Изобретение относится к транспортным устройствам и может быть применено в шагающей инвалидной коляске.
Известно шагающее устройство, содержащее корпус, двигатель, приводы и связанные с ним опоры (Авторское свидетельство СССР №275838, кл. BG5G 25/00, 1970 г.).
Известно шагающее устройство с шестью опорами, каждый привод которого выполнен в виде планетарной передачи, содержащей водило, связанное с двигателем, неподвижное центральное колесо с внутренними зубьями и зацепляющийся с ним сателлит, диаметр делительной окружности которого вдвое меньше диаметра неподвижного центрального колеса. Причем каждая опора выполнена в виде последовательно сочлененных посредством шарниров и узлов фиксации рычагов. Кроме того, устройство снабжено подвижной в окружном направлении крышкой, с диаметральным пазом и связанным с сателлитом, соосно установленным ему, колесом, тягами, связывающими рычаги опор с колесом, и кронштейном, взаимодействующим с колесом, пазом крышки и одним из рычагов опоры. Связь сателлита с колесом выполнена в виде шлицевого соединения, а узлы фиксации - в виде храповых механизмов, соединенных с тягой (Алиев А.С. и др. Шагающее устройство. Авторское свидетельство СССР №892057, м. кл3 F16H 27/00, 1978 г.).
Недостатком прототипа является сложность конструкции и отсутствие узла управления.
Технической задачей данного изобретения является упрощение конструкции, создание рулевого узла и снижение себестоимости.
Данная техническая задача решается путем создания новой конструкции шагающей инвалидной коляски (ШИК), которая содержит платформу, двигатель, приводы и связанные с ними опоры, а также блок управления изменением направления движения шагающей инвалидной коляски и кинематически связанные рулевой узел изменения направления движения опор и шесть периферийных гидротелескопических опор, взаимодействующие с соответствующими узлами преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор. Каждый узел изменения направления движения гидротелескопических опор содержит периферийную звезду, неподвижно связанную с установочной платформой, на которой установлен с возможностью свободного поворота узел преобразования вращательного движение в возвратно-поступательное движение гидротелескопрческих опор.
Узел преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор содержит кинематически связанные с валом двигателя первую и второю обгонные муфты, на ступицах которых неподвижно установлена сегментная шестерня. На обоймах указанных муфт неподвижно установлены первая и вторая шестерни с прямыми зубьями, взаимодействующие параллельно друг другу с диаметрально противоположных сторон шестерен. Причем зубья в сегментной шестерне занимают менее половины делительной окружности, которые взаимодействуют с зубчатыми рейками по очереди. При этом первая и вторая обгонные муфты установлены так, что при движении зубчатой рейки в одном направлении в сцепление входит первая обгонная муфта, а при его обратном движении - вторая.
Гидроцилиндры опор кинематически связаны с узлами изменения направления движения гидротелескопических опор и преобразования вращательного движения в поступательное движение гидротелескопических опор, которые взаимодействуют с рулевым узлом изменения направления движения.
Блок управления изменением направления движения ШИК содержит шесть последовательно переключающихся самоблокирующихся реле, срабатывающих от концевых включателей, обеспечивающих строгую последовательность шести циклов включение двигателя, четных и нечетных гидроцилиндров в режиме опускания и подъема выдвижных гидротелескопических опор, которые могут быть прерваны после третьего и шестого циклов с помощью первого и второго переключателей, для обеспечения поворота четных и нечетных опор на необходимый угол в пределах от 0 до ±180°.
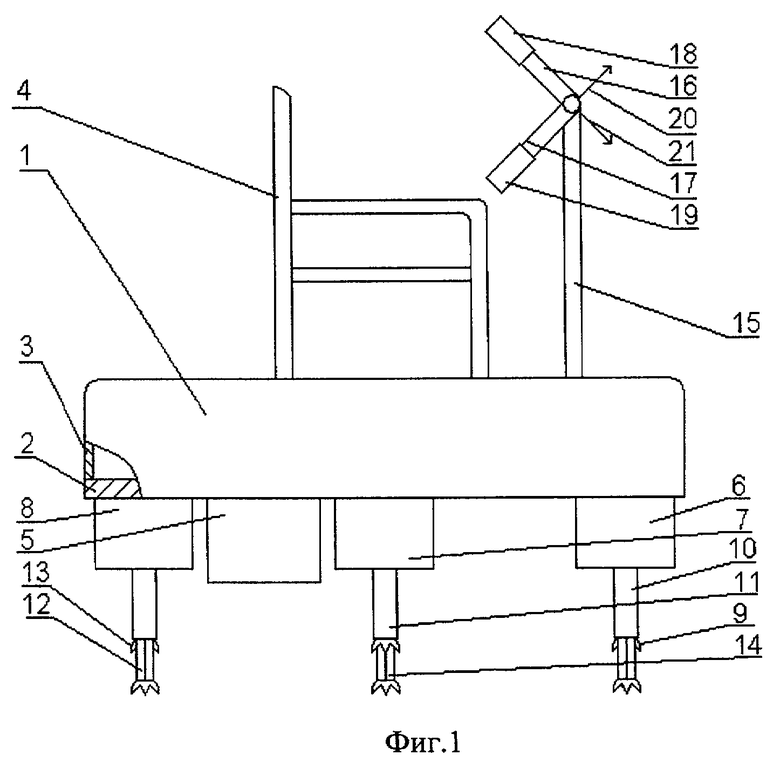
На фиг.1 представлен вид сбоку на шагающую инвалидную коляску, где:
1 - корпус;
2 - платформа;
3 - крышка;
4 - кресло;
5 - двигатель;
6, 7, 8 - второй, третий, четвертый преобразователи движения;
9, 10, 11, 12, 13, 14 - первый - шестой гидротелескопические опоры;
15 - рулевой узел;
16, 17 - первый и второй рычаги управления;
18, 19 - первая и вторая рукоятки фиксаторов поворота опор;
20, 21 - первый и второй указатели направления движения опор.
