Изобретение относится к транспортным устройствам и может быть применено в шагающем роботе.
Известно шагающее устройство, содержащее корпус, двигатель, приводы и связанные с ним опоры (авторское свидетельство СССР №275838, кл. B G5G 25/00, 1970 г.).
Недостатком этого устройства является сложность в управлении и отсутствие маневренности в движении. Это связано с тем, что для устранения горизонтальных качений во время его шагания по рельефной поверхности устройство снабжено следящим механизмом.
Наиболее близким по технической сущности и достигаемому результату к изобретению (прототипом) является шагающее устройство с шести опорами, каждый привод которого выполнен в виде планетарной передачи, содержащей водило, связанное с двигателем, неподвижное центральное колесо с внутренними зубьями и зацепляющийся с ним сателлит, диаметр делительной окружности которого вдвое меньше диаметра неподвижного центрального колеса. Причем каждая опора выполнена в виде последовательно сочлененных посредством шарниров и узлов фиксации рычагов. Кроме того, устройство снабжено подвижной в окружном направлении крышкой с диаметральным пазом и связанной с сателлитом, соосно установленным ему. Устройство снабжено также колесом, тягами, связывающими рычаги опор с колесом, и кронштейном, взаимодействующим с колесом, пазом крышки и одним из рычагов опоры. Связь сателлита с колесом выполнена в виде шлицевого соединения, а узлы фиксации - в виде храповых механизмов, соединенных с тягой (Алиев А.С. и др. Шагающее устройство. Авторское свидетельство СССР №892057, м.кл3 F16H 27/00, 1978 г., прототип).
Недостаток прототипа является сложность конструкции и ограниченность зоны проходимости, связанная с невозможностью преодоления водных преград.
Технической задачей данного изобретения является упрощение конструкции устройства и повышение его проходимости.
Данная техническая задача решается путем создания принципиально новой конструкции шагающего вездехода, который перемещается по суше, переступая через препятствия и плавает, когда встречает водные препятствия. При этом шагающий вездеход (ШВХ) сохраняет горизонтальное положение своей платформы. Такая особенность вездехода очень важна при транспортировке информационных телевизионных систем, особенно по поверхности планет. Целью предложенного технического решения является упрощение конструкции шагающего вездехода и расширение его функциональных возможностей, которое заключается в преодолении водных препятствий путем плавания и в мгновенном изменении направления движения при перемещении по суше и воде.
Шагающий вездеход содержит платформу, двигатель, приводы и связанные с ними опоры, а также блок управления изменением направления движения шагающего вездехода и кинематически связанные центральный узел изменения направления движения опор и шесть периферийных гидротелескопических опор, взаимодействующих с соответствующими узлами преобразования вращательного движения в возвратно-поступательное движение.
Центральный узел изменения направления движения гидротелескопических опор содержит первую и вторую звезды, установленные на неподвижной втулке с радиальными отверстиями с возможностью свободного вращения, угловое положение которых устанавливается подпружиненными отжимными фиксаторами. При этом первая звезда через первую цепь взаимодействует с периферийными звездами узлов изменения направления нечетных опор, а вторая звезда через вторую цепь - с периферийными звездами узлов изменения направления движения четных гидротелескопических опор.
Приводы периферийных гидротелескопических опор выполнены в виде радиальных шести валов, на концах которых неподвижно установлены конические шестерни, с помощью которых вращение центральной конической шестерни, установленной на валу двигателя, передается на соответствующие узлы преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор.
Каждый узел изменения направления движения гидротелескопических опор содержит периферийную звезду, неподвижно связанную с поворотной планкой, на которой установлен с возможностью свободного поворота узел преобразования вращательного движения в возвратно-поступательное движение опор.
