Область техники
Настоящее изобретение относится к уборочной сельхозмашине с приемным устройством для дальнейшего направления убранной массы к расположенным сзади обрабатывающим органам, причем приемное устройство снабжено устройством обнаружения посторонних тел для распознавания посторонних тел в потоке убранной массы и устройствами для незамедлительной остановки подающих устройств при обнаружении постороннего тела в убранной массе.
Уровень техники
Подающие устройства в виде уборочных навесных аппаратов с устройствами обнаружения посторонних тел используются, как правило, в уборочных сельхозмашинах, в особенности в полевых измельчителях для того, чтобы распознавать металлические тела, такие как зубцы сеноворошилок, стойки изгородей, банки от напитков или гвозди, попавшие в машину вместе с убранной массой, и в этом случае автоматически выключать подающие устройства и последующие рабочие органы. За счет этого должны предотвращаться повреждения внутри уборочной машины этими металлическими предметами, а также возможность их попадания вместе с убранной массой в корм для животных, что могло бы приводить к ранениям и даже смерти животных. В типовой конструкции такое подающее устройство состоит из нескольких пар приемных катков, расположенных одна за другой. Убранная масса, принимаемая уборочным навесным аппаратом уборочной машины, затягивается катками и, например, подается к расположенному сзади измельчительному барабану или другому рабочему органу.
Такое устройство для обнаружения посторонних тел известно из решения по патентному документу ГДР №247117 A3. В этом устройстве в подающем катке, который взаимодействует с другим подающим катком, расположен детектор металла. Детектор металла обычно установлен в зафиксированном положении внутри одного из приемных катков. Область восприятия детектора металла образована измерительным магнитным полем, генерируемым магнитной системой. При этом измерительное магнитное поле предпочтительно направлено примерно вертикально снизу в поток убранной массы или часто бывает направлено вперед к уборочному навесному аппарату. Сигнал детектора непрерывно измеряется и сравнивается с предварительно установленной пороговой величиной, причем при ее превышении на подающее устройство передается сигнал выключения.
Далее, известны устройства обнаружения посторонних тел в виде детекторов камней, которые должны защищать рабочие органы от повреждения камнями, подаваемыми вместе с убранной массой. Такое устройство обнаружения посторонних тел известно из патентного документа ГДР PS 247118. В нем измеряется и оценивается ускорение на части подающего устройства, которая может перемещаться перпендикулярно подающему устройству. При превышении определенного порога ускорения вырабатывается сигнал остановки, передаваемый на устройство остановки подающих элементов.
Недостаток известных устройств обнаружения посторонних тел и их использования в уборочных сельхозмашинах заключается в том, что такая машина при остановке всех рабочих органов больше не может принимать убранную массу. Поскольку от срабатывания устройства обнаружения посторонних тел до остановки машины проходит определенное время в зависимости от реакции оператора, это может приводить к скоплению убранной массы. Это особенно относится к полевому измельчителю, который при уборке травы движется с высокой скоростью, так что в случае обнаружения постороннего тела до момента остановки полевого измельчителя он сдвигает перед собой огромный вал травы. Когда такие скопления убранной массы должны быть приняты уборочной машиной после удаления постороннего тела, это часто приводит к перегрузке уборочной машины и может вызвать повреждения. В том случае, когда такой подлежащей обработке убираемой массой является кукуруза, это может приводить к наезду на нее и ее придавливанию, что при современном быстродействии устройств обнаружения посторонних тел может приводить к значительным потерям убираемой массы.
Раскрытие изобретения
Соответственно, задача, на решение которой направлено настоящее изобретение, заключается в устранении недостатков известных решений уровня техники и усовершенствовании уборочной сельхозмашины указанного типа, оснащенной устройством обнаружения посторонних тел, таким образом, что при обнаружении постороннего тела устройством обнаружения посторонних тел по возможности предотвращается скопление убранной массы или наезд на убранную массу и ее придавливание.
В соответствии с изобретением решение поставленной задачи достигается за счет признаков, изложенных в п.1 формулы изобретения. В зависимых пунктах изложены признаки, обеспечивающие развитие изобретения предпочтительным образом.
