Заявленное изобретение относится к способу определения местоположения вновь введенного в эксплуатацию прибора установки аварийной сигнализации, в которой приборы имеют изолятор и подключены через сигнальную линию к центральному пульту управления.
Под упомянутыми приборами в этой связи следует понимать, в частности, датчики аварийной сигнализации, такие как датчики противопожарной сигнализации или датчики газа, однако речь также может идти об исполнительных элементах, таких как оптические или акустические датчики тревожной сигнализации, реле, индикаторы тревожной сигнализации, передающие приборы для дальнейшей передачи тревожной сигнализации и т.п. Если в последующем описании речь идет о датчиках аварийной сигнализации, это не должно интерпретироваться в ограничительном смысле.
Если в электросети, расположенной на предприятии, вводится новый датчик, его местоположение в рамках топологии сети должно быть определено. Это может осуществляться таким образом, что определяют полную топологию, при этом осуществляют новый запуск всей сети, например, с помощью специальной команды на все датчики или путем беспроводного включения линии сигнализации. Датчики затем последовательно запускаются, при этом им присваивается однозначно определенный коммуникационный адрес. Подобные способы известны как определяемые термином «последовательная (цепная) синхронизация» или «шлейфовое (гирляндное) подключение» и применяются уже давно (см., например, ЕР-А-0042501).
В ЕР-А-0458878 описан способ определения конфигурации датчиков установки аварийной сигнализации, в которой центральный пульт управления перед присвоением коммуникационного адреса датчикам должен выполнить множество этапов, что требует относительно много времени. Определение местоположения вновь введенного датчика за счет нового запуска всей сети, в особенности в случае крупномасштабных сетей, требует больших временных затрат и является неэффективным.
В ЕР-А-0880117 описан способ для автоматической локализации датчиков тревожной сигнализации, при котором указанные датчики снабжены средствами связи с соседними датчиками. Для локализации конкретного датчика все датчики размыкают свои быстродействующие разъединители, и локализуемый датчик посылает соответствующее сообщение, которое принимается только соседними с ним датчиками. Затем быстродействующие разъединители замыкаются, и определяется, какие датчики являются этими соседними датчиками, что обеспечивает возможность однозначного определения положения локализуемого датчика. Этот способ является относительно быстродействующим, но требует оснащения датчиков упомянутыми средствами связи.
Посредством изобретения должен быть создан способ вышеназванного типа, который обеспечивает возможность быстрой и простой локализации вновь введенных в эксплуатацию приборов и не требует никакого дополнительного оснащения приборов.
Поставленная задача в соответствии с изобретением решается тем, что вновь введенные в эксплуатацию приборы опрашиваются несколько раз с одной стороны сигнальной линии, причем предварительно изолятор одного уже известного в топологии прибора размыкается и тем самым сигнальная линия делится на две ветви, и определяется, в какой из ветвей находится вновь введенный прибор, и выполнение этого способа продолжается до нахождения точного местоположения вновь введенного в эксплуатацию прибора.
Первый предпочтительный вариант осуществления соответствующего изобретению способа характеризуется тем, что сначала размыкается изолятор прибора, расположенного в максимальной степени ближе к середине сигнальной линии, и затем на основе достижимости вновь введенного в эксплуатацию прибора от выбранного конца сигнальной линии определяется, находится ли он в ветви перед или после прибора с разомкнутым изолятором.
Второй предпочтительный вариант осуществления соответствующего изобретению способа характеризуется тем, что затем только что разомкнутый изолятор замыкается, и размыкается изолятор прибора, расположенного в максимальной степени ближе к середине ветви сигнальной линии, содержащей вновь введенный в эксплуатацию прибор, и затем на основе достижимости вновь введенного в эксплуатацию прибора от выбранного конца сигнальной линии определяется, находится ли вновь введенный прибор перед или после прибора с разомкнутым изолятором.
Третий предпочтительный вариант осуществления соответствующего изобретению способа характеризуется тем, что описанный способ деления интервала пополам проводится до тех пор, пока не будет найдено точное местоположение вновь введенного в эксплуатацию прибора, что в случае установки аварийной сигнализации, содержащей n датчиков тревожной сигнализации, происходит, спустя (log1/n)(log1/2) этапов, с округлением до ближайшего натурального числа. Таким образом, для 30 датчиков это соответствует 5 этапам, а для 100 датчиков - 7 этапам, из которых каждый имеет длительность порядка одной секунды. Тем самым нахождение точного местоположения вновь введенного в эксплуатацию прибора требует лишь короткого времени порядка нескольких секунд без каких-либо дополнительных затрат.
