Область техники
Настоящее предлагаемое изобретение относится к геофизике, к области морской геофизической разведки, и к судостроению, к области конструкции подводных лодок.
Уровень техники
Известен способ сейсмической разведки полезных ископаемых на морском дне, в котором надводное судно буксирует сейсмическую косу, выпускаемую из днища судна через цилиндр, нижние края защитных кожухов которого расположены ниже кромки плавающих льдов (1). Известный способ, хотя и может быть применен для работы в северных широтах, - не в состоянии обеспечить разведку на акваториях, покрытых сплошным паковым льдом.
Известен способ морской сейсмической разведки, в котором излучатели и приемники закрепляют на нижней поверхности льда под водой и ведут сейсмическую разведку в процессе дрейфа льдины (2). Понятно, что данный способ не позволит осуществить разведку значительных площадей дна, в т.ч. с высокой точностью расположения сети сейсмических профилей.
Известен способ морской разведки, в котором на поверхности, покрытой льдом, с помощью ледокола прокладывают канал, очищают его ото льда и в канале буксируют сейсмическую косу (3). Данный способ чрезвычайно затратен, не позволяет исследовать большие площади, а также делает невозможной буксировку нескольких сейсмических кос в полосе шире канала чистой воды, что необходимо по технологии 3D-сейсморазведки.
Известно применение гибких протяженных гидроакустических антенн с подводных лодок для обнаружения подводных лодок в океане (4). При этом антенны выпускаются через стабилизаторы кормовой оконечности, а их количество не превышает 1-2. Однако даже если заменить гидроакустическую антенну на сейсморазведочную косу и буксировать за подводной лодкой сейсмический излучатель, то будет реализована только технология 2D-сейсморазведки, а ее эффективность будет несоизмеримо мала с затратами.
Сущность изобретения
В данной заявке решается задача геофизического исследования морских акваторий, лежащих подо льдом, с высокой экономической эффективностью и качеством полученного материала.
Для решения поставленной задачи, в отличие от известного способа ведения трехмерной (3D) геофизической разведки с использованием буксировки за надводным судном нескольких сейсморазведочных приемно-излучающих антенн, последние буксируются подо льдом с помощью подводного судна, передвигающегося лагом на оптимальной геофизической глубине и тянущего за собой антенные косы, выпускаемые с бортовых лебедок, расположенных по длине подводного судна. Кроме того, подводное судно подо льдом работает совместно с надводным ледокольным судном обеспечения - носителем транспортно-спасательных подводных аппаратов, с автономными необитаемыми подводными аппаратами и акустическими маяками в составе гидроакустических навигационных систем на длинной и ультракороткой базе.
Для решения задачи на подводном судне сейсморазведочные антенны намотаны секциями на лебедки, распределенные вдоль бортов, судовые движители хода судна расположены на корме и носу подводного судна с возможностью поворота вектора тяги на любой угол в диапазоне 0-360 градусов, кроме того, на подводном судне расположены движители, создающие векторы тяги вертикального перемещения, что в целом обеспечивает пространственное динамическое позиционирование подводного судна. Подводное судно геофизической разведки имеет симметричный обтекаемый профиль обшивки как в вертикальной плоскости нос-корма, так и в перпендикулярной бортовой плоскости.
Возможность реализации
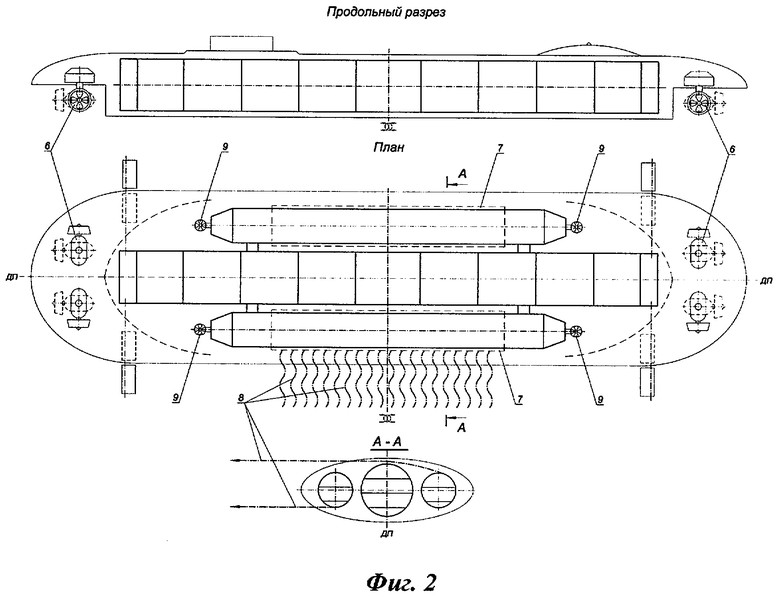
На фиг.1 представлена схема способа проведения подледной геофизической разведки. На фиг.2 представлена принципиальная компоновочная схема подводного геофизического судна.
Технологический комплекс (фиг.1) включает в себя подводное геофизическое судно 1, ледокольное судно обеспечения 2, транспортно-спасательные подводные аппараты 3, автономные необитаемые подводные аппараты 4, донные акустические маяки 5 и акустические маяки на буксируемых антеннах 8.