На фиг.2 представлен вид сверху на платформу 2 без крышки 3, где приведены три контура цепной связи между звездами ориентации и поступательного движения коляски:
22 - первая цепь;
23, 24, 25, 26, 27, 28 - первая - шестая звезды ориентации опор;
29, 30 - первая и вторая центральные звезды ориентации;
31, 32 - вторая и третья цепи;
33, 34, 35, 36, 37, 38 - первая - шестая звезды поступательного движения коляски;
39 - центральная звезда поступательного движения коляски;
40 - вал двигателя.
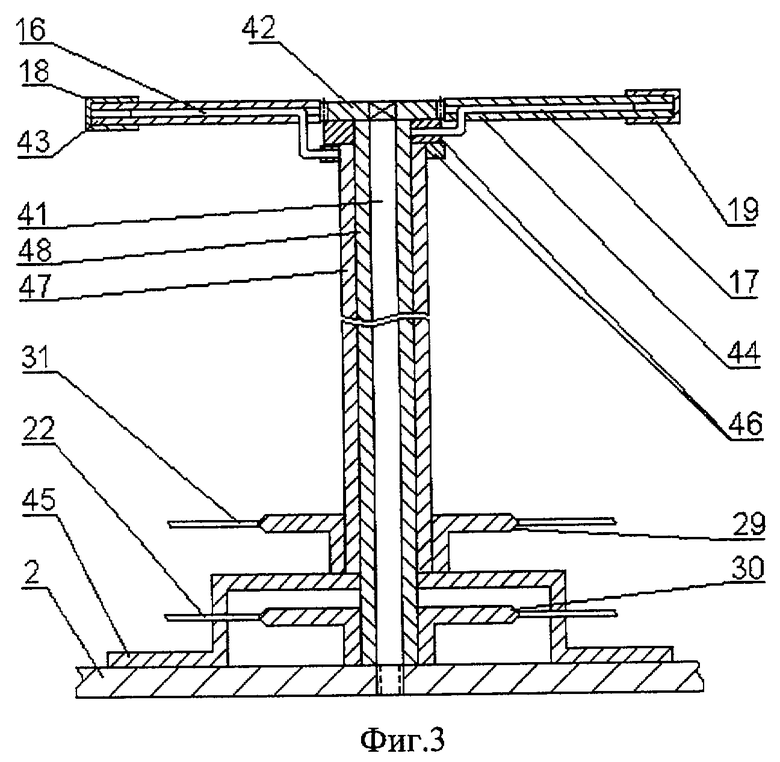
На фиг.3 представлена конструкция первого варианта рулевого узла, где позиции 2-31 те же, что на фиг.1 и фиг.2:
41 - стойка руля;
42 - шлицевой диск;
43, 44 - первая и вторая втулки фиксации ориентации опор;
45 - кронштейн первый;
46 - втулки установочные;
47, 48 - первый и второй трубчатые валы.
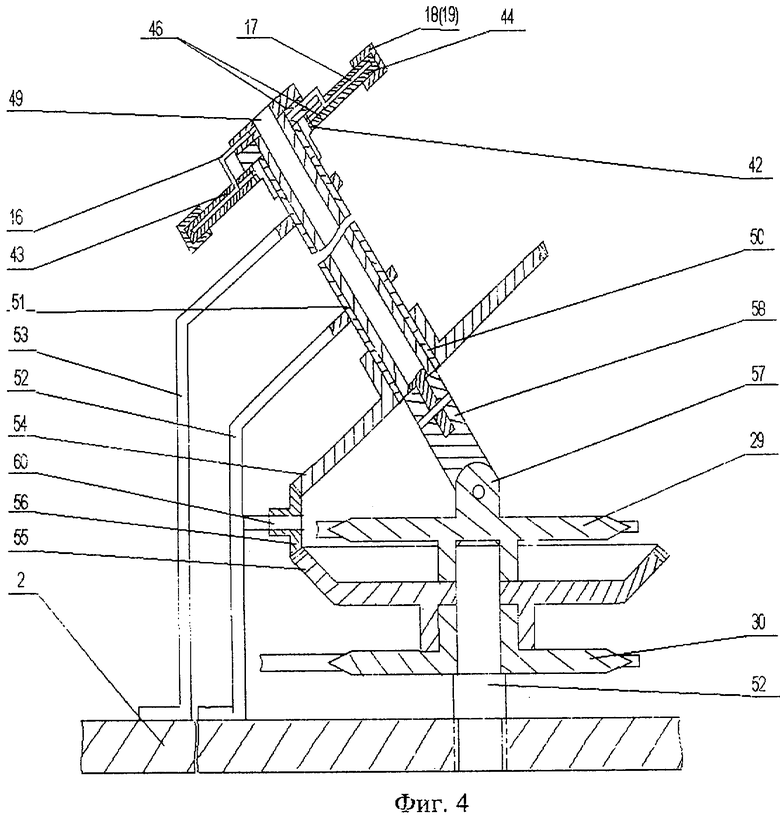
На фиг.4 представлена конструкция второго варианта рулевого узла, где позиции 2-46 те же, что на фиг.3:
49 - центральный вал;
50 - третий трубчатый вал;
51 - кожух руля;
52, 53 - второй и третий кронштейны;
54, 55 - ведущая и ведомая конические шестерни;
56 - промежуточная коническая шестерня;
57 - шарнирное соединение;
58 - карданный вал;
59 - ось поворота звезд;
60 - ось вращения промежуточной шестерни.