Узел преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор содержит кинематически связанные с двигателем первую и вторую обгонные муфты, на ступицах которых неподвижно установлена сегментная шестерня. На обоймах указанных муфт неподвижно установлены первая и вторая шестерни с прямыми зубьями, взаимодействующие с соответствующими зубчатыми рейками, установленными параллельно друг другу с диаметрально противоположных сторон шестерен. Причем зубья в сегментной шестерне занимают менее половины делительной окружности и взаимодействуют с зубчатыми рейками по очереди. При этом первая и вторая обгонные муфты установлены так, что при движении зубчатой рейки в одном направлении в сцепление входит первая обгонная муфта, а при его обратном движении - вторая.
Гидроцилиндры гидротелескопических опор кинематически связаны с узлами изменения направления движения гидротелескопических опор и преобразования вращательного движения в поступательное движение гидротелескопических опор, взаимодействующих с центральным узлом изменения направления движения гидротелескопических опор.
Плавающий вариант шагающего вездехода содержит дополнительно верхние и нижние плоские плавники, установленные на гидротелескопических опорах с возможностью поворота на 90°. При этом нижние плавники установлены неподвижно на втулках с наклонными прорезами, взаимодействие которых с пальцами, неподвижно установленными на нижних наконечниках гидротелескопических опор, обеспечивают подъем и опускание нижних плавников, а также изменение ориентации нижних и верхних плавников на 90°.
Блок управления изменением направления движения шагающего вездехода содержит шесть последовательно переключающихся самоблокирующихся реле, срабатывающих от концевых включателей, обеспечивающих строгую последовательность шести циклов включения двигателя, четных и нечетных гидроцилиндров в режиме опускания и подъема выдвижных гидротелескопических опор, которые могут быть прерваны после третьего и шестого циклов с помощью первого и второго переключателей, для обеспечения поворота четных и нечетных опор на необходимый угол в пределах от 0 до ±180°.
На фиг.1 представлен вид сверху на шагающий вездеход, где
1 - передвижная платформа;
2 - блок управления изменением направления движения шагающего вездехода;
3, 5, 7 - нечетные узлы опор;
6, 8 - четные узлы опор;
9, 10 - звезды четных и нечетных опор;
11, 12 - первая и вторая цепи;
13 - ведущая центральная коническая шестерня;
14 - ведомые центральные конические шестерни;
15 - радиальные валы;
16 - ведущие периферийные конические шестерни;
17 - ведомые периферийные конические шестерни.
На фиг.2 представлена конструкция блока управления изменением направления движения шагающего вездехода, где
18 - платформа;
19 - двигатель с редуктором;
20 - фланец;
21 - вал ведущий;
22 - втулка установочная;
23, 24 - вторая и третья втулки со звездами;
25 - радиальные фиксирующие отверстия;
26, 27 - первый и второй отжимные фиксаторы, каждый который состоит из
28 - рукоятки с фиксирующим наконечником 29;
30 - стержни;
31 - гайки;
32 - колпаки;
33 - пружины.
На фиг.3 представлены конструкции узла изменения направления движения опор и преобразования вращательного движения в возвратно-поступательное движение, где
34 - гидроцилиндр;
35 - выдвижная гидротелескопическая опора (поршень со штоком);
36 - шаровое соединение;
37 - подпятник;
38 - штуцера;
39 - гидрошланги;
40 - планка установочная;
41 - перемычки;
42 - штоки;
43 - кронштейны;
44 - планка поворотная;
45 - втулка поворотная;
46 - гайка;
47 - подшипник;
48 - крышки подшипника;
49 - звезда периферийная;
50 - вал второй;
51, 52 - ведомая и ведущая вторые конические шестерни;
53, 54 - ступица и обойма обгонной муфты;
55, 56 - первая и вторая шестерни;
57 - сегментная шестерня;
58, 59 - первая и вторая зубчатые рейки.
На фиг.4 представлен вид А-А по фиг.3, где позиции 50-59 те же, что на фиг.3.
