Изобретение относится к устройствам автоматики и телемеханики и может быть использовано для управления движением маневровых локомотивов на станциях.
Известна бортовая аппаратура в системе маневровой автоматической локомотивной сигнализации, включающая бортовой контроллер, предназначенный для реализации всех функциональных возможностей бортовой аппаратуры, блок индикации, блок управления, блок переключателей, датчики импульсов и радиостанцию, принимающую информацию на процессорный модуль бортового контроллера и осуществляющую обмен информацией с радиостанцией, входящей в состав станционного устройства, и радиостанцией, входящей в состав сервисного оборудования, имеющего двухуровневую архитектуру, на верхнем из которых реализуются все функциональные возможности при проведении диагностики бортовой и станционной аппаратуры, а на нижнем располагаются пульт контроля бортовой аппаратуры и пульт контроля станционного устройства (RU №2369509 B61L 27/04, 2007 г.).
Недостатками системы являются недостаточная степень автоматизации управления технологическими процессами на станции и недостаточная информативность для решения оптимизационных задач для маневровых диспетчеров и начальника станции.
Наиболее близким является устройство бортовой аппаратуры автоматической локомотивной сигнализации, содержащее бортовой контроллер и связанные с ним блок датчиков импульсов, локомотивный датчик давления, последовательно соединенные антенну радиоканала и радиомодем, соединенные с бортовым контроллером спутниковую антенну, блок индикации, блок управления, блок переключателей, который соединен с переключателем кабины, рукояткой бдительности машиниста и электропневматическим клапаном, и блок исполнительных цепей, причем бортовой контроллер содержит модуль вычислителя скорости движения, вход которого соединен с блоком датчиков импульсов, модуль измерителя датчиков давления, вход которого соединен с локомотивным датчиком давления, модуль навигационного приемника, вход которого соединен со спутниковой антенной, а выход - с первым портом микрокомпьютера, второй порт которого соединен с радиомодемом, третий порт соединен с первым входом блока индикации, второй вход которого соединен с первым выходом модуля контроля и управления, первый вход которого соединен с выходом блока управления, а второй выход - через модуль контроля и формирователь безопасного напряжения соединен с первым входом блока переключателей, выход которого соединен со вторым входом модуля контроля и управления, первый порт которого через первую шину внешнего интерфейса CAN соединен с блоком исполнительных цепей, предназначенным для подключения к исполнительным цепям локомотива, мост CAN своим первым портом через вторую шину внешнего интерфейса CAN соединен с внешними устройствами, а вторым портом соединен через внутреннюю общую шину интерфейса CAN с модулем контроля и управления, с микрокомпьютером, модулем измерителя датчиков давления и модулем вычислителя скорости движения, в бортовой контроллер которого введен модуль корректирования координаты, обеспечивающий плавный переход между алгоритмами работы модуля навигационного приемника, микрокомпьютера и модуля вычислителя скорости движения, порт модуля корректирования координаты соединен с внутренней общей шиной интерфейса CAN, a вход соединен с выходом блока датчиков импульсов (RU 2411153, B61L 25/04, 2009).
Недостатками известного устройства являются низкая надежность и эффективность работы устройства бортовой аппаратуры, а также отсутствие решений по реализации маршрутов на станции из-за неточного позиционирования локомотива.
Технический результат заключается в повышении надежности, безопасности и эффективности работы устройства бортовой аппаратуры маневровой автоматической локомотивной сигнализации (МАЛС) за счет повышения точности определения координаты подвижной единицы на цифровой модели путевого развития станции и наличия резервного радиоканала с увеличенным трафиком, а также дублирования навигационных методов инерциальной системой с независимыми датчиками, в том числе в условиях ограниченной видимости небесной сферы, исключения случаев снижения скорости или принудительной остановки маневрового локомотива бортовыми устройствами МАЛС из-за невнимательности или ограниченной видимости машинистом визуальной информации системы, приводящих к нарушениям скоростного режима, например, при движении вагонами вперед путем дублирования ее речевыми сообщениями, передачи в станционные устройства системе диагностической информации о работоспособности бортовых устройств и машиниста.
