Область техники, к которой относится изобретение
Настоящее изобретение относится к металлодетектору в соответствии с ограничительной частью пункта 1 формулы изобретения.
Уровень техники
В патентном документе ЕР 0702248 описан металлодетектор на сельскохозяйственном полевом измельчителе для распознавания посторонних металлических тел в убранной массе. Металлодетектор расположен в нижнем подающем барабане и состоит из трех магнитных катушек, разнесенных по ширине подающего барабана. Для более точного определения положения металлического предмета устройство обработки сигналов вырабатывает дифференциальные напряжения, которые соответствуют разностям напряжений между каждыми двумя из трех катушек, и сравнивает эти дифференциальные напряжения друг с другом или с пороговой величиной. Далее оно вычисляет сумму напряжений на катушках и вырабатывает сигнал привода в действие или выключения, когда сумма напряжений превышает предварительно заданную пороговую величину. В результате этого сигнала приводится в действие устройство выключения приемного барабана и включается устройство тревожной сигнализации и/или индикаторное устройство. Это устройство является наиболее близким аналогом заявляемого изобретения.
Недостаток этого известного устройства в уборочной машине состоит в том, что металлодетектор определяет только положение металлического предмета по ширине металлодетектора в момент превышения пороговой величины. Дальнейшее движение металлического предмета до остановки приемного органа машины не воспринимается и не учитывается.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в создании устройства, которое обеспечивает более точную идентификацию постороннего тела.
В соответствии с изобретением решение поставленной задачи достигается в металлодетекторе для снабженного по меньшей мере одним приводным рабочим органом рабочего аппарата для транспортирования убранной массы, состоящем из катушек для выработки электрических сигналов (S) при присутствии металлических предметов в области рабочего аппарата, в котором вырабатываемые катушками сигналы (S) детектирования улавливаются во временном окне (Z).
Предпочтительно вырабатываемые катушками сигналы детектирования улавливаются во временном окне, так что может быть определена протяженность металлического предмета как по рабочей ширине подпрессовывающего валика, так и в направлении его подачи. За счет этого обеспечивается определение дальнейшего продвижения металлического предмета во время остаточного хода транспортирующих органов и его точное положение в момент остановки рабочих органов.
Временное окно начинается, когда сигнал детектирования по меньшей мере одной катушки превышает пороговую величину, так что это временное окно начинается сразу же после обнаружения металлического предмета.
Предпочтительно временное окно заканчивается, как только рабочие органы достигли остановки, так как к этому моменту прекращается транспортирование убранной массы.
Экономичное осуществление изобретения обеспечивается в том случае, когда остановка рабочих органов контролируется датчиками числа оборотов, так как они уже предусмотрены в полевом измельчителе для контроля числа оборотов.
В предпочтительном примере осуществления изобретения через каждую катушку проходит постоянный магнит, и она создает соответствующую область детектирования, а сигналы детектирования представляют собой индуктивные напряжения, которые генерируются соответствующей катушкой в результате присутствия металлического предмета в области детектирования, создаваемой соответствующей катушкой. Таким образом, распознается присутствие металлического предмета в различных местах.
За счет того, что смежные области детектирования перекрываются и определяют границы рабочей ширины металлодетектора, присутствие металлического предмета может определяться по всей ширине рабочего органа. Кроме того, погрешности показаний датчиков в крайних зонах областей детектирования смягчаются и компенсируются за счет перекрытия.
Для непосредственно обработки сигналов детектирования они предпочтительно передаются на устройство обработки сигналов.
За счет того, что устройство обработки сигналов сравнивает сигналы детектирования с пороговой величиной и при превышении пороговой величины приводит в действие экстренную остановку по меньшей мере одного рабочего аппарата, может устраняться риск повреждения полевого измельчителя. Кроме того, за счет определения пороговой величины обеспечивается снижение или полное устранение частых ошибочных экстренных остановок.
