Связанные заявки
Настоящая заявка запрашивает приоритет предварительной заявки США №60/364795 от 15 марта 2002 года под названием «Динамическая оценка ширины полосы фильтра пилот-сигнала», включенной в настоящее описание посредством ссылки.
Область техники
Настоящее изобретение относится к области устройств связи. Более конкретно, изобретение касается восстановления сигнала связи.
Описание предшествующего уровня техники
Системы связи, которые подвержены сдвигам частоты и помехам, обусловленным многолучевым распространением сигнала, могут использовать пилот-сигналы наряду с информационными сигналами, причем пилот-сигнал в значительной степени используется как опорный сигнал для достижения точной демодуляции информации. Мобильные устройства, в частности, могут подвергаться влиянию частотных или фазовых сдвигов, обусловленных допплеровскими эффектами, замирания и помех многолучевого распространения, и тогда прогнозируемый пилот-сигнал может служить для упрощения интерпретации сигнала, принятого в присутствии таких эффектов. Соответственно, пилот-сигналы могут сопровождать первичные информационные сигналы во многих системах связи, особенно в системах мобильной связи, и, в частности, в тех системах, где используются широкополосные технологии передачи множественного доступа с кодовым разделением (CDMA).
Система CDMA может быть спроектирована таким образом, чтобы поддерживать один или более стандартов CDMA, таких как (1) стандарт Ассоциации промышленности средств связи/Ассоциации электронной промышленности (TIA-EIA) "Стандарт совместимости мобильных и базовых станций для двухрежимной широкополосной системы сотовой связи с расширенным спектром TIA/EIA-95" (стандарт IS-95), (2) стандарт, предложенный консорциумом под названием «Проект партнерства по 3-му поколению» (3GPP) и воплощенный в ряде документов, включая Документы 3G TS 25,211, 3G TS 25,212, 3G TS 25,213 и 3G TS 25,214 (стандарт W-CDMA), (3) стандарт, предложенный консорциумом, названным «Проект партнерства по 3-му поколению - 2» (3GPP2) и воплощенный в ряде документов, включая «С.S0002 - Стандарт физического уровня для систем cdma2000 c расширенным спектром», «С.S0005 - стандарт сигнализации верхнего уровня (уровня 3) для систем cdma2000 с расширенным спектром» и «С.S0024 - спецификация интерфейса радиосвязи для высокоскоростной передачи пакетов данных в cdma2000» (стандарт CDMA2000) и (4) некоторые другие стандарты. Пилот-сигнал может, например, использоваться в каждой из описанных систем стандарта CDMA как фазовый опорный сигнал для демодуляции сигнала трафика или сигнала данных.
Однако, когда сам пилот-сигнал подвергается значительному зашумлению, которое может быть обусловлено такими факторами, как замирание, помехи многолучевого распространения или потери мощности сигнала, возможность точного определения временных параметров пилот-сигнала значительно ухудшается, снижая его функциональность. В условиях, когда приемник перемещается с высокой скоростью относительно передатчика, или в условиях низкого отношения сигнала к шуму (SNR) ширина полосы и амплитуда пилот-сигнала могут чрезмерно меняться по сравнению с номинальными значениями. В условиях высоких скоростей доплеровские эффекты могут обусловить расширение полосы пилот-сигнала за пределы полосы фильтра, что приведет к потере части сигнала. Потеря части пилот-сигнала ухудшает рабочие характеристики приемника. Таким образом, для того чтобы более эффективно использовать пилот-сигналы при восстановлении информационных сигналов, существует потребность в усовершенствованиях для улучшения селекции пилот-сигналов в присутствии шума и других искажений.
Сущность изобретения
Раскрыты способ и устройство, в которых принимается пилот-сигнал и оценивается ширина полосы пилот-сигнала и на основании этой информации настраивается ширина полосы фильтра пилот-сигнала. Ширина полосы пилот-сигнала может быть оценена путем сравнения мощности пилот-сигнала в двух или более различных частотных диапазонах. Два или более различных частотных диапазона, в которых оценивается мощность пилот-сигнала, могут быть установлены, по меньшей мере, тремя способами. По первому способу эти частотные диапазоны могут перекрываться друг с другом. Например, первый частотный диапазон H1 может представлять собой диапазон нижних частот, определенный от 0 Гц до некоторой частоты отсечки, в то время как второй частотный диапазон Н2 простирается от 0 Гц до частоты отсечки, превышающей соответствующую частоту диапазона Н1, так, что частотный диапазон Н2 включает в себя диапазон Н1. По второму способу частотные диапазоны могут по существу не перекрываться, например, когда диапазон Н1 простирается от 0 Гц до первой частоты, а диапазон Н2 определяет полосу частот, которая начинается и заканчивается на частоте, более высокой, чем частота отсечки диапазона Н1. По третьему способу частотные диапазоны могут быть установлены путем аппроксимации преобразования Фурье источника пилот-сигнала на двух или более частотах путем выполнения корреляций источника пилот-сигнала с двумя или более выбранными сигналами, имеющими различные частоты.
В каждом случае величина сигнала в двух или более частотных полосах определяется, как правило, оценкой сигнала с точки зрения его мощности. Величина шума, а именно его мощность на единичную ширину полосы, может также быть оценена путем взятия выборок пилот-сигнала источника в частотном диапазоне, который с определенностью находится вне полосы пилот-сигнала, и определенная таким образом величина шума может быть вычтена из величины исходного (необработанного) сигнала, наблюдаемой в этих двух или более частотных полосах с целью получения более точной оценки величины только пилот-сигнала в пределах этих двух диапазонов. Затем отношение величины чистого сигнала в этих двух или более полосах будет использоваться для более точного выбора фильтра, который должен применяться к источнику пилот-сигнала для формирования фильтра пилот-сигнала. Оценивая большее количество частотных полос или точек, можно более точно определить подходящую ширину полосы фильтра, используемого для выделения пилот-сигнала.