Согласно изобретению при обнаружении постороннего тела в потоке убранной массы посредством устройства обнаружения посторонних тел автоматически осуществляется торможение уборочной сельхозмашины и/или отвод, по меньшей мере, одной энергетической среды для снижения скорости движения уборочной сельхозмашины. За счет этого надежно устраняется скопление убранной массы, такой как собранная в валок трава, или наезд и придавливание подлежащей уборке убранной массы, такой как кукуруза. При этом предпочтительно параметр для тормозного воздействия и/или для отвода энергетической среды является регулируемым, так что за счет возможности переменной настройки всегда может быть выбрана оптимальная настройка в соответствии с ситуацией или условиями уборки. Предпочтительно, по меньшей мере, одна энергетическая среда представляет собой топливо для работы приводного двигателя и/или масло для работы гидростатического привода передвижения уборочной сельхозмашины.
За счет того, что торможение и/или отвод, по меньшей мере, одной энергетической среды для снижения скорости уборочной сельхозмашины до ее остановки при обнаружении постороннего тела является регулируемым в зависимости, по меньшей мере, от одного порогового параметра, такого как вид убираемой массы, скорость движения уборочной сельхозмашины или уклон убираемого поля, оператор уборочной машины выгодным образом освобождается от нагрузки. В зависимости от вида убираемой культуры или массы процесс уборки осуществляется с различными скоростями. При этом в случае обнаружения постороннего тела параметр, определяющий торможение и/или отвод, по меньшей мере, одной энергетической среды, может регулироваться таким образом, чтобы, например, при высокой скорости уборки избежать резкой остановки или практически полного торможения уборочной сельхозмашины и защитить от травм оператора, как правило не предупрежденного о нем.
Кроме того, в предпочтительном примере осуществления настройка параметра для торможения и/или снижения скорости движения производится в соответствии с уклоном убираемого поля. При этом, в особенности при спуске по уклону, предотвращается слишком резкая остановка уборочной машины и возможность контакта уборочного навесного аппарата с поверхностью земли с повреждением убираемой растительности и уборочного навесного аппарата.
Далее, при настройке параметра для торможения и/или отвода, по меньшей мере, одной энергетической среды может быть выгодно учитывать скорость движения уборочной машины как таковую и вес уборочного навесного аппарата, которые оказывают влияние на торможение машины.
В предпочтительном решении по развитию изобретения пороговые параметры могут устанавливаться вручную, так что оператор имеет возможность управлять настройкой параметров для торможения и/или отвода, по меньшей мере, одной энергетической среды согласно своей оценке. Кроме того, возможен вариант, в котором пороговые величины соответствующих эксплуатационных параметров автоматически воспринимаются с помощью соответствующих датчиков, так что водитель освобожден от контроля и может сосредоточиться только на процессе уборки.
В особенно предпочтительном примере осуществления торможение и/или отвод энергетической среды для снижения скорости уборочной сельхозмашины производится в зависимости от заданной величины скорости, предварительно задаваемой рукояткой регулирования подачи топлива. При этом оператор может лучше приучить себя к тому, что в случае обнаружения постороннего тела процесс торможения осуществляется таким образом, как если бы он сам перевел рукоятку регулирования подачи топлива из выбранного положения скорости движения в нулевое положение, что устраняет риск травм для оператора.
В следующем предпочтительном решении по развитию изобретения при обнаружении постороннего тела в потоке убранной массы снижение скорости движения сигнализируется с помощью сигнального средства, предпочтительно акустически и/или оптически. При этом надежно обеспечивается информирование об обнаружении постороннего тела оператора самой уборочной машины или оператора другой машины.
Для обеспечения того, чтобы следующее за уборочной машиной транспортное средство было информировано об обнаружении постороннего тела в потоке убранной массы уборочной машины и могло своевременно осуществить торможение во избежание столкновения с движущейся перед ним уборочной машиной, в предпочтительном примере осуществления сигнальное средство представляет собой устройство светового сигнала торможения уборочной машины.
В предпочтительном примере осуществления торможение и/или отвод энергетической среды осуществляется с выдержкой времени после обнаружения постороннего тела в потоке убранной массы, когда перегрузочное устройство находится в ориентированном назад положении. При этом для оператора транспортного средства, следующего за уборочной машиной, остается достаточно времени на то, чтобы отреагировать и начать процесс торможения или маневр по выравниванию и избежать столкновения с идущей впереди уборочной машиной.