Для определения положения и ширины металлического предмета с привязкой к рабочей ширине сигналы детектирования регистрируются в функции рабочей ширины с привязкой по меньшей мере к одному определенному моменту времени.
Для определения положения и ширины металлического предмета непосредственно при первом детектировании металлического предмета определенный момент времени определяется превышением пороговой величины.
Для определения продвижения или протяженности металлического предмета в транспортирующем устройстве сигналы детектирования предпочтительно регистрируются по времени.
Устройство обработки сигналов связано с индикаторным устройством и/или экраном, с помощью которого водитель информируется о положении металлического предмета и скорее находит его.
В первом примере осуществления индикаторное устройство и/или экран указывает, в каких областях детектирования к одному определенному моменту времени во временном окне вырабатывался сигнал детектирования, что ограничивает область поиска.
В следующем примере осуществления индикаторное устройство и/или экран указывают, в каких областях детектирования в пределах временного окна вырабатывались сигналы детектирования, так что могут распознаваться протяженность и положение металлического предмета.
В предпочтительном примере осуществления индикаторное устройство содержит несколько ламп, число и расположение которых соответствует числу и расположению областей детектирования. При этом индикаторное устройство повторяет строение металлодетектора, так что водитель по зажженным лампам может сделать заключение о положении металлического предмета по отношению к металлодетектору.
Когда индикаторное устройство расположено в области обзора рабочего аппарата, стоящий перед приемным корпусом водитель может без перемены места видеть как индикаторное устройство, так и поток убранной массы, выходящий из приемного корпуса.
За счет того, что индикаторное устройство и/или экран автоматически возвращается в исходное состояние, когда привод рабочего аппарата включается снова, водитель освобожден от этой задачи.
При расположении катушек рядом друг с другом с равномерным расстоянием поперечно направлению подачи рабочего органа области детектирования имеют равную по величине чувствительность детектирования.
Согласно примеру осуществления изобретения металлодетектор расположен на самоходной уборочной машине, а информация об обнаружении и/или виде металлического предмета во взаимосвязи с положением уборочной машины при обнаружении металлического предмета записывается в бортовом компьютере уборочной машины. За счет этого при повторном объезде этого же участка поля водителю может передаваться предупреждение, в каком месте участка были обнаружены множественные определенные металлические предметы.
Дальнейшие предпочтительные примеры осуществления являются предметом защиты в зависимых пунктах.
Перечень фигур чертежей
Далее будут подробно описаны предпочтительные примеры осуществления изобретения со ссылками на прилагаемые чертежи. На чертежах:
фиг.1 схематично изображает на виде сбоку полевой измельчитель с индикаторным устройством, показанным в увеличенном виде,
фиг.2 изображает в продольном разрезе подпрессовывающий валик со связанным с ним индикаторным устройством,
фиг.3 изображает пространственную кривую, которая представляет сигналы детектирования в функции времени и области детектирования.