Технический результат достигается тем, что устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации содержит контроллер управления, модуль индикации, модуль управления, модуль навигационных сигналов, радиомодем УКВ-диапазона, модуль инерциальной системы позиционирования, радиомодем стандарта GSM, звуковую плату с динамиком, при этом контроллер управления через шину интерфейса CAN соединен с блоком сопряжения, соответствующие входы которого подключены к выходам датчиков скорости локомотива, датчиков давления, рукоятки бдительности машиниста и системы принудительной остановки локомотива по команде составителя, выходы - к элементам управления приставки электропневматической, вспомогательного тормоза и электропневматического клапана экстренного торможения, другой вход/выход блока сопряжения подключен к выходу/входу силовой установки локомотива, кроме того, контроллер управления соединен через независимые порты с модулем управления, модулем навигационных сигналов и с радиомодемом УКВ-диапазона, через порт LVDS - с модулем индикации, через порт SPI - с модулем инерциальной системы позиционирования, через порт USB - со звуковой платой, а через порт RS-232 - с другим портом радиомодема УКВ-диапазона.
Сущность изобретения поясняется чертежом, на котором изображена структурная схема устройства интеллектуальной бортовой аппаратуры локомотивной сигнализации.
Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации содержит контроллер 1 управления, модуль 2 индикации, модуль 3 управления, модуль 4 навигационных сигналов, радиомодем 5 УКВ-диапазона, модуль 6 инерциальной системы позиционирования, радиомодем 7 стандарта GSM, звуковую плату 8 с динамиком 9. При этом контроллер управления 1 через шину интерфейса CAN соединен с блоком 10 сопряжения, соответствующие входы которого подключены к выходам датчиков 11 скорости локомотива, датчиков 12 давления в тормозной системе локомотива, рукоятки 13 бдительности машиниста и системы 14 принудительной остановки локомотива по команде составителя. Выходы блока 10 сопряжения подключены к элементам управления электропневматической приставки 15, вспомогательного тормоза 16 и электропневматического клапана 17 экстренного торможения. Другой вход/выход блока 10 сопряжения подключен к выходу/входу силовой установки 18 локомотива. Кроме того, контроллер 1 управления соединен через независимые порты с модулем 3 управления, модулем 4 навигационных сигналов и с радиомодемом 5 УКВ-диапазона, через порт LVDS - с модулем 2 индикации, через порт SPI - с модулем 6 инерциальной системы позиционирования, через порт USB - со звуковой платой 8, а через порт RS-232 - с другим портом радиомодема 5 УКВ-диапазона.
Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации работает следующим образом.
Периодически (раз в секунду) от станционных устройств системы маневровой автоматической локомотивной сигнализации по каналам радиомодема 5 УКВ-диапазона поступает команда на управление локомотивом. Команда на управление локомотивом включает описание маршрута и скорости движения локомотива, дифференциальные поправки для решения навигационной задачи и команды экстренной остановки. Радиомодем 5 УКВ-диапазона передает информацию в контроллер 1 управления, который формирует сообщения для машиниста и направляет их в модуль 2 индикации. Кроме того, контроллер 1 управления формирует команды управления локомотивом и по шине CAN передает их в блок 10 сопряжения, который преобразует их в индивидуальные команды управления тягой и тормозными устройствами локомотива.
Существенная информация об изменении скорости, сбоях в работе, начале торможения дублируется речевой командой, формируемой звуковой картой 8 с динамиком 9 по команде контроллера 1 управления.
При этом на входы блока 10 сопряжения поступает контрольная информация с выхода рукоятки 13 бдительности РБ машиниста, датчиков 11 скорости, датчиков 12 давления, силовой установки 18. Таким образом, на вход блока 10 сопряжения поступает информация о скорости и направлении движения локомотива, о давлении в тормозной магистрали локомотива, в тормозном цилиндре и уравнительном цилиндре, о позиции тяги дизеля локомотива. Полученную информацию блок 10 сопряжения преобразовывает в цифровую форму и передает в контроллер 1 управления.
