Изобретение относится к системам информационной поддержки принятия решений в горнодобывающей отрасли, а именно к системам поддержки принятия решений операторов карьерных экскаваторов (СППРОКЭ), и может быть использована в ходе ежедневной эксплуатации машин при экскавации горной породы и в процессе обучения операторов по управлению экскаваторами.
Известна автоматизированная система управления технологическим процессом [АСУ ТП карьерного экскаватора. URL. - https://habr.com/ru/company/phoenix_contact/blog/469525/ (дата обращения: 11.04.2022)], которая обеспечивает: контроль параметров системы передвижения; мониторинг износа оборудования; защиту оборудования от внешних и внутренних угроз: перегрузки, короткие замыкания и так далее; энергоучет; контроль положения экскаватора; осмотр оборудования во время работы; контроль «слепых зон»; мониторинг показателей работы экскаватора; ведение журнала событий; передачу данных для централизованного учета.
АСУ ТП экскаватора включает в себя следующие системы.
Для мониторинга параметров передвижения устанавливаются контроллеры. Оператор следит за следующими параметрами: работа систем управления приводов, температура нагрева узлов системы, давление в пневмосистеме, густота смазки.
Для учета потребленной и отданной активной и реактивной электрической энергии устанавливается счетчик электроэнергии. Слепые зоны, работа механического оборудования и рабочий забой выводятся на экран оператора. Для этого устанавливаются видеокамеры. Для вычисления и учета показателей работы экскаватора используются данные из контроллеров. Показатели вычисляют за определенной временной интервал: за смену, за месяц, по бригадам. Все события сохраняются в журнал событий и хранятся необходимый интервал времени.
Известна информационно-диагностическая система (ИДС) экскаватора [Малафеев, С.И. Информационные и управляющие компоненты электрических карьерных экскаваторов / С.И. Малафеев, С.С. Малафеев // Горный информационно-аналитический бюллетень. - 2021. - №4 - С.33-45], которая содержит модель ограничений и аварийной защиты, модель надежности и прогнозирования ресурса, модель эффективности использования ресурсов системы, программную систему обработки и архивирования данных, архив и базу данных эксплуатации машины, отчеты о работе, модель эффективности технологического процесса, архив и базу данных жизненного цикла, физические и математические модели системы и компонентов, контроллер, два монитора, сервер и модем, при этом элементы системы связаны CAN-шиной и шиной ETHERNET. ИДС выполняет следующие основные функции:
- определение показателей, характеризующих состояние машины и всех ее компонентов в течение рабочей смены, а также режимы ее работы - нагрузки силовых компонентов, скорость передвижения, время рабочего цикла и т.д.;
- сбор и обработку выходных сигналов от датчиков процессов и управляющих устройств экскаватора;
- анализ состояния всех компонентов, диагностику, прогнозирование ресурсов;
- сбор данных о состоянии всех систем защиты, формирование предупреждений, обнаружение неисправностей и анализ причин отказов; регистрацию аварийных процессов; регистрацию и архивирование данных;
определение количественных показателей, характеризующих объемы выполненной экскаватором работы, динамику их изменения в течение смены, расход энергии за этот период с определенной дискретностью во времени и др.;
- представление данных о работе компонентов для оператора;
- формирование отчетов о работе машины за смену или другие интервалы времени.
Общими недостатками известной АСУ ТП и известной ИДС являются отсутствие оперативных рекомендаций оператору экскаватора по улучшению показателей и безопасности его работы при экскавации, а также отсутствие возможности обучения операторов по управлению экскаваторами.
В основу заявляемого изобретения СППРОКЭ поставлена задача повысить функциональную надежность и эффективность работы карьерного экскаватора за счет выдачи оператору оперативных рекомендаций по улучшению контроля состояния систем экскаватора, технологических процессов экскавации и оптимизации действий оператора, а также за счет возможности тренировки операторов по управлению экскаваторами.