Осуществление изобретения
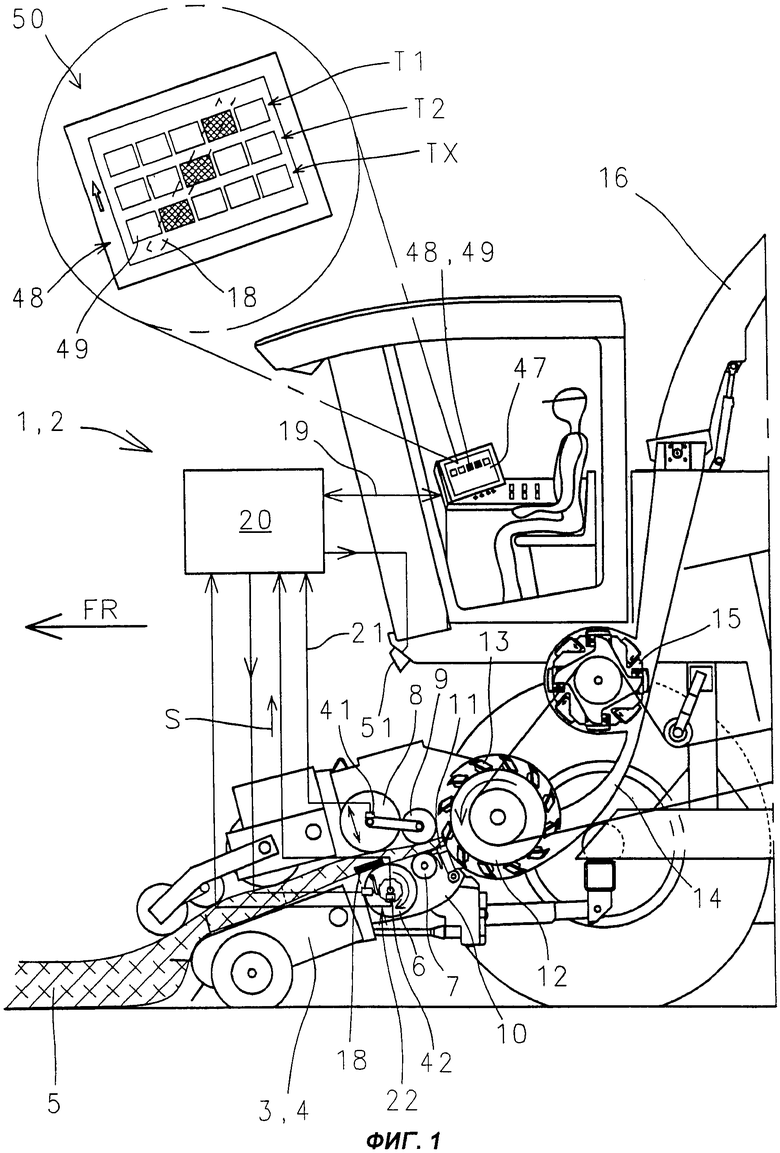
Фиг.1 схематично изображает на виде сбоку сельскохозяйственную машину 2, выполненную в виде самоходного полевого измельчителя 1. На полевом измельчителе 1 спереди расположен навесной аппарат 4 в виде подборщика 3, который является сменным и устанавливается в соответствии с видом убираемой массы. Подборщик 3 служит для того, чтобы подбирать убираемую растительную массу 5 с поля и подавать ее к рабочим органам, выполненным в виде подпрессовывающих валиков 6, 7, 8, 9 в приемном корпусе 10.
Подаваемая убранная масса 5 принимается первой парой подпрессовывающих валиков 6, 8, уплотняется и транспортируется ко второй паре подпрессовывающих валиков 7, 9, которая производит дальнейшее уплотнение подпресованной убранной массы и направляет ее в виде ковра или полосы по противорежущей пластине 11 к измельчительному барабану 12. На противорежущей пластине 11, расположенной в непосредственной близости к измельчительному барабану 12, полоса убранной массы измельчается измельчительными ножами 13 барабана 12 и транспортируется в выбросной канал 14. Внутри выбросного канала 14 расположен ускоритель 15, который еще больше разгоняет убранную массу 5, выходящую с измельчительного барабана 12, и транспортирует ее через выбросной патрубок 16 наружу из полевого измельчителя 1, например перегружает на транспортное средство.
Внутри нижнего подпрессовывающего валика 6 первой пары подпрессовывающих валиков 6, 8 расположен металлодетектор 17, с помощью которого могут детектироваться металлические предметы 18 в потоке убранной массы. Для предотвращения проникновения металлических предметов дальше в полевой измельчитель 1, то есть для устранения загрязнений в убранной массе 5, металлодетектор 17 связан с устройством 20 обработки сигналов. Устройство 20 обработки сигналов, в свою очередь, связано с устройством 22 экстренной остановки, которое известно как таковое и производит экстренную остановку подпрессовывающих валиков 6, 7, 8, 9. После распознавания металлического предмета 18 приводится в действие экстренная остановка. Устройство 20 обработки сигналов связано с центральным бортовым компьютером в кабине полевого измельчителя 1 или является блоком бортового компьютера, на экране 50 которого, как это будет более подробно показано дальше, указывается, в каком месте металлодетектора 17 был обнаружен металлический предмет 18.