На фиг.5 представлена конструкция узла выдвижных ориентируемых плавников, где
60 - фланец;
61 - лапки;
62 - втулка верхняя;
63, 64 - верхние и нижние плавники;
65 - втулка с наклонным прорезом.
На фиг.6 представлен вид В-В по фиг.5, где позиции
62-65 те же, что на фиг.5;
66 - палец;
67 - наклонный прорез.
На фиг.7 представлен вид платформы, выполненной в виде герметичной камеры, где позиции 11-50 те же, что на фиг.1 - 4.
68 - герметичная камера;
69 - центральная втулка;
70, 71 - четная и нечетная установочные втулки.
На фиг.8 представлена электрическая схема блока управления, где
Р1-Р6 - первое-шестое реле;
Квк1-Квк6 - первый-шестой концевые включатели;
Пк1-Пк2 - первый и второй переключатели;
Вк - включатель питания электрической схемы.
На фиг.9 представлена последовательность включения нечетных и четных гидроцилиндров (ГЦ1, ГЦ2) в режиме опускания и подъема опор и двигателя для продольного перемещения опор.
На фиг.10 представлена последовательность чередования циклов, которая задается блоком управления изменением направления движения шагающего вездехода (фиг.8).
Принцип работы шагающего вездехода (ШВХ), конструкция которого представлена на фиг.1 - 4, заключается в следующем.
Если ШВХ предназначен только для продвижения по суше, платформа 1 может быть выполнена в виде плоской пластины формы круга или шестигранника. Если ШВХ предназначен для продвижения по суше и воде, то платформа 1 должна иметь форму, обтекаемую со всех сторон, типа «летающей тарелки». Причем она должна быть полой и герметичной. Объем ее должен быть таким, чтобы под весом всех элементов конструкции ШВХ платформа погрузилась в воду на половину своего объема. В центре платформы установлен центральный узел изменением направления опор, кинематически связанный с шестью периферийными узлами гидротелескопических опор (ГТО1 и ГТО2), установленными по кругу через равные угловые промежутки (60°).
Платформе 1 первоначально передается горизонтальное положение, и она держится на трех выдвижных телескопических (например, на четных) опорах ГТО2. Три другие - нечетные - опоры ГТО1 должны находиться в поднятом положении. После одного цикла перемещения вперед, нечетные опоры опускаются вниз до прикосновения с земной поверхностью, пока не сработают все три концевых включателя опор. После этого четные опоры ГТО2 поднимаются вверх до упора. При этом срабатывают все три верхних концевых включателя. После этого начинается следующий цикл перемещения платформы вперед. Последовательность смены циклов обеспечивается с помощью электрической схемы блока управления изменением направления движения шагающего вездехода, приведенной на фиг.8.
Центральный узел изменением направления опор содержит электродвигатель 19, на валу 21 которого установлена центральная ведущая коническая шестерня 13, которая приводит во вращение шесть ведомых конических шестерен 14, установленных через 60° друг от друга. Вращение от ведомых конических шестерен с помощью шести радиальных валов 15 передается на ведущие периферийные конические шестерни 52, находящиеся в сцеплении с ведомыми периферийными шестернями 51. Вращение ведомых периферийных конических шестерен передается на узлы преобразования вращательного движения в возвратно-поступательное движение опор.
Центральный узел изменением направления опор содержит также неподвижно установленную первую втулку 22 с эквидистантно расположенными радиальными отверстиями 25, которые находятся на двух уровнях. На этой втулке соосно установлены вторая 23 и третья 24 втулки с возможностью свободного вращения, на которых установлены первый 26 и второй 27 отжимные фиксаторы и звезды.
Каждый отжимной фиксатор состоит из рукоятки 28 с фиксирующим наконечником 29. Фиксатор крепится на втулке с помощью колпака 32. На стержень 30 надета цилиндрическая пружина 33, которая опирается в гайку 31, накрученную на конец стержня 30. Под воздействием пружины наконечник 29 стержня заходит в радиальное отверстие 25 и фиксирует угловое положение соответствующей звезды 23 или 24.
