигнал х 8), которые имеют частоту, в восемь раз превышающую частоту следования элементарных сигналов). Мультиплексор 742 принимает входной сигнал регистра 740a и выходной сигнал регистра 740l и обеспечивает один из этих входных сигналов в качестве выходного сигнала (Sвых).
Фильтр 5-го порядка имеет полную задержку, равную сумме задержек звеньев 710a, 720a и 720b, которые представляют собой τ5-го=τa+τb+τc . Фильтр 2-го порядка имеет полную задержку, равную сумме задержек звеньев 710a и 710b, которые представляют собой τ2-го=τа+τd. Регулируемый блок 640a задержки обеспечивает задержку, составляющую приблизительно τполн-τ5-го (например, 0 нс), когда выбран фильтр 5-го порядка, и задержку, составляющую приблизительно τполн-τ2-го (например, L/fсимп), когда выбран фильтр 2-го порядка.
Фиг.7 изображает вариант осуществления регулируемого фильтра 610 регулируемого блока 640 задержки, показанных на фиг.6. В общем, регулируемый фильтр 610 может быть реализован с помощью аналоговой или цифровой схемы. В случае аналоговой схемы регулируемый фильтр 610 может быть реализован с помощью переключаемых конденсаторов, gm-C и так далее, которые известны в технике. В случае цифровой схемы регулируемый фильтр 610 может быть реализован с помощью фильтра с конечной импульсной характеристикой (КИХ-фильтра) или фильтра с бесконечной импульсной характеристикой (БИХ-фильтра), имеющего частотный отклик (например, ширину полосы пропускания и задержку), который можно регулировать посредством установки коэффициентов фильтра. Точно так же регулируемый блок 640 задержки может быть реализован с помощью аналоговой или цифровой схемы. В случае аналоговой схемы регулируемый блок 640 задержки может быть реализован, как фазовый фильтр с требуемой задержкой, определяемой надлежащим размещением комплексных полюсов. В случае цифровой схемы регулируемый блок 640 задержки может быть реализован с регистрами, как показано на фиг.7. Цифровой фильтр также может быть выполнен с возможностью регулирования ширины полосы пропускания, поддерживая в то же время задержку приблизительно постоянной.
Для ясности, методы фильтрации описаны для беспроводного устройства связи, которое также может упоминаться как мобильная станция, терминал пользователя, сотовый телефон, пользовательское устройство и так далее. Эти методы также могут использоваться для БСПП, которая также может упоминаться как базовая станция и узел доступа, и так далее.
Понятно, что хотя в вышеизложенном описании представлены различные варианты осуществления и преимущества настоящего изобретения, вышеупомянутое раскрытие является только иллюстративным, и могут быть выполнены изменения в деталях, также находящиеся в пределах объема изобретения. Поэтому настоящее изобретение должно быть ограничено только прилагаемой формулой изобретения.





Изобретение относится к технике связи. Технический результат состоит в повышении помехоустойчивости. Для этого в системе используют фильтры управляемой ширины полосы пропускания для фильтрации принимаемого сигнала. Управляющая схема генерирует сигнал управления, чтобы управлять шириной полосы пропускания фильтров. Если интенсивность принимаемого сигнала выше первого порогового значения, то для фильтров может использоваться более широкая полоса пропускания. Если принимаемый сигнал ниже второго порогового значения, то управляющая схема генерирует сигнал управления для настройки фильтров на более узкую полосу пропускания. Ширина полосы пропускания фильтра также изменяется в зависимости от присутствия источника узкополосных радиопомех (преднамеренных радиопомех). Блок регулируемой задержки гарантирует постоянное групповое время задержки между всеми возможными конфигурациями фильтра. 6 н. и 39 з.п. ф-лы, 10 ил.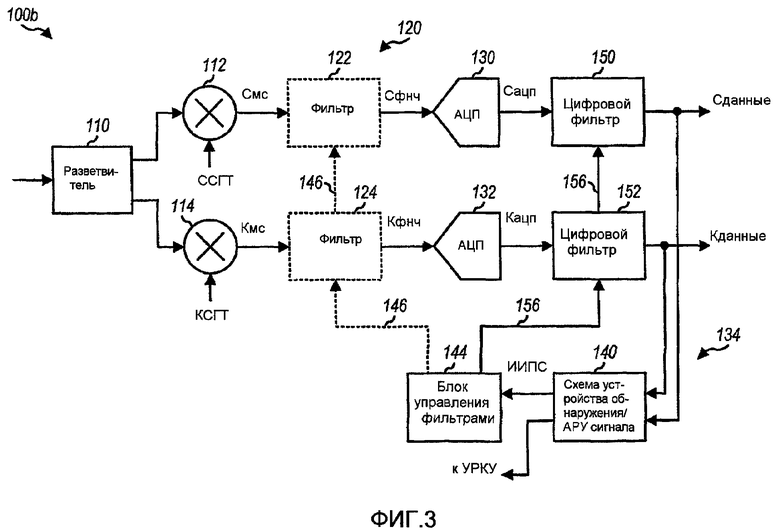
1. Беспроводное устройство приема, содержащее
фильтр, предназначенный для фильтрации сигнала базовой полосы и выдачи отфильтрованного сигнала, причем фильтр имеет регулируемый частотный отклик, основанный, по меньшей мере, частично на интенсивности сигнала для сигнала базовой полосы, и
блок задержки, предназначенный для задержки отфильтрованного сигнала и обеспечения выходного сигнала, причем блок задержки обеспечивает регулируемую задержку, которая регулируется на основе измеренной мощности сигнала базовой полосы, как определено в беспроводном устройстве приема.