Поставленная задача решается тем, что система поддержки принятия решений операторов карьерных экскаваторов, согласно изобретению, характеризуется тем, что она содержит вычислительный блок, блок внешнего оборудования, конвертор CAN-шины системы автоматизированного управления экскаватора, устройство визуализации, монитор с сенсорной панелью управления и радиомодем, связанные с вычислительным блоком шиной входа/выхода вычислительного блока, при этом вычислительный блок содержит блок управления режимами работы, блок приема и обработки первичных данных, включающий, по крайней мере, модуль парсинга данных внешнего оборудования, модуль парсинга данных систем экскаватора и модуль парсинга моделируемых данных, систему управления базами данных, включающую, по крайней мере, базу данных хранения первичных данных, базу данных хранения проанализированных данных и базу данных хранения событий, блок цифрового двойника, включающий, по крайней мере, модуль расчета параметров оборудования и положения экскаватора, модуль выдачи параметров оборудования и положения экскаватора и модуль выдачи параметров для режима тренажера, блок анализа и контроля, включающий, по крайней мере, модуль контроля параметров оборудования и положения экскаватора, модуль принятия решений и генерации сообщений о нарушении в работе оборудования и положения экскаватора и модуль анализа действий оператора, блок вывода данных, включающий, по крайней мере, модуль легирования, модуль формирования записи данных и модуль формирования изображений сообщений и визуализации подсказок, при этом первые входы модуля парсинга моделируемых данных, базы данных хранения событий, модуля формирования записи данных и модуля формирования изображений сообщений и визуализации подсказок, первые выходы модуля парсинга данных внешнего оборудования и модуля парсинга данных систем экскаватора и блока управления режимами работы связаны с сетевой шиной вычислительного блока односторонними связями входа/выхода, соответственно, первые входы/выходы базы данных хранения первичных данных, базы данных хранения проанализированных данных, модуля расчета параметров оборудования и положения экскаватора, модуля выдачи параметров оборудования и положения экскаватора и модуля выдачи параметров для режима тренажера, модуля контроля параметров оборудования и положения экскаватора, модуля принятия решений и генерации сообщений о нарушении в работе оборудования и положения экскаватора, модуля анализа действий оператора и модуля логирования связаны с сетевой шиной вычислительного блока двухсторонними связями, вторые входы модуля парсинга данных внешнего оборудования, модуля парсинга данных систем экскаватора, модуля расчета параметров оборудования и положения экскаватора и блока управления режимами работы, вторые выходы модуля парсинга моделируемых данных, модуля выдачи параметров для режима тренажера, базы данных хранения событий, модуля формирования записи данных и модуля формирования изображений сообщений и визуализации подсказок, связаны с шиной входа/выхода вычислительного блока односторонними связями входа/выхода, соответственно.
Кроме того:
- блок внешнего оборудования содержит связанную с выходом блока локальную вычислительную сеть, к который подключены, по крайней мере, камера распознавания номеров самосвалов, камера мониторинга зубьев ковша, идентификатор оператора, идентификатор экскаватора, GPS-модульный приемник, датчик дождя, бортовой самописец и выход конвертора 39 CAN-ETHERNET, к входу которого подключена CAN-шина группы радаров-дальномеров;
- устройство визуализации выполнено в виде индикатора на лобовом стекле кабины оператора с выводом информации в графическом и текстовом виде;
- в качестве идентификатора оператора применен RFID-считыватель;
- в качестве идентификатора экскаватора применен RFID-считыватель. Повышение функциональной надежности и эффективности работы карьерного экскаватора достигается за счет выдачи оператору подсказок по параметрам системы передвижения; износу оборудования и положению экскаватора, мониторинга показателей работы экскаватора; ведения журнала событий; передачи данных на крышу карьера для централизованного учета и оценки экономической эффективности работы экскаватора, возможности обучения и тренировок оператора по управлению экскаватором при переводе системы в тренажерный режим.
Изобретение иллюстрируется чертежами, на которых: фиг.1 изображает структурную электрическую схему системы; фиг.2 изображает структурную электрическую схему блока внешнего оборудования.