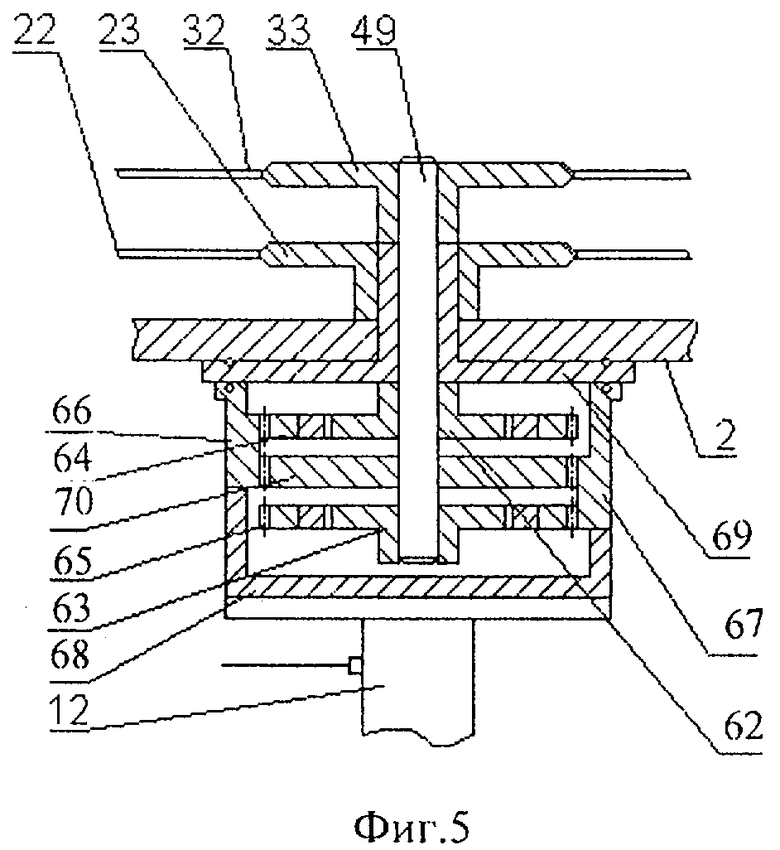
На фиг.5 представлена конструкция преобразователя вращательного движения звезд 33-38 в поступательное движение опор, где позиции 2-33 те же, что и на фиг.1 и фиг.2:
61 - вал преобразователя движения;
62, 63 - первая и вторая обгонные муфты;
64, 65 - первая и вторая шестерни;
66, 67 - первая и вторая зубчатые рейки;
68 - перемычка;
69 - платформа установочная;
70 - сегментная шестерня.
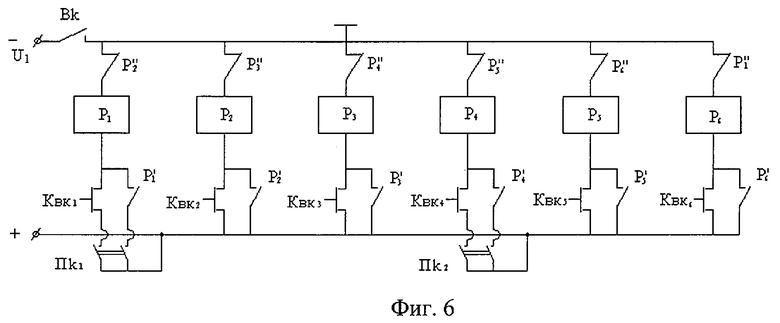
На фиг.6 представлена электрическая схема блока управления, где:
Р1-Р6 - первое - шестое реле;
Квк1-Квк6 - первый - шестой концевые включатели;
Пк1-Пк2 - первый и второй переключатель;
Вк - включатель питания электрической схемы.
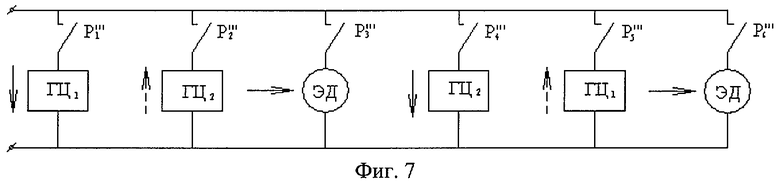
На фиг.7 представлена последовательность включения нечетных и четных гидроцилиндров (ГЦ1, ГЦ2) в режиме опускания и подъема опор и электродвигателя для продольного перемещения опор.
На фиг.8 представлена последовательность чередования циклов, которая задается блоком управления (фиг.6).
Принцип работы шагающей инвалидной коляски (ШИК), конструкция которого представлена на фиг.1 - фиг.5, заключается в следующем.