Краткое описание чертежей
Признаки, задачи и преимущества настоящего изобретения поясняются в изложенном ниже подробном описании, иллюстрируемом чертежами, на которых одинаковые ссылочные позиции обозначают соответствующие элементы на всех чертежах.
Фиг.1 - мобильное устройство для приема пилот-сигнала вместе с передаваемым по каналу сигналом.
Фиг.2 - оценка полосы пилот-сигнала с использованием неперекрывающихся сигналов.
Фиг.3 - оценка полосы пилот-сигнала с использованием перекрывающихся фильтров.
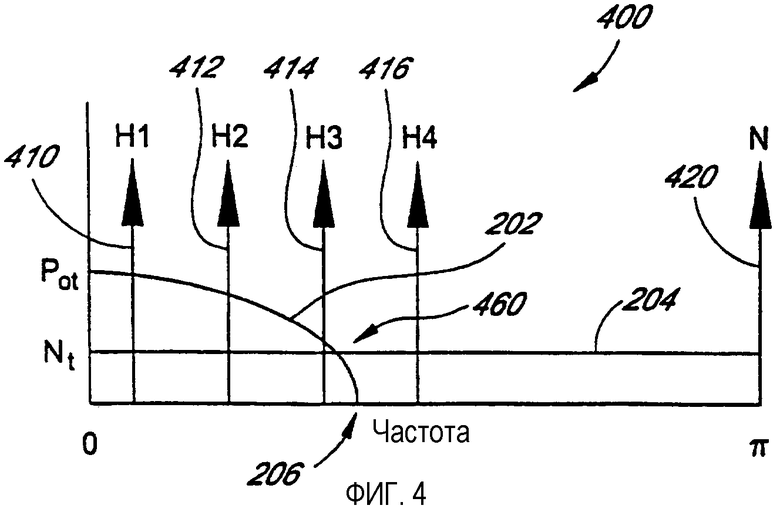
Фиг.4 - оценка полосы пилот-сигнала с использованием корреляций между сигналом и множеством различных гармоник.
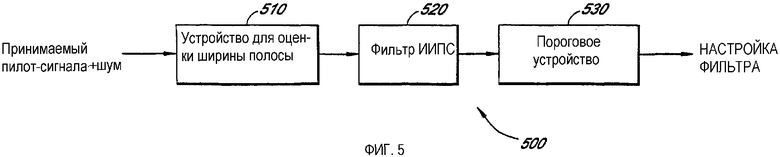
Фиг.5 - функциональная схема варианта осуществления настройки фильтра пилот-сигнала.
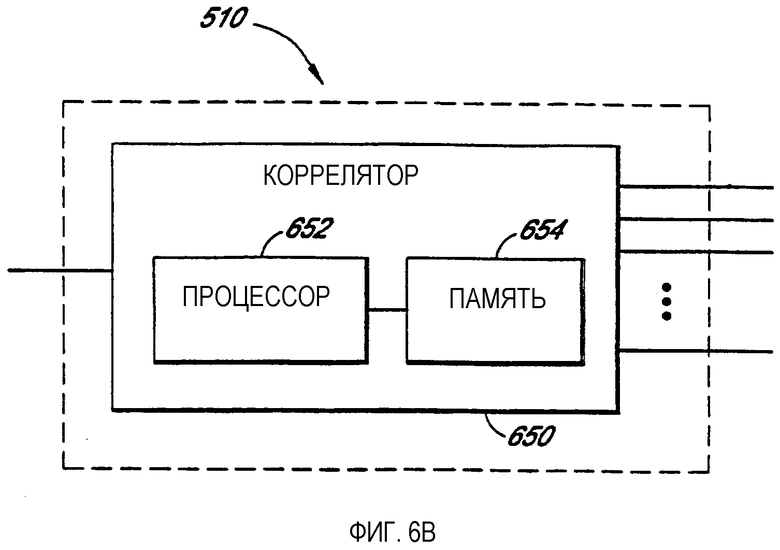
Фиг.6А-6В - функциональные схемы вариантов осуществления блоков оценки полосы.
Подробное описание вариантов осуществления изобретения
Аспекты, признаки и преимущества настоящего изобретения поясняются в последующем подробном описании, иллюстрируемом чертежами. Эти чертежи и связанное с ними описание предоставляются для иллюстрации вариантов осуществления изобретения, но не для ограничения объема изобретения.
Следующее подробное описание направлено на определенные конкретные варианты осуществления изобретения. Однако изобретение может быть реализовано множеством различных путей, как определено и представлено в формуле изобретения. Поэтому объем изобретения должен определяться со ссылкой на формулу изобретения и, в частности, не должен ограничиваться описанными вариантами осуществления.
Для того чтобы улучшить возможность разрешения пилот-сигналов, входящий пилот-сигнал подвергается фильтрации для уменьшения внеполосного шума. Однако полоса пилот-сигнала меняется в функции от доплеровских эффектов, замирания и эффектов многолучевого распространения. По мере изменения полосы пилот-сигнала эффективность фильтра фиксированной частоты также изменяется. По существу, фильтр пилот-сигнала можно сделать более эффективным, если подстраивать его частоту для согласования с текущей полосой пилот-сигнала. Для осуществления этого производится оценка полосы пилот-сигнала и на основе этой информации настраивается фильтр пилот-сигнала.
Вообще величина пилот-сигнала измеряется для двух или более различных частотных диапазонов. Чтобы улучшить качество оценок величины сигнала, можно также проводить и использовать оценку уровня шума для шума, который не зависит от пилот-сигнала. Оценки величины сигнала могут быть основаны, например, на мощности сигнала или на амплитуде сигнала. Частотная характеристика фильтра пилот-сигнала меняется в зависимости от соотношения величин пилот-сигнала в двух или более диапазонах.