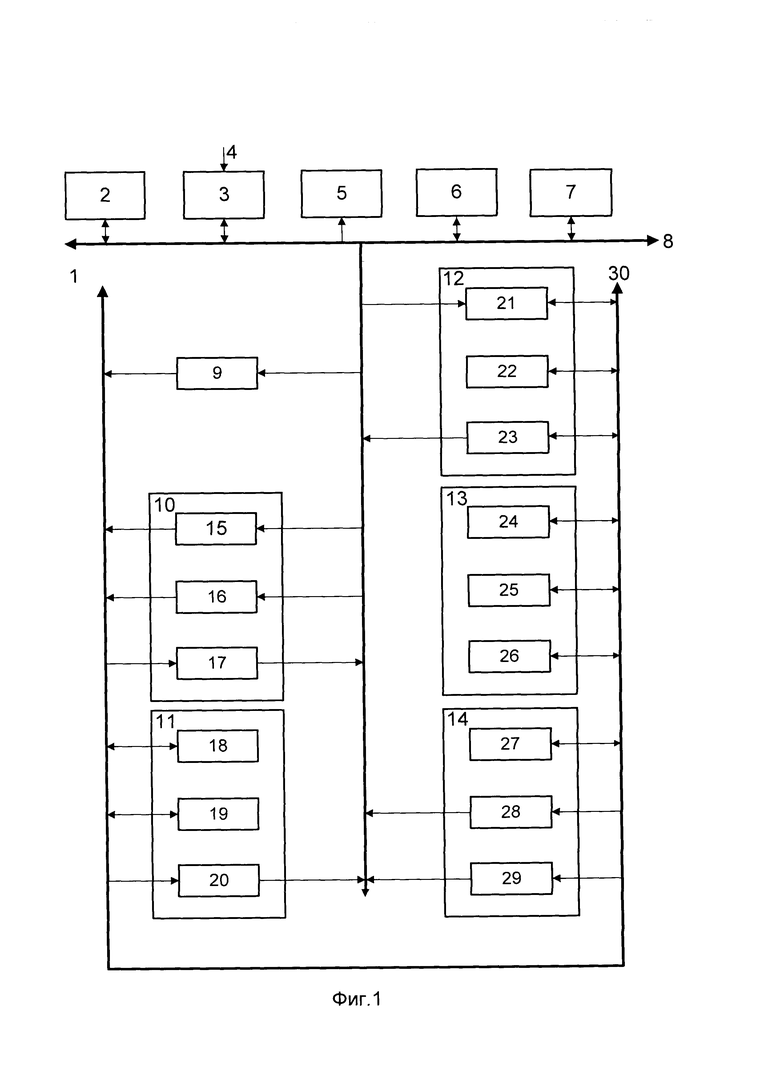
СППРОКЭ содержит вычислительный блок 1, блок внешнего оборудования 2, конвертор 3 CAN-шины 4 системы автоматизированного управления экскаватора, устройство визуализации 5, монитор 6 с сенсорной панелью управления и радиомодем 7, связанные с вычислительным блоком 1 шиной 8 входа/выхода вычислительного блока. Вычислительный блок 1 содержит блок 9 управления режимами работы, блок 10 приема и обработки первичных данных, систему 11 управления базами данных (СУБД), блок 12 цифрового двойника, блок 13 анализа и контроля и блок 14 вывода данных.
Блок 9 управления режимами работы предназначен для переключения оператором работы СППРОКЭ из режима поддержки принятия решений в режим тренажера и обратно. Выбор режима определяет состав работающего оборудования и оценку его параметров.
Блок 10 приема и обработки первичных данных включает модуль 15 парсинга данных внешнего оборудования, модуль 16 парсинга данных систем экскаватора и модуль 17 парсинга моделируемых данных.
Система 11 управления базами данных включает базу 18 данных хранения первичных данных, базу 19 данных хранения проанализированных данных и базу 20 данных хранения событий.
Блок 12 цифрового двойника включает модуль 21 расчета параметров оборудования и положения экскаватора, модуль 22 выдачи параметров оборудования и положения экскаватора и модуль 23 выдачи параметров для режима тренажера.
Блок 13 анализа и контроля включает модуль 24 контроля параметров оборудования и положения экскаватора, модуль 25 принятия решений и генерации сообщений о нарушении в работе оборудования и положения экскаватора и модуль 26 анализа действий оператора.
Блок 14 вывода данных, включает модуль 27 логирования, модуль 28 формирования записи данных и модуль 29 формирования изображений сообщений и визуализации подсказок.
