Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано во время маневровых работ на тупиковых путях станции в качестве дополнительного средства повышения безопасности движения при маневровых работах на тупиковых путях станций, обеспечивающего принудительную остановку при определении системой опасного сближения маневрового локомотива или состава со стационарным препятствием (путевым упором) за счет автоматической передачи на локомотив команды на принудительную остановку по выделенному каналу радиосвязи.
Известна маневровая автоматическая локомотивная сигнализация (МАЛС), принятая в качестве прототипа. Система МАЛС предназначена для обеспечения безопасности проведения маневровых работ на железнодорожных станциях и запрета движения локомотива (состава) со скоростью выше допустимой, а также для автоматической его остановки перед закрытым сигналом или местом проведения работ. Применение этой системы позволяет исключить столкновения вагонов и локомотивов на станциях и предотвратить возникновение аварий из-за ошибок обслуживающего персонала. МАЛС включает в себя станционную и локомотивную аппаратуру.
Основными компонентами локомотивной аппаратуры МАЛС являются: бортовой контроллер, блок переключателей, блок индикации, блок управления, приемопередатчик и антенна.
Бортовой контроллер получает команды от станционной аппаратуры через приемопередатчик. Контроллер опрашивает состояние электрооборудования локомотива через блок переключателей и считывает информацию с датчиков импульсов. Информация для машиниста отображается на экране монитора блока индикации, а команды машинист вводит в бортовой контроллер с помощью функциональной клавиатуры блока управления. Локомотивная аппаратура может работать в трех режимах: ручном, автономном и телеуправления.
В качестве канала передачи информации от стационарных устройств на локомотивные в системе МАЛС используется цифровой радиоканал, работающий в диапазоне 460 МГц. Цифровой радиоканал системы совместно с высокопроизводительным компьютером обеспечивает оперативность управления локомотивами и слежения за их местоположением, недостижимые традиционными средствами.
Прикладное программное обеспечение ПО бортового оборудования МАЛС представляет собой стандартное приложение DOS, работающее в режиме реального времени. ПО осуществляет постоянный мониторинг состояния движения локомотива, клавиатуры, состояния электрооборудования локомотива, данных радиоканала (телеграммы Поста) и выводит на монитор информацию о допустимой скорости движения, ожидаемой скорости движения на следующей изолированной секции, числе свободных впередилежащих блок-участков, расстоянии до первого по ходу изолированного стыка; расстоянии до места проведения работ и до конца маршрутного задания; установленном режиме работы и заданном маршруте и другую информацию. В критических ситуациях программа воздействует на управление силовой установкой локомотива и производит плавное или экстренное его торможение.
Контроль передаваемой информации между станционной и локомотивной аппаратурой осуществляется по протоколу CRC32.
Функциональная безопасность МАЛС основана на двухкомплектном построении аппаратуры как на уровне считывания данных с реле электрической централизации, так и на уровне обработки данных, ввода команд пользователя и вывода оперативных данных, а также управления подвижными объектами по радиоканалу (см. В.И. Зорин, Е.Е. Шухина, П.В. Титов «Микропроцессорные локомотивные системы обеспечения безопасности движения поездов нового поколения», Железные дороги мира №7, 2003 г. с.61).
Недостатком известной системы является отсутствие средств для эффективного исключения столкновения маневрового состава с путевым упором при его осаживании на тупиковые перронные пути станции вагонами вперед вследствие недостаточной точности при измерении расстояния от тупикового упора до головного вагона приближающегося маневрового состава.
Технический результат изобретения заключается в создании системы для предотвращения столкновения подвижного состава или локомотива во время маневровых работ на тупиковых путях станции со стационарным препятствием (путевым упором).
Технический результат достигается тем, что в автоматической системе принудительной остановки маневрового локомотива при проведении маневров на тупиковых путях станций, содержащей размещенные на локомотиве контроллер локомотивный с подключенными к нему пультом локомотивным, радиомодемом, блоком реле, предназначенным для открытия электропневматического клапана принудительного торможения и коммутации электрических цепей управления тягой локомотива, размещенные на центральном пункте контроля устройство управления постовое, соединенное с пультом информационным, с контактами повторителей путевых реле электрической централизации железнодорожной станции, с концентратором данных и радиомодемом, обеспечивающим радиосвязь с локомотивным оборудованием системы, согласно изобретению на тупиковых упорах контролируемых участков пути размещены лазерные дальномеры, для определения расстояния от тупикового упора до приближающегося маневрового состава и введены контроллеры путевые, которые подключены к концентратору данных и соответствующим лазерным дальномерам.