Работа ШИК основана на применении конструкции прототипа - шагающего вездехода. Конструкция вездехода дополнена рулевым механизмом и креслом, установленным над корпусом ШИК. Существенные изменения внесены в конструкции приводов гидротелескопических опор. ШИК состоит из корпуса 1, содержащего платформу прямоугольной формы, закрытую крышкой 3, и шести выдвигающихся гидротелескопических опор. Опоры установлены под платформой с возможностью изменения их направления движения. Нечетные и четные опоры ШИК выдвигаются по очереди. Опираясь попеременно на три четные или нечетные опоры, расположенные по вершинам треугольника, платформа ШИК сохраняет при движении свое горизонтальное положение.
Узел рулевого управления обеспечивает мгновенное изменение направления движения ШИК в пределах от 0 до ±180°.
В центре платформы установлены кресло 4 и рулевой узел 15 изменения направления движения опор, кинематически связаны с шестью периферийными узлами преобразователя движения, обеспечивающих поступательное движение опор.
Платформе 2 первоначально передается горизонтальное положение и она держится на трех выдвижных телескопических (например, на четных) опорах ГТО2. Три другие - нечетные опоры ГТО1 должны находиться в поднятом положении. После одного цикла перемещения вперед нечетные опоры опускаются вниз до соприкосновения с земной поверхностью, пока не сработают все три концевые включатели опор. После этого четные опоры ГТО2 поднимаются вверх до упора. При этом срабатывают все три верхние концевые включатели. После этого начинается следующий цикл перемещения платформы вперед. Последовательность смены циклов обеспечивается с помощью электрической схемы блока управления изменением направления движения ШИК, приведенной на фиг.6.
Для изменения направления движения ШИК достаточно повернуть с помощью рукоятки 18 (19) втулку фиксации ориентации опор 43 (44) и повернуть рычаги 16 (17) на нужный угол. В соответствии с кинематической схемой цепной связи между центральной звездой 29 (30) и периферийными звездами 23-27, приведенной на фиг.2, при повороте центральной звезды на угол φ по часовой стрелке периферийная звезда поворачивается на такой же угол φ также по часовой стрелке. В этом же направлении будет шагать ШИК в следующий цикл продольного движения. При выключенном переключателе Пк1 (Пк2) ШИК остановится и будет ждать изменения направления движения оставшихся трех выдвижных ГТО. При подъеме или опускании по лестнице, а также при посадке в транспортное средство необходимо поднять или опускать платформу на фиксированную высоту. Для этого вводятся дополнительно 4 и 9 циклы.
После установки обеих указателей направления движения 20, 21 в одинаковое угловое положение ШИК будет шагать вдоль установленного направления. Когда указатели направлены в разные стороны ШИК будет двигаться по зигзагу.
Подъем и опускание платформы в 4 и 9 циклах, как и поворот в том или другом направлениях, в 5 и 10 циклах осуществляется только при необходимости с участием самого инвалида. Для этой цели в электрическую схему на фиг.6 введены первый Пк1 и второй Пк2 переключатели. При выключенных переключателях после 3 и 8 циклов ШИК останавливается и ждет дальнейших действий инвалида. Он поднимает или опускает платформу на высоту одной ступени лестницы или на высоту ступени транспортного средства. Для этого он включает гидроцилиндры трех выдвижных телескопических четных (или нечетных) опор на подъем или опускание платформы. Включаются те три опоры, на которые ШИК опирается в данный момент времени. После этого осуществляется при необходимости поворот трех других опор, находящихся в поднятом состоянии в ту или другую стороны. Затем включается соответствующий переключатель и ШИК продолжает свое движение в заданном направлении.
Для изменения направления движения ШИК необходимо выключить переключатель Пк2 с помощью отжимного фиксатора. Если ШИК предназначен только для продвижения инвалида по рельефной поверхности земли, он может быть выполнен в форме четырехгранника. В центре платформы установлены кресло и рулевые узлы для изменения направления движения опор, кинематически связанный с шестью периферийными узлами гидротелескопических опор (ГТО1 и ГТО2).
Платформе 2 первоначально передается горизонтальное положение и она держится на трех выдвижных телескопических (например, на четных) опорах ГТО2. Три другие - нечетные опоры ГТО1 должны находиться в поднятом положении. После одного цикла перемещения вперед нечетные опоры опускаются вниз до соприкосновения с земной поверхностью и пока не сработают все три концевые включатели опор. После этого четные опоры ГТО2 поднимаются вверх до упора. При этом срабатывает все три верхние концевые включатели. После этого начинается следующий цикл перемещения платформы вперед. Последовательность смены циклов обеспечивается с помощью электрической схемы блока управления изменением направления движения ШИК, приведенной на фиг.6.
Центральный узел поступательнорго движения опор содержит электродвигатель 5, на валу 40 которого установлена центральная звезда 39, которая приводит во вращение шесть ведомых звезд 33-37. Вращение от ведомой заезды с помощью третьей цепи 32 передается на ведомые периферийные звезды. Вращение ведомых периферийных звезд 33-38 передается на узлы преобразования вращательного движения в возвратно-поступательное движение опор. После начала обратного хода зубчатой рейки сегментная шестерня 70 входит в сцепление со второй зубчатой рейкой 67 (см. фиг.4) и создает положительный момент вращения на валу 61.
Таким образом поочередное сцепление сегментной шестерни с соответствующими двумя зубчатыми рейками (см. фиг.4) обеспечивает возвратно-поступательное движение опор.
Таким образом в случае применения двух параллельных реек 66, 67 одна сегментная шестерня 70 входит в сцепление по очереди с указанными зубчатыми рейками и обеспечивает их перемещение в прямом и обратном направлениях.