Далее изобретение поясняется на примере выполнения со ссылками на чертежи, на которых показано следующее:
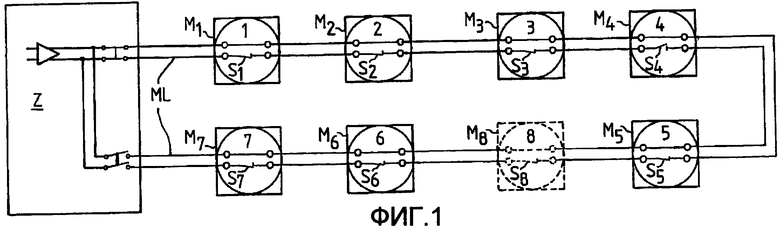
Фиг. 1 - схематичное представление установки аварийной сигнализации в состоянии, представляющем первый этап соответствующего изобретению способа;
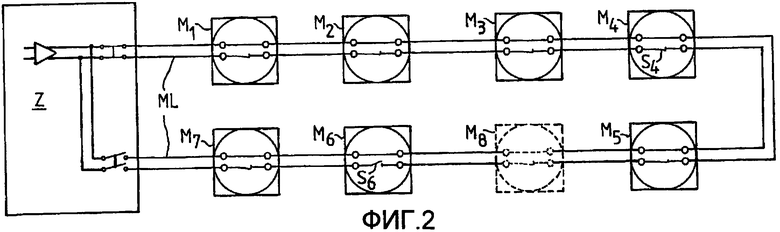
Фиг. 2 - установка аварийной сигнализации по фиг. 1 в состоянии, представляющем второй этап соответствующего изобретению способа.
На фиг. 1 и 2 представлена установка аварийной сигнализации, которая состоит из центрального пульта Z управления, исходящей из него кольцевой сигнальной линии ML и подключенных к сигнальной линии ML датчиков М1-М8 тревожной сигнализации. Пусть датчик М1 имеет коммуникационный адрес 1, датчик М2 имеет коммуникационный адрес 2 и т.д. Каждый из датчиков М1-М8 тревожной сигнализации содержит, по существу, по меньшей мере, один сенсор для параметра аварийной сигнализации, например дыма, температуры или горючего газа, электронные средства оценки (упомянутые оба типа средств не показаны) и изолятор S1-S8.
Как упомянуто выше, под датчиком М следует понимать не только датчик тревожной сигнализации, но и в общем случае подключенный к сигнальной линии адресуемый прибор. Это может также быть исполнительный элемент, такой как оптический или акустический датчик тревожной сигнализации, реле, индикатор тревожной сигнализации, передающий прибор для дальнейшей передачи тревожной сигнализации и т.п.
Пусть датчик М8 с коммуникационным адресом 8 представляет собой вновь введенный в эксплуатацию датчик. Датчик М8 с целью определения его местоположения несколько раз опрашивается, согласно представлению на чертеже, от верхнего конца сигнальной линии ML. При этом сначала размыкается изолятор соответствующего датчика, уже известного в топологии системы. На первом этапе для этого используют датчик, который расположен в максимальной степени ближе к середине сигнальной линии ML. Согласно фиг. 1, - это датчик М4 с изолятором S4. Затем проверяется, является ли достижимым искомый вновь введенный датчик от выбранного конца сигнальной линии ML или нет. Тем самым получают информацию о том, находится ли искомый датчик М8 перед или после датчика М4 с разомкнутым изолятором S4.
В представленном примере выполнения вновь введенный датчик М8 ввиду разомкнутого изолятора S4 не достижим от верхнего конца сигнальной линии ML, следовательно, он должен находиться в ветви после датчика М4. Поэтому теперь замыкают изолятор S4 датчика М4 и продолжают способ деления интервала пополам в ветви после датчика М4. Согласно фиг. 2, теперь размыкают изолятор среднего датчика этой ветви в соответствии с представлением на чертеже изолятора S6 датчика М6 и получают информацию, что искомый датчик М8 расположен между датчиками М4 и М6, то есть является одним из датчиков М5 и М8.
Путем замыкания изолятора S6 датчика М6 и последующего размыкания изолятора S5 датчика М5 обеспечивается затем точная локализация вновь введенного датчика М8 спустя всего три этапа.
В общем случае в установке аварийной сигнализации, содержащей n датчиков, для локализации вновь введенного датчика требуется (log 1/n)(log 1/2) этапов с округлением до ближайшего натурального числа. Таким образом, для 30 датчиков это соответствует 5 этапам, а для 100 датчиков - 7 этапам, из которых каждый имеет длительность порядка одной секунды.
