Изобретение относится к способам и средствам мониторинга сетей сложной топологии и объектов, входящих в их состав, и может быть использовано для индикации, контроля состояния и управления параметрами разветвленных сетей сложной топологии различного назначения.
Современный уровень развития мониторинга сетей сложной топологии, например систем энергообеспечения, трубопроводных систем транспортировки газообразных, жидких продуктов, многокомпонентных сред, транспортных узлов, требует наглядного и одновременного отображения статической, динамической информации и доступных управляющих воздействий с целью создания полной картины о состоянии системы для принятия решений в режиме реального времени.
Известен способ динамической визуализации данных об объекте (RU 2142162 С1, МПК G06T 11/80, 27.03.1999), который включает представление данных об объекте в окне на экране монитора в трехмерном или двумерном подпространстве N-мерного пространства в соответствии с геометрией подпространства и самого объекта, внесение изменения в данные о геометрии объекта и наблюдение в окне на экране монитора этого изменения. На экране монитора формируют по меньшей мере одно дополнительное окно, в которое выводят данные об объекте в другом подпространстве N-мерного пространства, чем представленное в первом окне, а внесением изменения в визуальное представление объекта в первом окне инициируют изменение представления объекта в дополнительном окне. В данном способе информация об объекте отображается в 2D и 3D представлениях на одном экране, но не предусмотрено решение задач управления.
Известна также система индикации хода процессов (RU 2004127836 А, МПК G06F 3/14, G06F 13/00, 20.02.2006), которая содержит соединенные между собой компьютер, устройство отображения и манипулятор. Способ индикации хода процессов, описанный в данной заявке на изобретение, включает запуск программно процесса из рабочей вкладки, отображаемой в диалоговом окне, и отображение хода процесса на устройстве отображения во время его выполнения. Данный способ и система индикации обеспечивают индикацию хода процессов во времени, но не обеспечивают контроль неисправности объектов системы и автоматизированную передачу управляющих воздействий для их устранения.
Наиболее близким к заявляемому способу и системе для его осуществления по технической сущности является способ отображения информации об объектах контролируемого диспетчерского круга и система для его осуществления (RU 2107940 С1, МПК G06F 3/14, Н02В 15/02, 27.03.1998), в котором производится компьютерная обработка информации от контролируемых пунктов и объектов круга с выводом созданных компьютером изображений на устройство отображения. Информация представляется на экранах двух видеотерминалов, причем на первом экране отображают мнемосхему круга с условными изображениями контролируемых пунктов, а на втором экране - подробную схему контролируемого пункта или его участка, выбранного на первом экране. Недостатком данного способа отображения информации и системы для ее осуществления является наличие двух раздельных видеотерминалов, а также отображение на экранах только 2D схематических образов.
Задача, на решение которой направлено данное изобретение, заключается в повышении качества отображения статической и динамической информации об управляемой сети, с одновременным обнаружением неисправностей объектов сети, подачей доступных управляющих воздействий и наблюдением за их отработкой.
Технический результат, достигаемый при осуществлении данного изобретения, заключается в повышении надежности и достоверности представления данных о топологии сети и входящих в ее состав объектов управления, с одновременным формированием сигналов аварийно-предупредительной сигнализации, подачей управляющих воздействий и контролем за устранением неисправностей.
Поставленная задача с достижением упомянутого выше технического результата решается тем, что в способе визуализации и управления в сети сложной топологии, который заключается в том, что с помощью консоли управления отображают на устройстве отображения и контролируют ход процесса в сети, визуализационно упрощают топологию сети и входящие в ее состав объекты для их единообразного 3D представления с разного удаления и/или ракурса наблюдения с привязкой объектов к их фактическому положению в сети, которые запоминают в блоке баз данных, формируют два противоположных по направлению потока данных, связанных обратной связью: информационный - от индикаторов объектов управления к устройству отображения и управляющий - от устройства отображения к органам управления, производят инициализацию начального состояния консоли управления путем опроса баз данных и создают резервную копию данных, проводят проверку правильности подключения консоли управления к индикаторам и органам управления объектов управления, после успешной проверки отображают топологию сети и входящие в ее состав объекты в виде 3D представлений на N уровнях в зависимости от расстояния до точки наблюдения, и/или ракурса наблюдения и/или вида объекта и/или принципа их работы, и/или неисправности и/или движущейся среды, одновременно считывают текущие показания индикаторов, сравнивают их с уставками и формируют сигналы аварийно-предупредительной сигнализации (АПС), которые визуализируют на устройстве отображения, производят навигацию по топологии сети и объектам, при появлении значимого сигнала АПС подают управляющее воздействие на орган управления объекта управления, контролируют ход процесса отработки управляющего воздействия по показаниям индикаторов объекта управления и записывают ход процесса.