2. Беспроводное устройство по п.1, в котором задержка блока задержки регулируется таким образом, чтобы поддерживать приблизительно постоянную полную задержку для фильтра и блока задержки, когда частотный отклик фильтра регулируется.
3. Беспроводное устройство по п.1, в котором частотный отклик фильтра и задержка блока задержки регулируются одновременно, чтобы поддерживать временные характеристики выходного сигнала приблизительно фиксированными, когда фильтр и блок задержки регулируются.
4. Беспроводное устройство по п.1, дополнительно содержащее
радиочастотный (РЧ) модуль, предназначенный для обработки принимаемого сигнала и выдачи сигнала базовой полосы.
5. Беспроводное устройство по п.1, в котором фильтр реализован с помощью аналоговых электрических схем.
6. Беспроводное устройство по п.5, в котором фильтр включает в себя множество звеньев фильтра, причем назначенные одни из звеньев фильтра выбираются для регулирования частотного отклика фильтра.
7. Беспроводное устройство по п.1, в котором фильтр реализован с помощью цифровых электрических схем.
8. Беспроводное устройство по п.7, в котором отклик фильтра регулируется посредством изменения коэффициентов фильтра.
9. Беспроводное устройство по п.1, в котором блок задержки реализован с помощью цифровых электрических схем.
10. Беспроводное устройство по п.9, в котором регулируемая задержка блока задержки имеет разрешение, составляющее один период тактовых импульсов, используемых для блока задержки.
11. Беспроводное устройство по п.1, дополнительно содержащее детектор сигнала, обеспечивающий определение интенсивности принимаемого сигнала, указывающей на интенсивность принимаемого сигнала для беспроводного устройства приема, при этом фильтр, блок задержки или как фильтр, так и блок задержки регулируются на основании интенсивности принимаемого сигнала.
12. Беспроводное устройство по п.11, в котором ширина полосы пропускания фильтра уменьшается, если интенсивность принимаемого сигнала ниже первого порогового значения, и увеличивается, если интенсивность принимаемого сигнала превышает второе пороговое значение.
13. Беспроводное устройство по п.11, в котором интенсивность принимаемого сигнала определяется на основе отфильтрованного сигнала и указывает на интенсивность сигнала компонентов полезного сигнала в пределах выбранного радиочастотного (РЧ) канала.
14. Беспроводное устройство по п.1, дополнительно содержащее
детектор преднамеренных радиопомех, предназначенный для определения интенсивности нежелательного сигнала, указывающей на интенсивность сигнала для компонентов нежелательного сигнала в принимаемом сигнале для беспроводного устройства, при этом фильтр, блок задержки или как фильтр, так и блок задержки регулируются на основании интенсивности нежелательного сигнала.
15. Беспроводное устройство по п.14, в котором детектор преднамеренных радиопомех содержит
фильтр нижних частот, предназначенный для фильтрации принимаемого сигнала и
устройство определения уровня мощности, предназначенное для измерения мощности сигнала базовой полосы выходного сигнала фильтра нижних частот, для получения интенсивности нежелательного сигнала.
16. Беспроводное устройство по п.14, в котором детектор преднамеренных радиопомех содержит
фильтр верхних частот, предназначенный для фильтрации принимаемого сигнала, и
устройство определения уровня мощности, предназначенное для измерения мощности сигнала базовой полосы для выходного сигнала фильтра верхних частот, для получения интенсивности нежелательного сигнала.