Сегментная шестерня 70 установлена на валу 61 неподвижно. Спицы обгонных муфт входят в сцепление по очереди при движении реек в двух противоположных направлениях. Сегментная шестерня входит в сцепление с зубчатыми рейками 66, 67 также по очереди. Для этой цели зубчатые рейки сдвинуты относительно друг друга в поперечном направлении и взаимодействуют с сегментной шестерней с диаметрально противоположных сторон.
В шагающем вездеходе полный период движения складывается из следующих девяти циклов, повторяющихся строго в заданной последовательности.
Начало и конец циклов 1-3, 6-8 можно тактировать с помощью трех последовательно соединенных микропереключателей, которые переключают самоблокирующие реле (элемент и).
Контакты реле включают в заданной последовательности цепи питания электродвигателей, выполняющих определенные операции.
Процесс перемещения шагающей инвалидной коляски (ШИК) состоит из десяти циклов, строго следующих один за другим. Этот процесс можно запрограммировать с помощью электрической схемы, приведенной на фиг.6. Электрическая схема состоит из шести самоблокирующихся электрических реле, которые последовательно включаются при замыкании концевых включателей (Квк1-Квк6). Последовательное переключение обеспечивается путем размыкания нормально замкнутых контактов, через которые замыкается цепь питания реле предыдущего цикла.
Последовательность цикла следующая:
1. Опускание нечетных опор до замыкания трех концевых включателей. Эта операция осуществляется при нажатии концевого включателя Квк1 с помощью реле Р1, замыкающего цепь питания первых гидротелескопических опоров (ГТО). После того, как сработают все три концевых переключателя, соединенных друг с другом последовательно (операция «И»); на схеме 8, заменено одним включателем Квк2, срабатывает реле Р2. Аналогичным образом роль Квк1 играет три последовательно включенных концевых включателей, которые срабатываются после седьмого цикла и при полном опускании четных ГТО2.
2. Контактами Р2 происходит самоблокировка Р2'. Реле Р2 своими контактами включает цепи питания трех четных гидротелескопических опор (ГТО2). Четные опоры опускаются до тех пор, пока не сработают все три последовательно соединенные концевые включатели (заманены одним включателем Квк3).
3. При включении Квк1 срабатывает реле Р3, которое самоблокируется контактами Р3' и размыкает контактами Р3'' цепь питания Р2.
Реле Р3 включает электродвигатель ЭД1, который вращает через коническую пару шестерен радиальные валы, которые через вторые конические пары шестерен приводят во вращение шестерен узлов преобразования вращательного движения во возвратно-поступательное (см. фиг.4).
В результате платформа перемешается вперед относительно неподвижных четных ГТО1. В то же самое время поднятые четные ГТО2 в холостую перемещаются обратно до опора, пока не сработают все три концевые включатели. Перемещение платформы вперед также приводит к срабатыванию трех концевых включателей. Все шесть концевые включатели включены последовательно (образуют элемент «И») и заменены одним включателем Квк4.
4. Включение включателя Квк4 приводит к срабатыванию реле Р4, который самоблокируется и разрывает цепь питания реле Р3. Реле Р4 включает цепи питания трех ГТО2.
При этом четные гидротелескопические опоры опускаются до соприкосновения с земной поверхностью и не сработают концевые включатели. Концевой включатель должен сработать после обеспечения надежного контакта подпятника с земной поверхностью. Для этой цели может быть использована пружина, которая должна сжиматься до определенного давления, прежде чем замкнутся контакты включателя. Подбирая жесткость пружины, возможно обеспечить необходимое усилие на каждом из трех опор.
После включения всех трех последовательно включенных концевых включателей (заменен элементом «И» - Квк5) срабатывает реле Р5.
5. Реле Р5 самоблокируется и размыкает цепь питания Р4. Контактами Р5''' замыкается цепь питания трех нечетных ГТО1. После чего опускаются все три нечетные гидротелескопические упоры до земной поверхности. После обеспечения надежного контакта с землей срабатывают все три концевые выключатели, которые заменены одним выключателем Р6.
6. Реле Р6 самоблокируется и включает своими контактами Р6 цепь питания электродвигателя ЭД.
При этом платформа передвигается вперед на трех нечетных опорах. Одновременно поднятые четные опоры возвращаются обратно в исходное положение.
Процесс перемещения прекращается после того, как сработают все шесть концевых выключателей, которое заменены включателем Квк1.
При включенном переключателе Пк2 срабатывает реле Р1 и происходит полное повторение всех шести циклов. Это приводит к поступательному прямолинейному перемещению шагающего вездехода, переступая препятствия на своем ходу.
Изменение направления движения ШИК может быть осуществлено после третьего или седьмого циклов. Для этой цели на фиг.6 используется переключатель Пк1 и Пк2, которые прерывают движение после третьего и седьмого циклов. При необходимости после третьего и седьмого циклов инвалид производит подъем или опускание платформы, а затем поворот опор в ту или другую стороны. Для изменения направления движения ШИК используются рулевые узлы изменения направления движения, представленные на фиг.4 и фиг.5.
Рулевой узел 15, конструкция которого представлена на фиг.3, состоит из вертикальной стойки руля 41, неподвижно закрепленной на платформе 2. На стойке руля соостно установлены первый 47 и второй 48 трубчатые валы с возможностью свободного поворота. В корневой (нижней) части первого и второго трубчатых валов неподвижно установлены первая 29 и вторая 30 центральные звезды ориентации соответственно. Верхние наконечники указанных валов с помощью установочных втулок 46 неподвижно соединены с первым 16 и вторым 17 рычагами управления соответственно.