Технический результат достигается также тем, что:
в блок баз данных записывают базу данных топологии сети и входящих в ее состав объектов, базу данных 3D представления различных видов топологии сети, базу данных объектов с принципом их работы и неисправностями, базу данных 3D представления различных видов объектов, базу данных индикаторов, базу данных 3D представления различных видов индикаторов, базу данных сред, базу данных 3D представления различных видов сред, базу данных управляющих воздействий и базу данных уставок, при этом различные уровни представления зависят от расстояния до точки наблюдения, ракурса наблюдения, вида объекта, принципа его работы, неисправности, движущейся среды;
проверку правильности подключения консоли управления к объектам управления проводят путем сравнения данных об индикаторах и органах управления объектов управления, описанных в базе данных, с результатами реального опроса индикаторов и органов управления доступных объектов управления, при их совпадении сравнивают показания индикаторов объектов управления с заданными уставками и определяют возможность подключения консоли управления к объектам управления вне зоны аварийной работы объектов управления;
каждую следующую резервную копия данных создают через установленный интервал времени, при подаче управляющего воздействии или существенном изменении параметров сети;
при представлении сети на первом уровне, который соответствует наибольшему расстоянию до точки наблюдения, отображают всю сеть в целом, объекты управления в текущем состоянии и/или принцип их работы и/или детализацию индикаторов и органов управления простых объектов управления, сигналы АПС и доступные управляющие воздействия;
логически связанные в базе данных объекты сети выделяют из общей топологии сети в выбранный логически обусловленный фрагмент топологии сети на основе взаимных связей и отображают в ярко выделенном и/или полупрозрачном виде на изображении и/или в отдельном окне;
на более близких расстояниях от точки наблюдения, которые соответствуют последующим уровням представления, отображают детализацию индикаторов и органов управления простых объектов управления и/или принцип их работы, детализацию вложенных изолированных и/или замкнутых систем управления сложными объектами управления и/или принцип их работы, сигналы АПС и доступные управляющие воздействия;
детализацию объектов, информационных и управляющих воздействий, соответствующих текущему уровню представления, отображают на изображении, соответствующем данному уровню и/или в полупрозрачном виде на изображении, соответствующем предыдущему уровню представления сети и/или в отдельном окне;
объекты, входящие в топологию сети, выполняют в виде 3D представления целиком и/или с сегментным разрезом, через который наглядно демонстрируют принцип его работы, движение сред и/или перемещающего содержимого внутри объекта, цветовую индикацию состояния поверхностей в зависимости от протекающих сред и/или перемещающегося содержимого, рабочие состояния и неисправности объекта;
движение сред и/или перемещение содержимого внутри объектов отображают в полупрозрачном виде на общей топологии сети в виде анимированной вставки, состав и раскраска которой зависит от режима, состава и направления движущихся сред и/или перемещающего содержимого;
перемещение по сети осуществляют с помощью отображаемого в полупрозрачном виде навигатора, который эргономически связан с рукой оператора и содержит панель управления и окно навигатора, при этом панель управления выполнена с возможностью постраничного представления: органов управления в виде экранных форм и/или органов управления, реализованных в виде внешних устройств и пультов управления, справочной информации, прочностных характеристики и уставок АПС, а окно навигатора выполнено с возможностью отображения размера полного изображения сети, а также размера и положения просматриваемого в данный момент фрагмента сети.
Технический результат в устройстве достигается тем, что в системе для визуализации и управления в сети сложной топологии, содержащей устройство отображения, к входу которого подключена консоль управления, второй вход/выход которой связан с входами/выходами объектов управления сети, каждый из которых содержит индикаторы и органы управления, причем выходы индикаторов и входы органов управления соединены с входом/выходом соответствующего объекта управления, консоль управления содержит блок баз данных и синхронизации, блок формирования изображения, блок управления, блок записи резервных копий данных, блок записи хода процесса, последовательно соединенные блок приема показаний индикаторов, блок формирования сигналов АПС и блок хранения данных индикаторов, последовательно соединенные блок хранения управляющих воздействий, блок формирования управляющих воздействий и блок отправки управляющих воздействий, при этом выход блока хранения данных индикаторов соединен с первым входом блока записи резервных копий данных и с первым входом блока формирования изображения, вход/выход блока управления связан с первыми входами/выходами блока баз данных и синхронизации и блока хранения управляющих воздействий и с вторыми входами/выходами блока формирования изображения и блока записи резервных копий данных, вход/выход блока баз данных и синхронизации связан с третьим входом/выходом блока формирования изображения, с вторыми входами блока хранения данных индикаторов, блока хранения управляющих воздействий, блока формирования сигналов АПС и блока формирования управляющих воздействий, а выходы блока приема показаний индикаторов, блока формирования сигналов АПС, блока формирования управляющих воздействий и блока отправки управляющих воздействий соединены с входной шиной блока записи хода процесса.
