Изобретение относится к области морской техники и предназначено для освещения подводной обстановки.
Известно, что для наблюдения за подводной средой на флотах мира используют различные измерительные устройства, основанные на регистрации в водной среде объектов и присущих им физических полей. Из-за особенностей распространения в воде различных видов энергии наиболее широкое распространение получили гидроакустические средства наблюдения, основанные на законах распространения в воде звука.
Для поиска подводных объектов применяются корабли, авиация, стационарные системы, а также подводные аппараты, оснащаемые средствами обнаружения, в качестве которых используют гидроакустические станции (ГАС) или комплексы, радиогидроакустические буи (РГБ), взрывные источники звука [Военно-морской словарь /Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 13, 75, 352], или приборы, измеряющие различные физические поля, присущие подводным объектам, например, магнитометры [Б.И. Родионов. Противолодочные силы и средства флотов. - М: Воениздат, 1977].
Множество элементов, находящихся в закономерных отношениях и связях друг с другом, образующих определенную целостность, единство и подчиненность определенному организующему признаку, представляют собой систему, а в совокупности со способами и правилами их использования - смешанную систему [Система. Военно-морской словарь /Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. С. 391]. Применяемые для поиска корабли, авиация, стационарные системы, а также технические устройства (ГАС, РГБ и подводные аппараты) входят составляющими элементами в создаваемые мобильные и стационарные системы освещения подводной обстановки. Время функционирования системы освещения подводной обстановки может составлять от нескольких часов до нескольких суток на период выполнения ею поисковых задач (носители с ГАС, РГБ), а также достигать нескольких месяцев и даже лет (подводные аппараты с большой автономностью и стационарные ГАС).
Существующие средства поиска и освещения подводной обстановки зачастую демаскируют себя работой устройств, излучающих различные шумы. Стационарные пассивные средства наблюдения менее заметны для объектов поиска, но отсутствие мобильности является их недостатком.
Относительно малую заметность имеют самоходные подводные аппараты, разрабатываемые для океанологических исследований и морской геологоразведки с конца 1960-х гг. [Автономные подводные аппараты. Материалы сайта Института проблем морских технологий Дальневосточного отделения РАН, 2002]. В настоящее время самоходные необитаемые подводные аппараты (НПА) считаются в ведущих морских державах приоритетным направлением, они применяются с надводных кораблей и подводных лодок, как например, автономные НПА «Манта», разработанные в США и предназначенные для обнаружения и уничтожения подводных лодок, мин и других подводных целей, а также для ведения разведки и решения обеспечивающих и специальных задач [И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88], [Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008].
Самоходные НПА имеют корпус обтекаемой цилиндрической или иной формы, средства движения и энергообеспечения, гидроакустические и телевизионные средства поиска подводных объектов, навигационное оборудование, средства связи, отсек для полезной нагрузки, приборы управления. Для передачи на пункт управления информации об обнаруженных подводных объектах, а также для дистанционного управления НПА они оборудуются аппаратурой радио и гидроакустической связи или акустическим модемом [Акустический модем АМ-300. http://www.diveservice.ru/]. Точность координат объектов, обнаруживаемых НПА, зависит от продолжительности использования навигационной системы в автономном режиме. Для уменьшения ошибок НПА дополнительно оснащают системой спутниковой навигации и устанавливают периодичность сеансов связи со спутниками для уточнения своего местоположения в зависимости от требуемой точности навигации и характеристик навигационной системы.
В настоящее время НПА все активнее применяются в арктических районах для ведения океанографических исследований и поисковых работ. С 2001 г. в США проводится серия экспериментов для исследования толщины льда с подводных аппаратов ALTEX (Atlantic Layer Tracking Experiment) [Подводные аппараты в высоких широтах. htpp://www.pro-arctic.ru/05/06/2015/…]. Разработанный в рамках данной программы самоходный автономный НПА ALTEX имеет двенадцать отделяемых радиобуев, служащих для передачи на пункт управления записей наблюдений НПА и координат всплывших буев. Радиобуи способны проплавлять лед и выносить на его поверхность связную антенну и антенну спутниковой навигационной системы (СНС). Перед выпуском радиобуя НПА снижает скорость хода до 1 уз, переходит на глубину 50 м и обследует ледяной покров. Обнаружив подходящее место, где толщина льда не превышает 1 м, НПА выпускает радиобуй, который приледняется к нижней кромке льда, раздвигает телескопический корпус и подает к точке соприкосновения со льдом гидрореагирующий химический состав Pyrosolve-Z, запускающий при взаимодействии с морской водой экзотермическую химическую реакцию. Располагаемой массы химического состава в радиобуе достаточно для проплавления льда толщиной 1 м, после чего в образовавшееся отверстие из радиобуя на поверхность выдвигается антенна [В.А. Катенин, А.В. Катенин. Минная угроза и навигационно-гидрографическое обеспечение противоминных действий // Оборонный заказ, интернет-приложение №15, 2007. http://www.ozakaz.ru/index. php/articles/n-15-06-2007/167-2011 -03-26-18-16-34].
