Изобретение относится к пневматическим системам торможения транспортных средств и может быть использовано на железнодорожном транспорте в пневматических системам торможения поездов повышенной длины.
Известна система торможения грузовых поездов повышенной длины, в которой реализовано синхронное торможение локомотива и всех вагонов, связанных общей пневматической тормозной магистралью и оборудованных собственными радиоуправляемыми клапанами торможения (US 6275165, В60Т 17/18, 14.08.01). Система позволяет достичь максимального сокращения тормозного пути и продольно-динамических сил, возникающих в составе.
Недостатком известной системы являются большие временные и капитальные затраты на оборудование всего вагонного парка собственными радиоуправляемыми клапанами торможения. Если вагонный парк оборудуется лишь частично, возникают большие задержки с формированием составов из-за поиска и подбора вагонов с собственными радиоуправляемыми клапанами торможения.
Наиболее близким к изобретению является выбранная в качестве прототипа система управления тормозами поездов повышенного веса и длины (СУТП), в которой использован только один дополнительный радиоуправляемый клапан в тормозной магистрали однолокомотивного поезда повышенной длины, установленнный на соединительном тормозном рукаве хвостового вагона (см. описание, приведенное в PortNews 18.09.08). Радиоуправляемый клапан связан радиоканалом цифровой связи с оборудованием головного локомотива. Когда машинист из кабины приводит в действие тормозную систему, начинается параллельное торможение головной и хвостовой частей. Это дает возможность сократить тормозной путь, повышает качество управления автотормозами поездов-тяжеловесов. В свою очередь, это способствует безопасности движения поездов.
Недостатком известной системы является снижение эффективности торможения и опасное возрастание тормозных путей и продольно-динамических сил, возникающих в составе, при использовании этой системы в особо длинных составах, весом свыше 9000 т.
В настоящее время растущий объем перевозок осваивается как за счет увеличения интенсивности движения грузовых поездов, так и поэтапного увеличения их массы и длины, причем как за счет применения системы поездов с рассредоточенными по длине локомотивами, так и за счет однолокомотивных поездов с мощными локомотивами, такими как магистральные газотепловозы и газотурбовозы с мощностью 10000 кВт и более. При этом вес состава может достигать 15000 и более тонн, а длина - 5 километров и более.
Система с рассредоточенными по длине локомотивами требует дополнительных локомотивов и увеличения численности состава локомотивных бригад, а также более сложных устройств управления. Поэтому в большинстве случаев экономически более выгодно использование однолокомотивных поездов с локомотивами повышенной мощности.
Ограниченная скорость распространения тормозной и отпускной волн в тормозной магистрали состава приводит к чрезмерному запаздыванию в сверхдлинных составах в срабатывании и отпускании тормозов вагонов, удаленных от мест установки клапанов торможения. Для каждого сочетания параметров, влияющих на эффективность торможения, имеется своя, целесообразная с экономической точки зрения и с точки зрения допустимости продольно-динамических сил в составе, система расположения дополнительных клапанов торможения по длине поезда (Л.А.Мугинштейн, И.А.Ябко. «Метод анализа продольно-динамических сил в грузовых поездах большой массы и длины»// Железные дороги мира, 02.2003, с.3).
Технический результат предлагаемого изобретения заключается в повышении эффективности управления тормозами однолокомотивного поезда повышенной длины и упрощении тормозной системы за счет использования оптимального количества радиоуправляемых клапанов.
Технический результат достигается тем, что в распределенную систему для управления торможением однолокомотивным поездом повышенной длины, содержащую установленные на локомотиве пульт управления машиниста, соединенный с управляющим вычислительным контроллером, к которому подключены радиомодем, блок спутниковой навигации, блок памяти, датчик скорости и пройденного пути и управляющие клапаны, соединенные с краном машиниста, который соединен с тормозной магистралью и датчиками давления, выходы которых подключены к управляющему вычислительному контроллеру, согласно изобретению введены съемные блоки торможения, каждый из которых состоит из управляющего контроллера с подключенными к нему радиомодемом, датчиками давления и управляющими клапанами, связанными с тройником для подключения к тормозной магистрали, блоки торможения установлены на вагонах в сечениях поезда и подключены к тормозной магистрали.
На чертеже представлена схема распределенной системы для управления торможением однолокомотивным поездом повышенной длины.
Распределенная система для управления торможением однолокомотивным поездом повышенной длины содержит установленные на локомотиве 1 пульт 2 управления машиниста, соединенный с управляющим вычислительным контроллером 3, к которому подключены радиомодем 4, блок 5 спутниковой навигации, блок 6 памяти, датчик 7 скорости и пройденного пути и управляющие клапаны 8, соединенные с краном 9 машиниста, который соединен с тормозной магистралью 10 и датчиками 11 давления, выходы которых подключены к управляющему вычислительному контроллеру 3, съемные блоки 12 торможения установлены на вагонах 13 в сечениях поезда и подключены к тормозной магистрали 10, съемный блок 12 торможения состоит из управляющего контроллера 14 с подключенными к нему радиомодемом 15, датчиками 16 давления и управляющими клапанами 17, связанными с тройником 18 для подключения к тормозной магистрали 10.