Для изменения направления движения ШВХ достаточно вытянуть отжимной фиксатор и повернуть с помощью рукоятки 26 (28) соответствующую звезду 23 (24) на нужный угол. В соответствии с кинематической цепной связью между центральной звездой и периферийными звездами 49, приведенной на фиг.1, при повороте центральной звезды на угол φ по часовой стрелке периферийная звезда поворачивается на такой же угол φ против часовой стрелки. В этом же направлении будет шагать ШВХ в следующий цикл продольного движения. При выключенном переключателе Пк1 (Пк2) ШВХ остановится и будет ждать изменения направления движения оставшихся трех выдвижных ГТО. После установки обеих ручек отжимных фиксаторов в одинаковое угловое положение ШВХ будет шагать вдоль установленного направления.
Для изменения направления движения ШВХ необходимо, чтобы при выключенном переключателе Пк2 с помощью отжимного фиксатора 26 и трех периферийных звезд одновременно изменить во всех трех четных периферийных узлах ориентацию узлов изменения направления движения опор, на которых установлены преобразователи вращательного движения в возвратно-поступательное движение, т.е. ориентация пластин, на которых установлены параллельные зубчатые рейки.
После одного цикла продольного движения ШВХ при выключенном переключателе Пк1 процесс последовательного переключения на реле Р3 (фиг.8) приостанавливается и ждет операцию изменения направления движения в следующих трех нечетных периферийных узлах. После установки с помощью второго отжимного фиксатора и второй центральной звезды необходимой ориентации нечетных узлов изменения направления движения опор все шесть пар зубчатых реек устанавливаются параллельно друг другу. После этого второй переключается, Пк2 устанавливается в положение «Включено» и ШВХ продолжает свое поступательное движение во вновь заданном направлении.
Принцип работы узла преобразования вращательного движения в возвратно-поступательное движение опор (см. фиг.4) заключается в следующем. Узел включает в себя сегментную шестерню 57, установленную неподвижно на ступице 53 обгонных муфт. При этом крепление сегментной шестерни на ступице должно быть таким, чтобы в начале рабочего хода в первоначальный момент сцепления сегментная шестерня и шестерни с прямыми зубьями 55, 56, установленные на обоймах 54 соответствующих обгонных муфт, были расположены по одной прямой и коснулись зубчатых реек 58, 59 одновременно. В процессе рабочего хода обе шестерни 53, 55 (или 56) работают параллельно и создают положительный момент вращения на выходном валу.
В конце рабочего хода зубчатых реек 58, 59 сегментная шестерня 57 выходит из сцепления с зубчатыми рейками. При этом шестерня 56, установленная на обойме 54 обгонной муфты, вхолостую вращается в обратном направлении. Сжатая пружина 33, надетая на шток, придает рейке обратный ход.
После начала обратного хода зубчатой рейки сегментная шестерня 57 входит в сцепление со второй зубчатой рейкой 59 (см. фиг.4) и создает положительный момент вращения на выходном валу.
Таким образом, поочередное сцепление сегментной шестерни с соответствующими двумя зубчатыми односторонними рейками (см. фиг.4) обеспечивает возвратно-поступательное движения опор.
Таким образом, в случае применения двух параллельных односторонних реек 58, 59 одна сегментная шестерня 57 входит в сцепление по очереди с двумя зубчатыми рейками, перемещающимися в прямом и обратном направлениях.
Сегментная шестерня 57 установлена на ступицах 53 двух обгонных муфт, входящих в сцепление с обоймами 54 в двух противоположных направлениях. Сегментная шестерня входит в сцепление с зубчатыми рейками 58, 59 по очереди. Для этой цели зубчатые рейки сдвинуты относительно друг друга в поперечном направлении (см. фиг.4).