Технический результат в устройстве достигается также тем, что:
блок баз данных и синхронизации содержит базы данных и блоки синхронизации, связанные двухсторонними связями с шиной данных обмена, к которой подключен первый вход блока и которая является вторым входом/выходом блока, при этом базы данных включают: базу данных топологии сети и входящих в ее состав объектов, базу данных 3D представления различных видов топологии сети, базу данных объектов с принципом их работы и неисправностями, базу данных 3D представления различных видов объектов, базу данных индикаторов, базу данных 3D представления различных видов индикаторов, базу данных сред, базу данных 3D представления различных видов сред, базу данных управляющих воздействий и базу данных уставок, а блоки синхронизации включают блок синхронизации команд управления, блок синхронизации передачи данных по топологии сети, блок синхронизации передачи данных по объектам сети, блок синхронизации данных АПС и блок синхронизации данных хранения;
блок формирования изображения содержит блоки построения изображения от 1-го до N-го уровня, блок формирования изображения навигатора, блок моделирования столкновений и оценки расстояния и блоки формирования представления, которые включают: блок формирования представления о средах, блок формирования представления о данных АПС, блок формирования представления о логически выделенных фрагментах сети, блок формирования представления об индикаторах, блок формирования представления об органах управления, блок формирования представления о видимых объектах и их разрезах, при этом первые входы/выходы блока моделирования и блоков формирования представления соединены с первой шиной связи, к которой подключены также первый, второй и третий входы блока формирования изображения, вторые входы/выходы блока моделирования столкновений и оценки расстояния, блоков формирования представления, первые входы/выходы блоков построения изображения от 1-го до N-го уровня и первый вход/выход блока формирования изображения навигатора связаны с второй шиной связи, а выходы блоков построения изображения от 1-го до N-го уровня и выход блока формирования изображения навигатора связаны с выходной шиной блока.
Надежность и достоверность представления исходной информации об управляемой сети сложной топологии обеспечивается за счет увеличения детализации отображаемой графической и текстовой информации о топологии и объектах сети, об индикаторах и органах управления объектов управления сетью и многоуровневой, наглядной организацией выдачи данных на устройство отображения.
Решение задачи управления сетью одновременно с визуализацией обеспечивается за счет формирования двух противоположных по направлению потоков данных, связанных обратной связью: информационного - от индикаторов объектов управления к устройству отображения и управляющий - от устройства отображения к органам управления.
Изображение иллюстрируется чертежами, на которых представлено:
на фиг.1 - структурная электрическая схема заявляемой системы;
на фиг.2 - структурная электрическая схема блока баз данных и синхронизации;
на фиг.3 - структурная электрическая схема блока формирования изображения;
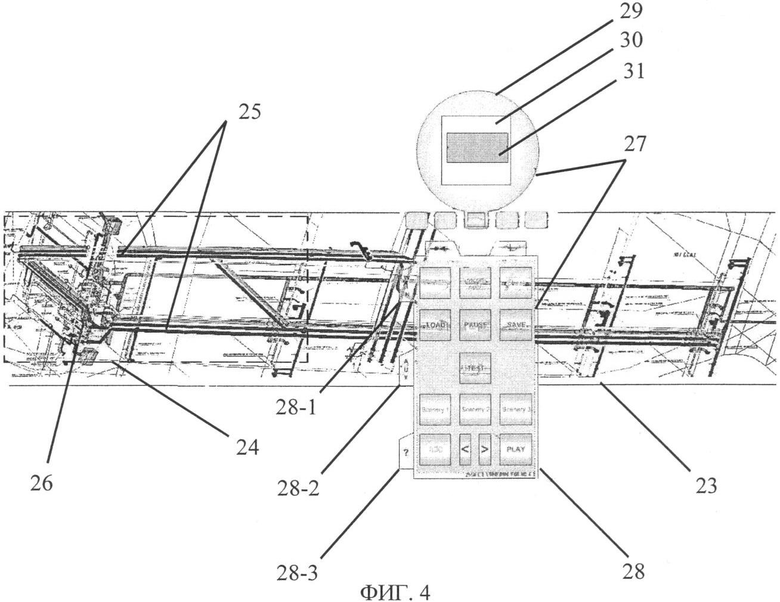
на фиг.4 - экранная форма участка сети на большом расстоянии от точки наблюдения;
на фиг.5 - экранная форма укрупненного фрагмента сети;
на фиг.6 - изображение объекта с сигналом АПС;
на фиг.7 - увеличенное изображение объекта с сигналом АПС;
на фиг.8 - изображение аварийного объекта;
на фиг.9 - изображение элементов сети с разрезами;
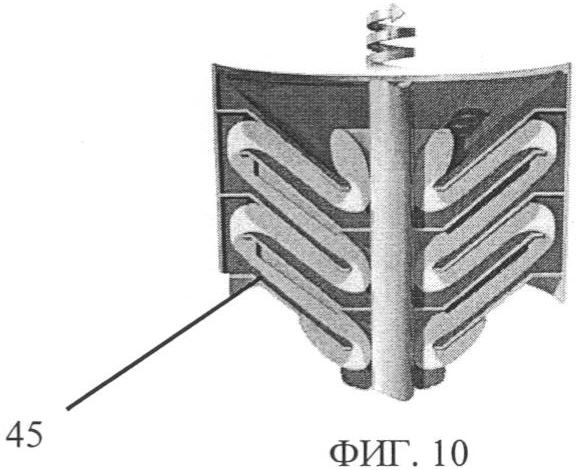
на фиг.10 - фрагмент объекта с демонстрацией принципа работы;
на фиг.11 - фрагмент объекта с демонстрацией состояния его внутренних поверхностей.
На фиг.1-3 обозначены:
1 - консоль управления; 2 - устройство отображения; 3 - объекты управления; 4 - блок баз данных и синхронизации; 5 - блок формирования изображения; 6 - блок управления; 7 - блок хранения данных индикаторов; 8 - блок хранения управляющих воздействий; 9 - блок записи резервных копий данных; 10 - блок формирования сигналов АПС; 11 - блок формирования управляющих воздействий; 12 - блок записи хода процесса; 13 - блок приема показаний индикаторов; 14 - блок отправки управляющих воздействий; 15 - индикаторы; 16 - органы управления; 17 - базы данных; 18 - блоки синхронизации; 19 - блоки построения изображения от 1-го до N-го уровня; 20 - блок построения изображения навигатора; 21 - блок моделирования столкновений и оценки расстояния; 22 - блоки формирования представления.