Известен способ освещения подводной обстановки, принятый за прототип изобретения, основанный на применении автономных необитаемых подводных аппаратов. Способ включает применение подводных аппаратов с переменной плавучестью - глайдеров, которые имеют бортовую систему обнаружения цели, содержащую гибкую протяженную буксируемую антенну и не менее одного отделяемых подледных радиобуев. Перед выпуском подводного аппарата с носителя в его бортовую систему управления вводят маршрутное задание. После выпуска подводного аппарата на пункте управления с помощью доступных средств контролируют точность его движения на маршруте.
С обнаружением подводного объекта производят его классификацию, записывают информацию в запоминающее устройство радиобуя и передают ее на пункт управления, для чего осуществляют всплытие подводного аппарата на глубину обследования толщины ледового покрова, обследуют ледяной покров и в месте, где толщина льда соответствует заданной, отделяют радиобуй от корпуса подводного аппарата. Под действием положительной плавучести производят всплытие радиобуя и его приледнение к нижней кромке льда, задействуют устройство для плавления льда и проплавляют в нем отверстие, в которое выдвигают антенну, поднимают ее на поверхность и передают информацию о подводном объекте на спутник или летательный аппарат для последующей передачи на пункт управления [Патент RU 2655592. Способ и устройство освещения подводной обстановки/ Новиков А.В., Иванов А.В., Рогульский О.Э. М.: ФИПС, 2018. Бюл. №16].
Используемый для рассмотренного способа подводный аппарат с переменной плавучестью - глайдер, принимается за прототип изобретения устройства, служащего для реализации способа освещения подводной обстановки. Он имеет бортовую систему управления и курсоуказания, гибкую протяженную буксируемую антенну (ГПБА) для обнаружения подводных объектов, устройство для определения толщины льда, а также узел крепления к корпусу не менее одного отделяемых подледных радиобуев с запоминающим устройством, связанным с бортовой системой управления глайдера, и устройством для плавления льда [Патент RU 2655592. Способ и устройство освещения подводной обстановки/ Новиков А.В., Иванов А.В., Рогульский О.Э. М.: ФИПС, 2018. Бюл. №16].
Рассмотренные в качестве прототипов изобретения способ и устройство освещения подводной обстановки, имеют существенные недостатки. Так для глайдера, являющегося подводным планером, характерна низкая маневренность, обусловленная малой скоростью не более 1 м/с, а также постоянное изменение глубины погружения вследствие движения глайдера вверх или вниз по траектории планирования. В связи с этим глайдер не в силах обеспечить при освещении подводной обстановки необходимую продолжительность наблюдения за обнаруженными подводными объектами на заданном горизонте глубин. Кроме того, при вертикальном маневрировании глайдера или подводного объекта, последний может выйти из зоны наблюдения гибкой протяженной буксируемой антенны глайдера из-за особенностей распространения звука в воде, например, при пересечении горизонта слоя скачка скорости звука.
Таким образом, для устранения указанных недостатков при освещении подводной обстановки необходимо использовать более маневренный подводный аппарат, способный обеспечивать освещение подводной обстановки длительное время на заданном горизонте глубин.
Целью группы изобретений является разработка способа освещения подводной обстановки и устройства для его осуществления, которые позволят обнаруживать подводные объекты в морском районе с ледовым покрытием, осуществлять наблюдение за ними продолжительное время во всем диапазоне заданных глубин и передавать информацию об обнаруженных объектах на пункт управления.