Фиг.1 представляет функциональную схему приемника 100, характерную для использования в радиотелефонах, работающих по технологии CDMA в системах связи, соответствующих стандартам IS-95 или CDMA 2000. Приемник 100 может представлять половину приемопередатчика.
Сигнал, который может включать в себя пилот-сигнал, модулируется в передатчике в соответствии с определенными стандартами сигналов и затем передается в приемник 200. Антенна 102 на входе приемника 100 обеспечивает сопряжение приемника 100 с каналом беспроводной связи. Принятый сигнал на выходе антенны 102 направляется в радиочастотный (РЧ) аналоговый блок 110. РЧ/аналоговый блок 110 обычно используется для настройки приемника 100 на конкретную выделенную полосу частот, преобразования принятого сигнала в сигнал с более низкой частотой, фильтрации сигнала и усиления сигнала. Выходным сигналом РЧ/аналогового блока 110 является аналоговый сигнал на низкой промежуточной частоте (ПЧ) или в полосе модулирующих сигналов. Если принятый сигнал модулирован с помощью квадратурной фазовой манипуляции (QPSK), то на выходе РЧ/аналогового блока 110 может быть синфазный сигнал (I) и квадратурный (Q) сигнал. Обработанный аналоговый сигнал затем направляется в аналого-цифровой преобразователь (АЦП) 112, в котором сигнал дискретизируется и преобразуется в цифровую форму.
Принятый сигнал в цифровой форме затем направляется в демодулятор 120 СДМА, где из принятого сигнала устраняется расширение спектра, обусловленное прямой модуляцией последовательностью. Демодулятор CDMA может представлять собой функциональный блок, в котором может происходить восстановление пилот-сигнала. В системах стандартов IS-95 или CDMA 2000 пилот-сигнал представляет собой битовый поток из нулей, который расширен по спектру нулевым кодом Уолша. Кодовые элементы пилот-сигнала кодируются короткими псевдошумовыми (ПШ) последовательностями, используемыми для отделения одной ячейки или сектора от другой. Такое смещение позволяет повторно использовать коды Уолша в каждом секторе. Корреляция с ПШ- последовательностями, используемая для кодирования пилот-сигнала, позволяет восстановить фазу пилот-сигнала.
Полученные в результате сжатые символы подаются на обращенный перемежитель 130. Переданный сигнал может подвергаться перемежению для того, чтобы уменьшить влияние пакета ошибок, обусловленных, например, быстрым замиранием сигнала из-за деструктивно-комбинируемых многолучевых составляющих во входном каскаде приемника. Перемежение символов перед подачей и обращенное перемежение после приема обуславливает то, что пакеты ошибок растягиваются во времени и появляются в декодере так, как если бы они были случайными ошибками. Обращенный перемежитель 130 выполняет блочное обращенное перемежение принятых символов для перегруппировки символов в том порядке, в котором они были до их перемежения в передатчике. Символы, подвергнутые обращенному перемежению, затем подаются на вход декодера 140.
Символы декодируются способом, согласующимся с процессом кодирования, который используется в передатчике. Различные каналы в линии связи могут использовать различные типы Прямого Исправления Ошибок (ПИО). Некоторые каналы могут использовать различные типы ПИО в зависимости от конкретной конфигурации радиосистемы. Например, символы могут подвергаться сверточному кодированию или турбокодированию в зависимости от поддерживаемой конфигурации радиосвязи.
Приемник 100 может реализовывать сверточный декодер, такой как декодер Витерби, в качестве декодера 140, когда символы подвергаются сверточному кодированию, а также приемник 100 может реализовывать турбодекодер в качестве декодера 140, когда символы подвергаются турбокодированию. Декодированные биты на выходе из декодера 140 могут также содержать индикаторы качества сигнала, такие как биты контроля четности или биты контроля циклическим избыточностным кодом (CRC). Выходной сигнал декодера 140 может быть подан в каскады дополнительной обработки или в соответствующее место назначения, например в регистр управления или на пользовательский интерфейс. Последующие каскады не показаны на Фиг.1 с целью большей ясности.
Каждый из каскадов приемника 100 может быть оперативно связан с процессором 180. Процессор может взаимодействовать с блоком памяти 190 и получать от него команды. Процессор может управлять, способствовать выполнению или выполнять некоторые задачи приемника. Кроме того, процессор 180 может передавать результаты от одной функции к другой функции в приемнике.
Так как шум снижает точность разрешения пилот-сигнала, для ограничения полосы шума в принятом сигнале может использоваться фильтр пилот-сигнала. Фильтр пилот-сигнала, имеющий полосу намного шире, чем полоса пилот-сигнала, имеет соответствующую шумовую полосу, которая не оптимизирована. Излишне широкая шумовая полоса фильтра пилот-сигнала уменьшает отношение сигнал/шум для принятого пилот-сигнала. Когда канал связи работает в условиях низкого отношения сигнал/шум, излишняя шумовая полоса может существенно ухудшить способность приемника восстанавливать пилот-сигнал.
Фильтр пилот-сигнала не должен иметь полосу, которая значительно меньше полосы пилот-сигнала, потому что тогда части пилот-сигнала могут ослабляться фильтром. Узкополосный фильтр пилот-сигнала может привести к потери части пилот-сигнала и замедленной реакции на условия быстрого замирания.
Фильтр пилот-сигнала может быть реализован в аналоговой форме перед АЦП или может быть реализован как цифровой фильтр после АЦП. Когда фильтр пилот-сигнала реализован как цифровой фильтр, этот фильтр пилот-сигнала не требует больших вычислений и не вызывает ошибок, связанных с фазовыми задержками. Один из способов достичь этого состоит в использовании однополюсного фильтра с бесконечной импульсной характеристикой (БИХ, IIR). Распознанный пилот-сигнал может затем использоваться для настройки информации в канальном сигнале. Фильтр пилот-сигнала может иметь любую форму и может быть, например, однополюсным или двухполюсным фильтром, фильтром с бесконечной импульсной характеристикой (БИХ) или фильтром с конечной импульсной характеристикой (КИХ, FIR), если пилот-сигнал дискретизируется и система является цифровой.