На фиг.4-11 обозначены:
23 - участок сети; 24 - фрагмент сети; 25 - трубопроводы; 26 - объекты сети; 27 - навигатор; 28 - панель управления навигатора; 29 - окно навигатора; 30 - полное изображение сети; 31 - положение и размер просматриваемого участка сети; 32 - положение и размер просматриваемого фрагмента сети; 33 - логически связанные в базе данных объекты сети; 34 - сложный объект; 35 - замкнутая система сложного объекта; 36 - простой объект; 37 - фрагмент сети, включающий объект с сигналом АПС; 38 - аварийный объект; 39 - сигнал АПС; 40 - увеличенное изображение объекта с сигналом АПС; 41 - фрагмент сети, включающий элемент сети с отображением внутренней структуры объектов; 42 - значение сигнала АПС; 43 - датчик сигнализации в объекте; 44 - фрагмент объекта, требующий уточнения принципа работы; 45 - фрагмент объекта с демонстрацией принципа работы и внутренних течений; 46 - фрагмент объекта с демонстрацией состояния внутренних поверхностей в процессе его работы.
Система для визуализации и управления в сети сложной топологии содержит (см. фиг.1) консоль 1 управления, выход которой соединен с устройством 2 отображения, а второй вход/выход связан с объектами 3 управления.
Объекты 3 управления содержат индикаторы 15, которые включают датчики, отражающие параметры работы объектов и текущее положение органов 16 управления, например сервомоторов, приводов клапанов.
Для обеспечения работы консоли 1 управления блок 4 (см. фиг.2) содержит следующие базы данных 17:
базу данных топологии сети и входящих в ее состав объектов с привязкой к их фактическому расположению, которая содержит информацию о графе связей полной топологии всей сети вместе с привязкой к ней простых и сложных объектов, индикаторов и органов их управления, а также о назначении и логике взаимосвязи ее фрагментов;
базу данных 3D представления различных видов топологии сети, которая содержит информацию о N различных уровнях (видах) представлении топологии при различном удалении и ракурсах наблюдения топологии и простых объектов;
базу данных объектов с принципом их работы и неисправностями, которая содержит информацию о простых и сложных объектах, их месте в топологии, параметрах работы и неисправностях;
базу данных 3D представления различных видов объектов, которая содержит информацию о различном представлении объектов их неисправностях, при различном удалении, ракурсах наблюдения, значимости неисправностей;
базу данных индикаторов, которая содержит информацию об индикаторах, их месте в топологии, параметрах их поведения, единицах и точности измерения, неисправностях,
базу данных 3D представления различных видов индикаторов, которая содержит информацию о различном представлении индикаторов в зависимости от удаленности, ракурса зрения, значимости выводимой величины или сигнализации неисправности,
базу данных сред, которая содержит информацию о движущихся средах и\или протекающего содержимого по топологии и в объектах;
базу данных 3D представления различных видов сред, которая содержит информацию о движущихся средах и\или протекающего содержимого по топологии и в объектах;
базу данных управляющих воздействий, которая содержит информацию о всех органах управления, подтверждения сигнализации (квитирования), их привязке к топологии, объектам и индикаторам;
базу данных уставок (границ и диапазона возможного изменения параметров) индикаторов и управляющих воздействий.
Различные уровни представления зависят от расстояния до точки наблюдения, ракурса наблюдения, вида объекта, принципа его работы, неисправности, движущейся среды.
Блоки 18 синхронизации блока 4 обеспечивают синхронизацию команд управления и передачу данных от баз данных 17 к блокам 5, 7, 8, 10 и 11.
Блок 5 формирования изображения (см. фиг.3) обеспечивает подготовку данных для их визуализации на устройстве 2 отображения, в качестве которого могут быть использованы компьютерные дисплеи/проекторы или голографические дисплеи/3D проекторы.
Блок 6 управления включает органы управления, ассоциированные с рукой оператора, которые включают возможность перемещения по топологии (включая zoom-in, zoom-out) и возможность подачи команд управления на объекты системы.
Входящий в блок 5 формирования изображения блок 21 моделирования и оценки расстояний (см. фиг.3) вычисляет текущие координаты точки наблюдения и оценивает возможность контакта точки наблюдения с видимыми объектами и, в зависимости от этого, производит выбор и загрузку необходимых элементов упрощенной топологии, 3D-представления объектов, их пространственных координат и компоновку объектов в зависимости от удаленности объектов и их значимости.
Блок 13 обеспечивает прием показаний индикаторов 15, которые передаются в блок 10. Данные в блок 14 отправки управляющих воздействий передаются из блока 11, в котором производится сравнение полученного управляющего воздействия со списком доступных управляющих воздействий, полученным по запросу из блока 4 баз данных. Результаты сравнения, произведенного в блоках 10 и 11, передаются в блок 12 для записи с целью сохранения данных о недопустимых операциях.