Узел выдвижных ориентируемых плавников функционирует следующим образом. Фланец 60 со втулкой 62 с помощью трех лапок 61 крепится к планке с возможностью свободного поворота в пределах 0÷90° вокруг верхнего гидроцилиндра. Верхняя втулка 62 имеет форму цилиндра, к которой крепятся плоские верхние плавники. По внешней поверхности втулки 62 свободно ходит вверх-вниз втулка 65 с наклонным прорезом, имеющим форму полуцилиндра. К данной втулке неподвижно закреплены нижние плавники. В опущенном (нижнем) положении нижние плавники частично перекрывают верхние плавники 63. В нижнем конце выдвижного элемента ГТО установлен палец 66, который ходит по наклонному прорезу 67 втулки 65. Палец совершает только возвратно-поступательное движение вверх-вниз. Взаимодействие пальца с наклонным прорезом приводит к повороту втулки и связанных с ним нижних и верхних плавников на 90°. Прорез во втулке должен занимать по окружности угол 90° и обеспечить поворот втулки в пределах угла от 0 до 90°. В крайне нижнем положении пальца 66 плавники ориентируются перпендикулярно направлению движения, т.е. направлению движения зубчатой рейки.
В нижнем конце втулки 65 имеется наклонный паз, проекция которой занимает по окружности сектор 90°. Взаимодействие пальца с наклонным пазом приводит первоначально к повороту нижних плавников на 90° и ориентации их вдоль направления движения, а затем к подъему нижних плавников 64 относительно верхних и наложения их друг на друга.
При выдвижении гидротелескопической опоры вниз первоначально нижние плавники опускаются относительно верхних плавников, а затем под воздействием пальца на наклонный прорез оба плавника поворачиваются на 90° и ориентируются перпендикулярно направлению движения ШВХ.
Верхние плавники, закрепленные на цилиндрической втулке, установлены с возможностью свободного поворота вокруг гидроцилиндра. Нижние плавники закреплены на втулке, верхняя часть которой имеет форму полуцилиндра, переходящего внизу в цилиндрическую форму с наклонным пазом 67, занимающим круговой сектор 90° с добавлением толщины пальца, взаимодействующего с наклонным пазом.
Нижняя втулка 65 насажена на верхнюю втулку 62 с возможностью свободного продольного смещения.
В опушенном положении нижние плавники частично перекрывают верхние плавники, что обеспечивает их одновременный поворот относительно гидротелескопической системы.
Наклон паза должен быть направлен так, чтобы после ориентации обоих плавников перпендикулярно направлению движения ШВХ верхняя часть втулки 65 (полуцилиндр) оказалась ориентированной по направлению плавания ШВХ. При таком положении втулки под давлением воды на нижний плавник полуцилиндр прижимается к гидротелескопическому упору.
Гидроскопические опоры могут иметь конструкцию, аналогичную конструкции гидроцилиндров двустороннего действия (см. Анурьев В.И. Справочник конструктора машиностроителя. Том 3, стр.413-422. М., Машиностроение, 1980 г.). Поршень используется в качестве выдвижного элемента телескопической опоры.
Когда палец находится в верхнем положении, плавники ориентируются вдоль движения. При этом нижние плавники приподняты и перекрывают собой верхние плавники. При поднятых нижних плавниках и ориентированных вдоль направления движения они не препятствуют перешагиванию через препятствия при движении по суше и создают минимальное сопротивление при плавании по воде. Профиль плавников должен иметь обтекаемую форму, чтобы уменьшить лобовое сопротивление при их поступательном движении в воде.
Для плавания ШВХ по воде он должен обладать положительной плавучестью. Для этой цели к платформе могут быть закреплены герметичные камеры (понтоны) необходимого объема. Они могут быть закреплены в центре или по периферии. Положительную плавучесть можно достичь, если платформе придать форму обтекаемой со всех сторон герметичной камеры (формы летающей тарелки). Под весом всех элементов конструкции ШВХ платформа должна быть подпружинена в воду на половину своего объема.