Множество факторов, таких как допплеровский сдвиг, многолучевое распространение или эффекты замирания, могут вызывать изменение полосы пилот-сигнала. Когда это происходит, ранее оптимальный фильтр пилот-сигнала будет либо пропускать слишком много шума, либо начнет «срезать» результирующий пилот-сигнал. Следовательно, желательно динамически изменять параметры фильтра пилот-сигнала в соответствии с полосой принимаемого пилот-сигнала. Фиг.2 представляет первый способ обработки принимаемого пилот-сигнала для извлечения информации о пилот-сигнале с тем, чтобы выбрать подходящие параметры для фильтра пилот-сигнала. Принятый канальный сигнал представлен как включающий в себя пилот-сигнал 202 и шумовой сигнал 204. Первый фильтр H1 210, имеющий соответствующую первую функцию преобразования, представляет характеристики первого фильтра оценки полосы. На Фиг.2 фильтр H1 210 представлен как фильтр нижних частот, имеющий частоту 208 среза значительно ниже максимальной частоты 206 пилот-сигнала 202. Очевидно, что можно также использовать другую форму фильтра. Первый фильтр 210 пропускает соответствующую первую часть пилот-сигнала, а также связанный с ним шум в пределах полосы пропускания фильтра 210.
Второй фильтр H2 220, имеющий соответствующую вторую передаточную функцию, представляет характеристики второго фильтра оценки полосы. Передаточная функция второго фильтра 220 показана на Фиг.2 как характеристика полосового фильтра, хотя некоторые другие формы фильтра также могут быть использованы. Второй фильтр 220 пропускает соответствующую вторую часть пилот-сигнала. На Фиг.2 полоса пропускания первого фильтра H1 210, показана как не перекрывающаяся с полосой пропускания второго фильтра H2 220. В частном случае полоса пропускания фильтра может быть выбрана на такой частоте, на которой передаточная функция обуславливает затухание сигналов на определенную величину относительно частоты полосы пропускания. Типовая полоса пропускания фильтра определяется частотой на уровне -3 дБ, хотя полоса пропускания может быть определена также по частоте на уровне -6 дБ, -10 дБ или по любой другой частоте, соответствующей уровню ослабления. Кроме того, передаточные функции первого фильтра 210 и второго фильтра 220 характеризуются относительной равномерностью в полосе пропускания и идентичными амплитудами в полосе пропускания. Следует иметь в виду, что относительная равномерность в полосе пропускания не является необходимой и что первый фильтр 210 и второй фильтр 220 не обязательно должны иметь идентичные характеристики полос пропускания. Другими словами, первый фильтр 210 в сравнении со вторым фильтром 220 может иметь большее, меньшее или такое же ослабление в полосе пропускания. Кроме того, фильтры могут, но необязательно, иметь симметричные передаточные функции.
Шумовой фильтр N 230, имеющий соответствующую передаточную функцию, используется как фильтр для оценки уровня шума. Фиг.2 демонстрирует, что по своей передаточной функции шумовой фильтр 230 является фильтром верхних частот, хотя ясно, что могут быть использованы и другие виды фильтра. Хотя шумовой фильтр 230 может быть выполнен как фильтр верхних частот, следует иметь в виду, что полоса шума принимаемого сигнала может быть ограничена дополнительными элементами (не показанными) так, что мощность шума, пропущенная фильтром верхних частот, будет ограничена. Передаточная функция шумового фильтра 230 предпочтительно выбирается вне полосы пилот-сигнала 202. В случае, показанном на Фиг.2, «вне полосы» означает «выше» частоты пилот-сигнала, но в других обстоятельствах пилот-сигнал может не быть центрован на 0 Гц и тогда фильтр шумовой полосы может быть расположен в любом месте. Частотная характеристика шумового фильтра 230 выбирается так, чтобы сигнал, прошедший шумовой фильтр 230, представлял сигнал, на основе которого можно получить оценку шума в каждом из фильтров оценки полосы пилот-сигнала. Оценку шума можно получить с помощью полосового фильтра с возможным перекрытием незначительных частей других сигналов, включая пилот-сигнал или другие известные сигналы, которые можно предсказуемо удалить для получения оценки шума.
Таким образом, как следует из вида спектра, представленного на Фиг.2, принимаемый пилот-сигнал фильтруется каждым из фильтров: первым фильтром 210, вторым фильтром 220 и шумовым фильтром 230. После фильтрации производится определение составляющей пилот-сигнала на выходе каждого из фильтров оценки полосы пилот-сигнала. Определение шумовой составляющей производится на выходе шумового фильтра 230.
Составляющая пилот-сигнала может быть определена хорошо известными методами, такими как оценка мощности сигнала на единичную ширину полосы. Такой же тип оценки можно выполнить на выходе шумового фильтра N 230. В одном из вариантов воплощения изобретения фильтры оценки полосы пилот-сигнала и шумовой фильтр являются аналоговыми фильтрами, и соответствующие составляющие определяются путем использования индикации интенсивности принятого сигнала (ИИПС - RSSI). ИИПС можно, например, определить с помощью диодного детектора. Так, ИИПС может быть определена для выхода первого фильтра 210, чтобы получить оценку интенсивности пилот-сигнала и шума в пределах полосы первого фильтра 210. Подобным же образом ИСПС на выходе второго фильтра 220 дает оценку интенсивности пилот-сигнала и шума в пределах полосы второго фильтра 220. ИСПС на выходе шумового фильтра 230 дает оценку интенсивности шума в пределах полосы шумового фильтра 230.