Блок 7 обеспечивает хранения данных обо всех индикаторах, органах управления, сигналах АПС, неисправностях и ошибках отработки, а блок 8 - хранения данных всех управляющих воздействий. Данные блоков 7 и 8 передаются к блоку 9, где производится запись резервных копий всех данных с целью повышения живучести системы.
Описание способа совместим с описанием работы системы для ее осуществления.
Система для управления и визуализации сети сложной топологии работает следующим образом. После включения системы производится инициализация начального состояния консоли 1 управления путем опроса баз данных 17 блока 4. После завершения заполнения данных в блоках 7 и 8 и создания в блоке 9 резервной копии опрашивают объекты управления на предмет предоставления информации о текущем состоянии индикаторов и органов управления.
Полученная информация анализируется в блоке 10 методом сравнения с данными об индикаторах и органах управления, содержащихся в базе данных объектов и базе данных индикаторов блока 4 баз данных. Производится проверка правильности подключения выбранной консоли управления к управляемым объектам и индикаторам.
Если проверка в блоке 10 прошла успешно, то производится сравнение текущих значений параметров индикаторов с уставками, содержащимися в базе данных уставок блока 4 баз данных. Производится проверка возможности подключения консоли управления вне зоны аварийной работы объектов управления.
Если проверка в блоке 10 прошла успешно, то информация поступает к блоку 7 хранения данных индикаторов, где производится заполнение предопределенных полей, и передача данных в блок 5 формирования изображений и в блок 9 для записи резервных копий данных индикаторов. Каждую следующую резервную копию данных создают через установленный интервал времени, при подаче управляющего воздействии или существенном изменении параметров сети.
В блоке 5 активизируется блок 21 моделирования и оценки расстояний и блоки 22 для формирования свойственных блокам представлений. Блок формирования представления о средах формирует различные представления о движущихся средах и/или протекающего содержимого по сети в зависимости от удаления и ракурса наблюдения. Блок формирования представления о данных АПС формирует различные представления об отклонении от уставок, о неисправностях, сигналах АПС в зависимости от значимости события, расстояния и ракурса наблюдения сети. Блок формирования представления о логически выделенных фрагментах сети формирует различные представления о логически выделенных фрагментах сети на основе запроса к базам данных блока 4 при наведении навигатора на фрагмент сети.
На основе сформированных представлений блок 19 построения изображения первого уровня формирует изображение сети на наибольшем расстоянии от точки наблюдения, которое подается на устройство 2 отображения совместно с изображением навигатора, формируемым в блоке 20.
После появления изображения на устройстве отображения 2 оператором активизируется блок управления 6. Перемещение по сети осуществляют с помощью отображаемого в полупрозрачном виде навигатора 27, который эргономически связан с рукой оператора и содержит панель управления 28 и окно навигатора 29.
Изображение сети на первом уровне позволяет оператору с помощью навигатора 27 обозревать всю сеть в целом, текущее состояние индикаторов и органов управления с демонстрацией принципа их работы, доступных управляющих возможностей и текущих неисправностей, представления о которых инициализируются на основе запроса к базам данных.
На более близких расстояниях от точки наблюдения, которые соответствуют последующим уровням представления, оператор просматривает детализацию индикаторов и органов управления простых объектов 36 управления и/или принцип их работы, детализацию вложенных изолированных и/или замкнутых систем управления 35 сложными объектами управления 34 и/или принцип их работы, сигналы АПС и доступные управляющие воздействия.
Для повышения наглядности наблюдения детализацию объектов, информационных и управляющих воздействий, соответствующих текущему уровню представления, отображают на изображении, соответствующем данному уровню и/или в полупрозрачном виде на изображении, соответствующем предыдущему уровню и/или в отдельном окне в зависимости от типа объекта. Объекты, входящие в топологию сети, выполняют в виде 3D представления целиком и/или с сегментным разрезом, через который наглядно демонстрируют принципы его работы, движение сред и/или перемещающего содержимого внутри объекта, цветовую индикацию состояния поверхностей в зависимости от протекающих сред и/или перемещающегося содержимого, рабочие состояния и неисправности объекта.
Логически связанные в базе данных объекты сети выделяются по принципу их логической связности их общей топологии и выделяются цветом, полупрозрачностью или более яркой подсветкой на изображении и/или в отдельном окне в зависимости от типа объекта или решения оператора.
Движение сред и/или перемещение содержимого внутри объектов отображают в полупрозрачном виде на общей топологии сети или в виде анимированной вставки, состав и раскраска которой зависит от режима, состава и направления движущихся сред и/или перемещающегося содержимого.
Одновременно с отображением топологии сети текущие показания индикаторов 15 через блок 13 приема показаний индикаторов поступают в блок 10 АПС, где по результатам сравнения с уставками формируются сигналы АПС, которые записывают в блок 7 для отображения информации на устройстве отображения 2 и в блок 12 для записи сообщений о срабатывании АПС. При появлении значимого сигнала АПС оператор с помощью блока 6 подает управляющее воздействие, которое после проверки в блоке 11 на доступность воздействия через блок 14 отправки управляющих воздействий поступает на соответствующий орган 16 управления объекта управления 3. Оператор контролирует ход процесса отработки управляющего воздействия на устройстве отображения 2 по показаниям индикаторов 15 объекта управления. С целью архивации хода процесса в блок 12 записывают данные индикаторов, сигналы АПС, данные проверки управляющих воздействий и воздействия, поданные на отработку.