Техническое решение с вышеперечисленной совокупностью признаков позволяет обеспечить предотвращение столкновения подвижного состава или локомотива с тупиковым упором во время маневровых работ на тупиковых путях станции за счет применения лазерного дальномера, обеспечивающего высокую точность определения расстояния от тупикового упора до подвижного состава и скорость его движения и за счет передачи команды на принудительную остановку локомотива при превышении допустимой скорости движения при конкретном расстоянии от головного вагона состава до путевого упора.
Сущность изобретения поясняется чертежами. На фиг.1 и фиг.2 представлены схемы автоматической системы принудительной остановки маневрового локомотива при проведении маневров на тупиковых путях станций.
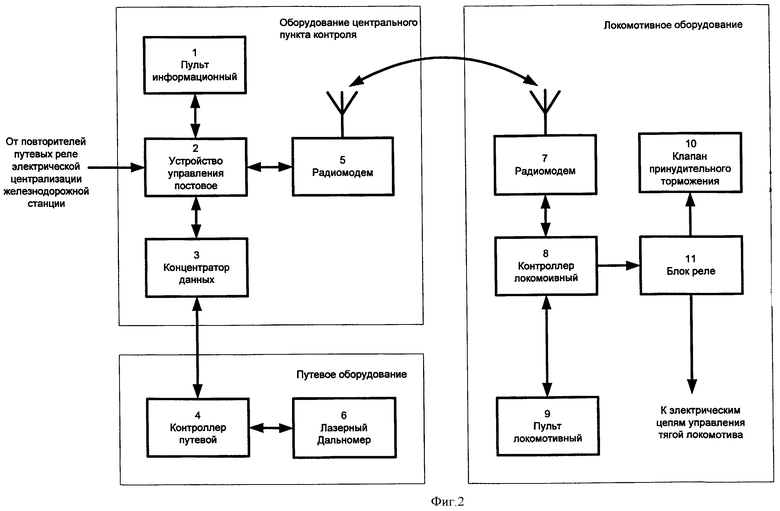
Автоматическая система принудительной остановки маневрового локомотива при проведении маневров на тупиковых путях станций включает устройство управления постовое 2, размещенное на посту электрической централизации железнодорожной станции и соединенное с контактами повторителей путевого реле электрической централизации железнодорожной станции (не показано), с концентратором данных 3, соединенным через контроллеры путевые 4 с лазерными дальномерами 6, а также посредством радиоканала с локомотивным оборудованием маневровых локомотивов. К концентратору данных 3 подключено путевое оборудование, размещенное у путевых упоров на контролируемых тупиковых путях.
На каждом локомотиве размещены контроллер локомотивный 8 с подключенными к нему пультом локомотивным 9, радиомодемом 7, блоком реле 11, соединенным с электрическими цепями управления тягой локомотива и клапаном принудительного торможения 10.
Центральный пункт контроля, расположенный на посту электрической централизации железнодорожной станции, содержит устройство управления постовое 2, соединенное с радиомодемом 5, пультом информационным 1 и контактами повторителей путевых реле электрической централизации железнодорожной станции.
Путевое оборудование, размещенное у путевых упоров контролируемых тупиковых путей, содержит лазерные дальномеры 6, каждый из которых подключен к соответствующему контроллеру путевому 4, соединенному линией связи с концентратором данных 3, который через проводную линию связи соединен с устройством управления постовым 2, установленным на центральном пункте контроля и подключенным к радиомодему 5.
Автоматическая система принудительной остановки маневрового локомотива для маневровых работ на тупиковых путях станций работает следующим образом.
На тупиковом упоре пути устанавливается путевое оборудование, содержащее лазерный дальномер 6, направленный по оси тупикового железнодорожного пути в сторону приближающегося подвижного состава, и контроллер путевой 4.
Концентратор данных 3 предназначен для сбора данных от лазерных дальномеров 6. Лазерных дальномеров 6 в системе может быть до 16 штук. Концентратор данных 3 выделенными проводными линиями связи связан с оборудованием центрального пункта контроля.