Для того чтобы транспортировать металлический предмет 18 вместе с подобранной убранной массой 5 из полевого измельчителя 1 наружу, водитель включает реверсивный ход, при котором совместно приводимые подпрессовывающие валики 6, 7, 8, 9 и навесной аппарат 4 приводятся в обратном направлении.
Орган управления для включения реверсивного хода установлен снаружи кабины таким образом, что при реверсивном ходе водитель может наблюдать за потоком убранной массы, выходящим из приемного корпуса 10. Возможен также вариант выполнения, в котором устройство 20 связано с индикаторным устройством 51 (фиг.2), которое расположено снаружи кабины и, как это будет описано дальше, указывает, в каком месте металлодетектора 17 был обнаружен металлический предмет 18. Индикаторное устройство 51 расположено таким образом, что водитель, стоящий перед приемным корпусом 10, может без перемены места видеть как выходящий поток убранной массы 5, так и индикаторное устройство 51. За счет этого он может ограничить область поиска и быстрее найти металлический предмет 18 в убранной массе 5.
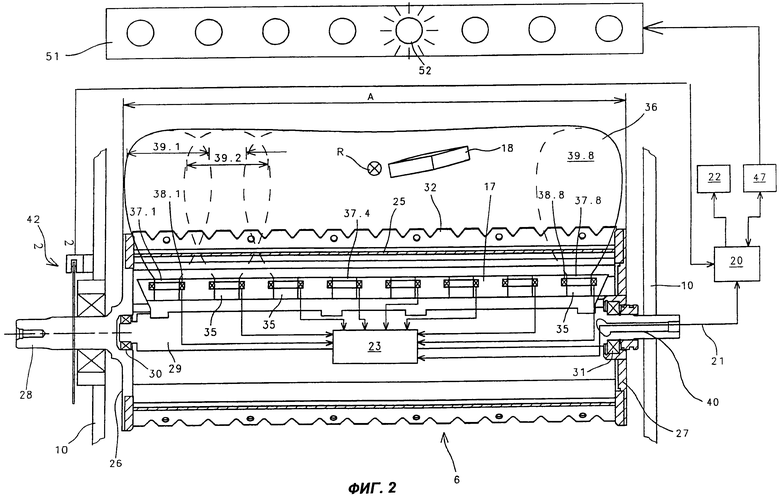
Фиг.2 изображает в продольном разрезе нижний подпрессовывающий валик 6 первой пары валиков. Подпрессовывающий валик 6 состоит из обечайки 25 валика и торцевых фланцев 26, 27. На левом по фиг.2 торцевом фланце 26 жестко укреплена консольная цапфа 28, установленная с возможностью вращения в приемном корпусе 10. Через оба торцевых фланца 26, 27 проходит ось 29, одним концом жестко связанная с приемным корпусом 10. Между осью 29 и торцевыми фланцами 26, 27 установлены подшипники 30, 31 качения, при этом ось 29 и консольная цапфа 28 проходят соосно друг другу, так что подпрессовывающий валик 6 может вращаться вокруг оси 29. Обечайка 25 валика состоит из нескольких профилей 32 валика, которые расположены между торцевыми фланцами 26, 27 и транспортируют убранную массу. На неподвижной оси 29 внутри подпрессовывающего валика 6 расположен металлодетектор 17. Он состоит из нескольких расположенных в ряд постоянных магнитов 35, которые занимают по существу всю ширину подпрессовывающего валика 6. Постоянные магниты 35 создают магнитное поле 36, направленное вверх через обечайку 25 валика и проникающее в поток убранной массы. На постоянных магнитах расположены восемь полюсных башмаков 37.1-37.8, равномерно отстоящих друг от друга по ширине подпрессовывающего валика 6 поперечно направлению R его подачи и входящих в соответствующие катушки 38.1-38.8. Катушки 38.1-38.8 служат в качестве датчиков, с помощью которых могут регистрироваться изменения в магнитном поле 36, при этом каждая катушка 38.1-38.8 образует область 39.1-39.8 детектирования. Смежные области 39.1-39.8 детектирования перекрывают друг друга, так что области детектирования охватывают всю рабочую ширину А подпрессовывающего валика 6.