Если первый фильтр 210, второй фильтр 220 или шумовой фильтр 230 выполнены в цифровом варианте, соответствующие сигнальные или шумовая составляющие могут быть определены цифровым способом. Цифровые фильтры могут быть с конечной импульсной характеристикой (КИХ), или бесконечной импульсной характеристикой (БИХ), или другими типами цифровых фильтров. Для КИХ-фильтров или БИХ-фильтров порядок фильтра может быть два или менее, чтобы облегчить реализацию с использованием программно-аппаратных средств. Однако может быть использован любой порядок фильтра, если отсутствуют сопоставимые конструктивные ограничения.
ИИПС можно определить цифровым способом путем определения мощности сигнала, пропущенного фильтром. Когда аппаратура выполняется в виде системы, которая функционирует в соответствии со стандартами IS-95 или CDMA 2000, сигналы от каждого из фильтров могут быть синфазным (I) и квадратурным (Q) сигналами. Квадратурные сигналы могут суммироваться, возводиться в квадрат и затем отфильтровываться для получения оценки мощности для ИИПС. Альтернативный вариант состоит в определении энергии сигнала вычислением квадрата амплитуд сигнала и накоплением квадратичных значений за предопределенный период времени. В другом варианте величина отфильтрованного сигнала может быть определена взятием абсолютного значения амплитуд отфильтрованного сигнала и накоплением этих величин за предопределенный период времени. Как правило, один и тот же метод используется для определения ИИПС составляющих пилот-сигнала и для определения ИИПС шумовых составляющих. Использование для составляющих пилот-сигнала и составляющих шума одного и того же метода позволяет гарантировать, что любые статистические отклонения, внесенные в значение ИИПС вследствие использованного метода определения ИИПС, будут одинаковы для сигнала и для шума.
Далее, определенная величина первой отфильтрованной составляющей пилот-сигнала может сравниваться с величиной второй отфильтрованной составляющей пилот-сигнала. Чтобы увеличить степень достоверности, с которой определенные величины соответствуют принятому пилот-сигналу 202, полученная величина шумового сигнала может вычитаться из величин отфильтрованных сигналов перед их сравнением. Один из способов определения и сравнения величин состоит в вычислении значений, пропорциональных мощности на единицу полосы различных сигналов. Однако другие методы определения и сравнения величин сигналов также могут использоваться для достижения того же результата по определению полосы принимаемого пилот-сигнала 202.
Таким образом, в одном из вариантов воплощения ИИПС от шумового фильтра 230 масштабируется так, чтобы получить оценку мощности шума как в первом фильтре 210, так и во втором фильтре 220. Например, предположим, что полоса первого фильтра 210 на двадцать процентов (20%) уже, чем полоса шумового фильтра 230. Значение ИИПС шумового фильтра 230 может масштабироваться с коэффициентом 1/(1,20), чтобы получить оценку мощности шума в полосе первого фильтра. Значение ИИПС шумового фильтра 230 может масштабироваться подобным же образом, чтобы соответствовать полосе второго фильтра 220.
Пороговая функция G(f) может быть определена как отношение откорректированной величины ИИПС на выходе первого фильтра 210 к откорректированной величине ИИПС на выходе второго фильтра 220. То есть функцию G(f) можно определить как:

В приведенном примере уравнения для G(f) RSSI (H2) представляет значение ИИПС, определенное на выходе второго фильтра H2 220. Подобным же образом RSSI (H1) представляет значение ИИПС, определенное на выходе первого фильтра H1 210, и RSSI (N) представляет значение ИИПС, определенное на выходе шумового фильтра N 230. Если полосы первого фильтра 210 и второго фильтра 220 отличаются от полосы шумового фильтра 230, RSSI (N) может представлять масштабированное значение мощности шума. В вышеприведенном примере более высокое значение G(f) указывает на большую полосу пилот-сигнала, что указывает на необходимость использовать более широкую полосу фильтра пилот-сигнала. Меньшее значение G(f) указывает на более узкую полосу пилот-сигнала, и более узкая полоса фильтра пилот-сигнала может использоваться для улучшения рабочих характеристик системы путем минимизации мощности внутриполосного шума. Полоса фильтра пилот-сигнала может обновляться при каждом вычислении значения функции G(f) или по другому заранее определенному графику. В системе связи, работающей в соответствии со стандартами IS-95 или CDMA 2000, полоса фильтра пилот-сигнала может обновляться на основе каждого кадра. Так, при выполнении согласно стандартам IS-95 или CDMA 2000 полоса фильтра пилот-сигнала может обновляться каждые 20 мс. Таким образом производится оценка полосы принимаемого пилот-сигнала каждый раз, когда принимается сигнал, и полоса фильтра пилот-сигнала настраивается на основе оценки. Таким образом, полоса фильтра пилот-сигнала меняется практически в режиме реального времени.
В одном варианте осуществления выходное значение функции G(f) может сравниваться с предопределенной постоянной величиной порога так, что полоса фильтра пилот-сигнала меняется в зависимости от того, выше или ниже этого порога значение G(f). В альтернативном варианте воплощения может использоваться ряд предопределенных пороговых значений и полоса фильтра пилот-сигнала меняется в зависимости от того, в промежуток между какими пороговыми значениями попадает значение функции G(f). В еще другом варианте воплощения полоса фильтра пилот-сигнала меняется непрерывно в зависимости от значения G(f).
Полоса аналогового фильтра может настраиваться путем изменения значений компонент элементов фильтра. Например, для изменения значений емкости и, следовательно, полосы фильтра может использоваться параметрический диод. Управляющее напряжение параметрического диода может меняться дискретными шагами или непрерывно. Полоса цифрового фильтра может изменяться путем изменения коэффициентов фильтра. Коэффициенты фильтра могут меняться в соответствии с предопределенными дискретными значениями или коэффициенты фильтра могут меняться с приращениями, таким образом обеспечивая практически непрерывные изменения полосы фильтра.