Тем самым нахождение точного местоположения вновь введенного в эксплуатацию датчика требует лишь короткого времени порядка нескольких секунд без каких-либо дополнительных затрат.
Соответствующий изобретению способ не ограничен использованием сигнальной линии ML кольцевой формы того типа, как показано на фиг. 1 и 2, а может применяться и для так называемых межсистемных линий (тупиковых линий, шлейфов), или для ответвлений. Если, например, от сигнальной линии ML между двумя датчиками был бы ответвлен шлейф с вновь введенным датчиком тревожной сигнализации, то можно было бы описанным способом определить местоположение ответвления и затем аналогичным способом на этом шлейфе определить местоположение вновь введенного в эксплуатацию датчика.
Изобретение относится к технике определения местоположения отдельного пункта из совокупности пунктов установки аварийной сигнализации, подающих сигналы тревоги к центральному пульту управления через одну сигнальную линию. Для определения местоположения вновь введенного в эксплуатацию прибора данный прибор опрашивают несколько раз с одной стороны сигнальной линии. При этом предварительно изолятор одного уже известного в топологии прибора размыкают и тем самым делят сигнальную линию на две ветви. Далее определяют, в какой из ветвей находится вновь введенный в эксплуатацию прибор. Эти операции продолжают до нахождения точного местоположения вновь введенного прибора, который предпочтительно образован датчиком тревожной сигнализации или исполнительным элементом. Изобретение обеспечивает возможность быстрого и простого определения местоположения вновь введенного в эксплуатацию прибора. 4 з.п. ф-лы. 2 ил.
1. Способ определения местоположения вновь введенного прибора (М8) установки аварийной сигнализации, в которой приборы (M1-M8) имеют изолятор (S1-S8) и подключены через сигнальную линию (ML) к центральному пульту (Z) управления, отличающийся тем, что
вновь введенный в эксплуатацию прибор (M8) опрашивают несколько раз с одной стороны сигнальной линии (ML), причем предварительно изолятор одного уже известного в топологии прибора размыкают и тем самым сигнальную линию (ML) делят на две ветви и определяют, в какой из ветвей находится вновь введенный прибор (M8), и этот способ продолжают до нахождения точного местоположения вновь введенного в эксплуатацию прибора.
2. Способ по п.1, отличающийся тем, что сначала размыкают изолятор (S4) прибора (М4), расположенного в максимальной степени ближе к середине сигнальной линии (ML), и затем на основе достижимости вновь введенного в эксплуатацию прибора (M8) от выбранного конца сигнальной линии (ML) определяют, находится ли он в ветви перед или после прибора (М4) с разомкнутым изолятором (S4).
3. Способ по п.2, отличающийся тем, что только что разомкнутый изолятор (S4) замыкают и размыкают изолятор (S6) прибора (М6), расположенного в максимальной степени ближе к середине ветви сигнальной линии (ML), содержащей вновь введенный в эксплуатацию прибор (M8), и затем на основе достижимости вновь введенного в эксплуатацию прибора (М8) от выбранного конца сигнальной линии (ML) определяют, находится ли вновь введенный прибор (M8) перед или после прибора (M6) с разомкнутым изолятором (S6).
4. Способ по п.3, отличающийся тем, что описанный способ деления интервала пополам проводят до тех пор, пока не будет найдено точное местоположение вновь введенного в эксплуатацию прибора (M8), что в случае установки аварийной сигнализации, содержащей n датчиков, происходит спустя (logl/n)(logl/2) этапов с округлением до ближайшего натурального числа.
5. Способ по любому из пп.1-4, отличающийся тем, что упомянутый прибор выполнен в виде датчика тревожной сигнализации типа датчика противопожарной сигнализации и датчика газа.
| US 6838999 B1, 04.01.2005 | |||
| СПОСОБ ОТБОРА ФОРМ САХАРНОЙ СВЕКЛЫ, УСТОЙЧИВЫХ К ЛИСТОГРЫЗУЩИМ НАСЕКОМЫМ - ВРЕДИТЕЛЯМ ВСХОДОВ | 2006 |
|
RU2319373C1 |
| Устройство автоматического управления режимом улавливания раската линейками манипулятора обжимного реверсивного прокатного стана | 1975 |
|
SU546401A1 |
| DE 4038992 C1, 06.02.1992 | |||
| УСТРОЙСТВО АДРЕСНОЙ СИГНАЛИЗАЦИИ АВТОНОМНОЙ СИСТЕМЫ ПОЖАРОТУШЕНИЯ | 1997 |
|
RU2127623C1 |