Консоль 1 управления может быть реализована в виде распределенного сетевого приложения на базе локальной сети (сетевой класс) или глобальной (Интернет), организованного в виде физической топологии "общая шина" и логической топологии "кольцо". В результате заявленной структуры консоли 1 управления ее блоки могут физически располагаться на разных компьютерах, осуществляя по сети обмен данными между блоками.
Проиллюстрируем возможности визуализации в заявляемом изобретении на примере гидравлической сети сложной топологии для транспортировки различных сред, например газов, масел, жидкостей, взвесей. На фиг.4 приведена экранная форма устройства 2 отображения, на которой изображен участок 23 сети на большом расстоянии от точки наблюдения. Гидравлическая сеть содержит систему трубопроводов 25 и многочисленные объекты 26, которые трудно различимы с большого расстояния.
На изображение сети в полупрозрачном виде наложен навигатор 27, который содержит панель управления 28 и окно 29 навигатора. Панель управления 28 содержит указатели страниц, некоторые из которых: органов управления, справочной информации и уставок АПС, обозначены на фиг.4 как 28-1, 28-2 и 28-3. При активации страницы на пульт управления выводится ее содержание. На фиг.4 активирована страница с органами управления навигатором. В окне 29 навигатора отображается прямоугольник 30, соответствующий размеру и положению наблюдаемого участка 23 сети на фоне полного изображения 30 сети.
Для более детального наблюдения выбран участок 24 сети, который выделен на фиг.4 пунктирной линией и представлен на последующем уровне отображения в увеличенном виде на фиг.5. В окне 29 на фоне полного изображения 30 сети теперь отображается прямоугольник 32, размер и положение которого соответствует участку 24 сети. С данного расстояния можно наблюдать простой объект 36, сложный объект 34 на фоне топологии сети, логически связанный со сложным объектом 34 участок трубопровода 33, который выделен более яркой подсветкой, объект 37 со сработавшей сигнализацией. Сложный объект 34 вынесен также в увеличенном виде в отдельное окно с отображением элементов замкнутой системы сложного объекта.
На фиг.6 показан пример представления на переднем плане сработавшей индикации АПС по уровню (Level) жидкости в удаленном аварийном объекте 38 - накопительной цистерне, при приближении к которой (см. фиг.7) показывается, в какой части цистерны сработала сигнализация и текущее значение уровня жидкости. Изображение аварийной цистерны 38 (см. фиг.8) становится доступным при дальнейшем приближении к ней, и на нем показывается точное местоположение сработавшего датчика 43 уровня и флажок 42 с текущим значением отображаемой величины (1.4 м).
На фиг.7 пунктиром выделен фрагмент элементов 41 сети - сепарационные колонны, поясняющий их внутреннее устройство. При приближении к ним в разрезе становится видна внутренняя структура колонн 41, состоящая из отбойных тарелок (см. фиг.9), на которой пунктиром выделен фрагмент 44 колонны, поясняющий принцип их работы с помощью анимации работающих частей. При дальнейшем приближении можно оценить работу отдельных групп тарелок. На фиг.10 показан фрагмент колонны с демонстрацией внутренних течений сред в колонне, а на фиг.10 - фрагмент колонны с демонстрацией состояния внутренних поверхностей лопаток колонны в процессе их работы.
По сравнению с системами, отображающими данные о сети без вложенности, предлагаемый способ визуализации и управления в сети сложной топологии и система для его осуществления обеспечивают, при сохранении целостности 3D представления об объектах управления и всей топологии в целом, на одном экране на различных уровнях представления формировать сигналы аварийно-предупредительной сигнализации, подавать управляющие воздействия и контролировать устранение неисправности объектов управления, что повышает надежность и достоверности представления данных о топологии сети и входящих в ее состав объектов с одновременным решением задачи управления в сети.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ИЗОБРАЖЕНИЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ ДЛЯ СИСТЕМ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2467395C1 |
| ТРЕНАЖЕР ГРУЗОБАЛЛАСТНЫХ И ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЙ НА ТАНКЕРАХ И БЕРЕГОВЫХ ТЕРМИНАЛАХ | 2004 |
|
RU2273889C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ОПЕРАТОРОВ КАРЬЕРНЫХ ЭКСКАВАТОРОВ | 2022 |
|
RU2799040C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| СИСТЕМА ПРОЕКТИРОВАНИЯ ОБЪЕКТОВ В СРЕДЕ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ В РЕАЛЬНОМ ВРЕМЕНИ | 2017 |
|
RU2656584C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕЙ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ ПО ПРИЗНАКАМ "СЛЕДА В АТМОСФЕРЕ" ЛЕТЯЩЕГО В СТРАТОСФЕРЕ С ГИПЕРЗВУКОВОЙ СКОРОСТЬЮ "РАДИОНЕЗАМЕТНОГО" ОБЪЕКТА | 2017 |
|
RU2689783C2 |
| УСТРОЙСТВО СИНТЕЗА КАРТОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2250182C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО МОНИТОРИНГА СОСТОЯНИЯ ИНФОРМАЦИОННО-ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2024 |
|
RU2841123C1 |








Изобретение относится к способам и средствам мониторинга сетей сложной топологии и объектов, входящих в их состав, и может быть использовано для индикации, контроля состояния и управления параметрами разветвленных сетей сложной топологии различного назначения. Техническим результатом является повышение надежности и достоверности представления данных о топологии сети и входящих в ее состав объектов управления, с одновременным формированием сигналов аварийно-предупредительной сигнализации, подачей управляющих воздействий и контролем за устранением неисправностей. Способ визуализации и управления в сети сложной топологии и система для его осуществления обеспечивают, при сохранении целостности 3D представления об объектах управления и всей топологии в целом, формирование на одном экране на различных уровнях представления сигналов аварийно-предупредительной сигнализации, подачу управляющих воздействий и контроль устранения неисправности объектов управления, что повышает надежность и достоверность представления данных о топологии сети и входящих в ее состав объектов с одновременным решением задачи управления в сети. 2 н. и 12 з.п. ф-лы, 11 ил.