В предпочтительном решении по развитию изобретения при обнаружении постороннего тела в потоке убранной массы производится поворот перегрузочного устройства в направлении движения, когда перегрузочное устройство находится в своем боковом положении перегрузки, причем поворот перегрузочного устройства производится в координации с величиной торможения и/или отвода энергетической среды для снижения скорости движения уборочной машины. За счет этого обеспечивается предотвращение потерь убранной массы при ее перегрузке на следующее рядом транспортное средство, когда оно начинает торможение не одновременно и не с таким же темпом, как уборочная машина, и частично опережает уборочную машину.
В предпочтительном примере осуществления при обнаружении постороннего тела в потоке убранной массы приемное устройство, в особенности подборщик, автоматически переводится из рабочего положения вблизи земли, по меньшей мере, в приподнятое положение, в которое он переводится на краю поля. За счет этого может эффективно предотвращаться скопление убранной массы, особенно сложенной в валок. Для усиления этого эффекта при этом предпочтительно одновременно осуществляется торможение и/или отвод энергетической среды для снижение скорости движения уборочной машины.
В дальнейшем предпочтительном решении по развитию изобретения совместно с переводом приемного устройства из рабочего положения вблизи земли, по меньшей мере, в приподнятое положение, в которое он переводится на краю поля, производится реверс рабочего движения приемного устройства. При этом уже находящаяся в приемном устройстве убранная масса выгружается за счет реверса, и оператор может возобновить процесс уборки без дополнительных потерь времени.
Другие предпочтительные примеры осуществления являются предметом защиты в зависимых пунктах формулы изобретения.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения.
На чертежах:
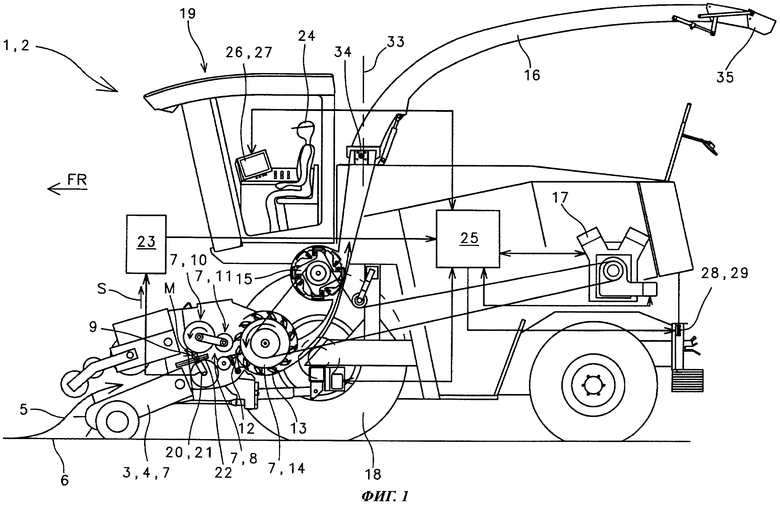
фиг.1 схематично изображает уборочную сельхозмашину в виде полевого измельчителя с устройством обнаружения посторонних тел,
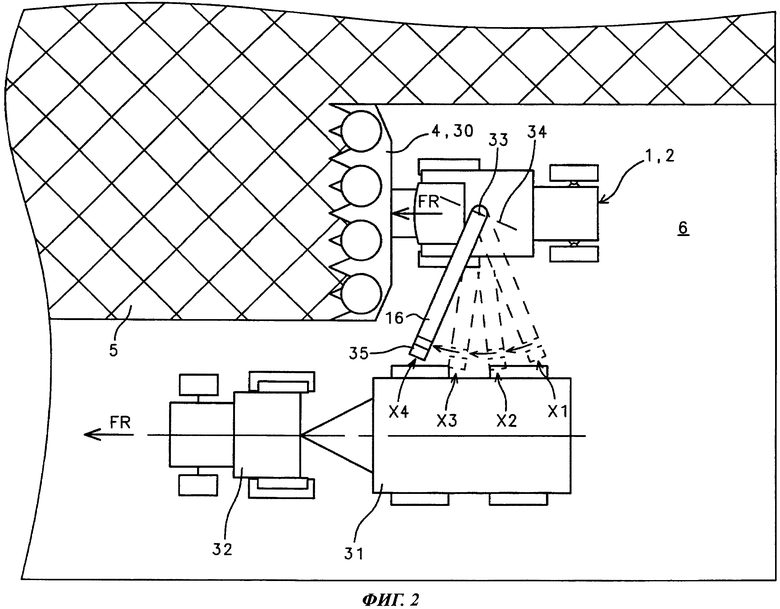
фиг.2 изображает на виде сверху уборочную сельхозмашину, выполненную в виде полевого измельчителя, со следующим рядом с ним транспортным средством в виде трактора.