Присутствие металлического предмета 18 в транспортируемой убранной массе приводит к изменению магнитного поля 36 и воздействует таким образом, что в катушках 38.1-38.8, в областях 39.1-39.8 детектирования которых происходит изменение магнитного поля 36, наводятся напряжения U. Индуктивные напряжения U передаются на сигнальный модуль 23, который в зависимости от напряжений U вырабатывает сигналы S, в свою очередь, передаваемые на устройство 20 обработки сигналов.
Линия 21 передачи сигналов, предназначенная для передачи сигналов S детектирования от сигнального модуля 23 к устройству 20 обработки сигналов, проходит наружу через сверление 40 в оси 29.
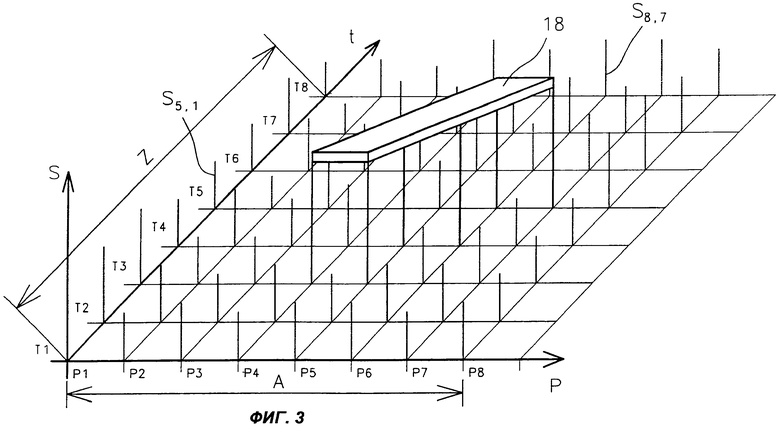
Как показано на фиг.3, сигналы S детектирования улавливаются во временном окне Z и записываются в функции времени t в запоминающем блоке устройства 20 обработки сигналов. Временное окно Z охватывает промежуток времени, начиная с момента, когда сигнал S детектирования превышает пороговую величину срабатывания, заложенную в устройстве 20 обработки сигналов. При этом устройство 20 обработки сигналов генерирует сигнал остановки, передаваемый на устройство 22 экстренной остановки, которое обеспечивает немедленную остановку подпрессовывающих валиков 6, 7, 8, 9 и навесного аппарата 4. Временное окно Z заканчивается при остановке подпрессовывающих валиков 6, 7, которая известным образом воспринимается связанными с ними датчиками 41, 42 числа оборотов, а сигналы числа оборотов от датчиков передаются на устройство 20 обработки сигналов.
Кроме того, как это представлено на фиг.3, сигналы S детектирования регистрируются в функции рабочей ширины А с привязкой к определенному моменту Т1 времени, который определяется моментом превышения пороговой величины срабатывания, и к дальнейшим определенным моментам ТХ времени в пределах временного окна.