Вариант воплощения, представленный на Фиг.2, не ограничивается двумя фильтрами оценки полосы пилот-сигнала. Дополнительные фильтры могут также быть введены для получения более точной оценки распределения мощности принятого пилот-сигнала как функции частоты. Когда используются более двух фильтров для оценки полосы пилот-сигнала, то могут использоваться как единственная функция G(f), так и множество функций G(f). Может быть реализовано множество функций G(f), каждая из которых имеет независимые пороги, и для сравнения различных значений функции G(f) с соответствующими пороговыми значениями может быть создано дерево сравнений с порогами. Результаты сравнений могут затем использоваться для определения желательной полосы пилот-сигнала. Как отмечено ранее, если фильтр пилот-сигнала выполнен в цифровом варианте как БИХ-фильтр, то результаты различных значений функции G(f) могут быть использованы для определения одного или более коэффициентов БИХ-фильтра.
Фиг.3 представляет пример частотного спектра 300 для варианта воплощения, который является видоизменением варианта воплощения по Фиг.2. Первый фильтр H1 301 оценки полосы, имеющий первую передаточную функцию, выполнен как фильтр нижних частот подобно приведенному на Фиг.2. Второй фильтр H2 320 оценки полосы имеет низкочастотную характеристику, отображенную на Фиг.3, а не полосовую характеристику, изображенную на Фиг.2. Поскольку как первый фильтр H1 310 оценки полосы, так и второй фильтр H2 320 оценки полосы являются фильтрами нижних частот, полоса фильтра H2 320 заключает в себе полосу фильтра H1 310. В варианте, иллюстрируемом Фиг.3, фильтры H1 310 и H2 320 могут быть выбраны со значительно перекрывающимися полосами. Хотя частотные характеристики обоих фильтров H1 310 и H2 320, как показано выше, имеют различающиеся амплитуды, существенно, что характеристики полосы пропускания фильтров могут быть выбраны одинаковыми или различающимися. Шумовой фильтр 330 реализован вне ожидаемой полосы принимаемого пилот-сигнала 202 для того, чтобы обеспечить оценку мощности принятого шумового сигнала.
Ясно, что сигналы от различных фильтров, как существенно перекрывающихся, так и не перекрывающихся по полосам, могут быть использованы для восстановления формы пилот-сигнала 202 для того, чтобы лучше выбрать параметры фильтра пилот-сигнала. В зависимости от ожидаемого спектра пилот-сигнала 202 могут быть подходящими различные комбинации фильтров: два фильтра нижних частот, два полосовых фильтра, фильтр верхних частот и полосовой фильтр.
Величина составляющей принимаемого пилот-сигнала на выходе из каждого фильтра оценки полосы H1 320 и H2 320 может быть определена способом, описанным выше со ссылкой на Фиг.2. Величины составляющих пилот-сигнала могут быть выделены более точно путем настройки оценок этих величин таким образом, чтобы компенсировать вклад шумового сигнала 204, рассчитанного на основе оценки, полученной от шумового фильтра 330. Сравнение величин пилот-сигнала в пределах полос фильтров H1 320 и H2 320, с компенсацией шумов или без нее, может включать вычитание величины, полученной от H1, из величины, полученной от H2.
Как описано в связи с вариантом воплощения, представленным на Фиг.2, независимо от метода фильтрации и метода, используемого для определения величин, сравнение двух или более величин может быть представлено в функции G(f). Функция G(f) может, например, представлять простое отношение величин, отношение величин с учетом компенсации шумов или более сложную функцию величин. В любом из этих случаев пороговое значение или ряд пороговых значений могут быть вычислены или определены эмпирическим путем, и параметры фильтра пилот-сигнала могут динамически изменяться в зависимости от того, превышает ли G(f) определенное пороговое значение или нет. G(f) может также определяться более сложным сравнением величин более чем двух сигналов. В случае сравнения трех сигналов, например, G(f) может представлять отношение перепада между второй и третьей величинами к перепаду между первой и второй величинами. Множество характеризующих сигнал величин могут сравниваться различными способами для получения значения G(f). Подобным же образом множество методов от вычисления до таблицы перекодировки могут использоваться для динамического изменения параметров фильтра пилот-сигнала в зависимости от значения G(f). Функция G(f) может быть выведена на основе комбинированных результатов двух или более последовательных измерений. Значения различных величин могут быть определены из последовательных выборок принимаемого пилот-сигнала или из одной выборки.
Фиг.4 представляет пример частотного спектра другого варианта воплощения. Вариант воплощения, показанный на Фиг.4, подобен варианту по Фиг.2. Множество по существу неперекрывающихся фильтров используются для оценки полосы принимаемого пилот-сигнала 202 в присутствии шума 204. Однако блоки H1...H4 являются корреляторами вместо фильтров. Каждый из фильтров H1 410, H2 412, H3 414, H4 416 и N 420 представляет собой коррелятор накопления и сохранения. Корреляторы накопления и сохранения могут функционировать путем использования цифрового процессора сигналов (ЦПС; DSP). Фильтрация реализуется путем определения степени корреляции принятого пилот-сигнала 202 и шума с сигналом, таким как синусоида, на требуемой центральной частоте.
Каждый из фильтров H1 410, H2 412, H3 414, H4 416 и N 420 реализуется в результате определения корреляции принятого пилот-сигнала 202 и шума 204 с циклически изменяющейся экспонентой на центральной частоте фильтров H1, H2, H3, H4 и N соответственно. Другие методы фильтрации также могут использоваться для получения того, что может представлять собой последовательность сравнительно узких полос пропускания или по существу быть подобным Фурье-преобразованиям сигнала на частотах, представляющих интерес. Корреляторы накопления и сохранения могут быть КИХ-фильтрами высокого порядка с функциональной зависимостью sinc((sin x)/x), имеющими узкие полосы пропускания.