Устройство управления постовое 2 является центральным обработчиком информации и обеспечивает обработку данных от лазерных дальномеров 6 всех тупиковых путей, на которых они установлены. Производит определение допустимой скорости движения маневрового состава (локомотива) в зависимости от измеренного расстояния от головы состава до путевого упора и скорости состава, а также осуществляет передачу как данных на локомотив, так и команды на применение принудительного торможения маневрового состава в случае выявления возможного столкновения с тупиковым упором тупикового пути. Выявление возможности столкновения производится на основании расчетов величины тормозного пути S маневрового состава от скорости его движения V (фиг.1).
Локомотивное оборудование служит для организации взаимодействия машиниста локомотива и системы при помощи пульта локомотивного 9. Контроллер локомотивный 8 обеспечивает управление оборудованием, радиомодем 7 служит для организации совместно с радиомодемом 5 центрального пункта контроля радиоканала передачи данных между маневровыми локомотивами и оборудованием центрального пункта контроля. Блок реле 11 производит воздействие на электрические цепи управления тягой локомотива и на клапан принудительного торможения 10 с целью выключения тягового режима локомотива и выполнения принудительного торможении маневрового состава.
При занятии подвижным составом тупикового пути данные от соответствующих повторителей путевых реле электрической централизации железнодорожной станции подаются на устройство управления постовое 2, которое производит включение соответствующего лазерного дальномера 6, установленного на тупиковом упоре тупикового пути. Лазерный дальномер 6 начинает измерять расстояние S до головного вагона (по ходу движения) приближающегося маневрового состава. При этом данные величины расстояния от лазерного дальномера 6 до приближающегося головного вагона постоянно поступают в устройство управления постовое 2 через концентратор данных 3. Получаемые данные используются устройством управления постовым 2 для определения допустимой скорости движения маневрового состава по тупиковому пути на основании расчетной таблицы зависимости длины тормозного пути от скорости и количества вагонов.
Система обеспечивает определение опасного сближения поезда со стационарным препятствием путем сравнения фактической скорости движения Vфакт с допустимой Vдоп в зависимости от расстояния S до препятствия.
Допустимая скорость движения Vдоп определяется с учетом тормозного пути для отдельных локомотивов (в зависимости от типа) и маневровых составов (в зависимости от длины, веса и др.), а также с учетом максимального времени задержки на передачу команды принудительной остановки локомотива от момента ее формирования до момента воздействия на тормозное и тяговое оборудование локомотива.
Если Vфакт≥Vдоп, то система по радиоканалу через радиомодем 5 передает команду принудительного торможения на маневровый локомотив, производящий осаживание вагонов в данный тупиковый путь.
Служебная информация: допустимая скорость движения, фактическая скорость движения состава, расстояние от тупикового упора до головного вагона маневрового состава передаются на локомотив по радиоканалу и выводятся для машиниста локомотива на дисплей пульта локомотивного 9.
Процесс передачи данных от устройства управления постового 2 по радиоканалу на маневровый локомотив заканчивается при поступлении от повторителей путевых реле электрической централизации железнодорожной станции сигнала об освобождении составом соответствующего тупикового пути.
Служебная информация: допустимая скорость движения, фактическая скорость движения состава, расстояние от тупикового упора до головного вагона маневрового состава выводится на пульт информационный 1, размещенный на рабочем месте руководителя маневровой работы на станции (дежурного по станции), что позволяет контролировать перемещение состава на тупиковом пути станции. В случае исполнения команды принудительного торможения включается оптическая и акустическая сигнализация машиниста локомотива и руководителя маневровой работы на железнодорожной станции.
Система определяет ограничение по скорости маневровых передвижений и в случае, если фактическая скорость движения маневрового состава, вычисленная на основании данных полученных от лазерного дальномера 6, превысит установленную скорость движения на данном участке пути, заложенную в память устройства управления постового 2, то машинист локомотива будет информирован о превышении скорости (оптическая и акустическая сигнализация).