Предлагается способ освещения подводной обстановки с применением автономного необитаемого подводного аппарата, имеющего бортовую систему обнаружения цели, содержащую гибкую протяженную буксируемую антенну и не менее одного отделяемых подледных радиобуев с устройством для плавления льда. Перед пуском подводного аппарата в его бортовую систему управления вводят маршрутное задание и выпускают на маршрут. В заданной точке подключают гибкую протяженную буксируемую антенну и осуществляют с ее помощью прослушивание водной среды и поиск подводных объектов. С обнаружением подводного объекта производят его классификацию, записывают информацию в запоминающее устройство радиобуя и передают ее на пункт управления, для чего производят всплытие подводного аппарата на глубину обследования толщины ледового покрова, обследуют ледяной покров и в месте, где толщина льда соответствует заданной, отделяют радиобуй от корпуса подводного аппарата. Под действием положительной плавучести производят всплытие радиобуя и его приледнение к нижней кромке льда, задействуют устройство для плавления льда и проплавляют в нем отверстие, в которое выдвигают антенну, поднимают ее на поверхность, где уточняют координаты буя с помощью спутниковой навигационной системы и передают информацию об обнаруженном подводном объекте на пункт управления или на космический или воздушный летательный аппарат, который используют в качестве ретранслятора.
Дополнительно в качестве автономного необитаемого подводного аппарата применяют самоходный подводный аппарат, имеющий энергетический отсек, двигатель, движитель и устройство выдвижения гибкой протяженной буксируемой антенны, при необходимости для классификации и поиска подводных объектов задействуют бортовой гидролокатор и отделяемые взрывные источники звука. После выполнения поставленной задачи и/или для перехода в другой назначенный район ГПБА убирают внутрь корпуса НПА и осуществляют переход в назначенный район с заданной скоростью.
В качестве устройства для реализации способа освещения подводной обстановки предлагается подводный аппарат, имеющий бортовую систему управления и курсоуказания, гибкую протяженную буксируемую антенну для обнаружения подводных объектов, устройство для определения толщины льда и не менее одного подледных радиобуев, отделяемых от подводного аппарата, имеющих устройство для плавления льда и запоминающее устройство, связанное с бортовой системой управления подводного аппарата.
Дополнительно подводный аппарат оснащается энергетическим отсеком, двигателем и движителем для обеспечения необходимой маневренности, устройством выдвижения из корпуса гибкой протяженной буксируемой антенны, активными средствами для поиска и классификации обнаруженных подводных объектов, включающими гидролокатор переднего обзора, гидролокаторы бокового обзора и не менее одного отделяемых взрывных источников звука (ВИЗ), для подъема подводного аппарата из-подо льда и его дальнейшего использования он оснащается одним отделяемым подледным радиобуем, имеющим гибкую связь с подводным аппаратом.
Устройство выдвижения гибкой протяженной буксируемой антенны включает катушку с приводом и антенным отсекателем; трубчатый канал, обеспечивающий перемещение внутри него кабеля антенны и его защиту от попадания в движитель.