17. Беспроводное устройство по п.14, в котором детектор преднамеренных радиопомех содержит
фильтр нижних частот, предназначенный для фильтрации принимаемого сигнала,
фильтр верхних частот, предназначенный для фильтрации принимаемого сигнала, и
устройство определения уровня мощности, предназначенное для измерения мощности сигнала базовой полосы для выходного сигнала фильтра нижних частот и измерения мощности сигнала базовой полосы для выходного сигнала фильтра верхних частот, и
при этом фильтр, блок задержки или как фильтр, так и блок задержки регулируются на основании измеряемой мощности сигнала базовой полосы для выходного сигнала фильтра нижних частот и мощности сигнала базовой полосы для выходного сигнала фильтра верхних частот.
18. Беспроводное устройство по п.14, в котором ширина полосы пропускания фильтра уменьшается, если интенсивность нежелательного сигнала превышает предварительно определенное пороговое значение, и увеличивается, если интенсивность нежелательного сигнала ниже предварительно определенного порогового значения.
19. Беспроводное устройство по п.14, в котором интенсивность нежелательного сигнала указывает на интенсивность сигнала компонентов внеполосного сигнала за пределами выбранного радиочастотного (РЧ) канала.
20. Беспроводное устройство по п.1, дополнительно содержащее
аналого-цифровой преобразователь (АЦП), предназначенный для преобразования в цифровую форму отфильтрованного сигнала и обеспечения выборок, при этом блок задержки предназначен для задержки выборок от АЦП.
21. Беспроводное устройство по п.20, в котором АЦП представляет собой АЦП типа дельта-сигма, имеющий спектрально сформированный шум квантования.
22. Беспроводное устройство по п.1, предназначенное для использования в системе связи множественного доступа с кодовым разделением каналов (CDMA).
23. Способ выполнения фильтрации в системе беспроводной связи, содержащий
фильтрацию сигнала базовой полосы с регулируемым частотным откликом, основанным, по меньшей мере, частично на интенсивности сигнала для сигнала базовой полосы, для получения отфильтрованного сигнала, и
задержку отфильтрованного сигнала с регулируемой задержкой, которая регулируется на основе измеренной мощности сигнала базовой полосы, как определено в беспроводном устройстве приема, для получения выходного сигнала.
24. Способ по п.23, в котором задержка отфильтрованного сигнала содержит задержку отфильтрованного сигнала с регулируемой задержкой для поддерживания приблизительно постоянной полной задержки для выходного сигнала, когда частотный отклик регулируется.
25. Способ по п.23, в котором частотный отклик и задержка регулируются одновременно так, чтобы поддерживать временные характеристики выходного сигнала приблизительно фиксированными.
26. Способ по п.23, дополнительно содержащий обработку принимаемого сигнала для получения сигнала базовой полосы.
27. Способ по п.23, дополнительно содержащий преобразование в цифровую форму отфильтрованного сигнала для получения выборок, причем выборки задерживаются с помощью регулируемой задержки.
28. Способ по п.23, дополнительно содержащий определение интенсивности полезного сигнала, указывающей на интенсивность сигнала компонентов полезного сигнала в принимаемом сигнале, при этом частотный отклик и задержка регулируются на основании интенсивности полезного сигнала.
29. Способ по п.23, дополнительно содержащий определение интенсивности сигнала преднамеренных радиопомех в принимаемом сигнале, при этом частотный отклик и задержка регулируются на основании интенсивности сигнала преднамеренных радиопомех.
30. Устройство приема в системе беспроводной связи, содержащее
средство для фильтрации сигнала базовой полосы с регулируемым откликом, основанным, по меньшей мере, частично на интенсивности сигнала для сигнала базовой полосы, для получения отфильтрованного сигнала, и
средство для задержки отфильтрованного сигнала с регулируемой задержкой, которая регулируется на основе измеренной мощности сигнала базовой полосы, как определено в беспроводном устройстве приема, для получения выходного сигнала.
31. Устройство по п.30, в котором задержка регулируется так, чтобы поддерживать приблизительно постоянную полную задержку для выходного сигнала, когда частотный отклик регулируется.
32. Устройство по п.30, в котором частотный отклик и задержка регулируются одновременно так, чтобы поддерживать временные характеристики выходного сигнала приблизительно фиксированными.
33. Устройство по п.30, дополнительно содержащее средство для обработки принимаемого сигнала для получения сигнала базовой полосы.
34. Устройство по п.30, дополнительно содержащее средство для преобразования в цифровую форму отфильтрованного сигнала для получения выборок, при этом выборки задерживаются с помощью регулируемой задержки.
35. Устройство по п.30, дополнительно содержащее средство для определения интенсивности полезного сигнала, указывающей на интенсивность сигнала компонентов полезного сигнала в принимаемом сигнале, при этом частотный отклик и задержка регулируются на основании интенсивности полезного сигнала.