1. Способ визуализации и управления параметрами разветвленной сети сложной топологии, заключающийся в том, что с помощью консоли управления обменом данных отображают на устройстве отображения и контролируют ход процесса в сети, отличающийся тем, что визуализационно упрощают топологию сети и входящие в ее состав объекты для их единообразного 3D представления с разного удаления и/или ракурса наблюдения с привязкой объектов к их фактическому положению в сети, которые запоминают в блоке баз данных, формируют два противоположных по направлению потока данных, связанных обратной связью: информационный - от индикаторов объектов управления к устройству отображения и управляющий - от устройства отображения к органам управления объектами, производят инициализацию начального состояния консоли управления обменом данных путем опроса баз данных и создают резервную копию данных, проводят проверку правильности подключения консоли управления обменом данных к индикаторам и органам управления объектами, после успешной проверки отображают топологию сети и входящих в нее объектов в виде 3D представлений на N уровнях в зависимости от удаления до точки наблюдения, и/или ракурса наблюдения, и/или вида объекта, и/или движущейся среды, и/или принципа их работы, и/или неисправности, одновременно считывают текущие показания индикаторов, сравнивают их с у ставками и формируют сигналы аварийно-предупредительной сигнализации (АПС), которые визуализируют на устройстве отображения, производят навигацию по топологии сети и объектам, при появлении значимого сигнала АПС подают управляющее воздействие на орган управления объекта управления, контролируют ход процесса отработки управляющего воздействия по показаниям индикаторов объекта управления и записывают ход процесса.
2. Способ по п.1, отличающийся тем, что в блок баз данных записывают базу данных топологии сети и входящих в нее объектов, базу данных 3D представления различных видов топологии сети, базу данных объектов с принципом их работы и неисправностями, базу данных 3D представления различных видов объектов, базу данных индикаторов, базу данных 3D представления различных видов индикаторов, базу данных сред, базу данных 3D представления различных видов сред, базу данных управляющих воздействий и базу данных уставок, при этом различные уровни представления зависят от расстояния до точки наблюдения, ракурса наблюдения, вида объекта, принципа их работы, неисправности, движущейся среды.
3. Способ по п.1, отличающийся тем, что проверку правильности подключения консоли управления обменом данных к объектам управления производят путем сравнения данных об индикаторах и органах управления объектами, описанных в базе данных, с результатами реального опроса индикаторов и органов управления объектами доступных объектов управления, и при их совпадении сравнивают показания индикаторов объектов управления с заданными уставками и определяют возможность подключения консоли управления обменом данных к объектам управления вне зоны аварийной работы объектов управления.
4. Способ по п.1, отличающийся тем, что каждую следующую резервную копию данных создают через установленный интервал времени при подаче управляющего воздействии или существенном изменении параметров сети.
5. Способ по п.1, отличающийся тем, что при представлении сети на первом уровне, который соответствует наибольшему расстоянию до точки наблюдения, отображают всю сеть в целом, объекты управления в текущем состоянии и/или принцип их работы и/или детализацию индикаторов и органов управления простых объектов управления, сигналы АПС и доступные управляющие воздействия.
6. Способ по п.1, отличающийся тем, что логически связанные в базе данных объекты сети выделяют из общей топологии сети в выбранный логически обусловленный фрагмент топологии сети на основе взаимных связей и отображают в ярко выделенном и/или полупрозрачном виде на изображении и/или в отдельном окне.
7. Способ по п.1, отличающийся тем, что на более близких удалениях от точки наблюдения, которые соответствуют последующим уровням представления, отображают детализацию индикаторов и органов управления объектами простых объектов управления и/или принцип их работы, детализацию вложенных изолированных и/или замкнутых систем управления сложными объектами управления и/или принцип их работы, сигналы АПС и доступные управляющие воздействия.
8. Способ по п.5, отличающийся тем, что детализацию объектов, информационных и управляющих воздействий, соответствующих текущему уровню представления, отображают на изображении, соответствующем данному уровню, и/или в полупрозрачном виде на изображении, соответствующем предыдущему уровню и/или в отдельном окне.