Осуществление изобретения
На фиг.1 показана уборочная сельхозмашина 1 в виде полевого измельчителя 2. Спереди по направлению FR движения на полевом измельчителе 2 расположен уборочный навесной аппарат 4, выполненный в виде подборщика 3. Посредством уборочного навесного аппарата 4 убранная масса 5 подбирается с поверхности 6 земли и подается к расположенным сзади рабочим органам 7. При этом уборочный навесной аппарат 4 шириной в несколько метров направляет подобранную убранную массу 5 по существу в более узкую приемную область 9, ширина которой соответствует ширине транспортирующего канала 8. Над этой приемной областью 9 убранная масса 5 принимается и уплотняется первой парой 10 катков предварительного прессования. За первой парой 10 расположена вторая пара 11 катков предварительного прессования, которая производит дальнейшее уплотнение предварительно уплотненной убранной массы 5 с формированием полосы убранной массы и подает эту полосу через противорежущую пластину 12 к измельчительным ножам 13 измельчительного барабана 14. На противорежущей пластине 12, которая расположена непосредственно перед измельчительным барабаном 14, убранная масса 5 измельчается измельчительными ножами 13. От измельчительного барабана 14 она разгоняется или ускоряется расположенным сзади метателем 15 и затем разгружается разгрузочным устройством 16 из полевого измельчителя 2, например, с перегрузкой на не показанное здесь транспортное средство. Привод передвижения уборочной сельхозмашины 1 производится от центрального приводного двигателя 17. Он связан с приводными колесами 18 полевого измельчителя 2 посредством не показанного приводного вала и не показанного передаточного механизма. Регулирование скорости движения производится с помощью известной и не представленной здесь рукоятки регулирования подачи топлива, которая может быть выполнена в виде ручного рычага или в виде педали и расположена в кабине 19 водителя.
Внутри нижнего катка предварительного прессования первой пары 10 расположено устройство 20 обнаружения посторонних тел в виде детектора 21 металла, с помощью которого могут восприниматься металлические предметы 22 в потоке убранной массы. При этом возможен вариант осуществления, в котором устройство 20 обнаружения посторонних тел выполнено в виде детектора камней. Конструкция и функционирование детектора 21 металла, который сам по себе известен, подробно описаны в патентном документе ФРГ №102005005736 A1, который включен в данное описание в качестве ссылки. Детектор 21 металла работает с измерительным магнитным полем М, которое направлено вверх в поток убранной массы, так что убранная масса 5 проходит через это магнитное поле М. Металлические предметы 22 вызывают изменение измерительного магнитного поля М, что распознается детектором 21 металла. Эти изменения измерительного магнитного поля М передаются на не представленный здесь подробно сигнальный модуль, который в зависимости от изменений напряжения генерирует сигналы S обнаружения, передаваемые на устройство 23 обработки сигналов. В свою очередь, это устройство 23 обработки сигналов связано с известным и поэтому здесь не представленным устройством быстрой остановки, которое обеспечивает незамедлительную остановку пар 10, 11 катков предварительного прессования и уборочного навесного аппарата 4. Для того чтобы вывести металлический предмет 22 вместе с уже подобранной убранной массой 5 из полевого измельчителя 2, оператор 24 включает реверс привода, при котором совместно приводимые пары 10, 11 катков предварительного прессования и уборочный навесной аппарат 4 приводятся в обратном направлении.