Подводное геофизическое судно 1 (фиг.2) представляет собой удобообтекаемое тело для движения в воде в продольном (маршевом) и поперечном (лаговом) режимах. Для осуществления этих режимов в кормовой и носовой оконечностях установлены полноповоротные винторулевые колонки 6, которые в зависимости от режима движения или маневрирования создают соответствующее направление тяги движителей.
Для традиционной архитектуры подводных лодок наиболее характерны постановка и выборка гибких буксируемых акустических антенн через стабилизаторы кормовой оконечности.
Для трехмерной детальной геофизической съемки месторождений углеводородов с требуемым качеством необходимо большое количество гибких буксируемых антенн (от не менее 6 до 20), для размещения которых на подводном судне с традиционной для подводных лодок архитектурой в кормовой оконечности нет места.
Для размещения желаемого количества (6, 8 и более) антенн с антенными лебедками на подводном геофизическом судне 1 (фиг.2) используется междубортное пространство по длине судна, где антенные лебедки 7 расположены вдоль борта. Это предопределяет выпуск антенн 8 с борта и буксировку антенн в режиме движения судна лагом с оптимальной для геофизики скоростью (около 3 узлов), при этом одержание судна на заданной глубине и переход по глубине осуществляются за счет вертикальных движителей 9.
Способ проведения подводно-подледной геофизической разведки реализуется следующим образом. Предварительно ледокольное судно обеспечения 2 с помощью бортовых приборов (эхолот, профилограф и др.) и автономных необитаемых подводных аппаратов 4 производит обследование морского дна, осуществляет точную навигационную «привязку» и отмечает донными маяками 5 район проведения геофизической разведки. Подводное геофизическое судно 1 в маршевом режиме выходит в намеченный район и, ориентируясь по донным маякам 5, занимает исходную позицию в режиме подводного динамического позиционирования.
Развернув поворотные винторулевые колонки 6 в положение, обеспечивающее лаговое движение судна 1, производят на ходу вытравливание гибких антенн 8 через бортовые клюзы, сматывая их с антенных лебедок 7.
После вытравливания антенн на заданную длину подводное геофизическое судно 1 проходит в рабочем лаговом режиме над обследуемым районом на заданной глубине, последовательно излучая сигналы и принимая их отражение от неоднородностей под морским дном. Регистрацию и обработку полученных сигналов производят на борту подводного геофизического судна 1 с помощью комплекса геофизической и гидрографической аппаратуры.
После обследования заданного района антенны 8 с помощью антенных лебедок 7 выбирают на борт подводного геофизического судна 1. После выборки антенн судно 1 изменяет режим движения с лагового на маршевый с помощью соответствующего поворота винторулевых колонок 6 и переходит в следующий район или возвращается на базу.
Технологический комплекс для проведения подводно-подледной геофизической разведки морского дна формируют в основном из известных элементов, например:
- подводное геофизическое судно включает все основные базовые решения атомных подводных лодок, дополненные принципиально новыми оригинальными решениями, позволившими осуществить функции подводного носителя - буксировщика мощного антенного комплекса;
- ледокольное судно обеспечения представляет по существу классический ледокол, дооснащенный отсеком с ангарами и спускоподъемным устройством для транспортно-спасательных и автономных необитаемых подводных аппаратов, а также донных маяков, выводимых в подводное пространство через вертикальную шахту в корпусе ледокольного судна, а также комплексом гидрографических приборов и гидроакустических средств связи с подводными объектами.
Реализуемость предлагаемого технологического комплекса с приемлемым для мореплавания уровнем безопасности для проведения подводно-подледной геофизической разведки морского дна не вызывает сомнения. Способ же проведения самой геофизической разведки, методика и аппаратура обработки сигналов во многом идентичны используемым при геофизической разведке с надводных судов, новым же является реализация их с использованием оригинальных проектных решений подводного носителя комплекта буксируемых сейсморазведочных или электроразведочных антенных кос, прежде всего в ранее недоступных районах, закрываемых ледовым покровом большую часть года, например до 10-12 месяцев в году, в Карском, Восточно-Сибирском и Чукотском морях.
Кроме этого, возможность подводного носителя занимать оптимальную глубину при буксировке антенн существенно повышает качество результатов съемки по сравнению с буксировкой антенных кос в приповерхностном слое надводными геофизическими судами, значительно улучшает их помехоустойчивость за счет малошумности подводного судна и исключению влияния волнения моря, что в свою очередь позволяет обеспечивать круглосуточную работу независимо от гидрометеоусловий на поверхности моря.
Наличие же специализированного ледокольного судна обеспечения в составе технологического комплекса позволяет реализовать точную навигационную привязку обследуемых участков морского дна, постоянную двухстороннюю бесперебойную связь с подводным геофизическим судном в подводно-подледном положении, постоянную готовность оказания экстренной помощи подводному судну в нештатных и аварийных ситуациях.
Источники информации
1. Патент России №2317572.
2. Патент России №2076342.
3. Патент России №1835938.