Первые входы модуля 17, базы 20, модуля 28 и модуля 29 подключены к сетевой шине 30 вычислительного блока. Первые выходы модуля 15, модуля 16 и блока 9 соединены с сетевой шиной 30 вычислительного блока. Первые входы/выходы базы 18, базы 19, модуля 21, модуля 22, модуля 23, модуля 24, модуля 25, модуля 26 и модуля 27 связаны с сетевой шиной 30 вычислительного блока двухсторонними связями. Вторые входы модуля 15, модуля 16, модуля 21 и блока 9 подключены к шине 8 входа/выхода вычислительного блока. Вторые выходы модуля 17, модуля 23, базы 20, модуля 28 и модуля 29 соединены с шиной 8 входа/выхода вычислительного блока.
Блок 10 обеспечивает съем, регистрацию, сбор и передачу значений показателей, характеризующих карьерный экскаватор, и технологический процесс его деятельности. При этом модуль 15 обеспечивает получение первичной информации (параметров) внешнего оборудования и обеспечивает выполнение анализа соответствующих технологических процессов, связанных с работой карьерного экскаватора, модуль 16 обеспечивает получение первичной информации (эксплуатационных данных) параметров устройств и агрегатов карьерного экскаватора, а модуль 17 обеспечивает получение первичной информации в режиме работы тренажера.
Система 11 реализована в виде многомерной базы данных и обеспечивает хранение и обработку информацию в виде упорядоченных многомерных массивов. При этом в базе 18 хранятся первичные данные, в базе 19 - проанализированные данные, а в базе 20 - значения технологических параметров во времени и информация о событиях с целью их дальнейшего анализа и использования для управления.
Хранилища построены по блочному типу, поскольку данный формат обеспечивает повышенную производительность для критически важных приложений, и может использоваться для виртуализации (что значимо для режима тренажера).
Блок 12 цифрового двойника связывает физическое и цифровое оборудование и отвечает за управление технологическим процессом. Цифровой двойник карьерного экскаватора является виртуальной копией карьерного экскаватора [Иванов А.С. Цифровой двойник карьерного электрического экскаватора / А.С. Иванов, Д.М. Костыгова, Д.В. Казунин // Горный информационно-аналитический бюллетень (научно-технический журнал). -. 2019 - №S37. - С. 151-157]. Модуль 21 расчета параметров оборудования и положения экскаватора реализует систему выражений, обеспечивающих определение координат всех точек рабочего оборудования при изменении положения экскаватора, а также состояния электрических, пневматических систем экскаватора и температуры нагруженных систем. Исходные данные поступают из модуля 15 парсинга данных внешнего оборудования и модуля 16 парсинга данных систем карьерного экскаватора, в котором применяется алгоритм вычислений, построенный на прямом математическом моделировании физических процессов. Модуль 22 выдачи параметров оборудования и положения экскаватора выполняет целевую функцию выдачи привязанных ко времени определений параметров оборудования и положения. Модуль 23 выдачи параметров для режима тренажера формирует параметры оборудования и положения экскаватора, а также параметры, необходимые для восстановления проекции внешней среды и картины состояния технических систем.
Блок 13 анализа и контроля предназначен для моделирования и воспроизведения производственно-технологической цепочки с участием карьерного экскаватора, отвечает за сообщения автоматизированной системы, оптимизацию его загрузки и работу технических служб. Модуль 24 обеспечивает мониторинг контролируемых параметров оборудования, обработку и вычисление функции определения признака технического состояния «отказ/работоспособность» и осуществляет передачу признаков состояния и значений контролируемых параметров в модуль 25 принятия решений и генерации сообщений о нарушении в работе оборудования и положения экскаватора. Модуль 25 содержит набор правил принятия решений и набор правил выбора соответствующих моделей возможных действий, а модуль 26 обеспечивает нахождение эффективного варианта действия (решения) оператора на основе выбранного метода.