Показанное на фиг.2 индикаторное устройство 51 выполнено в виде ряда нескольких равномерно отстоящих друг от друга ламп 52, причем расположение и число ламп 52 соответствует числу и расположению областей 39.1-39.8 детектирования металлодетектора 19. Индикаторное устройство 47 указывает, в какой из областей 39.1-39.8 детектирования с привязкой к определенному моменту Т1-ТХ времени создались напряжения U, путем того, что зажигаются соответствующие лампы 52. Возможно также, чтобы индикаторное устройство 47 указывало, в какой из областей 39.1-39.8 детектирования создались напряжения U в пределах временного окна Z. Водитель узнает по индикаторному устройству 51, в каком месте по рабочей ширине А подпрессовывающего валика 6 находится металлический предмет 18.
На фиг.1 показано в увеличенном виде индикаторное устройство в виде вынесенного экрана 50 бортового компьютера. Экран 50 является в данном случае индикаторным устройством, на котором представлены несколько расположенных один под другим рядов 48 символов 49. Расположение и число символов 49 одного ряда 48, как и в первом примере выполнения, соответствует расположению и числу областей 39.1-39.8 детектирования металлодетектора 19. Индикаторное устройство 50 указывает, в какой из областей 39.1-39.8 детектирования с привязкой к определенным моментам Т1-ТХ времени в пределах временного кона Z вырабатывались сигналы S детектирования. При этом каждый ряд 48 изображает один из моментов Т1-ТХ времени, а соответствующие символы имеют различный (или переменный) цвет. Водитель узнает по индикаторному устройству 50, в каком месте по рабочей ширине А подпрессовывающего валика 6 находится металлический предмет 18. Кроме того, он узнает протяженность металлического предмета 18 в направлении подачи подпрессовывающего валика 6.
На фиг.3 представлена система координат с тремя осями, в которой показаны сигналы S детектирования в функции времени t и рабочей ширины А в виде пространственной кривой. На основе сигналов S детектирования можно сделать непосредственное заключение о положении и протяженности металлического предмета 18.
Возможен вариант выполнения, при котором устройство 20 обработки сигналов по сигналам S детектирования определяет вид металлического предмета и на индикаторном устройстве 47, 51 дает водителю информацию, например, что он представляет собой проволоку, стержень или зубец инструмента.
Возможен вариант осуществления, когда водитель вводит в бортовой компьютер информацию об обнаружении металлического предмета и о его виде. Эта информация протоколируется, например, совместно с полученной от навигационной системы информацией о положении полевого измельчителя 1 при срабатывании экстренной остановки. При дальнейшем объезде этого же участка поля водителю может передаваться предупреждение, что в определенной области поля при предыдущей уборке были обнаружены множественные определенные металлические предметы.
Как только водитель вновь включает привод подпрессовывающих валиков 6, 7, 8, 9 или навесного аппарата 4, экранное индикаторное устройство 50, 51 автоматически возвращается в исходное состояние. Однако возможно также, что водитель возвращает его в исходное состояние вручную после того, как обыскивает убранную массу и протоколирует находку металлического предмета.
Далее, возможен вариант осуществления, при котором запоминающее устройство устройства 20 обработки сигналов выполнено в виде кольцевого запоминающего устройства, а сигналы S детектирования записываются в нем непрерывно. Это означает, что наиболее старые сигналы S детектирования стираются при записи новых сигналов. В противоположность первому примеру осуществления в этом втором варианте осуществления изобретения производится обработка тех сигналов S детектирования, которые охватываются временным окном Z.