9. Способ по п.1, отличающийся тем, что объекты, входящие в топологию сети, выполняют в виде 3D представления целиком и/или с сегментным разрезом, через который наглядно демонстрируют принципы его работы, движение сред и/или перемещающего содержимого внутри объекта, цветовую индикацию состояния поверхностей в зависимости от протекающих сред и/или перемещающегося содержимого, рабочие состояния и неисправности объекта.
10. Способ по п.1, отличающийся тем, что движение среды или перемещение содержимого внутри объектов отображают в полупрозрачном виде на общей топологии сети в виде анимированной вставки, состав и раскраска которой зависят от режима, состава и направления движущихся сред и/или перемещающего содержимого.
11. Способ по п.1, отличающийся тем, что перемещение по сети осуществляют с помощью отображаемого в полупрозрачном виде навигатора, который эргономически связан с рукой оператора и содержит панель управления и окно навигатора, при этом панель управления выполнена с возможностью постраничного представления: органов управления в виде экранных форм и/или органов управления, реализованных в виде внешних устройств и пультов управления, справочной информации, прочностных характеристики и уставок АПС, а окно навигатора выполнено с возможностью отображения размера полного изображения сети, а также размера и положения просматриваемого в данный момент фрагмента сети.
12. Система для визуализации и управления параметрами разветвленной сети сложной топологии, содержащая устройство отображения, к входу которого подключена консоль управления обменом данных, второй вход/выход которой связан с входами/выходами объектов управления сети, каждый из которых содержит индикаторы и органы управления объектами, причем выходы индикаторов и входы органов управления объектами соединены с входом/ выходом соответствующего объекта управления, отличающаяся тем, что консоль управления обменом данных содержит блок баз данных и синхронизации, блок формирования изображения, блок управления обменом данных, блок записи резервных копий данных, блок записи хода процесса, последовательно соединенные блок приема показаний индикаторов, блок формирования сигналов аварийно-предупредительной сигнализации (АПС) и блок хранения данных индикаторов, последовательно соединенные блок хранения управляющих воздействий, блок формирования управляющих воздействий и блок отправки управляющих воздействий, при этом выход блока хранения данных индикаторов соединен с первым входом блока записи резервных копий данных и с первым входом блока формирования изображения, вход/выход блока управления обменом данных связан с первыми входами/выходами блока баз данных и синхронизации и блока хранения управляющих воздействий и с вторыми входами/выходами блока формирования изображения и блока записи резервных копий данных, вход/выход блока баз данных и синхронизации связан с третьим входом/выходом блока формирования изображения, с вторыми входами блока хранения данных индикаторов, блока хранения управляющих воздействий, блока формирования сигналов АПС и блока формирования управляющих воздействий, выходы блока приема показаний индикаторов, блока формирования сигналов АПС, блока формирования управляющих воздействий и блока отправки управляющих воздействий соединены с входной шиной блока записи хода процесса, а индикаторы и органы управления объектами связаны соответственно с блоком приема показаний индикаторов и с блоком отправки управляющих воздействий.
13. Система по п.12, отличающаяся тем, что блок баз данных и синхронизации содержит базы данных и блоки синхронизации, связанные двухсторонними связями с шиной данных обмена, к которой подключен первый вход блока и которая является вторым входом/выходом блока, при этом базы данных включают базу данных 3D представления различных видов топологии сети, базу данных объектов с принципом их работы и неисправностями, базу данных 3D представления различных видов объектов, базу данных индикаторов, базу данных 3D представления различных видов индикаторов, базу данных сред, базу данных 3D представления различных видов сред, базу данных управляющих воздействий и базу данных уставок, а блоки синхронизации включают блок синхронизации команд управления, блок синхронизации передачи данных по топологии сети, блок синхронизации передачи данных по объектам сети, блок синхронизации данных АПС и блок синхронизации данных хранения.
14. Система по п.12, отличающаяся тем, что блок формирования изображения содержит блоки построения изображения от 1-го до N-го уровня, блок формирования изображения навигатора, блок моделирования столкновений и оценки расстояния и блоки формирования представления, которые включают блок формирования представления о средах, блок формирования представления о данных АПС, блок формирования представления о логически выделенных фрагментах сети, блок формирования представления об индикаторах, блок формирования представления об органах управления, блок формирования представления о видимых объектах и их разрезах, при этом первые входы/выходы блока моделирования и блоков формирования представления соединены с первой шиной связи, к которой подключены также первый, второй и третий входы блока формирования изображения, вторые входы/выходы блока моделирования столкновений и оценки расстояния, блоков формирования представления, первые входы/выходы блоков построения изображения от 1-го до N-го уровня и первый вход/ выход блока формирования изображения навигатора связаны с второй шиной связи, а выходы блоков построения изображения от 1-го до N-го уровня и выход блока формирования изображения навигатора связаны с выходной шиной блока.
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ОБ ОБЪЕКТАХ КОНТРОЛИРУЕМОГО ДИСПЕТЧЕРСКОГО КРУГА | 1996 |
|
RU2107940C1 |
| RU 2004127836 A, 20.02.2006 | |||
| СПОСОБ ДИНАМИЧЕСКОЙ ВИЗУАЛИЗАЦИИ ДАННЫХ ОБ ОБЪЕКТЕ | 1998 |
|
RU2142162C1 |
| US 7082340 B2, 25.07.2006 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