Блок 14 обеспечивает воспроизведение и регистрацию результатов обработки информации в форме, удобной для непосредственного использования, при этом модуль 27 логирования предназначен для отображения всех изменений в системе в соответствии с уровнем или серьезностью отслеживаемых событий. Модуль 28 получает данные, необходимые для отправки, из базы 19 проанализированных данных, упаковывает их и передает на радиомодем 7. Модуль 29 формирует изображения сообщений и визуализации подсказок, в которых выделенные значимые взаимосвязи и ключевые показатели демонстрируются для отслеживания результатов действий оператора в режиме реального времени. Данные поступают на устройство визуализации и на монитор.
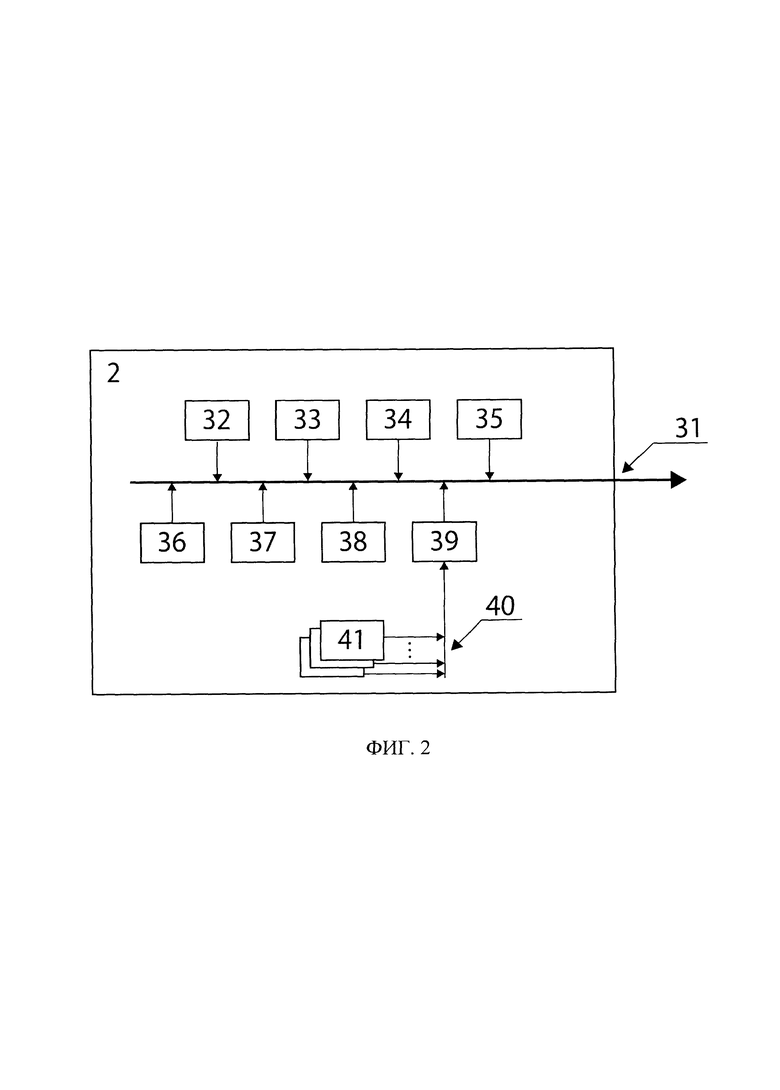
Блок 2 внешнего оборудования содержит связанную с выходом блока локальную вычислительную сеть 31, к который подключены по крайней мере, камера 32 распознавания номеров самосвалов, камера 33 мониторинга зубьев ковша, идентификатор 34 оператора, идентификатор 35 экскаватора, GPS-модульный приемник 36, датчик 37 дождя, бортовой самописец 38 и выход конвертора 39 CAN-ETHERNET, к входу которого подключена CAN-шина 40 группы радаров-дальномеров 41.
Идентификаторы 34 и 35 предназначены для опознавания оператора и экскаватора при получении допуска к работе в системе. Предпочтительно в качестве идентификатора использовать RFID-считыватели. Элементы системы 32, 33, 36, 37 и 41 используются по прямому назначению в качестве датчиков данных, необходимых для функционирования системы.