Техническое осуществление предлагаемых способа и устройства освещения подводной обстановки иллюстрируется чертежами, на которых:
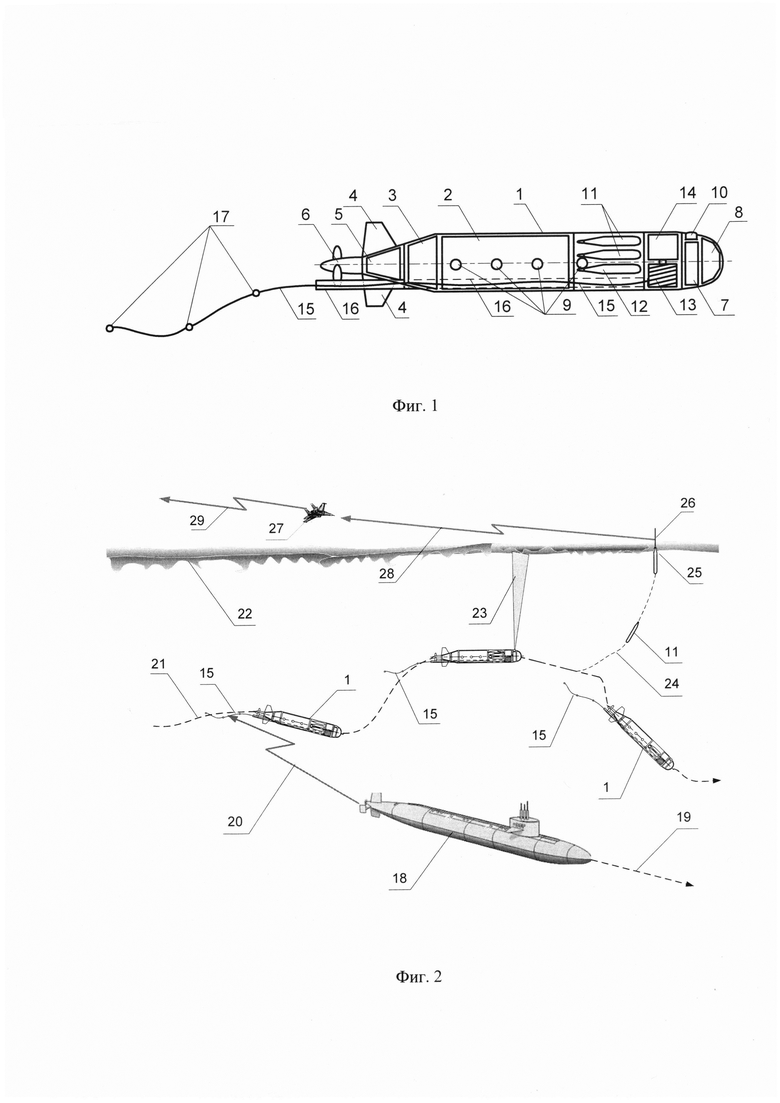
Фиг. 1 - устройство для освещения подводной обстановки;
Фиг.2 - обнаружение подводного объекта подо льдом и передача информации на пункт управления;
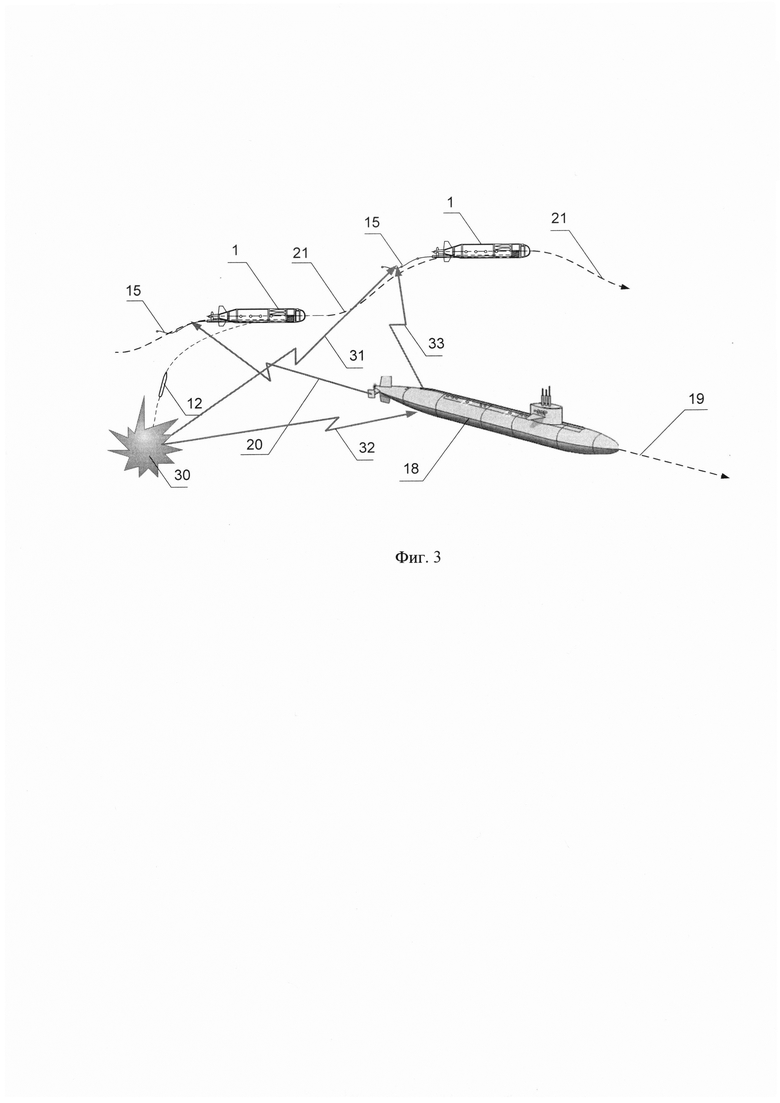
Фиг. 3 - обнаружение подводного объекта с применением ГПБА и ВИЗ.