4. Журнал «Зарубежное военное обозрение», №9, 1995, Е.Ряписов «Гидроакустические станции с гибкими протяженными буксируемыми антеннами ВМС США».
5. Журнал IEEE Journal of Ocean Engineering, том 29, №2, 2004, 365-387 (S.G.Lemon, «Towed-Array History, 1917-2003»).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2010 |
|
RU2457515C2 |
| СПОСОБ ПРОВЕДЕНИЯ 3D ПОДВОДНО-ПОДЛЕДНОЙ СЕЙСМОАКУСТИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2011 |
|
RU2485554C1 |
| СПОСОБ ПОДВОДНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621638C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2595048C1 |
| СЕЙСМОГРАФИЧЕСКОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2589242C1 |
| СЕЙСМОГРАФИЧЕСКОЕ СУДНО ДЛЯ СЕЙСМОРАЗВЕДКИ ПО 2D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2013 |
|
RU2539430C2 |
| Способ подводной подледной сейсморазведки и устройство для его осуществления | 2017 |
|
RU2696820C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ | 2013 |
|
RU2549303C2 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
Изобретение относится к области морской геофизической разведки. Сущность: предложено подводное судно геофизической разведки, связанное с приемными антенными косами. Косы намотаны секциями на бортовые лебедки, расположенные в междубортном пространстве судна. Судовые движители хода расположены на корме и носу судна с возможностью поворота вектора тяги на любой угол в диапазоне 0-360°. Судно также оснащено движителями, создающими векторы вертикального перемещения. Геофизическая разведка осуществляется посредством буксировки антенных кос подо льдом при передвижении подводного судна лагом на оптимальной геофизической глубине. Технический результат: повышение экономичности, повышение качества полученного материала. 2 н. и 2 з.п. ф-лы, 2 ил.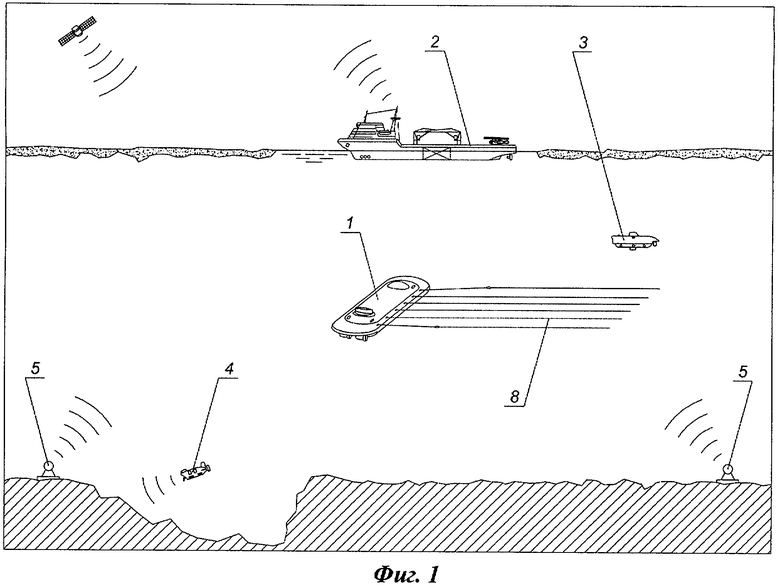
1. Способ ведения сейсмической разведки с использованием буксировки за судном сейсморазведочных приемно-излучающих антенных кос, отличающийся тем, что антенные косы буксируют подо льдом с помощью подводного судна, передвигающегося лагом на оптимальной геофизической глубине и тянущего за собой антенные косы, выпускаемые с бортовых лебедок, расположенных по длине подводного судна.
2. Способ по п.1, отличающийся тем, что подводное судно подо льдом работает вместе с ледокольным судном обеспечения - носителем транспортно-спасательных подводных аппаратов, автономными необитаемыми подводными аппаратами, донными и буксируемыми акустическими маяками.
3. Подводное судно сейсмической разведки для осуществления способа по пп.1 и 2, связанное с приемными антенными косами, отличающееся тем, что сейсморазведочные косы намотаны секциями на бортовые лебедки, расположенные в междубортном пространстве по длине судна, судно содержит судовые движители хода, расположенные на его корме и носу с возможностью поворота вектора тяги на любой угол в диапазоне 0-360°, а также движители, создающие векторы вертикального перемещения, вместе обеспечивающие пространственное динамическое позиционирование подводного судна.
4. Подводное судно сейсмической разведки по п.3, отличающееся тем, что оно имеет симметричный обтекаемый профиль обшивки как в вертикальной плоскости нос - корма, так и в перпендикулярной бортовой плоскости.
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2006 |
|
RU2317572C1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1992 |
|
RU2076342C1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ НА АКВАТОРИЯХ С ЛЕДОВЫМ ПОКРОВОМ | 1990 |
|
SU1835938A1 |
| US 2002174817 A1, 28.11.2002 | |||
| Система для управления морскими сейсмическими исследованиями | 1986 |
|
SU1376052A1 |
| US 6012406 A, 11.01.2000 | |||
| МХРА 05005913 А, 04.07.2007. | |||