На верхнем наконечнике стойки руля 41 неподвижно закреплен шлицевой диск 42, по окружности шлицевого диска нарезаны эквидистантно шлицы прямоугольного профиля, которые входят в сцепление с торцевыми наконечниками первой 43 и второй 44 фиксации ориентации опор. Данные втулки установлены на соответствующих рычагах управления 16 и 17 с возможностью поступательного перемещения. Это обеспечивается с помощью спирального паза в корневой части втулок фиксации ориентации 43 и 44. Через спиральные пазы втулок ориентации проходят согнутые под прямым углом корневые наконечники соответствующих рычагов управления 16 и 17, на периферийных наконечниках втулок фиксации ориентации опор 43 и 44 неподвижно установлены соответствующие рукоятки фиксатора поворота опор 18 и 19. При повороте левой рукоятки 18 по часовой стрелке, правой 19 - против наконечники втулок фиксации ориентации опор 43 или 44 выходят из сцепления со шлицами диска 42. Для этого спиральный паз первой втулки 43 должен иметь левый наклон, а второй втулки 44 - правый наклон.
После вывода одной из втулок из фиксированного положения путем поворота соответствующего рычага 16 (или 17) и связанного с ним первого 47 (или второго 17) трубчатого вала поворачивается первая 29 (или вторая 30) звезда в ту или другую стороны. Центральная первая звезда ориентации 29 с помощью второй цепи 31 связаны и взаимодействуют с нечетными периферийными звездами ориентации 23, 25, 27. Вторая центральная звезда с помощью третьей цепи 32 кинематически связана и взаимодействует с четными периферийными звездами ориентации 24, 26, 28.
Кронштейн 45 имеет П-образный профиль и шарнирно установлен на стойке руля 41. Кронштейн обеспечивает необходимую высоту установки первого трубчатого вала 47 и первой центральной звезды ориентации нечетных опор 29.
Первый 20 и второй 21 указатели направления движения опор неподвижно связаны с нижним и верхним установочными втулками 446 соответственно. Указатели имеют вид стрелки и связаны со втулками в радиальном направлении. При закрытой крышке 3 указатели 20 и 21 показывают направление движения четных и нечетных гидротелескопических опор. Когда указатели совпадают по направлению, ШИК двигается поступательно в указанном направлении. Когда указатели направлены в разные стороны, ШИК двигается по зигзагу. Необходимость в движении по зигзагу возникает, в частности, когда ширина ступеней лестницы меньше, чем длина поступательного движения гидротелескопических опор. 6
Длина поступательного движения опор L≤πR, где: R - радиус делительной окружности сегментной первой 52 и второй 53 шестерен.
Принцип действия второго варианта рулевого узла (см. фиг.4) заключается в следующем.
Второй вариант рулевого узла позволяет установить центральные звезды ориентации 29 и 30 на любом расстоянии от кресла и приблизить рычаги управления 16, 17 включателей и переключателей электрических цепей к человеку на удобное для него расстояние и углом поворота рычагов. Поворот и фиксация ориентации направления движения опор во втором варианте рулевого узла осуществляется с помощью рычагов управления 16, 17 и втулок фиксации ориентации опор 43 и 44, так же как и в первом варианте рулевого узла на фиг.3.
Различие заключается в том, что шлицевой диск 42 неподвижно связан с кожухом руля 51, кожух руля кренится с помощью второго 52 и третьего 53 кронштейнов к платформе 2 вдоль оси симметрии коляски. Угол наклона руля задается из удобства управления и других конструктивных соображений. Внутри кожуха соостно установлены центральный вал 49 и третий трубчатый вал 50 с возможностью свободного относительного поворота.
Верхний конец центрального вала 49 с помощью установленной втулки 46 неподвижно связан с корневым наконечником первого рычага управления 16. При этом верхний конец третьего трубчатого вала также с помощью второй установленной втулки 46 неподвижно связан со вторым рычагом управления 17. На фиг.4 рычаги 16 и 17 разведены на 90° против часовой стрелки относительно их нейтрального положения. Указатели направления 20 и 21 как в первом варианте рулевого узла неподвижно связаны с соответствующими установленными втулками и направлены от наблюдателя (на фиг.4 не видны). Нижний конец центрального вала 49 шарнирно связан с карданным валом 58. Нижний конец корданного вала через шарнирное соединение 57 связан и взаимодействует с первой (верхней) центральной звездой ориентации 29. Второй рычаг управления 17 через третий трубчатый вал 50 конические шестерни 54, 55 и 56 взаимодействует со второй (нижней) центральной звездой ориентации 30.
Ведущая коническая шестерня 54 неподвижно установлена на нижнем наконечнике третьего трубчатого вала 50. Ведомая коническая шестерня 55 неподвижно связана со второй центральной звездой ориентации 30. Промежуточная шестерня 56, шарнирно установленная на оси вращения 60, входит в сцепление с ведущей и ведомой шестернями. При вращении ведущей шестерни по часовой стрелке ведомая шестерня также вращается в том же направлении. При одинаковых размерах и числе зубцов шестерен 54 и 55 ориентация опор меняется на такой же угол, на какой будет повернут соответствующий рычаг управления 17. Центральные звезды ориентации 29 и 30 установлены на оси 59 с возможностью свободного поворота на угол ±180°. Центральные звезды ориентации 29 и 30 с помощью цепей 31 и 22 взаимодействуют с нечетными и четными периферийными звездами ориентации соответственно. В остальном принцип работы первого и второго вариантов конструкции рулевых узлов полностью совпадают.