До настоящего времени после обнаружения в потоке убранной массы постороннего тела остановка уборочной машины 1 производилась самим оператором 24 в зависимости от быстроты его реакции, однако всегда с задержкой по времени. Таким образом, уборочная машина 1 с остановленным уборочным навесным аппаратом 4 и остановленными приемными органами 10, 11 еще несколько метров толкала перед собой находящуюся перед ней убранную массу 5, что вызывало ее скопление. Эти скопления затем должны были устраняться оператором часто вручную, чтобы после удаления постороннего тела из потока убранной массы или из рабочих органов можно было продолжить процесс уборки. Все это означает значительные потери времени при уборке.
Именно эту проблему решает изобретение, согласно которому предусмотрено, что при обнаружении постороннего тела в потоке убранной массы с помощью устройства 20 обнаружения посторонних тел автоматически производится торможение и/или отвод, по меньшей мере, одной энергетической среды для снижения скорости движения уборочной машины 1 для того, чтобы избежать скопления убранной массы 5, такой как сложенная в валок трава, или наезда на убранную массу 5, такую как кукуруза, и ее придавливание. При этом, по меньшей мере, одна энергетическая среда, как это хорошо известно в уборочных машинах, может быть топливом для работы приводного двигателя 17, который поставляет мощность для привода передвижения, и/или маслом для гидростатического привода передвижения. При этом предпочтительно параметр, при котором производится торможение или отвод энергетической среды, является регулируемым для обеспечения возможности выбора оптимальной настройки в соответствии с ситуацией или условиями уборки.
Для этого устройство 20 обнаружения посторонних тел связано с устройством 25 управления для управления тормозным действием известного и не представленного здесь тормозного устройства и/или для управление отводом энергетической среды с помощью не представленной рукоятки регулирования подачи топлива для снижения скорости движения уборочной машины 1. При этом сигнал S обнаружения передается на устройство 25 управления и сохраняется в нем. Кроме того, устройство 25 управления связано с регулировочным устройством 26 и устройством быстрой остановки. Регулировочное устройство 26 регулирует настройку параметра для торможения и/или параметра для отвода энергетической среды для снижения скорости движения уборочной машины 1 в случае обнаружения постороннего тела. В принципе предусмотрено, что торможение и/или отвод энергетической среды для снижения скорости движения уборочной машины 1 производится до полной остановки уборочной машины 1. Однако возможен вариант, при котором скорость движения не снижается ниже свободно определяемой величины. В связанное с устройством 25 управления регулировочное устройство 26 могут быть введены пороговые параметры в зависимости от эксплуатационных параметров в качестве основы для настройки параметров для торможения и/или отвода энергетической среды при обнаружении постороннего тела. Эти пороговые параметры могут устанавливаться оператором 24 и могут быть изменены на основании его оценки. В качестве эксплуатационных параметров могут учитываться в особенности вид убранной массы, скорость движения уборочной сельхозмашины 1 как таковая или уклон поля. При этом выгодным образом может достигаться освобождение оператора от нагрузки за счет возможности точной настройки пороговых величин эксплуатационных параметров в соответствии с действительными условиями уборки. В частности, в зависимости от вида убираемой массы используются различные скорости движения, например более высокая скорость при подборе травы и более низкая при уборке кукурузы. При этом при более высокой скорости в принципе устанавливается более низкая пороговая величина, чтобы избежать резкой остановки уборочной машины 1 на высокой скорости, что связано с риском травм для оператора 24.
При этом регулировочное устройство 26 может быть выполнено таким образом, что пороговые величины эксплуатационных параметров могут вводиться оператором 24 вручную из кабины 19 с помощью панели 27 управления. Возможен также вариант, в котором пороговые величины эксплуатационных параметров автоматически воспринимаются соответствующими датчиками (не показаны), так что оператор 24 освобожден от контроля эксплуатационных параметров и может полностью сосредоточиться на процессе уборки. Дополнительно предусмотрено, что настройка параметров для торможения и/или отвода энергетической среды в целях снижения скорости движения осуществляется в соответствии с уклоном убираемого поля, так что при спуске с уклона может предотвращаться слишком резкая остановка уборочной машины 1 и контакт уборочного навесного аппарата 4 с поверхностью 6 земли с повреждением убранной массы и уборочного навесного аппарата 4. Далее, при настройке параметров для торможения и/или отвода энергетической среды могут учитываться скорость уборки уборочной машиной 1 как таковая, а также вес уборочного навесного аппарата 4. Это особенно важно при использовании крупных и тяжелых уборочных навесных аппаратов 4, чтобы при резкой остановке уборочной машины 1 избежать их излишнего наклона вперед и повреждения. Дополнительно настройка параметров для торможения и/или отвода энергетической среды в целях снижения скорости движения может осуществляться в соответствии с уклоном убираемого поля, так что при спуске с уклона может предотвращаться слишком резкая остановка уборочной машины 1 и контакт уборочного навесного аппарата 4 с поверхностью 6 земли и таким образом предотвращаться повреждение убранной массы и уборочного навесного аппарата 4.