Распределенная система для управления торможением однолокомотивным поездом повышенной длины работает следующим образом.
До начала формирования поезда определяют требуемое количество съемных блоков 12 торможения, места их установки и параметры временных последовательностей их включения и отключения. Необходимый расчет осуществляют с помощью ЭВМ (персонального компьютера) с использованием математической модели расчета продольно-динамических сил в составе. При этом учитываются параметры реального профиля пути по маршруту следования поезда, схемы формирования состава, загрузки вагонов, типы вагонов и локомотива, прогноз погодных условий и опытных данных, накопленных в центральной базе данных автоматизированной системы. При формировании состава съемные блоки 12 торможения устанавливаются на вагоны в сечениях поезда согласно произведенному расчету. Подключение съемных блоков 12 торможения к тормозной магистрали 10 выполняется с помощью тройников 18, которые позволяют осуществить оперативное подключение блоков 12 без внесения изменений в конструкцию тормозной арматуры вагонов. Расчетные данные о параметрах временных последовательностей включения и отключения радиоуправляемых блоков 12 торможения, с привязкой к режимам движения поезда и параметрам пути, по маршруту записываются в блок 6 памяти. Если локомотивное устройство управления движением поезда имеет в своем составе устройство автоведения, то записанные в блок 6 памяти расчетные данные используются устройством автоведения для более эффективной работы. При ручном управлении поездом более ограниченный набор параметров может использоваться локомотивной бригадой на критических отрезках пути.
В частном случае, полученные с ЭВМ расчетные данные для состава весом 15000 т следующие:
- минимальное количество блоков 12 торможения 3 шт.;
- место установки -1/3 длины состава, считая от хвостового вагона;
- время задержки на включение относительно клапана торможения, расположенного на локомотиве - 1,6 с;
- время опережения на выключение, относительно клапана торможения расположенного на локомотиве - 1,0 с.
Оборудование локомотива 1 производит периодический опрос съемных блоков 12 торможения, в процессе которого съемные блоки 12 торможения передают с помощью радиомодема 15 данные с датчиков 16 давления, обработанные управляющим контроллером 14.
Протокол радиообмена радиомодемов 4 и 15 на частоте, например, 155 МГц имеет возможность программного выбора одной из нескольких несущих частот, за счет чего обеспечивается разрешение конфликта одновременного доступа в эфир с подавлением сигнала. Кроме того, каждый локомотив имеет уникальный сетевой адрес, состоящий из адреса поезда и адреса локомотива, что обеспечивает защиту от выполнения ложных команд, поданных локомотивами других составов (встречных или находящихся на той же станции). Для обеспечения устойчивости радиообмена реализуется шифрация команд и адресов, присвоение индивидуального логического кода всем локомотивам и поездам, посылаемым перед каждым сообщением. Исполнение команд производится только после неоднократного подтверждения восприятия адресатом, причем принимаются необходимые меры по защите от возможных помех. Имеется резервная частота, например, в диапазоне 2 МГц, на которую предусмотрен автоматический переход при сильных радиопомехах в диапазоне 155 МГц.
Оборудование локомотива 1 выдает команду на выполнение торможения каждому съемному блоку 12 торможения при процедурах торможения, инициируемых машинистом при воздействии на кран 9 машиниста, а также в экстренных случаях при нарушении целостности тормозной магистрали. Информация о местоположении поезда поступает на управляющий вычислительный контроллер 3 с блока 5 спутниковой навигации, а информация о скорости движения поезда и пройденном пути поступает на этот контроллер 3 с датчика 7 скорости и пройденного пути. Эта информация учитывается при формировании команды на управление торможением.
При выполнении распределенного торможения управляющий вычислительный контроллер 3 локомотивного оборудования на основании данных от датчиков 16 давления всех съемных блоков 12 торможения и положения крана 9 машиниста передает посредством радиомодема 4 команду на управление торможением каждому съемному блоку 12 торможения, содержащую информацию о глубине разрядки тормозной магистрали и временных задержках на исполнение команды с учетом профиля пути каждым съемным блоком. Переданные посредством радиомодема 4 команды на управление торможением поступают через радиомодемы 15 на управляющие контроллеры 14, каждый из которых вырабатывает управляющий сигнал с требуемыми (переданными с локомотивного оборудования) параметрами торможения. Этот сигнал поступает на управляющие клапаны 17.
Расположение съемных блоков 12 торможения и параметры временных последовательностей их включения и отключения в тормозной магистрали 10 обеспечивают снижение продольно-динамических сил в составе во всех режимах от отправления до прибытия (разгон поезда, поддержание установленной скорости, торможение до остановки) при обеспечении допустимых скоростей, плавности хода и графика движения.