В качестве исходных данных для СППРОКЭ используются также данные системы автоматизированного управления экскаватора [см., например, АСУ ТП карьерного экскаватора URL: habr.com>ru/company/phoenix_contact/blog/469525/ (дата обращения: 10.10.20)], которые поступают от CAN-шины 4 системы автоматизированного управления экскаватора через конвертор 3 CAN-шины на шину 8 входа/выхода вычислительного блока.
Устройство визуализации 5 предназначено для отображения рекомендаций системы и предпочтительно может быть выполнено в виде индикатора на лобовом стекле кабины оператора с выводом информации в графическом и текстовом виде.
Монитор 6 с сенсорной панелью управления предназначен для подачи команд оператора по управлению системой, а также применяется в качестве дублирующего средства при затруднении наблюдения на индикаторе на лобовом стекле при наличии засветок.
Радиомодем 7 предназначен для передачи на крышу карьера данных о выявленных опасных событиях, а также показателей работы карьерного экскаватора.
Перед началом работы в систему вводятся данные оператора и экскаватора, которые используются для идентификации оператора перед началом работы и построения системы регистрации/смены оператора, регистрации его действий и построения отчетности. Команда оператора с монитора 6 поступает на блок 9 управления режимами работы для установки режима работы СППРОКЭ: поддержки принятия решений/режим тренажера. Выбор режима определяет состав работающего оборудования и оценку его параметров.
В режиме тренажера данные моделируются на основании физических законов и выдаются в качестве симулированного поведения с сохранением ключевых свойств и принципов работы карьерного экскаватора.
При функционировании системы решаются следующие задачи эксплуатации: контроль параметров системы передвижения; мониторинг износа оборудования; защита оборудования от внешних и внутренних угроз: перегрузки, короткие замыкания и так далее; контроль положения экскаватора; контроль «слепых зон»; мониторинг показателей работы экскаватора; ведение журнала событий; передача данных для централизованного учета и оценки экономической эффективности работы экскаватора.
Основными входными сигналами СППРОКЭ являются:
- сигналы, получаемые от CAN-шины системы автоматизированного управления карьерного экскаватора:
управляющие команды оператора карьерного экскаватора; параметры работы систем карьерного экскаватора;
- сигналы, получаемые от блока внешнего оборудования;
- загруженные в систему данные по грунтам заданного карьера;
- загруженные в систему технологические регламенты работы карьера, определяющие:
правила работы техники в заданном карьере и порядок действий оператора экскаватора;
предельно допустимые значения для контролируемых параметров;
- требуемые показатели работы оператора.
Основными выходными реакциями системы поддержки принятия решений являются:
- отображение в графическом и текстовом виде на фронтальных стеклянных поверхностях кабины экскаватора оперативных рекомендаций системы поддержки принятия решений:
- рекомендации о возможности совершения маневра перемещения ходом;
- рекомендации при совершении маневра поворота;
- рекомендации при выемке породы:
- рекомендации при работе приводов напора и подъема:
- рекомендации на проверку оборудования (ранняя диагностика) при значительных отклонениях параметров реальной машины от параметров цифрового двойника, входящего в систему, при поступлении одинаковых управляющих воздействий на цифровой двойник и на реальную машину;
- рекомендации, направленные на улучшение показателей работы оператора;
- сохранение записей в журнале событий о выявленных опасных событиях;
- рекомендаций на проверку оборудования (ранняя диагностика);
- формирование данных для передачи на крышу карьера о выявленных опасных событиях.
Реализация оператором указанных рекомендаций обеспечивает повышение функциональной надежности и эффективности работы карьерного экскаватора.