На фиг. 1 показано устройство для освещения подводной обстановки -самоходный автономный необитаемый подводный аппарат и его основные элементы: 1 - НПА; 2 - энергетический отсек; 3 - двигатель; 4 - стабилизаторы и рули; 5 - рулевые машинки; 6 - движитель; 7 - бортовая система управления и курсоуказания (навигационная система); 8 - гидролокатор переднего обзора (ГПО); 9 - гидролокатор бокового обзора (ГБО); 10 - эхоледомер; 11 - отделяемые подледные радиобуи; 12 - отделяемые взрывные источники звука; 13 - катушка с кабелем гибкой протяженной буксируемой антенны и антенным отсекателем; 14 - электропривод катушки; 15 - кабель гибкой протяженной буксируемой антенны; 16 - трубчатый канал; 17 - гидрофоны ГПБА.
На фиг. 2 показаны действия НПА при обнаружении подо льдом подводного объекта и передачи информации на пункт управления. Цифрами обозначены: 1 - НПА; 11 - отделяемый подледный радиобуй; 15 - кабель гибкой протяженной буксируемой антенны; 18 - подводный объект, обнаруженный НПА; 19 - траектория движения подводного объекта; 20 - воздействие шумов подводного объекта на гидрофоны ГПБА; 21 - траектория движения НПА; 22 - ледяной покров; 23 -обследование эхоледомером толщины льда; 24 - траектория всплытия отделяемого подледного радиобуя; 25 - проплавление во льду отверстия устройством плавления льда радиобуя; 26 - антенна радиобуя, выдвинутая им на поверхность льда в расплавленное во льду отверстие; 27 - летательный аппарат-ретранслятор; 28 -передача на летательный аппарат информации об обнаруженном подводном объекте; 29 - передача информации с летательного аппарата на пункт управления.
На фиг. 3 приведена схема действий НПА с применением ГПБА и ВИЗ для обнаружения подводного объекта и его классификации. Цифрами обозначены: 1 - НПА; 12 - отделяемый ВИЗ; 15 - кабель ГПБА; 18 - подводный объект; 19 - траектория движения подводного объекта; 20 - воздействие шумов подводного объекта на гидрофоны ГПБА; 21 - траектория движения НПА; 30 - срабатывание ВИЗ; 31 - воздействие взрывной волны ВИЗ на гидрофоны ГПБА; 32 - воздействие взрывной волны ВИЗ на корпус подводного объекта; 33 - воздействие отраженной от корпуса подводного объекта взрывной волны ВИЗ на гидрофоны ГПБА.
Способ освещения подводной обстановки и работа подводного аппарата при этом осуществляются следующим образом. После ввода в НПА маршрутного задания и выпуска его с носителя НПА следует в заданный район, в назначенной точке выпускает через трубчатый канал (16) кабель ГПБА (15) с закрепленными на нем гидрофонами (17) и приступает к поиску подводных объектов путем прослушивания окружающего пространства гидрофонами ГПБА. При обнаружении шумов (20) подводного объекта (18) НПА следует за ним и классифицирует обнаруженную цель, записывая информацию в запоминающее устройство бортовой системы управления (7). Через установленный промежуток времени НПА записывает информацию о цели в запоминающее устройство первого отделяемого подледного радиобуя (11), всплывает на глубину для обследования толщины льда эхоледомером (10) и в месте, где толщина льда соответствует заданной, выпускает его в воду. При этом НПА, по возможности, продолжает вести наблюдение за подводным объектом с помощью ГПБА. Выпущенный буй всплывает под лед, задействует устройство для плавления льда, проплавляет во льду отверстие (25) и выдвигает антенну (26) на поверхность, где уточняет по СНС свои координаты и передает информацию о цели на пункт управления или на космический или патрульный летательный аппарат (27). В случае необходимости, например, при потере контакта с целью, НПА задействует активные средства поиска гидролокаторы (8) и (9) и/или ВИЗ (12). Для применения ВИЗ НПА выпускает его в воду, ВИЗ погружается и через установленное время взрывается (30). Взрывная волна воздействует на корпус подводного объекта (32), на гидрофоны ГПБА (31), а также повторно на гидрофоны ГПБА после отражения от корпуса подводного объекта (33), в результате чего в бортовой системе управления НПА (7) по разности во времени между приходом звуковых волн (31) и (33) и их направлений вычисляют координаты подводного объекта.