Все данные, переданные от лазерных дальномеров 6, действия оператора, руководителя маневровой работы на станции с пультом информационным 1 и действия машиниста маневрового локомотива с пультом локомотивным 9 регистрируются в регистраторах локомотивного оборудования и устройства управления постового.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ У ПУТЕВЫХ УПОРОВ ПРИ ДВИЖЕНИИ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИИ | 2013 |
|
RU2529561C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| СТАНЦИОННОЕ УСТРОЙСТВО МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2011 |
|
RU2478508C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2277054C1 |
| Станционное устройство системы маневровой автоматической локомотивной сигнализации, интегрированной с микропроцессорной централизацией железнодорожной станции | 2022 |
|
RU2780257C1 |
| СИСТЕМА ГОРОЧНОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДИОКАНАЛА (ГАЛС Р) | 2005 |
|
RU2303542C1 |
| УСТРОЙСТВО ИНТЕЛЛЕКТУАЛЬНОЙ БОРТОВОЙ АППАРАТУРЫ МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2487035C1 |
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано во время маневровых работ на тупиковых путях станции. Система содержит размещенные на локомотиве контроллер локомотивный с подключенными к нему пультом локомотивным, радиомодемом, блоком реле, предназначенным для открытия электропневматического клапана принудительного торможения и коммутации электрических цепей управления тягой локомотива. Система также содержит размещенные на центральном пункте контроля устройство управления постовое, соединенное с пультом информационным, с контактами повторителей путевых реле электрической централизации железнодорожной станции, с концентратором данных, радиомодемом, обеспечивающим радиосвязь с локомотивным оборудованием системы. На тупиковых упорах контролируемых участков пути размещены лазерные дальномеры для определения расстояния от тупикового упора до приближающегося маневрового состава. В систему введены контроллеры путевые, которые подключены к концентратору данных и соответствующим лазерным дальномерам. Достигается предотвращение столкновения подвижного состава или локомотива во время маневровых работ на тупиковых путях станции со стационарным препятствием. 2 ил.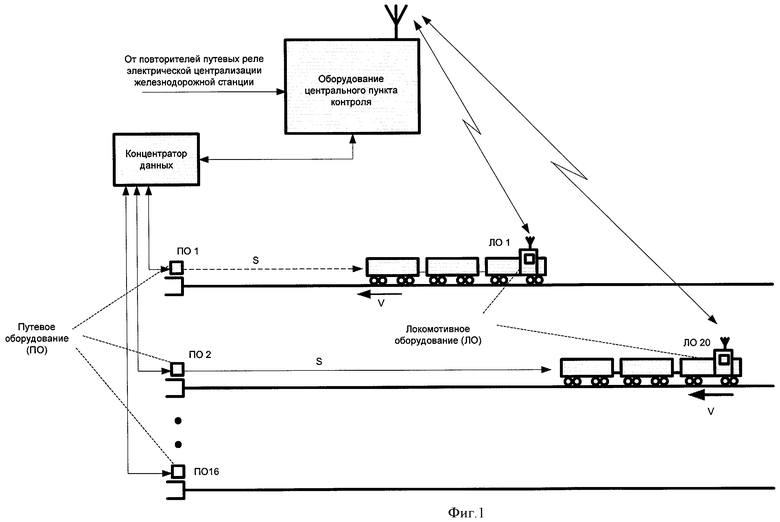
Автоматическая система принудительной остановки маневрового локомотива при проведении маневров на тупиковых путях станций, содержащая размещенные на локомотиве контроллер локомотивный с подключенными к нему пультом локомотивным, радиомодемом, блоком реле, предназначенным для открытия электропневматического клапана принудительного торможения и коммутации электрических цепей управления тягой локомотива, размещенные на центральном пункте контроля устройство управления постовое, соединенное с пультом информационным, с контактами повторителей путевых реле электрической централизации железнодорожной станции, с концентратором данных, радиомодемом, обеспечивающим радиосвязь с локомотивным оборудованием системы, отличающаяся тем, что на тупиковых упорах контролируемых участков пути размещены лазерные дальномеры для определения расстояния от тупикового упора до приближающегося маневрового состава и введены контроллеры путевые, которые подключены к концентратору данных и соответствующим лазерным дальномерам.
| МИКРОПРОЦЕССОРНЫЕ ЛОКОМОТИВНЫЕ СИСТЕМЫ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ НОВОГО ПОКОЛЕНИЯ | |||
| ЗОРИН В.И | |||
| И ДР., ЖЕЛЕЗНОДОРОЖНЫЕ ДОРОГИ МИРА, №7, 2003, с.61 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US | |||