При движении плавников, ориентированных перпендикулярно направлению движения, вперед платформа ШВХ будет двигаться назад. Воздействие плавников на платформу аналогично воздействию весел на лодку.
Изменение направления движения ШВХ в режиме плавания осуществляется аналогично изменению направления движения вездехода по суше. Только перемещение по суше вперед соответствует плаванию ШВХ назад, т.е. в обратном направлении.
В шагающем вездеходе полный период движения складывается из следующих восьми циклов, повторяющихся строго в заданной последовательности.
Начало и конец циклов 1-3, 5-7 можно тактировать с помощью трех последовательно соединенных концевых микропереключателей, которые переключают самоблокирующие реле (элемент И).
Контакты реле включают в заданной последовательности цепи питания электродвигателей, выполняющих определенные операции.
Процесс перемещения шагающего вездехода (ШВХ) состоит из восьми циклов, строго следующих один за другим. Этот процесс можно запрограммировать с помощью электрической схемы, приведенной на фиг.8. Электрическая схема состоит из шести электрических самоблокирующихся реле, которые последовательно включаются при замыкании концевых включателей (Квк1-Квк6). Последовательное переключение обеспечивается путем размыкания нормально замкнутых контактов, через которые замыкается цепь питания реле предыдущего цикла.
Следующая последовательность цикла:
1. Опускание нечетных опор до замыкания трех концевых включателей. Эта операция осуществляется при нажатии концевого включателя Квк1 с помощью реле Р1, замыкающего цепь питания первых гидротелескопических опор (ГТО). После того как сработают все три концевых переключателя, соединенных друг с другом последовательно (операция «И»), на схеме 8, заменено одним включателем Квк2, срабатывает реле Р2. Аналогичным образом роль Квк1 играют три последовательно включенных концевых включателя, которые срабатывают после шестого цикла и при полном опускании четных ГТО2.
2. Контактами Р2 происходит самоблокировка Р2′. Реле Р2 своими контактами включает цепи питания трех четных гидротелескопических опор (ГТО2). Четные опоры опускаются до тех пор, пока не сработают все три последовательно соединенных концевых включателя (заменены одним включателем Квк3).
3. При включении Квк1 срабатывает реле Р3, которое самоблокируется контактами Р3′ и размыкает контактами Р3′′ цепь питания Р2.
Реле Р3 включает электродвигатель ЭД1, который вращает через коническую пару шестерен радиальные валы, которые через вторые конические пары шестерен приводят во вращение шестерни узлов преобразования вращательного движения в возвратно-поступательное (см. фиг.4).
В результате платформа перемещается вперед относительно неподвижных четных ГТО1. В то же самое время поднятые четные ГТО2 вхолостую перемещаются обратно до упора, пока не сработают все три концевых включателя. Перемещение платформы вперед также приводит к срабатыванию трех концевых включателей. Все шесть концевых включателя включены последовательно (образуют элемент «И») и заменены одним включателем Квк4.
4. Включение включателя Квк4 приводит к срабатыванию реле Р4, который самоблокируется и разрывает цепь питания реле Р3. Реле Р4 включает цепи питания трех ГТО2.
При этом четные гидротелескопические опоры опускаются до соприкосновения с земной поверхностью и не сработают концевые включатели. Концевой включатель должен сработать после обеспечения надежного контакта подпятника с земной поверхностью. Для этой цели может быть использована пружина, которая должна сжиматься до определенного давления, прежде чем замкнутся контакты включателя. Подбирая жесткость пружины, возможно обеспечить необходимое усилие на каждом из трех опор.
После включения всех трех последовательно включенных концевых включателей (заменен элементом «И» - Квк5) срабатывает реле Р5.
5. Реле Р5 самоблокируется и размыкает цепь питания Р4. Контактами Р5′′′ замыкается цепь питания трех нечетных ГТО1. После чего опускаются все три нечетных гидротелескопических опора до земной поверхности. После обеспечения надежного контакта с землей срабатывают все три концевых включателя, которые заменены одним включателем Р6.