После выполнения задания гибкую протяженную буксируемую антенну (15) выбирают на борт НПА с помощью привода (14) и катушки (13) и направляют НПА в точку встречи с носителем для подъема на борт. При невозможности выборки антенны ее сбрасывают в воду с применением антенного отсекателя.
Если подъем подводного аппарата на борт носителя по разным причинам не возможен, то отделяют от подводного аппарата подледный буй с гибкой связью, соединяющей его с подводным аппаратом, поднимают буй на поверхность воды или приледняют к нижней кромке льда и проплавляют во льду отверстие, выдвигают на поверхность антенну и передают на пункт управления координаты подводного аппарата, извлекают подводный аппарат из воды или из-подо льда транспортным средством, предназначенным для этого и доставляют его в назначенное место.
Техническими результатами предложенных способа освещения подводной обстановки и устройства для его реализации, в качестве которого используется самоходный необитаемый подводный аппарат, являются обеспечение необходимого наблюдения за подводной средой на заданных горизонтах глубин в покрытых льдами районах с помощью ГПБА, обнаружения в них маневрирующих подводных объектов, передача о них информации на пункт управления, а также возможность по окончании работ убирать ГПБА на борт НПА и возвращать подводный аппарат для его дальнейшего использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| Автономное устройство обнаружения нарушителей на морском участке границы | 2022 |
|
RU2785655C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПОДЪЕМА ИЗ-ПОДО ЛЬДА | 2019 |
|
RU2729852C1 |
| РАДИОБУЙ ПОДВОДНОГО ПЛАВСРЕДСТВА ПОДЛЕДНЫЙ | 2018 |
|
RU2690788C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| МОБИЛЬНАЯ СИСТЕМА ОХРАНЫ МОРСКОГО РАЙОНА | 2023 |
|
RU2819811C1 |
Группа изобретений относится к области морской техники и предназначено для освещения подводной обстановки. Устройство освещения подводной обстановки представляет собой подводный аппарат, имеющий бортовую систему управления и курсоуказания, гибкую протяженную буксируемую антенну для обнаружения подводных объектов, устройство для определения толщины льда и не менее одного подледных радиобуев, отделяемых от подводного аппарата с устройством для плавления льда и запоминающим устройством, связанным с бортовой системой управления подводного аппарата. Подводный аппарат дополнительно оснащается энергетическим отсеком, двигателем и движителем для обеспечения необходимой маневренности, устройством выдвижения из корпуса гибкой протяженной буксируемой антенны и активными средствами для поиска и классификации обнаруженных подводных объектов, включающими гидролокатор переднего обзора и гидролокаторы бокового обзора и не менее одного отделяемых взрывных источников звука. Для освещения подводной обстановки в качестве автономного необитаемого подводного аппарата применяют самоходный подводный аппарат, имеющий энергетический отсек, двигатель, движитель и устройство выдвижения гибкой протяженной буксируемой антенны, при необходимости для классификации и поиска подводных объектов задействуют его бортовой гидролокатор и отделяемые взрывные источники звука. После выполнения поставленной задачи и/или для перехода в другой район гибкую протяженную буксируемую антенну убирают внутрь корпуса подводного аппарата и осуществляют его переход в назначенный район с заданной скоростью, если подъем подводного аппарата на борт носителя по разным причинам не возможен, то отделяют от подводного аппарата подледный буй с гибкой связью, соединяющей его с подводным аппаратом. Поднимают буй на поверхность воды или приледняют к нижней кромке льда и проплавляют во льду отверстие, выдвигают на поверхность антенну и передают на пункт управления координаты подводного аппарата. Извлекают подводный аппарат из воды или из-подо льда транспортным средством, предназначенным для этого и доставляют его в назначенное место. Достигается обеспечение необходимого наблюдения за подводной средой на заданных горизонтах глубин в покрытых льдами районах с помощью ГПБА, обнаружения в них маневрирующих подводных объектов и передача о них информации на пункт управления. 2 н.п. ф-лы, 3 ил.