Можно контролировать изменения полосы пилот-сигнала 202 посредством измерения интенсивности сигнала на нескольких заранее определенных частотах, например, используя H1-H4, с возможной компенсацией интенсивности шумового сигнала, полученной из N4. Однако корреляционный вариант может также быть использован для оценки только пары частотных полос, как представлено на Фиг.2. Можно определить частоту 460, на которой мощность пилот-сигнала 202 приблизительно равна мощности шумового сигнала. Параметры фильтра пилот-сигнала могут быть настроены таким образом, что частота среза устанавливается около определенной частоты 460.
Принятый сигнал можно представить серией выборок Pot (n) на частоте выборки fs. Сигналы фильтров от H1 410 до H4 416 и N 420 соответствуют корреляции между принятым сигналом и циклически изменяющейся экспонентой на подходящей угловой частоте ω. Каждый сигнал Hk (например, H1, H2, ...) или N можно определить как:

Можно видеть, что уравнение 2 представляет собой дискретное преобразование Фурье. Таким образом, можно видеть, что ширина полосы корреляторов может варьироваться путем настройки интервала L накопления. Результатом является коррелятор накопления и ослабления, т.е. КИХ-фильтр порядка L. Для получения хорошей оценки L должно быть равно, по меньшей мере, 2 или предпочтительно 3, или более. Для уменьшения объема вычислений расчеты можно упростить следующим способом. Можно показать, что

где М можно определить как комплексную матрицу.

Сравнивая уравнение 3 с уравнением 2, получим Δ=ω/fS и ω - угловая частота выбранного сигнала Hk (H1, H2 и т.д. или N). Для каждой суммы можно определить величину для n=0 и затем можно определить последовательные значения (когда n=1, 2, ...) умножением предшествующего значения на постоянную комплексную величину М. Когда вычисление выполняется с использованием цифровой обработки сигналов, значения cos(Δ) и sin(Δ) могут быть предварительно определены и сохранены в памяти и комплексные вычисления могут быть выполнены в регистрах, предназначенных для хранения реальной или мнимой частей при вычислениях комплексных величин.
Величины составляющей пилот-сигнала в пределах каждого фильтра можно определить после корреляции. Затем результирующие значения могут направляться для вычисления соответствующим образом определенной функции G(f), как это было сделано в варианте по Фиг.2. Выходное значение функции G(f) может затем сравниваться с соответствующим порогом для определения коэффициента фильтра пилот-сигнала или для изменения иным способом полосы фильтра пилот-сигнала.
Если полоса фильтра пилот-сигнала обновляется для каждого блока информации канального уровня, то вполне достаточно времени для вычислений корреляции и использования КИХ-фильтров высокого порядка с функцией sinc и узкой полосой. Фильтры более высокого порядка позволяют получить точную оценку ширины полосы принятого пилот-сигнала. Как пример, кадр может иметь длительность 20 мсек в системе с частотой следования кодовых элементов 1,2288 Мэлементов/с. Таким образом содержатся в любом одном кадре 24,576 кодовых элементов.
Фиг.5 представляет функциональную схему варианта осуществления настройки фильтра пилот-сигнала. Принимаемый пилот-сигнал и сопровождающий его шум поступают на устройство 510 оценки полосы. Устройство 510 оценки полосы определяет ширину полосы принимаемого пилот-сигнала. На выходе устройства 510 оценки ширины полосы может быть единичный сигнал или множество сигналов. Выход устройства 510 оценки ширины полосы связан с фильтром 520 ИИПС, называемым также устройством оценки величины сигнала. Фильтр ИИПС или устройство оценки величины может определять ИИПС множество сигналов на выходе устройства 510 оценки ширины полосы или может определять мощность сигнала или величину амплитуды сигналов. Выход фильтра ИИПС 520 соединяется с пороговым устройством 530, называемым также компаратором сигналов. Пороговое устройство 530 или компаратор сигналов определяет величину, по меньшей мере, одной функции G(f) и сравнивает эту величину с предопределенным пороговым значением. На основе результатов этого сравнения осуществляется настройка полосы фильтра пилот-сигнала. Если фильтр пилот-сигнала выполнен как цифровой фильтр, то для изменения коэффициентов фильтра можно использовать значения соответствующих функций G(f). Выходной сигнал порогового устройства 530 может представлять текущие коэффициенты фильтра, величину, которая может отображаться на коэффициенты фильтра, напряжение, ток или некоторый другой сигнал, который может быть использован для настройки полосы фильтра пилот-сигнала.
Фиг.6А представляет функциональную схему одного варианта реализации устройства 510 оценки ширины полосы. На Фиг.6А это устройство 510 включает в себя множество фильтров от H1 610 до HN 640. Частотные характеристики фильтров могут быть существенно не перекрывающимися, как показано на Фиг.2, или могут перекрываться, как показано на Фиг.3.
Фиг.6В представляет функциональную схему альтернативного варианта воплощения устройства 510 оценки ширины полосы. На Фиг.6В устройство 510 оценки ширины полосы содержит коррелятор 650, такой как описано со ссылкой на Фиг.4. Коррелятор 650 может, например, содержать процессор 652 и память 654 для получения корреляторов накопления и сохранения.
Вышеприведенные варианты воплощения описаны в связи с оценкой частотной полосы принимаемого пилот-сигнала и изменением ширины полосы фильтра пилот-сигнала, частично основанной на этой оценке. Однако существенно, что раскрытые способы и варианты воплощения могут использоваться для оценки ширины полосы принятого сигнала в различных каналах связи и соответствующая ширина полосы фильтра может изменяться для улучшения рабочих характеристик канала связи.