Узел преобразования вращательного движения в возвратно-поступательные движения опор, конструкция которого представлена на фиг.5, функционирует следующим образом.
Узлы преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор 9-14 размещаются на платформе 2 в шести точках согласно кинематической схеме на фиг.2.
Установочная платформа 69 установлена на платформе 2 с возможностью свободного поворота. По оси установочной платформы шарнирно установлен вал 61. На верхнем конце указанного вала неподвижно периферийная звезда поступательного движения 33(34-38). На нижнем конце данного вала также неподвижно установлены ступицы первой 62 и второй 63 обгонных муфт, а также сегментная шестерня 70. На обоймах первой и второй обгонных муфт неподвижно установлены первая 64 и вторая 65 шестерни соответственно. При этом зубцы первой шестерни 64 постоянно находятся в сцеплении с зубцами первой зубчатой рейки 66, а зубцы второй шестерни 65 - с зубцами второй зубчатой рейки 67.
Зубцы сегментной шестерни 70 занимают менее половины ее делительной окружности и входят в сцепление с зубцами первой и второй зубчатых реек по очереди. При этом зубчатые рейки 66 и 67 сдвинуты относительно друг друга в поперечном направлении и взаимодействуют с первой 64, второй 65 и сегментной 70 шестернями с диаметрально противоположных сторон. Первая и вторая сегментные шестерни могут быть заменены звездами. А первая и вторая зубчатые рейки также могут быть заменены на два параллельных участка цепи, установленные неподвижно на прямоугольных металлических пластинах. Сегментная звезда, как и сегментная шестерня, неподвижно устанавливается на валу и по очереди входит в сцепление с одной из двух параллельных цепей, заменяющих каждую зубчатую рейку. Зубцы сегментной звезды также занимают менее половины ее делительной окружности. В остальном принцип их работы совпадает с вышеизложенным.
Кроме того, обгонные муфты 62 и 63 установлены на валу 61 так, чтобы при вращении вала они входили в сцеплении по очереди. При взаимодействии сегментной входит первая обгонная муфта. При вращении сегментной шестерни по часовой стрелке это приводит к поступательному перемещению первой зубчатой рейки 66 вперед. Вторая зубчатая рейка 67, неподвижно связанная перемычкой 68 с первой, выводит через вторую шестерню 65, вторую обгонную муфту 63 из сцепления. При этом вторая шестерня 65 крутится в холостую против часовой стрелки. Через полпериода сегментная шестерня входит в сцепление с второй зубчатой рейкой 67. В сцепление входит вторая обгонная муфта 63. Ведущей становится вторая шестерня и вторая обгонная муфта. Взаимодействие их со второй зубчатой рейкой приводит к ее перемещению в обратном направлении. При этом первая обгонная муфта выходит из сцепления, а первая шестерня вращается в холостую против часовой стрелки.
Для изменения направления движения с прямого на обратное может быть использован реверсивный электродвигатель и переключатель полярности подаваемого напряжения на электродвигатель.
Для изменения направления движения гидротелескопических опор нет необходимости в повороте рычагов управления 16 и 17 в пределах угла 0 до ±180°. Достаточно повернуть рычаги управления в пределах угла от 0 до ±90° и менять направление выдвижения гидротелескопических опор на противоположное. При обратном ходе зубчатых реек соответствующие гидротелескопические опоры опущены и платформа с креслом перемещается назад. Электрический метод изменения направления движения упрощает конструкцию ШИК.
Шагающая инвалидная коляска перемещается по рельефной поверхности земли, переступая через препятствия, поднимается и спускается по лестнице, позволяет инвалиду самостоятельно сесть в общественный транспорт и сходить с него без посторонней помощи. При этом ШИК сохраняет горизонтальное положение своей платформы. Шагающая инвалидная коляска может быть использована для транспортировки информационных телевизионных систем, для ликвидации взрывчатых устройств в системе МЧС и т.д. Устройством легко можно управлять дистанционно с помощью радиотелемеханической системы.