Далее, предусмотрено, что торможение и/или отвод энергетической среды в целях снижения скорости движения уборочной машины 1 осуществляется в зависимости от предварительно заданной величины скорости, задаваемой рукояткой регулирования подачи топлива. За счет того, что оператор 24 уже перед обнаружением посторонних тел привыкает к действию процесса торможения для снижения скорости движения при этом обнаружении, в значительной степени устраняется потенциальный риск травмирования оператора 24.
В простейшем случае может быть предусмотрено, что при обнаружении постороннего тела устройство 25 управления автоматически с помощью соответствующих не показанных здесь средств приводит в действие ножной тормоз. Это позволяет простым образом обеспечить торможение уборочной машины 1 и предотвратить скопление убранной массы 5. Возможен вариант осуществления, при котором при обнаружении постороннего тела помимо торможения и/или отвода энергетической среды для снижения скорости движения производится снижение числа оборотов приводного двигателя 17, чтобы получить дополнительное снижение скорости движения уборочной машины 1.
Дополнительно при обнаружении постороннего тела в потоке убранной массы снижение скорости движения может сигнализироваться акустически и/или оптически с помощью, по меньшей мере, одного сигнального средства 29, в данном примере выполненного в виде устройства 28 светового сигнала торможения. При этом срабатывание устройства 28 светового сигнала торможения предупреждает оператора машины, следующей за уборочной машиной 1, и тот может своевременно затормозить, чтобы избежать столкновения с уборочной машиной 1.
В следующем примере осуществления при обнаружении постороннего тела в потоке убранной массы производится автоматический перевод уборочного навесного аппарата 4, который выполнен здесь в виде подборщика 3, из показанного рабочего положения вблизи земли в не показанное, по меньшей мере, приподнятое положение, в которое он переводится на краю поля. За счет этого надежно обеспечивается то, что, например, уложенная в валок убранная масса, такая как трава, не образует скопления, несмотря на дальнейшее движение уборочной машины 1. При этом возможен вариант, при котором наряду с переводом подборщика 3 из рабочего положения, по меньшей мере, в приподнятое положение одновременно, как это уже представлено на фиг.1, производится торможение уборочной машины 1 и/или отвод энергетической среды для снижения скорости движения, так что скопление убранной массы 5 при обнаружении постороннего тела предотвращается особенно эффективно. Предпочтительно вместе с переводом уборочного навесного аппарата 4 из рабочего положения вблизи земли, по меньшей мере, в приподнятое положение, в которое он переводится на краю поля, производится реверс привода рабочих органов 7, так что уже находящаяся в них убранная масса 5 выгружается за счет реверса, и оператор 24 может возобновить процесс уборки без дополнительных потерь времени.
На фиг.2 полевой измельчитель 2 показан на виде сверху. Спереди полевой измельчитель оснащен уборочным навесным аппаратом 4, в данном случае кукурузной приставкой 30, которая срезает убираемую массу 5, принимает ее и подает к не показанному измельчительному устройству. Измельченная убранная масса 5 далее перегружается перегрузочным устройством 16 на транспортное средство 31. Транспортное средство 31 прицеплено к трактору 32, который в идеальном случае движется параллельно рядом или непосредственно за полевым измельчителем 2 (не показано). Известным образом расположенное за кабиной 19 водителя перегрузочное устройство 16 может поворачиваться вокруг вертикальной оси 33 и вокруг горизонтальной оси 34 для изменения его высотного положения. Кроме того, дальность выбрасываемой струи убранной массы регулируется с помощью поднимаемого и опускаемого перегрузочного дефлектора 35. При повороте перегрузочного дефлектора 35 вверх дальность струи убранной массы увеличивается, а при повороте вниз уменьшается.