6. Реле Р6 самоблокируется и включает своими контактами Р6′′′ цепь питания электродвигателя ЭД.
При этом платформа передвигается вперед на трех нечетных опорах. Одновременно поднятые четные опоры возвращаются обратно в исходное положение.
Процесс перемещения прекращается после того, как сработают все шесть концевых включателя, которые заменены включателем Квк1.
При включенном переключателе Пк2 срабатывает реле Р1 и происходит полное повторение всех шести циклов. Это приводит к поступательному прямолинейному перемещению шагающего вездехода, переступая препятствия на своем ходу.
Изменение направления движения ТТТВХ может быть осуществлено после третьего или шестого циклов. Для этой цели на фиг.8 используются переключатели Пк1 и Пк2, которые прерывают движение после третьего и шестого циклов. Для изменения направления движения ШВХ используется узел изменения направления движения, представленный на фиг.3.
Шагающий вездеход позволяет легко осуществить дистанционное управление его движением по поверхности планет, под водой, в среде с повышенной радиацией и температурой, в бактериальной среде и т.д. ШВ может быть использован также для ликвидации взрывных устройств, для обзора и передачи телевизионной информации с поля боя и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| ВОЛНОВОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2373424C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2009 |
|
RU2386066C1 |
| ВОДНОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2361109C1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |
| КОЛЕБЛЮЩИЙСЯ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2008 |
|
RU2386855C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2004 |
|
RU2280782C2 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА (ВАРИАНТЫ) | 2009 |
|
RU2387434C1 |
| ВОДНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2008 |
|
RU2370661C1 |
Шагающий вездеход относится к транспортным устройствам и может быть применен в качестве шагающего робота. Шагающий вездеход содержит платформу, двигатель, приводы и связанные с ними опоры. Вездеход содержит дополнительно блок управления изменением направления движения шагающего вездехода и кинематически связанные центральный узел изменения направления движения опор, выполненных в виде шести периферийных гидротелескопических опор, взаимодействующих с соответствующими узлами преобразования вращательного движения в возвратно-поступательное движение. Технический результат - упрощение конструкции и повышение проходимости шагающего вездехода. 7 з.п. ф-лы, 10 ил.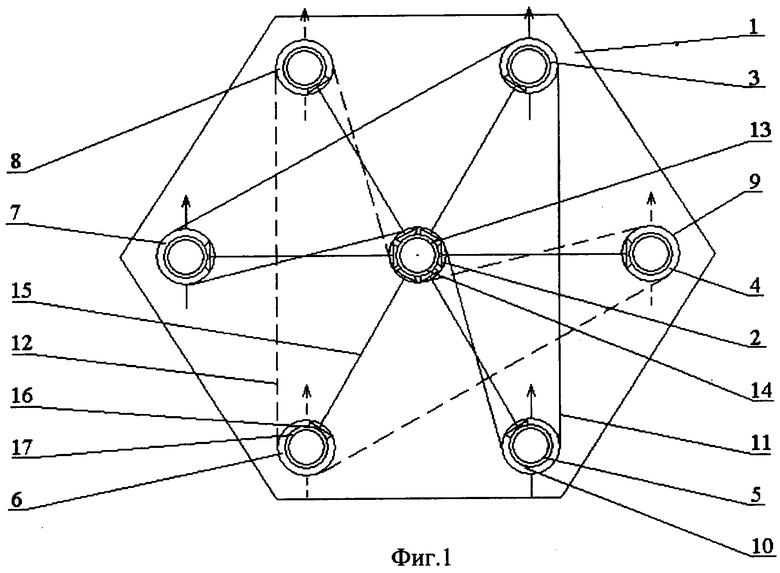
1. Шагающий вездеход, содержащий платформу, двигатель, приводы и связанные с ними опоры, отличающийся тем, что содержит дополнительно блок управления изменением направления движения шагающего вездехода и кинематически связанный центральный узел изменения направления движения опор, выполненных в виде шести периферийных гидротелескопических опор, взаимодействующих с соответствующими узлами преобразования вращательного движения в возвратно-поступательное движение.