Шагающий вездеход позволяет легко осуществить дистанционное управление его движением по поверхности планет, под водой в среде с повышенной радиацией и температурой, в бактериальной среде и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ ВЕЗДЕХОД | 2007 |
|
RU2356775C2 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2009 |
|
RU2386066C1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА (ВАРИАНТЫ) | 2009 |
|
RU2387434C1 |
| ВОЛНОВОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2373424C1 |
| ВОДНОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2361109C1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |
| КОЛЕБЛЮЩИЙСЯ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2008 |
|
RU2386855C1 |
| ВОДНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2008 |
|
RU2370661C1 |
| ВОЛНОВАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2008 |
|
RU2374484C1 |

Изобретение относится к транспортным устройствам и может быть применено в шагающей инвалидной коляске. Шагающая инвалидная коляска содержит платформу, двигатель, приводы и кинематически связанные с ними преобразователи движения и шесть гидротелескопических опор, а также блок управления изменением направления движения, кресло и рулевой узел. Приводы гидротелескопических опор выполнены в виде кинематически связанных цепью центральной звезды и шести периферийных звезд поступательного движения коляски, взаимодействующих с соответствующими узлами преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор. Блок управления изменением направления движения также выполнен в виде первой и второй центральных звезд ориентации, взаимодействующих с рулевым узлом. Первая центральная звезда ориентации с помощью третьей цепи кинематически связана и взаимодействует с нечетными периферийными звездами ориентации. Вторая центральная звезда ориентации с помощью второй цепи взаимодействует с четными периферийными звездами ориентации. Периферийные звезды ориентации взаимодействуют с соответствующими преобразователями вращательного движения в возвратно-поступательное движение гидротелескопических опор. Достигается упрощение конструкции шагающей инвалидной коляски. 2 з.п. ф-лы, 8 ил.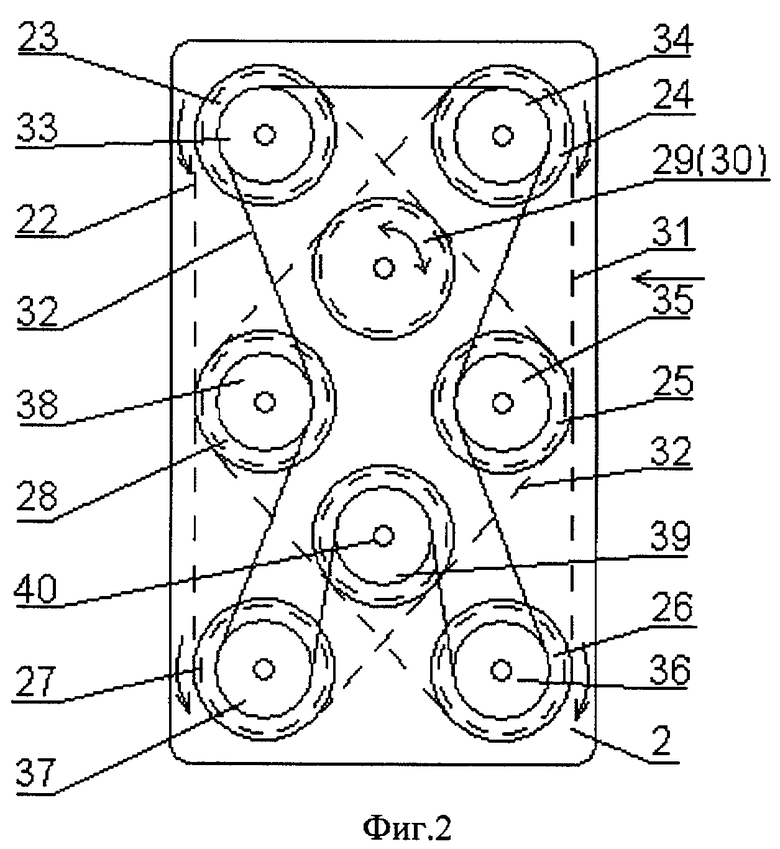
1. Шагающая инвалидная коляска, содержащая платформу, двигатель, приводы и кинематически связанные с ними преобразователи движения и шесть гидротелескопических опор, а также блок управления изменением направления движения, отличающаяся тем, что содержит дополнительно кресло и рулевой узел, а приводы гидротелескопических опор выполнены в виде кинематически связанных цепью центральной звезды и шести периферийных звезд поступательного движения коляски, взаимодействующих с соответствующими узлами преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор, кроме того, блок управления изменением направления движения также выполнен в виде первой и второй центральных звезд ориентации, взаимодействующих с рулевым узлом, при этом первая центральная звезда ориентации с помощью третьей цепи кинематически связана и взаимодействует с нечетными периферийными звездами ориентации, а вторая центральная звезда ориентации с помощью второй цепи взаимодействует с четными периферийными звездами ориентации, причем периферийные звезды ориентации взаимодействуют с соответствующими преобразователями вращательного движения в возвратно-поступательное движение гидротелескопических опор.
2. Шагающая инвалидная коляска по п.1, отличающаяся тем, что рулевой узел содержит стойку руля, шлицевой диск, первые и вторые рычаги управления, втулки фиксации ориентации опор, первые и вторые трубчатые валы и установочные втулки, при этом верхние наконечники первого и второго трубчатых валов через установочные втулки неподвижно связаны с соответствующими рычагами управления, на которых с возможностью поступательного движения установлены соответствующие втулки фиксации ориентации опор, взаимодействующие с шлицевым диском, неподвижно связанные с стойкой руля, кроме того, на нижних наконечниках первого и второго трубчатых валов неподвижно установлены соответствующие центральные звезды ориентации.
3. Шагающая инвалидная коляска по п.2, отличающаяся тем, что рулевой узел содержит установленные под углом к платформе соосно кожух руля, третий трубчатый и центральный валы, ведущая, промежуточная и ведомая конические шестерни и карданный вал, при этом кожух неподвижно связан с шлицевым диском, который взаимодействует с первым рычагом управления через третий трубчатый вал и конические шестерни со второй центральной звездой ориентации, а также со вторым рычагом управления через центральный и карданный валы с первой центральной звездой ориентации, при этом первая и вторая звезды ориентации шарнирно установлены на оси с возможностью свободного поворота.
| Шагающее устройство | 1978 |
|
SU892057A1 |
| ШАГАЮЩИЙ ВЕЗДЕХОД | 2007 |
|
RU2356775C2 |
| US 2002060267 A1, 23.05.2002 | |||
| Устройство для преобразования возвратно-поступательного движения в шаговое вращательное | 1985 |
|
SU1280250A1 |
| US 5005658 A, 09.04.1991. | |||