Для специалиста в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации, не выходящие за пределы объема защиты, а также использование его в других машинах для получения описанных преимуществ.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧАЯ ИЛИ УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2008 |
|
RU2468563C2 |
| МЕТАЛЛОДЕТЕКТОР ДЛЯ КОРМОУБОРОЧНОГО КОМБАЙНА | 1993 |
|
RU2060625C1 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С УСТРОЙСТВОМ ОБНАРУЖЕНИЯ ПОСТОРОННИХ ТЕЛ | 2008 |
|
RU2466527C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЯДЕРНЫХ МАТЕРИАЛОВ И РАДИОАКТИВНЫХ ВЕЩЕСТВ | 2008 |
|
RU2364890C1 |
| ПОЛЕВОЙ ИЗМЕЛЬЧИТЕЛЬ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ | 2012 |
|
RU2512369C2 |
| СЕЛЬХОЗМАШИНА С ФУНКЦИЕЙ ЭКСТРЕННОЙ ОСТАНОВКИ | 2009 |
|
RU2492619C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА, СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТНОГО УЧАСТКА РАБОЧЕГО АГРЕГАТА ДЛЯ ТАКОЙ МАШИНЫ, А ТАКЖЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО И СИСТЕМА УПРАВЛЕНИЯ | 2022 |
|
RU2801966C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОЙ ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ И СПОСОБ ДЕТЕКТИРОВАНИЯ ДЛЯ ОБНАРУЖЕНИЯ ПРЕДМЕТОВ В ГРУНТЕ | 2017 |
|
RU2663083C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА | 2011 |
|
RU2458625C1 |
| Электропривод | 1990 |
|
SU1830611A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано для предохранения рабочих аппаратов от разрушения посторонними металлическими предметами. Рабочий аппарат для транспортирования убранной массы включает металлодетектор и приводной рабочий орган. Металлодетектор состоит из катушек для выработки электрических сигналов при присутствии металлических предметов в области рабочего аппарата. Формируемые катушками смежные области детектирования перекрываются и определяют границы рабочей ширины металлодетектора. Вырабатываемые катушками сигналы детектирования улавливаются во временном окне, что обеспечивает возможность более точной идентификации металлического предмета. 18 з.п. ф-лы, 3 ил.
1. Металлодетектор (17) для снабженного по меньшей мере одним приводным рабочим органом (6, 7) рабочего аппарата (6, 7) для транспортирования убранной массы, состоящий из катушек (38.1-38.8) для выработки электрических сигналов (S) при присутствии металлических предметов (18) в области рабочего аппарата (6, 7), причем вырабатываемые катушками (38.1-38.8) сигналы (S) детектирования улавливаются во временном окне (Z), отличающийся тем, что формируемые катушками смежные области (39.1-39.8) детектирования перекрываются и определяют границы рабочей ширины (А) металлодетектора (17).
2. Металлодетектор по п.1, отличающийся тем, что временное окно (Z) начинается, когда сигнал (S) детектирования по меньшей мере одной катушки (38.1-38.8) превышает пороговую величину.
3. Металлодетектор по п.1 или 2, отличающийся тем, что временное окно (Z) заканчивается, как только рабочие органы (6, 7) остановлены.
4. Металлодетектор по п.1, отличающийся тем, что вырабатываемые катушками (38.1-38.8) сигналы (S) детектирования улавливаются во временном окне (Z), которое начинается, когда сигнал (S) детектирования по меньшей мере одной катушки (38.1-38.8) превышает пороговую величину, и заканчивается, как только рабочие органы (6, 7) остановлены.
5. Металлодетектор по п.1, отличающийся тем, что остановка рабочих органов (6, 7, 8, 9) контролируется датчиками (42) числа оборотов.
6. Металлодетектор по любому из пп.1, 2, 4 и 5, отличающийся тем, что через каждую катушку (38.1-38.8) проходит постоянный магнит (35) и она создает соответствующую область (39.1-39.8) детектирования, а сигналы (S) детектирования представляют собой индуктивные напряжения (U), которые генерируются соответствующей катушкой (38.1-38.8) в результате присутствия металлического предмета (18) в области (39.1-39.8) детектирования, создаваемой соответствующей катушкой (38.1-38.8).
7. Металлодетектор по любому из пп.1, 2, 4 и 5, отличающийся тем, что вырабатываемые сигналы (S) детектирования передаются на устройство (20) обработки сигналов.