В то время как вышеприведенное подробное описание демонстрирует, описывает и указывает новые признаки изобретения в применении к различным вариантам воплощения, следует иметь в виду, что специалисты в данной области могут допускать различные пропуски, подмены или изменения в форме и деталях приведенного устройства или процесса без отклонения от сущности изобретения. Объем изобретения определяется прилагаемой формулой изобретения, а не вышеприведенным описанием. Все замены, допустимые с точки зрения эквивалентности формулы изобретения, входят в объем пунктов формулы изобретения.
Для специалистов в данной области очевидно, что информация и сигналы могут быть представлены путем использования множества различных технологий и методов. Например, такие понятия, как данные, инструкции, команды, информация, сигналы, двоичные коды (биты), символы и кодовые элементы, которые могут упоминаться в тексте вышеприведенного описания, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любой их комбинацией.
Для специалистов должно быть очевидно, что различные иллюстративные логические блоки, модули, цепи и этапы алгоритмов, описанные в связи с раскрытыми выше вариантами воплощения, могут быть реализованы как электронное оборудование, компьютерное программное обеспечение или комбинации обоих этих средств. Для того чтобы ясно проиллюстрировать такую взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, модули, цепи и этапы описаны выше, в основном, в терминах их функциональности. Реализуется ли эта функциональность посредством аппаратных средств или программного обеспечения, зависит от конкретного приложения и ограничений проектирования, налагаемых на систему в целом. Квалифицированные специалисты могут реализовать описанные функциональные средства различными путями для каждого конкретного приложения, но эти решения конкретной реализации не должны рассматриваться как отступление от объема данного изобретения.
Различные иллюстративные логические блоки, модули и цепи, описанные в связи с вариантами воплощения, раскрытыми выше, могут быть выполнены или осуществлены с помощью универсального процессора, цифрового процессора сигналов (DSP) или специализированных интегральных схем (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретных вентилей или транзисторных логических схем, отдельных компонент аппаратного обеспечения или посредством любой комбинации указанных средств, предназначенной для осуществления вышеописанных функций. Универсальным процессором может быть микропроцессор, но как альтернатива процессором может быть любой процессор, контроллер, микроконтроллер или конечный автомат. Процессор может быть также выполнен как комбинация вычислительных устройств, например как комбинация DSP и микропроцессора, множества различных микропроцессоров, одного или более микропроцессоров в соединении с базовым DSP или любая другая такая конфигурация.
Этапы метода или алгоритма, описанные в связи с раскрытыми вариантами воплощения, могут быть выполнены непосредственно аппаратными средствами в виде модуля программного обеспечения, выполняемого процессором, или посредством их комбинации. Модуль программного обеспечения может находиться в оперативном запоминающем устройстве (RAM), во флэш-памяти, в постоянном запоминающем устройстве (ROM), стираемой программируемой постоянной памяти (EPROM), электронно-перепрограммируемой постоянной памяти (EEPROM), регистрах, на жестком диске, съемном диске, ПЗУ на компакт-дисках (CD-ROM) или в любой другой известной форме запоминающей среды. Типичная запоминающая среда (носитель данных) связана с процессором, который может считывать информацию с этой запоминающей среды или записывать информацию на нее. В альтернативном варианте запоминающая среда может быть составной частью процессора. Процессор и запоминающая среда могут находиться в специализированной интегральной схеме. Специализированная интегральная схема может располагаться в мобильной станции, базовой станции или в контроллере базовой станции. Альтернативно процессор и запоминающая среда могут размещаться как отдельные компоненты.
Вышеприведенное описание раскрытых вариантов воплощения дано для того, чтобы любой специалист в данной области техники мог реализовать или использовать данное изобретение. Различные модификации этих вариантов воплощения должны быть очевидны для специалистов в данной области и к другим таким вариантам воплощения могут применяться определенные здесь общие принципы без отступления от сущности или объема данного изобретения. Таким образом не предполагается ограничивать данное изобретение представленными здесь вариантами воплощения. Напротив, данное изобретение имеет самый широкий объем в соответствии с принципами и новыми признаками, раскрытыми выше.



Заявлены способ и устройство для динамической настройки параметров фильтра пилот-сигнала. Технический результат - улучшение селекции пилот-сигналов в присутствии шума. Для этого входной сигнал, содержащий пилот-сигнал, подвергается фильтрации с использованием неидентичных фильтров и величины отфильтрованных сигналов сравниваются для оценки ширины полосы пилот-сигнала. Также может оцениваться шум, содержащийся во входном сигнале, предпочтительно в той части входного сигнала, которая, как ожидается, не содержит пилот-сигнала. На основе сравнения величин отфильтрованных сигналов, шумовой вклад в которые может быть скомпенсирован, изменяют параметры фильтра, применяемого для фильтрации входного сигнала с целью выделения пилот-сигнала. Эти параметры могут изменять ширину полосы фильтра пилот-сигнала. 8 н. и 19 з.п. ф-лы, 7 ил.
осуществляют фильтрацию принимаемого пилот-сигнала по множеству различных частот для формирования соответствующего множества различных отфильтрованных сигналов;
оценивают величину, по меньшей мере, двух отфильтрованных сигналов;
сравнивают величины, по меньшей мере, некоторых из, по меньшей мере, двух отфильтрованных сигналов для оценки ширины полосы принимаемого пилот-сигнала и
динамически изменяют ширину полосы фильтра пилот-сигнала в зависимости от сравнения величин, при этом если сравнение величин указывает на более высокую ширину полосы пилот-сигнала, то ширину полосы фильтра пилот-сигнала увеличивают, а если сравнение величин указывает на более узкую ширину полосы пилот-сигнала, то ширину полосы пилот-сигнала сужают.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля многоканальной радиолинии | 1991 |
|
SU1781832A1 |
| Приемник однополосных компандированных сигналов | 1989 |
|
SU1753600A1 |
| Динамический фильтр | 1983 |
|
SU1146795A1 |
| Устройство для крепления подкрановых балок к колоннам | 1980 |
|
SU901239A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