Заявляемая система поддержки принятия решений операторов карьерных экскаваторов может быть использована как при разработке новых экскаваторов, так и при модернизации экскаваторов, находящихся в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ САМОСВАЛА С ПОМОЩЬЮ ЦИФРОВОГО СОВЕТЧИКА ВОДИТЕЛЮ | 2021 |
|
RU2774512C1 |
| Тренажерный комплекс для подготовки эксплуатационного персонала Автоматизированных систем управления технологическим процессом (АСУ ТП) | 2019 |
|
RU2699688C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| ТРЕНАЖЕРНО-ОБУЧАЮЩАЯСЯ СИСТЕМА | 2024 |
|
RU2834774C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| СПОСОБ НАСТРОЙКИ СИСТЕМЫ АВТОМАТИЗАЦИИ НА ОСНОВЕ ЦИФРОВОГО ДВОЙНИКА СИСТЕМЫ АВТОМАТИЗАЦИИ ОБЪЕКТА | 2023 |
|
RU2822311C1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| Индивидуальный диспетчерский тренажер для тренинга оперативно-диспетчерского персонала магистральных нефтепроводов | 2015 |
|
RU2639932C2 |
| Сетевой программно-аппаратный комплекс для управления внутренней средой замкнутых помещений | 2021 |
|
RU2790317C1 |
| ТИПОВОЙ ПРОГРАММНО-АППАРАТНЫЙ ТРЕНАЖЕР ЦИФРОВЫХ СИСТЕМ ПЕРЕДАЧИ | 2016 |
|
RU2630770C1 |
Изобретение относится к системам управления карьерных экскаваторов. Технический результат заключается в повышении функциональной надежности и эффективности работы карьерного экскаватора. Технический результат достигается за счет того, что система содержит вычислительный блок, блок внешнего оборудования, конвертор CAN-шины системы автоматизированного управления экскаватора, устройство визуализации, монитор с сенсорной панелью управления и радиомодем, связанные с вычислительным блоком шиной входа/выхода вычислительного блока, при этом система функционирует в двух режимах: поддержки принятия решений и в режиме тренажера, оперативные рекомендации оператору отображаются на индикаторе на лобовом стекле кабины оператора с выводом информации в графическом и текстовом виде и дублируются на мониторе. 4 з.п. ф-лы, 2 ил.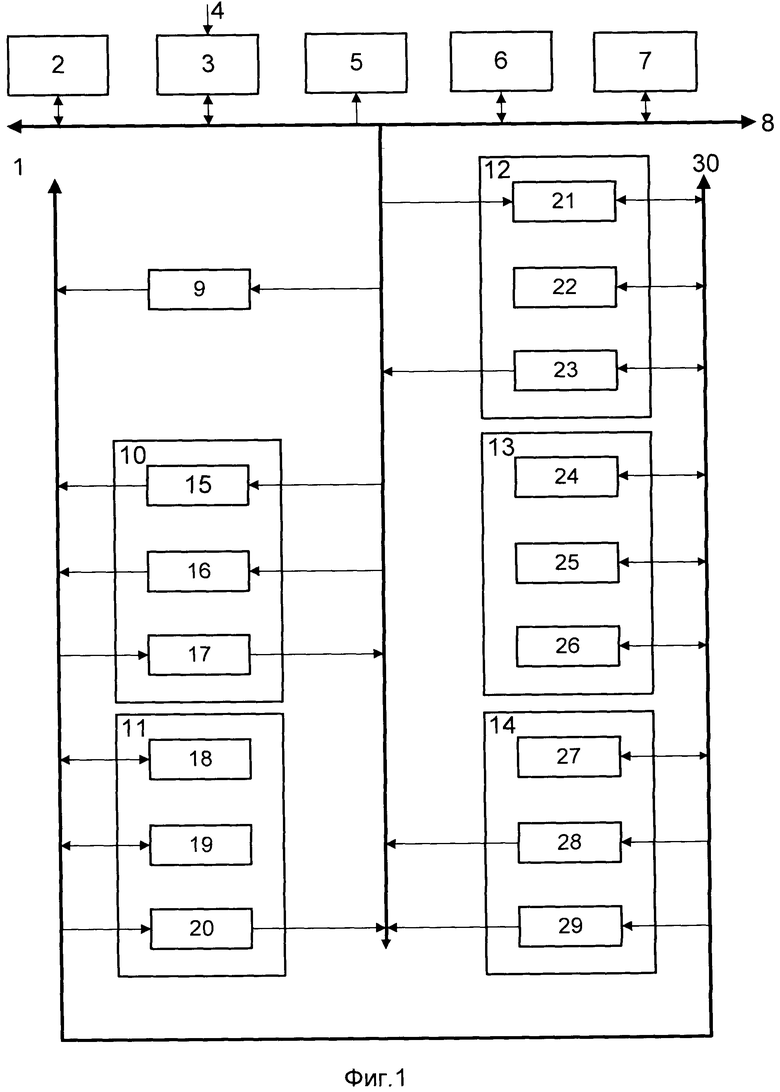
1. Система поддержки принятия решений операторов карьерных экскаваторов, характеризующаяся тем, что она содержит вычислительный блок, блок внешнего оборудования, конвертор CAN-шины системы автоматизированного управления экскаватора, устройство визуализации, монитор с сенсорной панелью управления и радиомодем, связанные с вычислительным блоком шиной входа/выхода вычислительного блока, при этом вычислительный блок содержит блок управления режимами работы, блок приема и обработки первичных данных, включающий по крайней мере модуль парсинга данных внешнего оборудования, модуль парсинга данных систем экскаватора и модуль парсинга моделируемых данных, систему управления базами данных, включающую, по крайней мере, базу данных хранения первичных данных, базу данных хранения проанализированных данных и базу данных хранения событий, блок цифрового двойника, включающий, по крайней мере, модуль расчета параметров оборудования и положения экскаватора, модуль выдачи параметров оборудования и положения экскаватора и модуль выдачи параметров для режима тренажера, блок анализа и контроля, включающий, по крайней мере, модуль контроля параметров оборудования и положения экскаватора, модуль принятия решений и генерации сообщений о нарушении в работе оборудования и положения экскаватора и модуль анализа действий оператора, блок вывода данных, включающий, по крайней мере, модуль логирования, модуль формирования записи данных и модуль формирования изображений сообщений и визуализации подсказок, при этом первые входы модуля парсинга моделируемых данных, базы данных хранения событий, модуля формирования записи данных и модуля формирования изображений сообщений и визуализации подсказок, первые выходы модуля парсинга данных внешнего оборудования и модуля парсинга данных систем экскаватора и блока управления режимами работы связаны с сетевой шиной вычислительного блока односторонними связями входа/выхода, соответственно, первые входы/выходы базы данных хранения первичных данных, базы данных хранения проанализированных данных, модуля расчета параметров оборудования и положения экскаватора, модуля выдачи параметров оборудования и положения экскаватора и модуля выдачи параметров для режима тренажера, модуля контроля параметров оборудования и положения экскаватора, модуля принятия решений и генерации сообщений о нарушении в работе оборудования и положения экскаватора, модуля анализа действий оператора и модуля логирования связаны с сетевой шиной вычислительного блока двухсторонними связями, вторые входы модуля парсинга данных внешнего оборудования, модуля парсинга данных систем экскаватора, модуля расчета параметров оборудования и положения экскаватора и блока управления режимами работы, вторые выходы модуля парсинга моделируемых данных, модуля выдачи параметров для режима тренажера, базы данных хранения событий, модуля формирования записи данных и модуля формирования изображений сообщений и визуализации подсказок, связаны с шиной входа/выхода вычислительного блока односторонними связями входа/выхода, соответственно.
2. Система по п. 1, отличающаяся тем, что блок внешнего оборудования выполнен в виде связанной с выходом блока локальной вычислительной сети, к которой подключены, по крайней мере, камера распознавания номеров самосвалов, камера мониторинга зубьев ковша, идентификатор оператора, идентификатор самосвала, GPS модульный приемник, датчик дождя, бортовой самописец и выход конвертора CAN-ETHERNET, к входу которого подключена CAN шина группы радаров-дальномеров.
3. Система по п. 1, отличающаяся тем, что устройство визуализации выполнено в виде индикатора на лобовом стекле кабины оператора с выводом информации в графическом и текстовом виде.
4. Система по п. 1, отличающаяся тем, что в качестве идентификатора оператора применен RFID-считыватель.
5. Система по п. 1, отличающаяся тем, что в качестве идентификатора экскаватора применен RFID-считыватель.
| СИСТЕМА ВИЗУАЛИЗАЦИИ РАБОТЫ ЭКСКАВАТОРА | 2009 |
|
RU2410498C1 |
| Устройство для зарядки сифонов газированной водой | 1960 |
|
SU137410A1 |
| US 9945095 B2, 17.04.2018 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Способ торможения асинхронного двигателя | 1958 |
|
SU119922A1 |