8. Металлодетектор по п.7, отличающийся тем, что устройство (20) обработки сигналов сравнивает сигналы (S) детектирования с пороговой величиной и при превышении пороговой величины приводит в действие экстренную остановку рабочего органа или рабочих органов (6, 7, 8, 9).
9. Металлодетектор по любому из пп.1, 2, 4 и 5, отличающийся тем, что сигналы (S) детектирования регистрируются в функции рабочей ширины (А) с привязкой по меньшей мере к одному определенному моменту (Т1-ТХ) времени.
10. Металлодетектор по п.9, отличающийся тем, что определенный момент (Т1) времени определяется превышением пороговой величины.
11. Металлодетектор по п.6, отличающийся тем, что сигналы (S) детектирования каждой области (39.1-39.8) детектирования регистрируются по времени (t).
12. Металлодетектор по п.7, отличающийся тем, что устройство (20) обработки сигналов связано с индикаторным устройством (50, 51).
13. Металлодетектор по п.12, отличающийся тем, что индикаторное устройство (50) содержит несколько ламп (52), число и расположение которых соответствуют числу и расположению областей (39.1-39.8) детектирования.
14. Металлодетектор по п.12 или 13, отличающийся тем, что индикаторное устройство (50, 51) расположено в области обзора рабочего аппарата (6, 7).
15. Металлодетектор по п.12 или 13, отличающийся тем, что индикаторное устройство (50, 51) указывает, в каких областях (39.1-39.8) детектирования по меньшей мере к одному определенному моменту (Т1-ТХ) времени во временном окне (Z) вырабатывался сигнал (S) детектирования.
16. Металлодетектор по п.12 или 13, отличающийся тем, что индикаторное устройство (50, 51) указывает, в каких областях (39.1-39.8) детектирования в пределах временного окна (Z) вырабатывались сигналы (S) детектирования.
17. Металлодетектор по п.12 или 13, отличающийся тем, что индикаторное устройство (50, 51) автоматически возвращается в исходное состояние, когда привод рабочего аппарата (6, 7) включается снова.
18. Металлодетектор по любому из пп.1, 2, 4, 5, 8, 10-12, отличающийся тем, что катушки (38.1-38.8) расположены рядом друг с другом на равном расстоянии поперечно направлению подачи рабочего органа (6).
19. Металлодетектор по любому из пп.1, 2, 4, 5, 8, 10-12, отличающийся тем, что он расположен на самоходной уборочной машине (2), а информация об обнаружении и/или виде металлического предмета (18) во взаимосвязи с положением уборочной машины (2) при обнаружении металлического предмета (18) записывается в бортовом компьютере уборочной машины (2).
| US 6105347 А, 22.08.2000 | |||
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ФЕРРОМАГНИТНЫХ ПОСТОРОННИХ ТЕЛ, В ЧАСТНОСТИ ДЛЯ ЗАЩИТЫ РАБОЧИХ ОРГАНОВ УБОРОЧНОЙ МАШИНЫ | 1992 |
|
RU2106775C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ФЕРРОМАГНИТНЫХ ПОСТОРОННИХ ТЕЛ, В ЧАСТНОСТИ ДЛЯ ЗАЩИТЫ РАБОЧИХ ОРГАНОВ УБОРОЧНЫХ МАШИН (ВАРИАНТЫ) | 2002 |
|
RU2240574C2 |
| МЕТАЛЛОДЕТЕКТОР ДЛЯ КОРМОУБОРОЧНОГО КОМБАЙНА | 1993 |
|
RU2060625C1 |
| Способ обнаружения посторонних токопроходящих предметов в потоке технологического продукта уборочной сельскохозяйственной машины | 1989 |
|
SU1746935A1 |
| Устройство для обнаружения инородных тел в убираемом сельскохозяйственной уборочной машиной материале | 1986 |
|
SU1801303A1 |
| DE 3019166 А1, 07.01.1982. | |||