36. Устройство по п.30, дополнительно содержащее средство для определения интенсивности сигнала преднамеренных радиопомех в принимаемом сигнале, при этом частотный отклик и задержка регулируются на основании интенсивности сигнала преднамеренных радиопомех.
37. Устройство по п.30, предназначенное для использования в системе связи множественного доступа с кодовым разделением каналов (CDMA).
38. Беспроводное устройство приема в системе связи множественного доступа с кодовым разделением каналов (CDMA), содержащее
радиочастотный (РЧ) модуль, предназначенный для обработки принимаемого сигнала и выдачи сигнала базовой полосы,
фильтр, предназначенный для фильтрации сигнала базовой полосы и обеспечения отфильтрованного сигнала, причем фильтр имеет регулируемую ширину полосы пропускания,
детектор, предназначенный для детектирования отфильтрованного сигнала и определения интенсивности полезного сигнала, указывающей на интенсивность сигнала компонентов полезного сигнала в принимаемом сигнале, и
блок управления, предназначенный для регулирования ширины полосы пропускания фильтра до достижения первой ширины полосы пропускания, если интенсивность полезного сигнала выше первого порогового значения, и второй ширины полосы пропускания, которая меньше, чем первая ширина полосы пропускания, если интенсивность полезного сигнала ниже второго порогового значения.
39. Беспроводное устройство по п.38, дополнительно содержащее
аналого-цифровой преобразователь (АЦП), предназначенный для преобразования в цифровую форму отфильтрованного сигнала и обеспечения выборок, причем АЦП имеет спектрально сформированный шум квантования, при этом детектор обеспечивает определение интенсивности полезного сигнала на основании выборок.
40. Беспроводное устройство по п.38, дополнительно содержащее
блок задержки, предназначенный для задержки отфильтрованного сигнала и обеспечения выходного сигнала, причем блок задержки обеспечивает регулируемую задержку, которая регулируется на основе измеренной мощности сигнала базовой полосы, как определено в беспроводном устройстве приема.
41. Беспроводное устройство по п.40, в котором задержка блока задержки регулируется так, чтобы поддерживать приблизительно постоянную полную задержку для фильтра и блока задержки, когда ширина полосы пропускания фильтра регулируется.
42. Способ обработки принимаемого сигнала в беспроводной системе связи, содержащий
обработку принимаемого сигнала для получения сигнала базовой полосы;
фильтрацию сигнала базовой полосы с регулируемой шириной полосы пропускания для получения отфильтрованного сигнала,
детектирование отфильтрованного сигнала для определения интенсивности полезного сигнала, указывающий на интенсивность сигнала для компонентов полезного сигнала в принимаемом сигнале, и
регулирование ширины полосы пропускания фильтра до достижения первой ширины полосы пропускания, если интенсивность полезного сигнала выше первого порогового значения, и второй ширины полосы пропускания, которая меньше, чем первая ширина полосы пропускания, если интенсивность полезного сигнала ниже второго порогового значения.
43. Способ по п.42, дополнительно содержащий задержку отфильтрованного сигнала с регулируемой задержкой, которая регулируется на основе измеренной мощности сигнала базовой полосы, как определено в беспроводном устройстве приема, для получения выходного сигнала,
44. Устройство в системе беспроводной связи, содержащее
средство для обработки принимаемого сигнала для получения сигнала базовой полосы,
средство для фильтрации сигнала базовой полосы с регулируемой шириной полосы пропускания для получения отфильтрованного сигнала,
средство для детектирования отфильтрованного сигнала, для определения интенсивности полезного сигнала, указывающей на интенсивность сигнала компонентов полезного сигнала в принимаемом сигнале, и
средство для регулирования ширины полосы пропускания фильтра до достижения первой ширины полосы пропускания, если интенсивность полезного сигнала выше первого порогового значения, и второй ширины полосы пропускания, которая меньше, чем первая ширина полосы пропускания, если интенсивность полезного сигнала ниже второго порогового значения.
45. Устройство по п.44, дополнительно содержащее
средство для задержки отфильтрованного сигнала с регулируемой задержкой, которая регулируется на основе измеренной мощности сигнала базовой полосы, как определено в беспроводном устройстве приема, для получения выходного сигнала.
| ПРИЕМНИК ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ И ИЗМЕРИТЕЛЬ УРОВНЯ ДЛЯ НЕГО | 1996 |
|
RU2097922C1 |
| RU 96106603 А, 27.07.1998 | |||
| АППАРАТ ПИТАЮЩИЙ КОРМОУБОРОЧНОГО КОМБАЙНА | 2020 |
|
RU2751223C1 |