1. Способ освещения подводной обстановки с применением автономного необитаемого подводного аппарата, имеющего бортовую систему обнаружения цели, содержащую гибкую протяженную буксируемую антенну и не менее одного отделяемых подледных радиобуев с устройством для плавления льда, перед пуском подводного аппарата в его бортовую систему управления вводят маршрутное задание и выпускают на маршрут, в заданной точке подключают гибкую протяженную буксируемую антенну и осуществляют с ее помощью прослушивание водной среды и поиск подводных объектов, с обнаружением подводного объекта производят его классификацию, записывают информацию в запоминающее устройство радиобуя и передают ее на пункт управления, для чего производят всплытие подводного аппарата на глубину обследования толщины ледового покрова, обследуют ледяной покров и в месте, где толщина льда соответствует заданной, отделяют радиобуй от корпуса подводного аппарата, под действием положительной плавучести производят всплытие радиобуя и его приледнение к нижней кромке льда, задействуют устройство для плавления льда и проплавляют в нем отверстие, в которое выдвигают антенну, поднимают ее на поверхность, где уточняют координаты буя с помощью спутниковой навигационной системы и передают информацию об обнаруженном подводном объекте на пункт управления или на космический или воздушный летательный аппарат, который используют в качестве ретранслятора, отличающийся тем, что в качестве автономного необитаемого подводного аппарата применяют самоходный подводный аппарат, имеющий энергетический отсек, двигатель, движитель и устройство выдвижения гибкой протяженной буксируемой антенны, при необходимости для классификации и поиска подводных объектов задействуют его бортовой гидролокатор и отделяемые взрывные источники звука, после выполнения поставленной задачи и/или для перехода в другой район гибкую протяженную буксируемую антенну убирают внутрь корпуса подводного аппарата и осуществляют его переход в назначенный район с заданной скоростью, если подъем подводного аппарата на борт носителя по разным причинам не возможен, то отделяют от подводного аппарата подледный буй с гибкой связью, соединяющей его с подводным аппаратом, поднимают буй на поверхность воды или приледняют к нижней кромке льда и проплавляют во льду отверстие, выдвигают на поверхность антенну и передают на пункт управления координаты подводного аппарата, извлекают подводный аппарат из воды или из-подо льда транспортным средством, предназначенным для этого и доставляют его в назначенное место.
2. Устройство освещения подводной обстановки, представляющее собой подводный аппарат, имеющий бортовую систему управления и курсоуказания, гибкую протяженную буксируемую антенну для обнаружения подводных объектов, устройство для определения толщины льда и не менее одного подледных радиобуев, отделяемых от подводного аппарата с устройством для плавления льда и запоминающим устройством, связанным с бортовой системой управления подводного аппарата, отличающееся тем, что подводный аппарат дополнительно оснащается энергетическим отсеком, двигателем и движителем для обеспечения необходимой маневренности, устройством выдвижения из корпуса гибкой протяженной буксируемой антенны, активными средствами для поиска и классификации обнаруженных подводных объектов, включающими гидролокатор переднего обзора, гидролокаторы бокового обзора и не менее одного отделяемых взрывных источников звука, устройство выдвижения гибкой протяженной буксируемой антенны включает катушку с приводом и антенным отсекателем, трубчатый канал, обеспечивающий перемещение внутри него кабеля антенны и его защиту от попадания в движитель, для подъема из-подо льда он оснащается одним отделяемым подледным радиобуем, имеющим гибкую связь с подводным аппаратом.
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ СРЕДЫ РЕАКТИВНЫМ СНАРЯДОМ СО ВЗРЫВНЫМ ИСТОЧНИКОМ ЗВУКА (ВАРИАНТЫ) | 2009 |
|
RU2397916C1 |
| US 4905210 A1, 27.02.1990 | |||
| US 3919684 A1, 11.11.1975. | |||