Кроме того, контроллер 1 направляет в модуль 4 навигационных сигналов в режиме реального времени значения дифференциальной поправки, полученные от станционных устройств. Результаты решения навигационной задачи модуль 4 передает в дифференциальном режиме в контроллер 1 управления.
Контроллер 1 управления, в свою очередь, формирует и передает в модуль 2 индикации параметры движения и текущего состояния устройств локомотива для визуального отображения. При этом контроллер 1 управления формирует ответную телеграмму и направляет ее в радиомодем УКВ-диапазона для передачи станционному устройству МАЛС. Передаваемая информация включает данные о скорости, направлении и местоположении локомотива. Эта информация транслируется в каждом цикле обмена.
Кроме того, наиболее полную диагностическую, а при необходимости и контрольную информацию, а также значения дифференциальной поправки передают станционному устройству по команде контроллера 1 по каналам с увеличенным объемом трафика - по каналам радиомодема 7 стандарта GSM.
При невозможности позиционировать локомотив на маршруте из-за недостаточности навигационных данных при движении, например в тоннелях или под мостами, текущую координату локомотива определяют с помощью модуля 6 инерциальной системы позиционирования, включающей независимые датчики - гироскопы и анемометры.
С помощью клавиатуры модуля 4 управления возможна реализация как ручного, так и автоматического управления локомотивом.
При ручном управлении локомотивом машинист вводит значения скорости в пределах допустимых значений, дает команду на тестирование и настройку отдельных узлов локомотива.
В автоматическом режиме управление скоростью локомотива осуществляется по командам контроллера 1 управления через блок 10 сопряжения.
При необходимости существенного увеличения или уменьшения скорости путем возбуждения или обесточивания соответствующих контакторов локомотива переключаются позиции тяги дизеля силовой установки 18 локомотива.
Незначительные изменения скорости обеспечивают за счет плавного регулированием тока независимой обмотки генератора силовой установки 18 локомотива.
Управление торможением осуществляется также по командам контроллера 1 управления через блок 10 сопряжения независимо от режима управления. Для предотвращения превышения допустимой скорости на маршруте применяется управление клапанами торможения и оттормаживания вспомогательного тормоза 16 локомотива по показаниям датчика давления в тормозном цилиндре.
Для прицельной остановки у закрытого светофора или по команде дежурного по станции применяется параллельная работа клапанов торможения и оттормаживания вспомогательного тормоза 16 и приставки 15, которые управляются по показаниям датчиков давления в тормозной магистрали и уравнительном цилиндре локомотива. Кроме того, обесточивается клапан 17 экстренного торможения. Безопасность составителя обеспечивается передачей в блок 10 сопряжения сигналов запрета или разрешения движения от бортовых устройств системы 14 принудительной остановки локомотива по команде составителя.
Контроллер 1 управления при получении сигнала запрета движения через блок 10 сопряжения формирует команду остановки локомотива и передает ее через блок 10 сопряжения на вход силовой установки 18 локомотива и тормозного оборудования 15, 16 и 17.