Эффективное торможение позволяет повысить пропускную способность участков железных дорог за счет повышения маршрутной скорости и повысить безопасность движения за счет предотвращения разрывов межвагонных соединений или схода вагонов с рельсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ У ПУТЕВЫХ УПОРОВ ПРИ ДВИЖЕНИИ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИИ | 2013 |
|
RU2529561C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2012 |
|
RU2513878C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ МАНЕВРОВОГО ЛОКОМОТИВА ПРИ ПРОВЕДЕНИИ МАНЕВРОВ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИЙ | 2010 |
|
RU2436698C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ЛОКОМОТИВОМ И ПОДТАЛКИВАЮЩИМ ЛОКОМОТИВОМ ПОЕЗДА ПО РАДИОКАНАЛУ | 2015 |
|
RU2578640C1 |
| Система управления торможением поезда | 2018 |
|
RU2707155C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2009 |
|
RU2392156C1 |
| УСТРОЙСТВО ИНТЕЛЛЕКТУАЛЬНОЙ БОРТОВОЙ АППАРАТУРЫ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2487035C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
Изобретение относится к железнодорожной технике, в частности к пневматическим системам торможения поездов повышенной длины. Распределенная система для управления торможением однолокомотивным поездом повышенной длины содержит установленные на локомотиве пульт управления машиниста, соединенный с управляющим вычислительным контроллером. К контроллеру подключены радиомодем, блок спутниковой навигации, блок памяти, датчик скорости и пройденного пути и управляющие клапаны, соединенные с краном машиниста. Кран машиниста соединен с тормозной магистралью и датчиками давления, выходы которых подключены к управляющему вычислительному контроллеру. Съемные блоки торможения установлены на вагонах и подключены к тормозной магистрали. Съемный блок торможения состоит из управляющего контроллера с подключенными к нему радиомодемом, датчиками давления и управляющими клапанами, связанными с тройником для подключения к тормозной магистрали. Причем в блок памяти записаны расчетные данные о параметрах временных последовательностей включения и отключения съемных блоков торможения с привязкой к режимам движения поезда и параметрам пути по маршруту. Технический результат изобретения заключается в повышении эффективности управления тормозами однолокомотивного поезда повышенной длины и упрощении тормозной системы. 1 ил.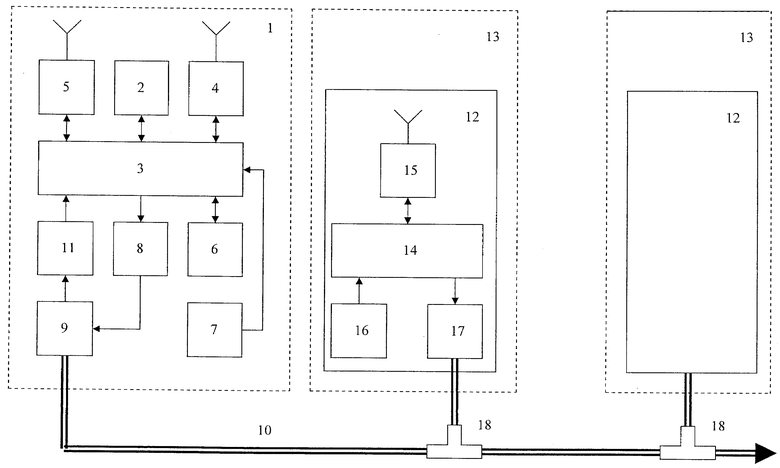
Распределенная система для управления торможением однолокомотивным поездом повышенной длины, содержащая установленные на локомотиве пульт управления машиниста, соединенный с управляющим вычислительным контроллером, к которому подключены радиомодем, блок спутниковой навигации, блок памяти, датчик скорости и пройденного пути и управляющие клапаны, соединенные с краном машиниста, который соединен с тормозной магистралью и датчиками давления, выходы которых подключены к управляющему вычислительному контроллеру, отличающаяся тем, что в нее введены съемные блоки торможения, каждый из которых состоит из управляющего контроллера, с подключенными к нему радиомодемом, датчиками давления и управляющими клапанами, связанными с тройником для подключения к тормозной магистрали, блоки торможения установлены на вагонах и подключены к тормозной магистрали, при этом в блок памяти записаны расчетные данные о параметрах временных последовательностей включения и отключения съемных блоков торможения, с привязкой к режимам движения поезда и параметрам пути по маршруту.
| US 6275165 B1, 14.08.2001 | |||
| WO 2008079534 A2, 03.07.2008 | |||
| Устройство для образования выводов к станку для намотки якорей электрических машин | 1981 |
|
SU983920A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ МАГИСТРАЛЬЮ ПОЕЗДА | 2006 |
|
RU2311309C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |

