Группа изобретений относится к способу рентгеновской томографии и устройству для его осуществления. Область применения охватывает техническую диагностику, например, исследование и аттестацию материалов.
Известны и широко применяются различные способы и устройства рентгеновской томографии, например, рентгеновской диагностики [1, 2].
Существенным признаком этих способов и устройств является то, что формируется рентгеновское излучение, которым облучается объект исследования. По анализу проходящего через объект исследования излучения выносится решение о характеристиках внутренней структуры объекта.
Недостатки способов и устройств заключаются в низкой точности оценки внутренней структуры объекта, малом быстродействии, низких функциональных возможностях (незначительный класс диагностируемых объектов) и опасностью применения для обслуживающего персонала из-за значительного рентгеновского облучения.
В качестве прототипа рассмотрим способ, реализующий рентгеновскую компьютерную томографию [3]. Устройство, реализующее этот способ, содержит блок рентгеновского излучателя, блок электромеханики, выполненный с возможностью обеспечения сканирующих перемещений блока рентгеновского излучателя, на пути выходного рентгеновского пучка которого последовательно расположены исследуемый объект и соответствующий детектор.
Недостатки способа и устройства заключаются в низкой точности восстановления внутренней структуры объекта, невысоких функциональных возможностях, невозможности дефектоскопии объекта, формирования трехмерных цветных псевдоизображений и передачи информации в сеть Интернет, исключения рентгеновского излучения для обслуживающего персонала, отсутствии удобства в работе.
Задача состоит в повышении точности восстановления трехмерной структуры объекта, расширении функциональных возможностей, повышении удобства работы и исключении опасного рентгеновского излучения для обслуживающего персонала.
Решение поставленной задачи достигается тем, что как и в известном способе, в заявленном способе рентгеновской томографии, заключающимся в том, что, облучают и воспринимают массив изображения энергетического спектра рентгеновского излучения, проходящего через объект, при этом, восстанавливают изображения по теневым проекциям объекта, затем формируют, сравнивают и анализируют текущие и эталонные интегральные характеристики изображения объекта, определяют дефекты объекта и отображают результаты анализа объекта.
Отличие заключается в том, что восстановление трехмерного изображения осуществляют при вращении и смещении объекта по трем взаимно перпендикулярным осям системы координат, связанной с рабочей зоной объекта при корректировке управления последней, а текущие и эталонные интегральные характеристики изображения объекта формируют в виде спектральных и фрактальных признаков.
Кроме того, геометрические признаки локальных и интегральных участков изображений объекта определяют в виде периметров, площадей, радиусов, длины, ширины, количества точек перегиба контура, геометрических центров элементов изображений.
Также формируют псевдоцветные изображения внутренней микроструктуры объекта.
И уменьшают до безопасного уровня рентгеновское излучение и вибрацию.
Поставленная задача достигается также, что как и известное заявленное устройство рентгеновской томографии содержит последовательно соединенные блок рентгеновского излучения, объект, блок детекторов, первый аналого-цифровой преобразователь и электронно-вычислительную машину, ко второму входу которой подключен второй аналого-цифровой преобразователь, входом соединенный через блок измерения энергетического спектра рентгеновского излучения с вторым выходом блока детектора, а выход электронно-вычислительной машины подключен к блоку электромеханики.
Новым является то, что оно дополнительно содержит, во-первых, последовательно соединенные двунаправленными линиями, введенными между дополнительными выходами и входами электронно-вычислительной машины блок восстановления трехмерных изображений, блок формирования цветных псевдоизображений, блок связи с Интернетом, отдельным входом, подключенным через блок дефектоскопии к отдельному выходу блока восстановления трехмерных изображений, и блок нейросетевого метрологического обеспечения, во-вторых, управляемая рабочая зона, введенная между выходами и входами объекта и блока электромеханики, отдельными двунаправленными линиями, подключенными через блок адаптивного структурно-перестраиваемого управления, соединенным отдельной двунаправленной связью с управляемой рабочей зоной, к электронно-вычислительной машине, в-третьих, между дополнительными выходом и выходом объекта и входами выходами электронно-вычислительной машины включены блок лазерного оптико-телевизионного метрологического обеспечения и второй интерфейс, соединенные двунаправленными линиями, в-четвертых, защитный корпус от рентгеновского излучения и вибрации, отдельным выходом подключенным к второму выходу блока рентгеновского излучения, а первым выходом подключенным к отдельным входам блока рентгеновского излучения, объекта, блока электромеханики, блока детекторов, блока измерения энергетического спектра рентгеновского излучения, первый аналого-цифровой преобразователь, второй аналогово-цифровой преобразователь, блок нейросетевого метрологического обеспечения, блок дефектоскопии, блок восстановления трехмерных изображений и блок формирования цветных псевдоизображений, а другими двунаправленными линиями соединенным с управляемым источником питания, блока регулирования температуры и адаптивного блока виброизоляции, подключенного отдельными двунаправленными линиями через интерфейс к электронно-вычислительной машине, причем, во-первых, блок регулирования температуры соединен двумя отдельными двунаправленными линиями с интерфейсом, а другой отдельной двунаправленной линией соединен с защитным корпусом от рентгеновского излучения и вибрации, во-вторых, управляемый источник питания соединен отдельными двунаправленными линиями с интерфейсом, а выходом - со всеми блоками устройства, в-третьих, блок формирования цветных псевдоизображений подключен к монитору.
Кроме того, управляемая рабочая зона выполнена в виде электромехатронного модуля на основе магнитопроводов-роторов, имеющих возможность смещать исследуемый объект по трем взаимно-перпендикулярным направлениям и разворачивать исследуемый объект вокруг трех взаимно перпендикулярных осей.
Кроме того, упомянутый блок адаптивного структурно-перестраиваемого управления выполнен в виде системы автоматического регулирования с переменной структурой.
Упомянутый блок адаптивного структурно-перестраиваемого управления выполнен в виде системы автоматического регулирования с переменной структурой;
Упомянутый блок лазерного оптико-телевизионного метрологического обеспечения выполнен в виде триангуляционного измерителя положения исследуемого объекта;
Упомянутый блок нейросетевого метрологического обеспечения выполнен в виде адаптивной схемы, содержащей обучаемый слой нейронов и выходной слой нейронов, обеспечивающих калибровку изображений при его четкой и нечеткой кластеризации;
Упомянутый блок восстановления трехмерных изображений выполнен в виде последовательных схем захвата теневых проекций, реконструкции виртуальных сечений, создания предварительных сечений и построения ЗВ-изображения;
Упомянутый блок дефектоскопии выполнен в виде последовательных схем реконструкции методом пространственной области, градиентным методом, корреляционным методом, нейронных сетей и схемы обозначения дефектов, управляемых по запросу пользователя на поиск и анализ дефектов;
Упомянутый блок формирования цветных псевдоизображений выполнен в виде последовательности схем оценки плотностей слоев 3D-реконструкции, сопоставления псевдоцветов различным слоям 3D-реконструкции и формирования 3D-псевдореконструкции изображений;
Упомянутый защитный корпус от рентгеновского излучения выполнен в виде экрана рентгеновского излучения на основе многослойного защитного материала;
Упомянутый адаптивный блок виброизоляции выполнен в виде пружинно-механических демпферов;
Упомянутый блок регулирования температуры выполнен в виде адаптивного регулятора температуры внутри корпуса томографа, содержащего воздушную принудительную вентиляцию и водяной отвод тепла;
Упомянутый управляемый источник питания выполнен в виде бесперебойного источника питания, содержащего блок аккумуляторов, блок солнечной батареи и блок питания от электрической сети.
Предлагаемый способ и устройство иллюстрируется чертежами, представленными на фиг. 1 - фиг. 17.
На фиг. 1 дана структурная схема устройства.
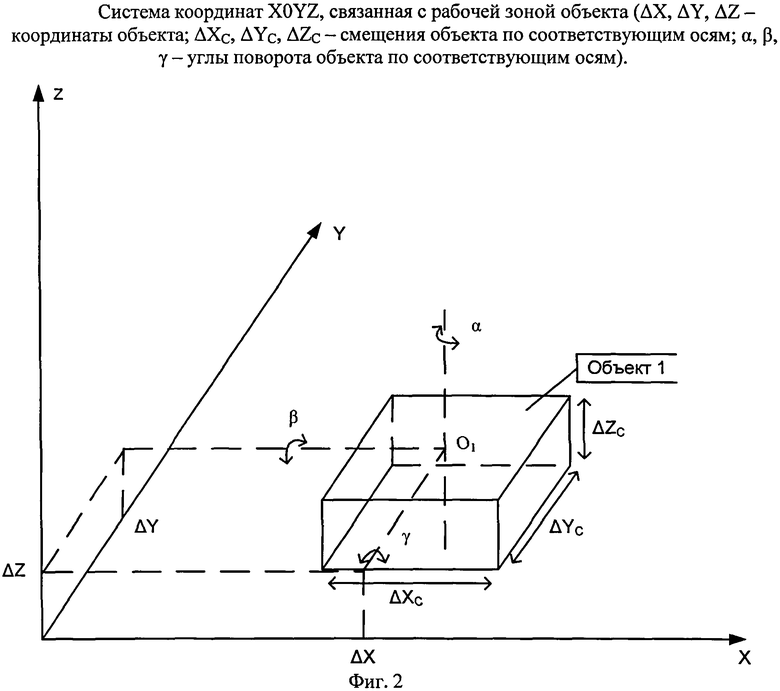
На фиг. 2 показана система координат XOYZ, связанная с рабочей зоной объекта.
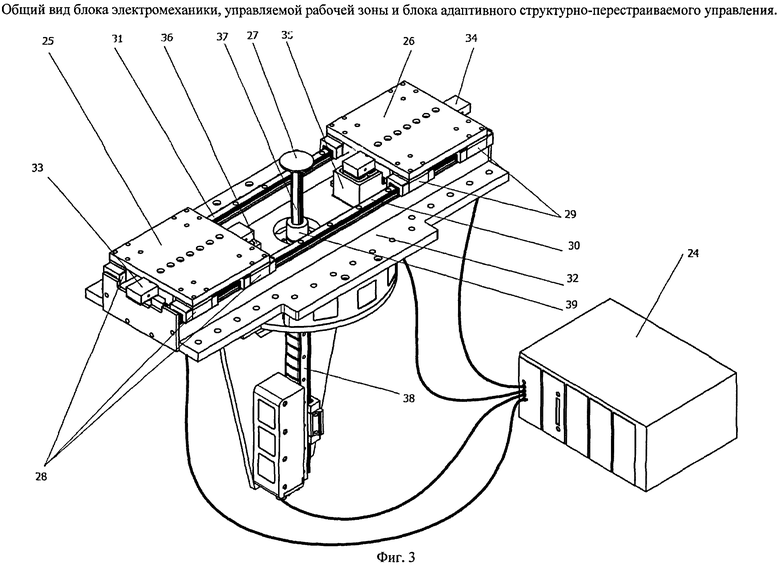
На фиг. 3 представлен общий вид блока электромеханики, управляемой рабочей зоны и блока адаптивного структурно-перестраиваемого управления.
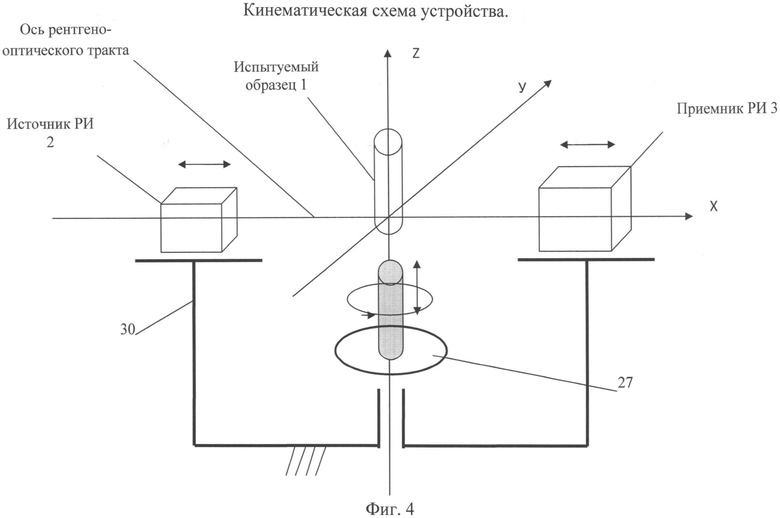
На фиг. 4 представлена кинематическая схема устройства.
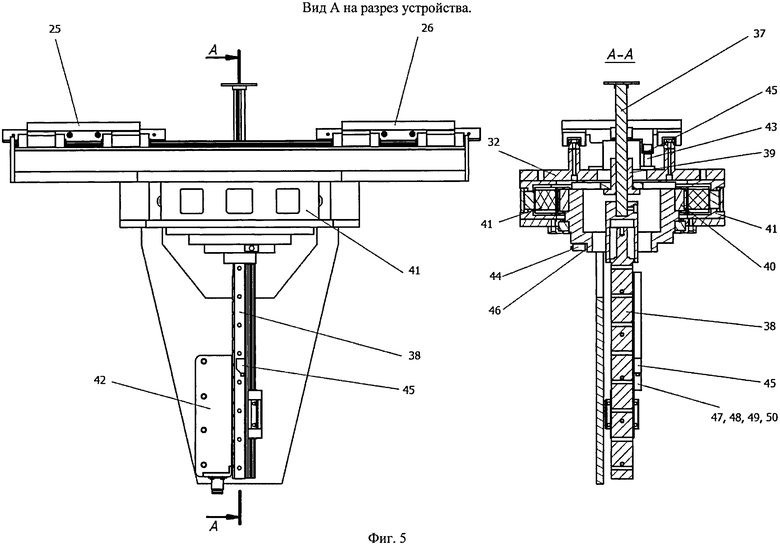
На фиг. 5 дан вид А на разрез устройства (часть блока электромеханики и управляемая рабочая зона).
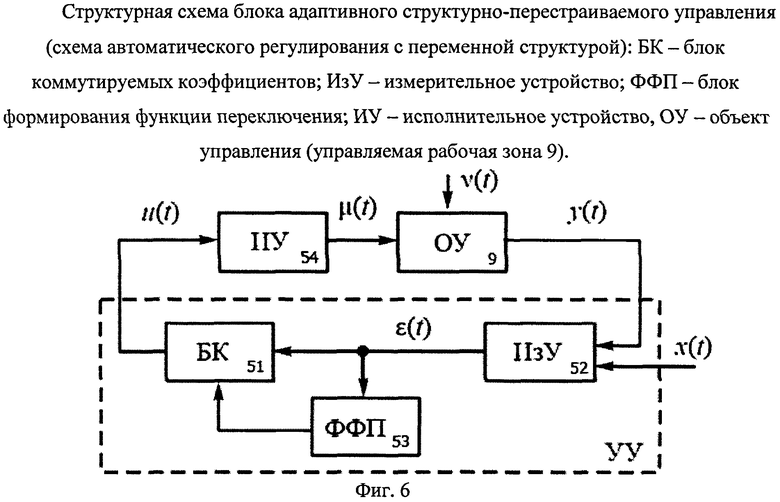
На фиг. 6 показана структурная схема блока адаптивного структурно-перестраиваемого управления.
На фиг. 7 изображен принцип работы блока адаптивного структурно-перестраиваемого управления.
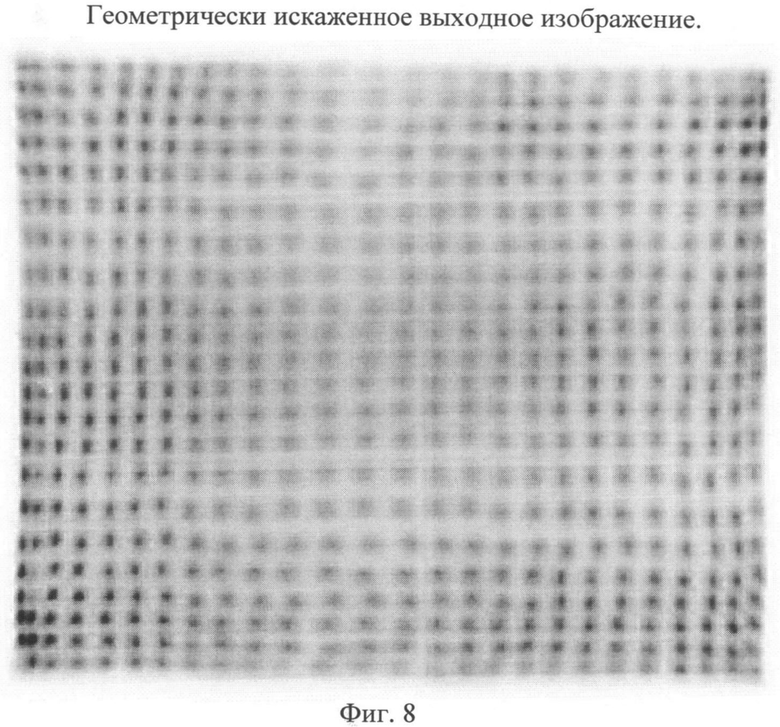
На фиг. 8 представлено геометрически искаженное выходное изображение.
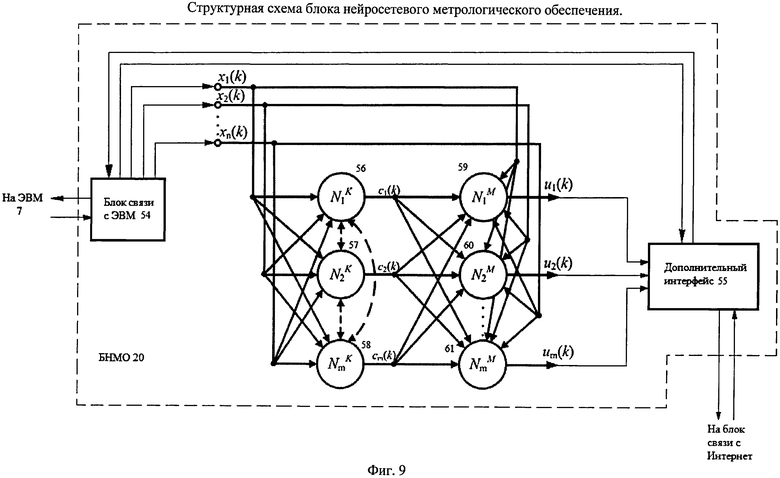
На фиг. 9 дана структурная схема блока нейросетевого метрологического обеспечения.
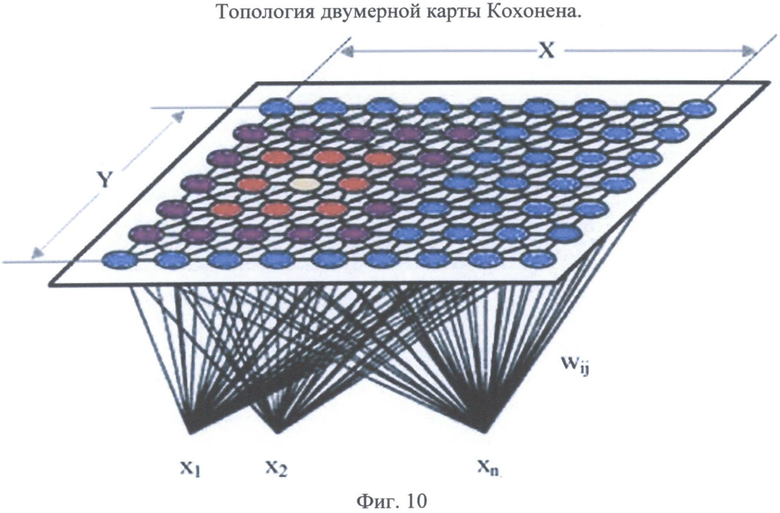
На фиг. 10 показана топология двумерной карты Кохонена.
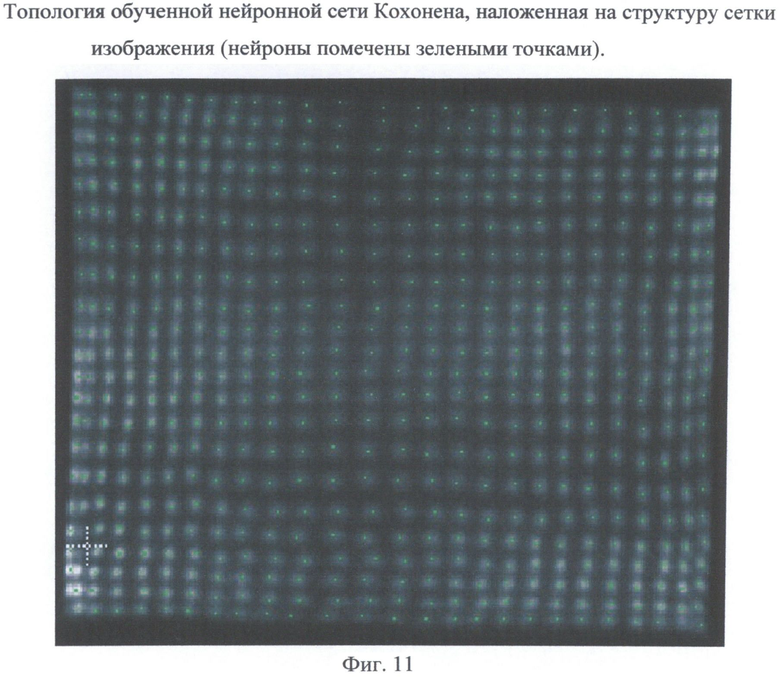
На фиг. 11 изображена топология обученной нейронной сети Кохонена, наложенная на структуру сетки изображения.
На фиг. 12 представлена структурная схема блока восстановления трехмерных изображений.
На фиг. 13 дана структурная схема блока дефектоскопии.
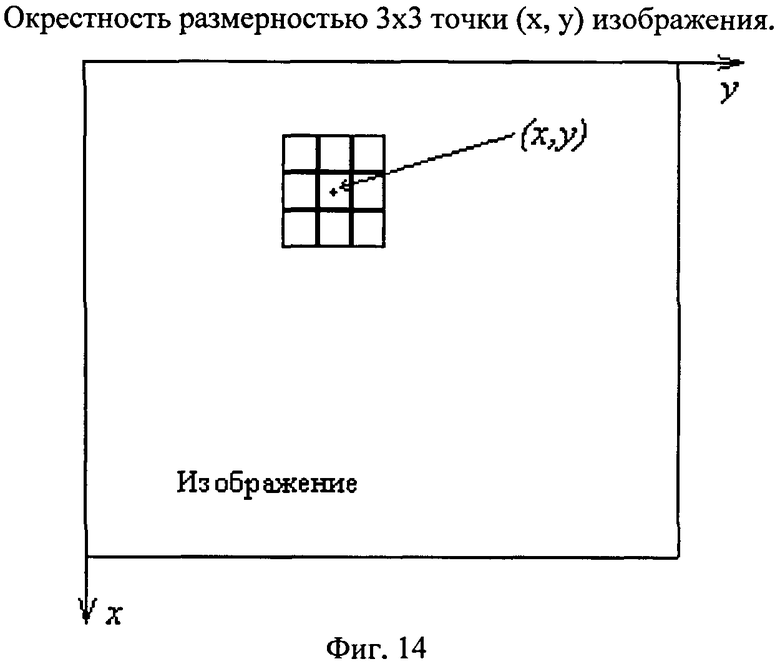
На фиг. 14 показана окрестность размерностью 3×3 точки (х, y) изображения.
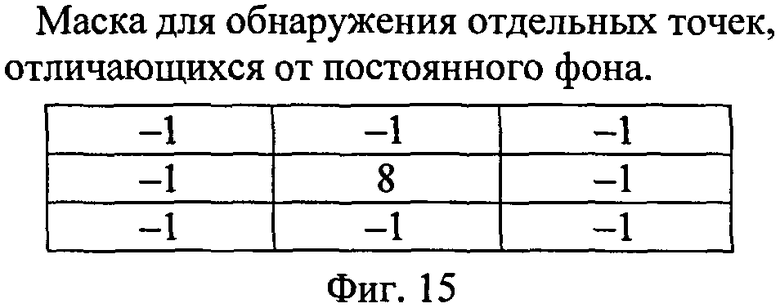
На фиг. 15 изображена маска для обнаружения отдельных точек, отличающихся от постоянного фона.
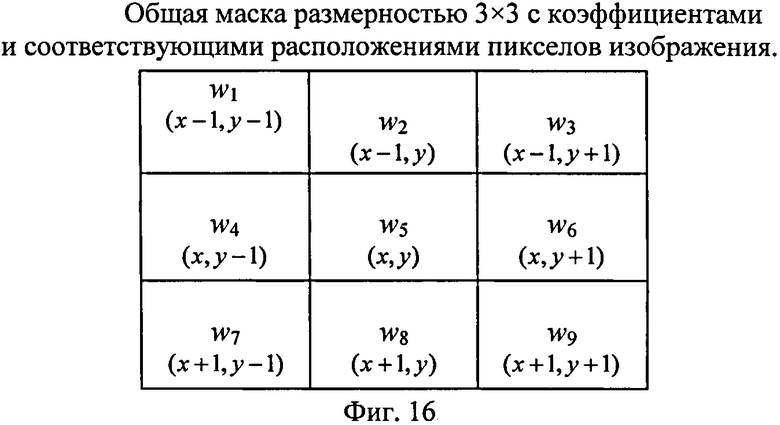
На фиг. 16 представлена общая маска размерностью 3×3 с коэффициентами и соответствующими расположениями пикселов изображения.
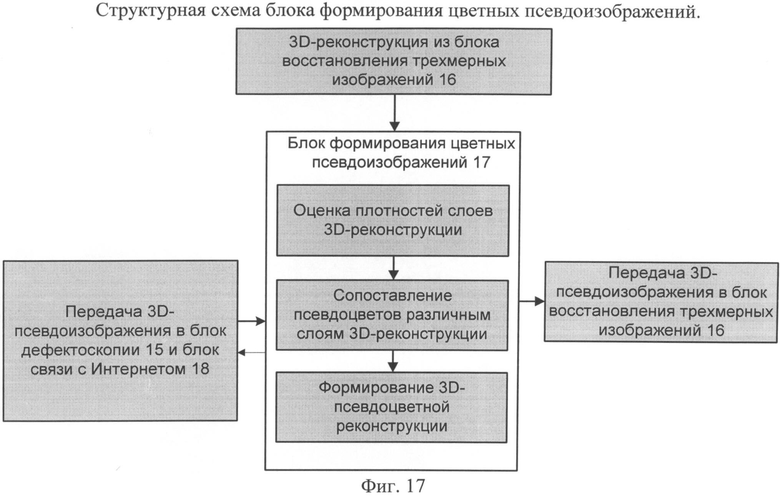
На фиг. 17 дана структурная схема блока формирования цветных псевдоизображений.
На фиг. 1. представлена структурная схема устройства, которая содержит следующие узлы:
1 - объект;
2 - блок рентгеновского излучения (БРИ);
3 - блок детекторов;
4 - первый аналого-цифровой преобразователь (АЦП);
5 - блок измерения энергетического спектра рентгеновского излучения (БИЭСРИ);
6 - второй АЦП;
7 - электронно-вычислительная машина (ЭВМ);
8 - блок электромеханики;
9 - управляемая рабочая зона;
10 - блок адаптивного структурно-перестраиваемого управления (БАСПУ);
11 - защитный корпус от рентгеновского излучения и вибрации (ЗКРИВ);
12 - адаптивный блок виброизоляции;
13 - блок регулирования температуры (БРТ);
14 - интерфейс;
15 - блок дефектоскопии;
16 - блок восстановления трехмерных изображений (БВТИ);
17 - блок формирования цветных псевдоизображений (БФЦП);
18 - блок связи с Интернетом (БСИ);
19 - монитор;
20 - блок нейросетевого метрологического обеспечения (БНМО);
21 - блок лазерного оптико-телевизионного метрологического обеспечения;
22 - второй интерфейс;
23 - управляемый источник питания (УИП).
Устройство работает следующим образом.
Блок рентгеновского излучения (БРИ) 2 облучает объект 1, который размещается на управляемой рабочей зоне (УРЗ) 9. Рентгеновские лучи БРИ 2, проникая через объект 1, поступают на блок детекторов 3, воспринимающий поэлементно полный кадр изображения внутренней структуры объекта 1. Аналоговый сигнал от блока детекторов 3 оцифровывается АЦП 4 и поступает на ЭВМ 7, на второй вход которой приходит цифровой сигнал от второго АЦП 6, преобразующий сигнал от блока измерения энергетического спектра рентгеновского излучения (БИЭСРИ) 5. Этот блок измеряет составляющие спектра сигнала, снимаемого с блока детекторов 3.
Считывание изображения блоком детекторов 3 осуществляется при вращении объекта вокруг вертикальной оси и смещении объекта вдоль вертикальной, горизонтальной и поперечной осей (на фиг.2 показана система координат, повороты и смещения объекта 1). Такие манипуляции с объектом 1 производятся блоком электромеханики 8 через управляемую рабочую зону (УРЗ) 9, куда устанавливается объект 1. Уточнение (корректировка) перемещений УРЗ 9 осуществляется блоком адаптивного структурно-перестраиваемого управления (БАСПУ) 10. Цифровые сигналы от первого АЦП 4 и второго АЦП 6 поступают на ЭВМ 7, которая преобразует сигналы в цифровой массив, отображающий кадр энергетического спектра рентгеновского изображения.
С помощью блока восстановления трехмерных изображений (БВТИ) 16 восстанавливается трехмерное изображение внутренней структуры объекта 1 по его теневым проекциям. После этого блоком дефектоскопии 15 определяются несплошности (дефекты-трещины, включения мусора и т.п. [4]). Затем блок формирования цветных псевдоизображений (БФЦП) 17, используя информацию от БВТИ 16, представляет на экране монитора 19 псевдоцветное изображение. Результаты работы устройства передаются от блока дефектоскопии 15 и БФЦП 17 в систему Интернет через блок связи с Интернетом 18.
Все перечисленные блоки устройства, включая объект 1, располагаются в защитном корпусе от рентгеновского излучения (ЗКРИ)
11. который, во-первых, обеспечивает изоляцию окружающей среды от рентгеновского излучения, во-вторых, осуществляет нормальную температуру внутри корпуса 11 путем регулирования температуры блоком регулирования температуры (БРТ) 13, в-третьих, исключения вибрации от окружающей среды с помощью адаптивного блока виброизоляции (АБИ)
12. Управление АБИ 12 и БРТ 13 производится от ЭВМ 7 через интерфейс 14.
Блок нейросетевого метрологического обеспечения (БНМО) 20 осуществляет метрологическую проверку устройства в эталонном (предварительном) и рабочем состоянии.
Блок лазерного оптико-телевизионного метрологического обеспечения (БЛОТМО) 21 обеспечивает метрологическую проверку устройства (контроль размещения объекта 1 в рабочей зоне 9), при этом используется принцип триангуляции для контроля местоположения объекта 1 [5]. Связь БЛОТМО 21 с ЭВМ 7 производится с помощью интерфейса 22.
Электропитание блоков устройства осуществляется управляемым источником питания (УИП) 23, который содержит аккумулятор, блок солнечной батареи и блок питания от сети 220 вольт (50 герц).
На этом один цикл работы устройства заканчивается.
На фиг.2 показана система координат XOYZ, связанная с рабочей зоной. Здесь представлен объект 1 и показаны его развороты и смещения: Δx, Δy, Δz - координаты объекта; ΔxC, ΔyC, ΔzC - смещение объекта по соответствующим осям; α, β, γ - углы поворота объекта по соответствующим осям.
На фиг.3 представлен общий вид блока электромеханики, управляемой рабочей зоны и блока адаптивного структурно-перестраиваемого управления рентгеновского микротомографа; на фиг. 4 - кинематическая схема устройства; на фиг. 5 - вид А на разрез устройства. Изделия представленные на фиг. 3 - фиг. 5 содержат следующие элементы:
24 - микропроцессорный блок адаптивного структурно-перестраиваемого управления и электронная часть блока электромеханики;
25, 26 - платформы;
27 - рабочий стол;
28, 29 - каретки;
30, 31 - направляющие;
32 - корпус;
33, 34 - магнитопровод-ротор (модуль движения по горизонтальной оси);
35, 36 - индукторы;
37 - шлицевая втулка;
38 - магнитопровод-ротор (модуль движения по вертикальной оси);
39 - шлицевая втулка;
40 - магнитопровод-ротор;
41, 42- индукторы;
43-46 - оптические датчики положения;
47-50 - приемники сигналов.
Изделие (фиг. 3) содержит микропроцессорный блок адаптивного структурно-перестраиваемого управления 24, платформы крепления 25 и 26 источника и приемника рентгеновского излучения, соответственно;
рабочий стол 27 для установки исследуемых образцов. Платформы 25 и 26 смонтированы на отдельных, подвижных вдаль горизонтальной оси X, каретках 28 и 29, смонтированных подвижно на направляющих 30 и 31, установленных на корпусе 32. К каждой платформе прикреплен неподвижно магнитопровод-ротор 33 и 34 соответствующего линейного электромехатронного модуля движения по горизонтальной оси X. Индукторы 35 и 36 смонтированы неподвижно на корпусе 32, а рабочий стол 27 смонтирован на подвижной вдоль вертикальной оси внутренней части 37 шлицевой втулки (фиг. 5) и прикреплен неподвижно к магнитопровод-ротору 38 линейного электромехатронного модуля движения вертикальной оси Z. Внешняя часть 39 шлицевой втулки смонтирована на вращающемся магнитопровод-роторе 40 сегментного электромехатронного модуля движения, индукторы 41 и 42 которых, соответственно, смонтированы неподвижно на корпусе 32. Линейные и сегментные электромехатронные модули движения содержат оптические датчики положения с движущейся частью 43, 44, 45 и 46, расположенными, соответственно, на магнитопровод-роторах 33, 34, 38, и 40, с приемниками сигналов 47, 48, 49 и 50, соответственно, используемые блоком 24 для организации обратной связи системы управления (фиг. 3).
В процессе функционирования, блок 24 подает сигналы управления на индукторы 35 и 36 линейных электромехатронных модулей движения для выставки в необходимое положение вдоль оси Х рентгенооптического тракта источника и приемника рентгеновского излучения для получения четких рентгеновских изображений. После выставки источника и приемника, необходимо перемещать и вращать рабочий стол 27 с исследуемыми образцами вдоль и вокруг оси Z, что осуществляется подачей микропроцессорным блоком 24 сигналов управления на индукторы 41 и 42, соответственно линейного и сегментного электромехатронных модулей движения. Сигналы о положении при перемещении платформ 25 и 26 источника и приемника, соответственно, рабочего стола 27, от приемников сигналов датчиков положения 47, 48, 49 и 50, используются микропроцессорным блоком 24 в обратной связи линейных и сегментного электромехатронных модулей движения, что обеспечивает повышение точности перемещения. Кинематическая схема блоков 2, 3, 8, 9, 10 представлена на фиг. 4.
Рассмотрим вариант исполнения блока адаптивного структурно-перестраиваемого управления 10, представленного на фиг.6, который содержит следующие блоки:
51 - блок коммутируемых коэффициентов;
52 - измерительное устройство;
53 - блок формирования функции переключения;
54 - исполнительное устройство.
Значительные дополнительные возможности улучшения процессов регулирования дает нелинейное управление работой объекта путем изменения структуры управляющего устройства в зависимости от размеров и знаков входных величин, поступающих в управляющее устройство от измерительного устройства. Могут использоваться комбинации линейных законов регулирования (их достоинства, обходя недостатки). Например, если известно, что при одном законе регулирования получается быстрое начальное изменение регулируемой величины, но с большим перерегулированием, а при другом - медленное изменение, но плавный подход к новому установившемуся режиму, то можно, включив сначала первый закон, переключить затем систему на второй закон в некоторой точке А, когда отклонение y достигнет определенного значения yА. В результате процесс регулирования приобретет форму кривой (фиг. 7), объединяющей оба качества - быстроту и плавность процесса. Используя данный подход, получаем процесс регулирования без характерных для пропорционально-интегральных (ПИ) и пропорционально-интегральных дифференциальных (ПИД) регуляторов колебаний и перерегулирования при малом времени регулирования.
Подобные системы относятся к классу нелинейных, даже если все звенья системы линейны. Происходит это за счет того, что в процессе работы происходят автоматические переключения между звеньями. Такую работу можно сравнить с тем, как получается нелинейная статическая характеристика из отрезков прямых линий. Но в данном случае имеет место нелинейная динамическая характеристика, составляемая из последовательности разных линейных дифференциальных уравнений, соответствующих первому и второму законам регулирования. Синтез структуры системы осуществлялся исходя из предположения, что совокупность функциональных элементов и характер связей между ними остаются раз и навсегда неизменными. Но такой взгляд на проектирование систем управления, вообще говоря, не является единственным. При построении управляющего устройства можно заранее ввести в структуру системы такие функциональные элементы, которые во время протекания процесса управления скачкообразно меняют знак обратной связи, коэффициенты воздействия по различным координатам и т.д., т.е. изменяют структуру системы. Следовательно, в зависимости от выбранного алгоритма и имеющейся информации управляющая система будет обладать той или иной структурой. В такой системе удастся совмещать полезные свойства каждой из имеющейся совокупности структур и получить какие-либо новые свойства, не присущие любой из них. Такой подход позволяет существенно повысить качество управления.
На фиг. 6. представлена обобщенная схема автоматического регулирования с переменной структурой блока адаптивного структурно-перестраиваемого управления. В нее входит блок измерения, или измерительное устройство (ИзУ) 52, которое производит непрерывную оценку регулируемой величины и вычисляет величину сигнала рассогласования, который подается на блок формирователя функции переключения 53, осуществляющий анализ и переключение сигнала отклонения регулируемой величины ε(t) на необходимый закон регулирования (блок коммутируемых коэффициентов 51).
Одна из проблем, с которыми сталкиваются рентгеновские микротомографы, связана с различными видами искажений, которые фиксируются на захватываемом изображении, главным образом из-за неоднородности рентгеновского пучка и неисправностей оптически-электронной системы. Двумерный рентгеновский детектор, предназначенный для регистрации рентгеновских изображений, устроен на базе матрицы, включающей в себя m кристаллов, чувствительных к гамма-лучам. Вследствие шума измерения, несовершенства линейного функционирования кристаллов, возможных краевых эффектов, неоднородной чувствительности элементов, выходное изображение характеризуется неравномерной яркостью по полю и похоже на геометрически искаженную квадратную сетку, при этом дисторсионное искажение усиливается по мере удаления от центра (фиг. 8).
Поэтому встает вопрос о необходимости соответствующей калибровки. По существу, калибровка стремится связать каждый пиксел изображения, произведенного рентгеновским детектором на базе кристаллической матрицы, с кристаллом, влияющим на этот пиксел. Процесс калибровки производится на изображении, получаемых путем освещения детектора однородным пучком гамма-лучей на время, достаточное, чтобы получить изображение с высоким разрешением. Уровень интенсивности получаемого изображения пропорционален числу гамма-лучей, которые поражают соответствующий кристалл, поэтому идентификация области влияния каждого кристалла может быть получена поиском пиков интенсивностей по изображению.
В литературе описаны способы автоматизированной калибровки рентгеновских микротомографов, например, метод калибровки, основанный на преобразовании водораздела в [6]), но они обычно рассчитаны на интерактивное исправление результатов пользователем и не учитывают ситуации, когда один и тот же пиксел с разными уровнями принадлежности (вероятности, возможности) может принадлежать сразу нескольким классам (кристаллам).
Предлагается основанная на нейросетевых технологиях методика для автоматической калибровки рентгеновского микротомографа, не требующая вмешательства пользователя. Для повышения точности калибровки используем адаптивные нечеткие кластеризующие сети Кохонена [7, 8], при этом вводим новое понятие окрестности и дополнительный специфичный этап обучения.
Структурная схема блока нейросетевого метрологического обеспечения (архитектура адаптивной нечеткой кластеризующей сети Кохонена (АНКСК)) приведена на фиг. 9 и содержит два слоя: слой Кохонена, в котором определяются центры пиков интенсивностей изображения, и слой вычисления принадлежностей. Следует отметить, что выходной слой подключается к уже обученной нейронной сети Кохонена и используется непосредственно в обработке входных пикселов. Таким образом, АНКСК может работать в режиме как четкой, так и нечеткой кластеризации - в зависимости от характера обрабатываемых данных.
Структурная схема блока нейросетевого метрологического обеспечения (БНМО) 20, приведенная на фиг. 9, содержит следующие элементы:
54 - блок связи с ЭВМ;
55 -дополнительный интерфейс;
56, 57, 58 - номера элементов изображения в обучающей выборке (входные нейроны слоя Кохонена);
59, 60, 61 - выходные нейроны слоя Кохонена.
Наборы входных пикселов x(k)=(X1(k),…, Xn(k)), (здесь k=1,…, N имеет смысл номера изображения в обучающей выборке) с рецепторного (нулевого) слоя последовательно подаются на нейроны слоя Кохонена Nj, имеющего топологию кристаллической решетки. Настраиваемые синаптические веса Cji(k), j=1,…, m; i-=1,…, n определяют центроиды m пересекающихся кластеров Cj(k)=(cjl(k),…, Cji(k),…, cjn(k)), соответствующие m "лучшим" пикам интенсивности по изображению, где m - количество кристаллов на матрице детектора.
При отсутствии четко выраженной границы между соседними кластерами использование нечеткой кластеризации представляется более предпочтительным. Поэтому, добавив к слою Кохонена выходной слой нечеткой кластеризации, нейроны которого Nj вычисляют уровни принадлежности u(k)=(ul(k),…, Un(k)) текущего пиксела к j-му кластеру (кристаллу), и отключив латеральные связи в слое Кохонена (на фиг. 10 показаны пунктиром), получим архитектуру АНКСК.
Рассмотрим, применительно к задаче нахождения пиков интенсивностей изображения, оба режима работы АНКСК.
В самоорганизующихся картах Кохонена нейроны на входных векторах учатся их распределению и топологии. Первоначально нейроны занимают свое физическое положение на двумерной решетке согласно определенной топологии, которая фиксирует, какие из нейронов являются соседями нейрона-победителя (фиг. 10).
Функция окрестности может принимать различные формы, такие как квадрат или шестиугольник. Во время обучения и нейрон-победитель, и все нейроны в пределах указанной окрестности обновляются по правилу Кохонена, которое изменяет веса таких нейронов ближе к входному вектору:

где а(k)∈(0,1) - изменяющийся во времени коэффициент усиления, называемый скоростью обучения (обычно выбирают α=1 на первой итерации, постепенно уменьшая в процессе обучения до нуля);
fij(k) - монотонно убывающая функция расстояния ("соседства") между i-м и j-м нейронами с местоположениями ri и rj соответственно:

где ri и rj - векторы, определяющие положение нейронов i и j в решетке.
При принятой метрике d=||ri-rj|| функция fij(k) с ростом времени k стремится к нулю. На практике вместо параметра времени k используют параметр расстояния σ, задающий величину области «соседства» и уменьшающийся с течением времени до нуля. Выбор функции fij(k) также влияет на величины весов всех нейронов в слое. Очевидно, что для нейрона-победителя с:

Можно отметить два последовательных и различных этапа обучения. Первый этап обучения - этап упорядочения, который наносит на карту векторы весов так, чтобы произвольным образом представить поверхность распределения во входном пространстве: цель состоит в том, чтобы аппроксимировать форму изображения, предварительно обработанную функциями фильтрации. Карта весов, первоначально характеризуемая однородным распределением, в конце этапа упорядочения деформируется вследствие различий в уровнях интенсивности пикселов.
Заключительный этап обучения - этап точной настройки, во время которого окрестность каждого нейрона включает только самого себя:
практически, каждый входной вектор вызывает обновление только весов нейрона-победителя, при этом используется медленное уменьшение скорости обучения, без изменения упорядоченной структуры сетки, достигнутой на предыдущем этапе.
Поскольку задача состоит в восстановлении структуры сетки матрицы кристаллов, мы должны определять центры кластеров и соединять эти центры согласно фиксированной топологии карты Кохонена. Нейроны в обученной карте должны располагаться в довольно однородном пространстве, последовательно, с геометрическими искажениями, существующими по выходному изображению и независимо от различия в уровнях интенсивности, связанных с пиками.
Для этого в процесс обучения мы вводим промежуточный этап, который назовем этапом упорядочения сетки - между традиционным этапом упорядочения и этапом настройки. Во время этого этапа процедура обучения будет пытаться на входных векторах строить сетку нейронов таким образом, чтобы в большой степени учитывалась информация, которая отражает ожидаемую структуру сети. Основная идея состоит в том, что вводится более специфичное понятие окрестности, которая принимает во внимание геометрическую природу нейронной сети, и соответственно обновление весов нейрона-победителя и нейронов происходит в пределах определенного расстояния от нейрона-победителя, но на том же самом ряду (координата X) или на той же самой колонке (координата Y) сетки как и победитель. Этот выбор будет давать более высокий вес такой топологии сетки, которая первоначально связалась бы с центрами пиков интенсивности излучения (фиг. 11).
В классе процедур нечеткой кластеризации наиболее строгими с математической точки зрения являются алгоритмы, основанные на целевых функциях [6] и решающие задачу их оптимизации при тех или иных априорных предположениях. Наиболее распространенным здесь является вероятностный подход, основанный на минимизации критерия (целевой функции):

при ограничениях:

где uj(k)∈[0,1], β - неотрицательный параметр фаззикации (фаззификатор), определяющий размытость границ между кластерами, k=1,…,N. Результатом кластеризации является (N×m) - матрица U={uj(k)}, называемая матрицей нечеткого разбиения. Поскольку элементы матрицы U могут рассматриваться как вероятности гипотез принадлежности векторов данных определенным кластерам, то процедуры, порождаемые минимизацией (4) при ограничениях (5), (6), называются вероятностными алгоритмами нечеткой кластеризации. Вводя функцию Лагранжа:

где λ(k) - неопределенный множитель Лагранжа, и решая систему уравнений Каруша - Куна - Таккера, несложно получить искомое решение в виде:

совпадающее при β=2 с алгоритмом нечетких С - средних Бездека:
Использование процедур (8), (9) подразумевает, что вся выборка, подлежащая кластеризации и содержащая N наблюдений, задана заранее и не может изменяться в процессе обработки.
Таким образом, для создания нейросетевой системы калибровки изображения, регистрируемого двумерным рентгеновским детектором микротомографа, должны быть определены на выходном изображении пиксельные кластеры влияния каждого кристалла, для чего требуется найти центры пиков интенсивности рентгеновского излучения и соединить их согласно топологии обученной нейронной сети Кохонена. Для повышения точности калибровки для каждого пиксела рассчитывается степень принадлежности к соответствующему кристаллу [9].
Описанный метод позволяет эффективно решать сложные задачи обработки информации, когда классы, подлежащие разделению, имеют произвольную форму и пересекаются между собой, отличается высокой точностью и эффективностью для решения задач кластеризации данных в условиях неопределенности, в том числе на границах изображения, низким временем обучения, надежностью против шума, пространственных искажений и большой изменчивости в степенях интенсивности пикселов. Метод полностью автоматизирован и не требует интерактивного вмешательства пользователя.
Описанная АНКСК относится к новому классу гибридных систем вычислительного интеллекта и функционирует на основе принципов, существенно отличающихся от методов обработки данных в традиционных искусственных нейронных сетях и лежащих в основе биологических нейросистем живых организмов.
Структурная схема блока восстановления трехмерных изображений дана на фиг.12, которая содержит систему захвата теневых проекций 62 и блок создания 3D-реконструкций 63.
В процессе съемки образец поворачивается на 180 или 360 градусов с фиксированным шагом. Для каждого микровращения фиксируется теневое (трансмиссионное) изображение образца. Система сохраняет все эти проекции как 16 битные tiff-файлы. Массив данных после сканирования представляет собой набор нормальных трансмиссионных рентгеновских снимков. Количество файлов в массиве зависит от размера шага и величины выбранного полного угла поворота. Например, для угла поворота 180° с шагом 0,9° массив данных будет содержать 200 изображений плюс небольшое число, используемое для трансформации изображений для компенсации верности рентгеновского пучка.
После завершения съемки образца следует реконструкция его изображения. Полученные 16 битные теневые tiff-изображения используются для реконструкции виртуальных сечений объекта. Далее, с использованием алгоритма реконструкции, генерируется предварительный массив сечений. Эти данные еще не являются изображениями, это -матрица, содержащая значения поглощения в реконструируемом сечении.
Размер матрицы подобен количеству пикселей внутри сечения или линия ПЗС матицы (n-количество пикселей в линии теневого изображения или ПЗС-матрицы). Теперь мы можем сохранить реконструированное сечение как матрицу с плавающей точкой, содержащую значения величин затухания после реконструкции.
По завершению предварительного массива сечений на его основе создается SD-изображение исследуемого образца.
На фиг. 13 представлена структурная схема блока дефектоскопии, которая содержит следующие изделия:
64 - интерфейс (вывод информации о дефектах в файл);
65 - блок анализа 3D-реконструкции методом пространственной области (БА3DРМПО);
66 - блок анализа 3D-реконструкции градиентным методом (БА3DРГМ);
67 - блок анализа 3D-peконструкции корреляционными методами (БA3DPKM);
68 - блок анализа 3D-реконструкции методами нейронных сетей (БА3DРМНС);
69 - блок обозначения дефектов на 3D-реконструкции;
70 - блок управления (запрос пользователя на поиск и анализ дефектов) (БУ).
Используя различные методы поиска дефектов, блок 16 определяет физические и геометрические характеристики неоднородностей исследуемого образца по изображению 3D-реконструкции, получаемого от блока восстановления. Модуль выполняет следующие операции:
a) определение местоположения и геометрических параметров трещин;
b) определение местоположения и геометрических параметров микротрещин;
c) определение местоположения и геометрических параметров примесей;
d) определение местоположения и геометрических параметров пустот;
e) определение местоположения и гeoмeтpичecкиx параметров плacтичныx деформации;
f) определение местоположения и геометрических параметров внутренних напряжений;
Эти задачи реализованы с помощью следующих блоков:
1) Блок анализа 3D-реконструкции методом пространственной области.
К пространственной области относится совокупность пикселов, составляющих изображение. Методы пространственной области оперируют непосредственно с этими пикселами. Функции предварительной обработки в пространственной области записываются в виде

где f(x,y) - входное изображение; g(x,y) - выходное (обработанное) изображение; h - оператор функции f, определенный в некоторой области точки (х,y). Оператор h можно применять также к ряду входных изображений для формирования, например, суммы пикселов К изображений при уменьшении шума.
Основным подходом при определении окрестности точки (x,y) является использование квадратной или прямоугольной области части изображения с центром в точке (x,y) (фиг. 14).
Центр этой части изображения перемещается от пиксела к пикселу, начиная, например, от левого верхнего угла; при этом для получения g(x,y) оператор применяется для каждого положения (x,y). Хотя иногда используются и другие формы окрестности (например, круг), квадратные формы более предпочтительны из-за простоты их реализации.
Простейшая форма h получается, когда окрестность имеет размерность 1×1 и, следовательно, g зависит только от значения f в точке (x,y). В этом случае h становится картой интенсивности или преобразованием T вида
где для простоты введены переменные s и r, обозначающие соответственно интенсивность f(x,y) и g(x,y) в любой точке (x,y).
Один из наиболее часто встречающихся методов пространственной области основан на использовании так называемых масок свертки (или шаблонов, окон или фильтров). Обычно маска представляет собой небольшую (например, размерность 3×3) двумерную систему (см. фиг. 15), коэффициенты которой выбираются таким образом, чтобы обнаружить заданное свойство изображения. Предположим для начала, что дано изображение с постоянной интенсивностью, которое содержит отдельные удаленные друг от друга пикселы с отличной от фона интенсивностью. Эти точки могут быть обнаружены маской, показанной на фиг. 15.
Процесс заключается в следующем. Центр маски (помеченный цифрой 8) перемещается по изображению определенным образом. При совпадении центра маски с положением каждого пиксела производится умножение значений всех пикселов, находящихся под маской, на соответствующий коэффициент на маске, т.е. значение пиксела под центром маски умножается на 8, а значения восьми соседних пикселов умножаются на -1. Затем результаты этих девяти умножений суммируются. Если все пикселы под маской имеют одинаковые значения (постоянный фон), то сумма будет равна нулю. Если же центр маски разместится над точкой с другой интенсивностью, сумма будет отлична от нуля. В случае размещения указанной точки вне центра сумма также будет отлична от нуля, но на меньшую величину. Это различие может быть устранено путем сравнения значения суммы с пороговым значением.
Если величины w1, w2,…, w9 представляют собой коэффициенты маски пиксела (x,y) и его восьми соседей (рис.16), предыдущее рассмотрение можно представить как выполнение следующей операции:

на окрестности размерностью 3×3 точки (х,y).
Необходимо отметить, что использование окрестности не ограничивается областями размерностью 3×3 и случаями, которые будут приведены в дальнейшем.
2) Блок анализа 3D-реконструкции градиентным методом.
Исходными данными для метода градиентного анализа является массив значений плотностей в каждой точке образца, на основе которых
определяется функция распределения плотности материала p(x,y,z), после чего строится градиентное поле образца. Дефекты будут определяться неоднородностями этого поля, то есть наличием градиентов плотности

По объемному расположению этих градиентов можно определить размеры и характер дефектов.
Преимущества данного метода:
- возможность определения типа дефекта;
- возможность определения локализации дефекта;
- возможность определения геометрических и физических характеристик дефекта.
Градиент изображения f(x,y) определяется в точке (x,y) как двумерный вектор
Из векторного анализа известно, что вектор G указывает направление максимального изменения функции f в точке (x,y). Однако при определении дефектов представляет интерес модуль этого вектора, называемого обычно градиентом и обозначаемого как G[f(x,y)], где

На практике, как правило, градиент аппроксимируется абсолютными значениями

Эта аппроксимация значительно упрощает реализацию метода. Вычисление градиента основано на нахождении первых производных 



Несколько более сложный способ включает точки в окрестности размерностью 3×3 с центром в точке (x,y):


где буквы от а до i обозначают соседние точки центра (x,y). Окрестность размерностью 3×3 точки (x,y) в упрощенной записи показана на рисунке 1а. Отметим, что ближайшие к точке (x,y) точки в данном варианте определения производных цифрового изображения имеют значение, равное 2. Вычисление градиента в области размерностью 3×3 имеет преимущество по сравнению с использованием уравнений (19) и (20) в смысле большего усреднения, что делает градиент менее чувствительным к помехам. В принципе возможно применение и более широких окрестностей для нахождения градиента.
Значение Gx по уравнению (20) можно определить с помощью маски (рисунок 2 - Маски для вычисления GxGy (а и б).tif). Аналогично находится и значение Gy. Эти две маски обычно называются операторами Собеля. Использование данных масок в произвольной точке (x,y) сочетает в себе результат применения уравнений в виде аппроксимации градиента в этой точке. Перемещая маски по изображению f(x,y), получают градиенты во всех его точках.
3) Блок анализа 3D-реконструкции корреляционными методами
Суть метода состоит в том, что исследуемое изображение (ИИ) сравнивается с эталонной идеальной картиной (ЭИ).
При использовании модифицированного корреляционного алгоритма признаком нахождения фрагмента эталонного изображения в области поиска является максимум коэффициента корреляции:
где j - номер строки; i - номер пиксела в строке; Y1, Y2 - значения яркостей пикселов; n - размер фрагмента; m1, m2 - математические ожидания.
Сканирование проводится построчно с интервалом в один пиксел. В разностном алгоритме признаком нахождения фрагмента эталонного изображения в области поиска является минимум функции:
При использовании разностного быстрого алгоритма признаком нахождения фрагмента эталонного изображения в области поиска является минимум функции:
Выбор определяется требованиями, предъявляемыми к системе. Например, применение первого алгоритма обеспечивает высокие точностные характеристики (при невысоком быстродействии) за счет улучшения параметров корреляционной функции. Использование второго алгоритма повышает быстродействие за счет значительного сокращения вычислительных операций. Сравнивая участки ИИ и ЭИ, можно определить смещение элементарных площадок ИИ относительно ЭИ и построить карту векторов смещений, на которой стрелками отмечаются направление и величина смещения площадок (точка соответствует нулевому смещению).
4) Блок анализа 3D-реконструкции методами нейронных сетей.
Для поиска и локализации дефектов также могут использоваться нейронные сети. Существует множество моделей построения нейронных сетей, обучаемость и способность к распознаванию объектов различной структуры которых достаточно высоки.
На эталонных изображениях происходит обучение нейронной сети выявлению различных дефектов. Для увеличения точности и скорости работы можно распределить задачи между несколькими более простыми нейронными сетями. Например, для поиска каждого дефекта используется соответствующая только ему нейронная сеть.
Основными достоинствами данного метода является достаточно высокая точность и способность к обучению, а значит, к дальнейшему повышению точности работы.
К недостаткам данного метода относятся высокая продолжительность времени обучения и ресурсоемкость программного обеспечения, использующего нейросетевые методы.
2. Модуль отображения и классификации дефектов и напряжений на 3D-реконструкции, который выполняет следующие задачи;
a) отображение на 3D-реконструкции трещин и микротрещин с указанием геометрической протяженности и ширины трещины;
b) отображение на 3D-реконструкции примесей с указанием физических и геометрических характеристик;
c) отображение на 3D-реконструкции пустот с указанием геометрических характеристик;
d) отображение на 3D-реконструкции пластичных деформаций с указанием типов деформаций и геометрических характеристик;
e) отображение на 3D-реконструкции внутренних напряжений с указанием степени, направления и геометрических характеристик;
Каждый дефект отображается на 3D-реконструкции специализированными графическими 3D-вставками или пометками. Состав и структура вставок следующая:
a) габаритный контейнер дефекта - область 3D-реконструкции, соответствующая предполагаемому дефекту заключается прозрачный параллелепипед (на изображении присутствуют лишь ребра);
b) комментарий к габаритному контейнеру - текстовые записи, характеризующие тип и геометрию дефекта;
4) модуль формирования отчетов и статистики, выполняющий следующие задачи:
a) формирование отчета о внутренних дефектах образца (список дефектов, их характеристики и локализации);
b) формирование количественных и качественных статистических данных о дефектах (объемная доля, процентное соотношение, средние геометрические размеры и области локализации, и т.д.).
Структурная схема блока формирования цветных псевдоизображений показана на фиг.17.
На этапе построения 3D-изображения выбираются минимальный и максимальный уровни яркости изображения и выбранный диапазон нормализуется. Все значения, лежащие в этом промежутке, отображаются как цвета из выбранной виртуальной цветовой палитры.
Для информативности необходимо провести сопоставление выбранной цветовой палитры значениям плотности рассеяния рентгеновских лучей. В обычном изображении все значения затухания меньше минимального будут белыми, а больше максимального - черными.
Реконструированный массив данных показывается как сечение образца выполненное в выбранной палитры.
По сравнению с известными, предлагаемые способ и устройство имеют лучшие характеристики:
1) высокими точностными характеристиками за счет прецезионного перемещения объекта при сканировании относительно блока рентгеновского излучения и блока детекторов путем введения адаптивного управления перемещением рабочей зоны;
2) высокими точностными характеристиками за счет восстановления и анализа трехмерных изображений внутренней структуры объекта;
3) расширения функциональных возможностей путем оценки широкого класса дефектов объекта;
4) расширения функциональных возможностей за счет связи устройства с системой Интернет;
5) удобства работы за счет представления информации на экране монитора;
6) обеспечения безопасности использования за счет применения защитного корпуса от рентгеновского излучения;
7) регулирования температуры внутреннего пространства, ограниченного корпусом;
8) обеспечения управлением виброизоляцией;
9) введения автоматической метрологической поверки.
Таким образом, по сравнению с известными, предлагаемые способ и устройство обладают повышенной точностью восстановления трехмерной структуры объекта, расширенными функциональными возможностями, улучшенными удобствами работы и исключения опасного рентгеновского излучения для обслуживающего персонала.
Источники информации:
1. Лиев А.Х. Сканирующее рентгеновское устройство. Патент RU 94023023 (А1).
2. Johnson Roger H., Nelson Alan. United States Patent 5,402,460. Three-dimensional microtomographic analysis system.
3. Малинова П.И. и др. Рентгеновский компьютерный томограф. Заявка на патент RU 2004101619 (А1).
4. Бубенчиков М.А., Газиева Е.Э., Гафуров А.О., Глушков Г.С., Жданов Д.С., Саньков Д.В., Сырямкин В.И., Шидловский С.В., Юрченко А.В. Современные методы исследования материалов и нанотехнологий. - Томск: Изд-во Том. ун-та, 2010. - 366 с.
5. Писаревский А.Н. Системы технического зрения (принципиальнее основы, аппаратное и математическое обеспечение). - Л: Машиностроение. 1988. - 424 с.
6. Круглов В. Искусственные нейронные сети. Теория и практика. - М.: Горячая линия - Телеком, 2001. - 318 с.
7. Gorshkov Ye. New recursive learning algorithms for fuzzy Kohonen clustering network / Gorshkov Ye, Kolodyazniy V., Bodyanskiy Ye. // Proc. 17th Int. Work-shop on Nonlinear Dynamics of Electronic Systems. - Rapperswil, Switzerland, 2009. - P. 58-61.
8. Pascual-Marqui, R.D. Smoothly distributed fuzzy c-means: a new self-organizing map. / Pascual-Marqui R.D., Pascual Montano A.D., Kochi K.., Carazo J.M. // Pattern Recognition. - 2001. - 34. - P.2395-2402.
9. Кохонен Т. Самоорганизующиеся карты. - М.: БИНОМ. Лаборатория знаний, 2008. - 655 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2745304C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| СПОСОБ ВИЗУАЛИЗАЦИИ 3D ПОРТРЕТА ЧЕЛОВЕКА С ИЗМЕНЕННЫМ ОСВЕЩЕНИЕМ И ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ НЕГО | 2021 |
|
RU2757563C1 |
| Способ детектирования малоразмерных дефектов на текстурированных материалах с неравномерной отражательной способностью | 2024 |
|
RU2840311C1 |
| УСТРОЙСТВО АНАЛИЗА БРОНХОФОНОГРАММ | 2013 |
|
RU2574713C2 |
| УСТРОЙСТВО ТРЕХМЕРНОГО СКАНИРОВАНИЯ СЦЕНЫ С НЕЛАМБЕРТОВЫМИ ЭФФЕКТАМИ ОСВЕЩЕНИЯ | 2014 |
|
RU2573767C1 |
| СПОСОБ И СИСТЕМА СВЕРХРАЗРЕШЕНИЯ С ПОМОЩЬЮ КОМБИНИРОВАННОЙ РАЗРЕЖЕННОЙ АППРОКСИМАЦИИ | 2016 |
|
RU2661537C2 |
| Устройство для восстановления карты глубины с поиском похожих блоков на основе нейронной сети | 2019 |
|
RU2716311C1 |
| СИСТЕМА ДЛЯ ГЕНЕРАЦИИ ВИДЕО С РЕКОНСТРУИРОВАННОЙ ФОТОРЕАЛИСТИЧНОЙ 3D-МОДЕЛЬЮ ЧЕЛОВЕКА, СПОСОБЫ НАСТРОЙКИ И РАБОТЫ ДАННОЙ СИСТЕМЫ | 2024 |
|
RU2834188C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |



Использование: для рентгеновской томографии. Сущность способа: заключается в том, что облучают и воспринимают массив изображения энергетического спектра рентгеновского излучения, проходящего через объект, при этом восстанавливают изображения по теневым проекциям объекта, затем формируют, сравнивают и анализируют текущие и эталонные интегральные характеристики изображения объекта, определяют дефекты объекта и отображают результаты анализа объекта. Способ отличается тем, что восстановление трехмерного изображения осуществляют при вращении и смещении объекта по трем взаимно перпендикулярным осям системы координат, связанной с рабочей зоной объекта при корректировке управления последней, а текущие и эталонные интегральные характеристики изображения объекта формируют в виде спектральных и фрактальных признаков. Технический результат: повышение точности оценки внутренней структуры объекта, быстродействия, расширение функциональных возможностей (расширение класса диагностируемых объектов) и снижение опасности применения для обслуживающего персонала из-за значительного рентгеновского облучения. 2 н. и 14 з.п. ф-лы, 17 ил.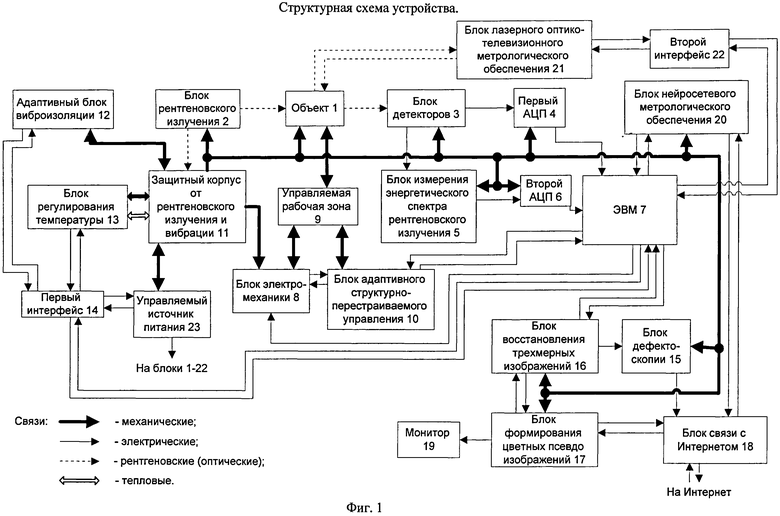
1. Способ рентгеновской томографии, заключающийся в том, что облучают и воспринимают массив изображения энергетического спектра рентгеновского излучения, проходящего через объект, при этом восстанавливают изображения по теневым проекциям объекта, затем формируют, сравнивают и анализируют текущие и эталонные интегральные характеристики изображения объекта, определяют дефекты объекта и отображают результаты анализа объекта, отличающийся тем, что восстановление трехмерного изображения осуществляют при вращении и смещении объекта по трем взаимно перпендикулярным осям системы координат, связанной с рабочей зоной объекта при корректировке управления последней, а текущие и эталонные интегральные характеристики изображения объекта формируют в виде спектральных и фрактальных признаков.
2. Способ по п.1, отличающийся тем, что геометрические признаки локальных и интегральных участков изображений объекта определяют в виде периметров, площадей, радиусов, длины, ширины, количества точек перегиба контура, геометрических центров элементов изображений.
3. Способ по п.1, отличающийся тем, что формируют псевдоцветные изображения внутренней микроструктуры объекта.
4. Способ по п.1, отличающийся тем, что уменьшают до безопасного уровня рентгеновское излучение и вибрацию.
5. Устройство рентгеновской томографии, содержащее последовательно соединенные блок рентгеновского излучения, объект, блок детекторов, первый аналого-цифровой преобразователь и электронно-вычислительную машину, к второму входу которой подключен второй аналого-цифровой преобразователь, входом соединенный через блок измерения энергетического спектра рентгеновского излучения с вторым выходом блока детектора, а выход электронно-вычислительной машины подключен к блоку электромеханики, отличающееся тем, что оно дополнительно содержит, во-первых, последовательно соединенные двунаправленными линиями, введенными между дополнительными выходами и входами электронно-вычислительной машины, блок восстановления трехмерных изображений, блок формирования цветных псевдоизображений, блок связи с Интернетом, отдельным входом подключенный через блок дефектоскопии к отдельному выходу блока восстановления трехмерных изображений, и блок нейросетевого метрологического обеспечения, во-вторых, содержит управляемую рабочую зону, введенную между выходами и входами объекта и блока электромеханики, отдельными двунаправленными линиями, подключенными через блок адаптивного структурно-перестраиваемого управления, соединенный отдельной двунаправленной связью с управляемой рабочей зоной, к электронно-вычислительной машине, в-третьих, между дополнительными выходом и входом объекта и входами и выходами электронно-вычислительной машины включены блок лазерного оптико-телевизионного метрологического обеспечения и второй интерфейс, соединенные между собой двунаправленными линиями, в-четвертых, содержит защитный корпус от рентгеновского излучения и вибрации, отдельным выходом подключенный к второму выходу блока рентгеновского излучения, а первым выходом подключенный к отдельным входам блока рентгеновского излучения, объекта, блока электромеханики, блока детекторов, блока измерения энергетического спектра рентгеновского излучения, первого аналого-цифрового преобразователя, второго аналогово-цифрового преобразователя, блока нейросетевого метрологического обеспечения, блока дефектоскопии, блока восстановления трехмерных изображений и блока формирования цветных псевдоизображений, а другими двунаправленными линиями соединенным с управляемым источником питания, блока регулирования температуры и адаптивного блока виброизоляции, подключенного отдельными двунаправленными линиями через интерфейс к электронно-вычислительной машине, причем, во-первых, блок регулирования температуры соединен двумя отдельными двунаправленными линиями с первым интерфейсом, а другой отдельной двунаправленной линией соединен с защитным корпусом от рентгеновского излучения и вибрации, во-вторых, управляемый источник питания соединен отдельными двунаправленными линиями с интерфейсом, а выходом - со всеми блоками устройства, в-третьих, блок формирования цветных псевдоизображений подключен к монитору.
6. Устройство по п.5, отличающееся тем, что управляемая рабочая зона выполнена в виде мехатронного модуля на основе магнитопроводов-роторов, имеющих возможность смещать исследуемый объект по трем взаимно перпендикулярным направлениям и разворачивать исследуемый объект вокруг трех взаимно перпендикулярных осей.
7. Устройство по п.5, отличающееся тем, что упомянутый блок адаптивного структурно-перестраиваемого управления выполнен в виде системы автоматического регулирования с переменной структурой.
8. Устройство по п.5, отличающееся тем, что упомянутый блок лазерного оптико-телевизионного метрологического обеспечения выполнен в виде триангуляционного измерителя положения исследуемого объекта.
9. Устройство по п.5, отличающееся тем, что упомянутый блок нейросетевого метрологического обеспечения выполнен в виде адаптивной схемы, содержащей обучаемый слой нейронов и выходной слой нейронов, обеспечивающих калибровку изображений при его четкой или нечеткой кластеризации.
10. Устройство по п.5, отличающееся тем, что упомянутый блок восстановления трехмерных изображений выполнен в виде последовательных схем захвата теневых проекций, реконструкции виртуальных сечений, создания предварительных сечений и построения 3D-изображения.
11. Устройство по п.5, отличающееся тем, что упомянутый блок дефектоскопии выполнен в виде последовательных схем реконструкции методом пространственной области, градиентным методом, корреляционным методом, методом нейронных сетей и схемы обозначения дефектов, управляемых по запросу пользователя на поиск и анализ дефектов.
12. Устройство по п.5, отличающееся тем, что упомянутый блок формирования цветных псевдоизображений выполнен в виде последовательности схем оценки плотностей слоев 3D-реконструкции, сопоставления псевдоцветов различным слоям 3D-реконструкции и формирования 3D-псевдореконструкции изображений.
13. Устройство по п.5, отличающееся тем, что упомянутый защитный корпус от рентгеновского излучения выполнен в виде экрана рентгеновского излучения на основе многослойного защитного материала.
14. Устройство по п.5, отличающееся тем, что упомянутый адаптивный блок виброизоляции выполнен в виде пружинно-механических демпферов.
15. Устройство по п.5, отличающееся тем, что упомянутый блок регулирования температуры выполнен в виде адаптивного регулятора температуры внутри корпуса томографа, содержащего воздушную принудительную вентиляцию и водяной отвод тепла.
16. Устройство по п.5, отличающееся тем, что упомянутый управляемый источник питания выполнен в виде бесперебойного источника питания, содержащего блок аккумуляторов, солнечную батарею и блок питания от электрической сети.
| US 2010278440 А1, 04.11.2010 | |||
| US 5119408А, 02.06.1992 | |||
| СПОСОБ РАСПОЗНАВАНИЯ ХИМИЧЕСКОГО СОСТАВА ОБЪЕКТОВ ПО ОСЛАБЛЕНИЮ ИМИ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ | 1999 |
|
RU2171980C2 |
| УСТРОЙСТВО для ТОМОГРАФИИIj^,^f;c?co.'>&^.,_. | 0 |
|
SU381343A1 |
| RU 2004101619 А, 10.07.2005 | |||
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО ИССЛЕДОВАНИЯ ПЛОТНОСТИ ТЕЛА | 1990 |
|
SU1811289A1 |
| Способ формирования изображений при компьютерной томографии головы | 1988 |
|
SU1581281A1 |