Таким образом, в устройстве интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации предусмотрено резервирование каналов связи со станционными устройствами, а следовательно, увеличение трафика информационного обмена. Это позволяет использовать более точные технологии спутникового позиционирования и передавать дополнительную диагностическую информацию. Кроме того, использование модуля инерциальной системы позиционирования позволяет исключить сбои спутникового позиционирования, в том числе при движении под мостами и в тоннелях, речевой информатор снижает отвлечение машиниста от визуального контроля маршрута.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| УСТРОЙСТВО БОРТОВОЙ АППАРАТУРЫ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411153C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| Устройство бортовой аппаратуры автоматической локомотивной сигнализации | 2017 |
|
RU2653667C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ МАНЕВРОВОГО ЛОКОМОТИВА ПРИ ПРОВЕДЕНИИ МАНЕВРОВ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИЙ | 2010 |
|
RU2436698C2 |
| СТАНЦИОННОЕ УСТРОЙСТВО ДЛЯ СИСТЕМЫ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2492090C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2011 |
|
RU2478509C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2519317C1 |
Изобретение относится к автоматике и телемеханике на железнодорожном транспорте. Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации содержит контроллер управления, модуль индикации, модуль управления, модуль навигационных сигналов, радиомодем УКВ-диапазона, модуль инерциальной системы позиционирования, радиомодем стандарта GSM, звуковую плату с динамиком. Контроллер управления соединен через независимые порты с модулем управления, модулем навигационных сигналов и с радиомодемом УКВ-диапазона, через порт LVDS - с модулем индикации, через порт SPI - с модулем инерциальной системы позиционирования, через порт USB - со звуковой платой, а через порт RS-232 - с другим портом радиомодема УКВ-диапазона. Решение направлено на повышение надежности и безопасности работы устройства. 1 ил.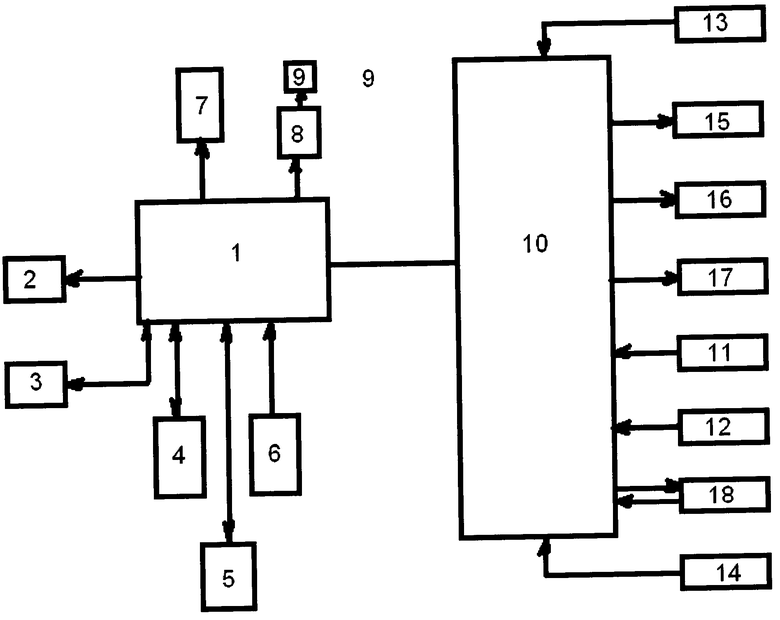
Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации, содержащее контроллер управления, модуль индикации, модуль управления, модуль навигационных сигналов, радиомодем УКВ-диапазона, модуль инерциальной системы позиционирования, радиомодем стандарта GSM, звуковую плату с динамиком, при этом контроллер управления через шину интерфейса CAN соединен с блоком сопряжения, соответствующие входы которого подключены к выходам датчиков скорости локомотива, датчиков давления, рукоятки бдительности машиниста и системы принудительной остановки локомотива по команде составителя, выходы - к элементам управления приставки электропневматической, вспомогательного тормоза и электропневматического клапана экстренного торможения, другой вход/выход блока сопряжения подключен к выходу/входу силовой установки локомотива, кроме того, контроллер управления соединен через независимые порты с модулем управления, модулем навигационных сигналов и с радиомодемом УКВ-диапазона, через порт LVDS - с модулем индикации, через порт SPI - с модулем инерциальной системы позиционирования, через порт USB - со звуковой платой, а через порт RS-232 - с другим портом радиомодема УКВ-диапазона.
| УСТРОЙСТВО БОРТОВОЙ АППАРАТУРЫ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2411153C1 |
| БОРТОВАЯ АППАРАТУРА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2341396C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| KR 100835383 B1, 04.06.2008. | |||