2. Шагающий вездеход по п.1, отличающийся тем, что центральный узел изменения направления движения гидротелескопических опор содержит первую и вторую звезды, установленные на неподвижной втулке с радиальными отверстиями с возможностью свободного вращения, угловое положение которых устанавливается подпружиненными отжимными фиксаторами, при этом первая звезда через первую цепь взаимодействует с периферийными звездами узлов изменения направления нечетных гидротелескопических опор, а вторая звезда через вторую цепь - с периферийными звездами узлов изменения направления движения четных гидротелескопических опор.
3. Шагающий вездеход по п.1, отличающийся тем, что приводы периферийных гидротелескопических опор выполнены в виде радиальных шести валов, на концах которых неподвижно установлены конические шестерни, с помощью которых вращение центральной конической шестерни, установленной на валу двигателя, передается на соответствующие узлы преобразователя вращательного движения в возвратно-поступательное движение гидротелескопических опор.
4. Шагающий вездеход по п.1, отличающийся тем, что каждый узел изменения направления движения гидротелескопических опор содержит периферийную звезду, неподвижно связанную с поворотной планкой, на которой установлен с возможностью свободного поворота узел преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор.
5. Шагающий вездеход по п.4, отличающийся тем, что узел преобразования вращательного движения в возвратно-поступательное движение гидротелескопических опор содержит кинематически связанные с двигателем первую и вторую обгонные муфты, на ступицах которых неподвижно установлена сегментная шестерня, а на обоймах их неподвижно установлены первая и вторая шестерни с прямыми зубьями, взаимодействующими с соответствующими зубчатыми рейками, установленными параллельно друг другу с диаметрально противоположных сторон шестерен, причем зубья в сегментной шестерне занимают менее половины делительной окружности, которые взаимодействуют с зубчатыми рейками по очереди, при этом первая и вторая обгонные муфты установлены так, что при движении зубчатой рейки в одном направлении в сцепление входит первая обгонная муфта, а при его обратном движении - вторая.
6. Шагающий вездеход по п.5, отличающийся тем, что гидроцилиндры гидротелескопических опор кинематически связаны с узлами изменения направления движения гидротелескопических опор и преобразования вращательного движения в поступательное движение гидротелескопических опор, взаимодействующих с центральным узлом изменения направления движения опор.
7. Шагающий вездеход по п.6, отличающийся тем, что содержит дополнительно верхние и нижние плоские плавники, установленные на гиротелескопических опорах с возможностью поворота на 90°, при этом нижние плавники установлены неподвижно на втулке с наклонными прорезами, взаимодействие которых с пальцем, неподвижно установленным на нижних наконечниках гиротелескопических опор, обеспечивают подъем и опускание нижних плавников, а также изменение ориентации нижних и верхних плавников на 90°.
8. Шагающий вездеход по п.1, отличающийся тем, что блок управления изменением направления движения шагающего вездехода содержит шесть последовательно переключающихся самоблокирующихся реле, срабатывающих от концевых включателей, обеспечивающих строгую последовательность шести циклов включения двигателя, четных и нечетных гидроцилиндров в режиме опускания и подъема выдвижных гидротелескопических опор, которые могут быть прерваны после третьего и шестого циклов с помощью первого и второго переключателей, для обеспечения поворота четных и нечетных гидротелескопических опор на необходимый угол в пределах от 0 до ±180°.
| Шагающее устройство | 1978 |
|
SU892057A1 |
| RU 2004112265 А, 27.10.2005 | |||
| US 5219410 А, 15.01.1993. | |||