Во время рабочего передвижения при уборке перед оператором 24 уборочной сельхозмашины 1 возникает проблема в том, что в случае обнаружения постороннего тела уборочная машина 1 затормаживает ход, однако при этом убранная масса 5 продолжает выбрасываться перегрузочным устройством 16. Как правило, при обнаружении постороннего тела оператор следующего рядом транспортного средства 31 не начинает процесс торможения одновременно с самой уборочной машиной 1, так что их идеальное относительное положение нарушается, и уборочная машина отстает. При этом все еще перегружаемая убранная масса 5 выбрасывается не на транспортное средство 31, а позади него на поверхность 6 земли.
В соответствии изобретением предусмотрено, что когда перегрузочное устройство 16 занимает боковое перегрузочное положение Х1-Х4 и происходит обнаружение постороннего тела, перегрузочное устройство 16 поворачивается в направлении FR движения так, что перегрузочное устройство 16 догоняет ушедший вперед транспортный тягач 32, чтобы обеспечить возможность перегрузки оставшейся в уборочной машине 1 убранной массы 5 на транспортное средство 31. При этом предпочтительно поворот перегрузочного устройства 16 осуществляется в координации с торможением и/или снижением скорости движения уборочной машины 1 при обнаружении постороннего тела, так что по возможности выдерживается положение точки падения струи убранной массы (не показана) на транспортное средство 31.
В том случае, когда транспортное средство 31 находится позади уборочной машины 1 и перегрузочное устройство 16 при уборке занимает не показанное ориентированное назад положение, при обнаружении постороннего тела устройством 20 обнаружения посторонних тел торможение или снижение скорости движения уборочной машины 1 осуществляется с выдержкой времени после обнаружения, так что оператор следующего за уборочной машиной 1 транспортного тягача 32 может своевременно начать процесс торможения и избежать столкновения с уборочной машиной 1.
Специалисту в данной области понятно, что при осуществлении изобретения возможны различные изменения и модификации, не выходящие за пределы объема защиты в пунктах формулы изобретения, а также использование его в других машинах для получения описанных преимуществ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2009 |
|
RU2495558C2 |
| СЕЛЬХОЗМАШИНА С ФУНКЦИЕЙ ЭКСТРЕННОЙ ОСТАНОВКИ | 2009 |
|
RU2492619C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2012 |
|
RU2596143C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2008 |
|
RU2457662C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2009 |
|
RU2493688C2 |
| САМОХОДНАЯ УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С УПРАВЛЯЕМЫМ ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2476061C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2012 |
|
RU2583681C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2007 |
|
RU2432733C2 |
| РАБОЧАЯ ИЛИ УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2008 |
|
RU2468563C2 |
| УСТРОЙСТВО ДЛЯ ОПТИМИЗАЦИИ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ НА СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2001 |
|
RU2282972C2 |
Изобретение относится к уборочной сельскохозяйственной машине с устройством обнаружения посторонних тел в области наблюдения за потоком убранной массы. Уборочная машина содержит приемное устройство, устройство для обработки убранной массы, перегрузочное устройство и устройство управления. Приемное устройство включает устройство обнаружения посторонних тел. При обнаружении посторонних тел устройство управления осуществляет автоматическое торможение уборочной машины и/или отвод, по меньшей мере, одной энергетической среды для снижения скорости движения машины. Параметр для тормозного воздействия и/или отвода энергетической среды является регулируемым. За счет торможения уборочной машины при обнаружении посторонних предметов в потоке убранной массы предотвращается скопление убранной массы перед ней или наезд на убранную массу и ее придавливание. 14 з.п. ф-лы, 2 ил.
1. Уборочная сельхозмашина для уборки и/или дальнейшей обработки убранной массы, содержащая перегрузочное устройство для перегрузки убранной массы и приемное устройство, содержащее устройство обнаружения посторонних тел для обнаружения посторонних тел в области наблюдения за потоком убранной массы, отличающаяся тем, что она содержит устройство (25) управления, выполненное с возможностью осуществления автоматического торможения уборочной сельхозмашины (1) и/или отвода, по меньшей мере, одной энергетической среды для снижения скорости движения при обнаружении постороннего тела в потоке убранной массы посредством устройства (20) обнаружения посторонних тел, причем параметр для тормозного воздействия и/или для отвода энергетической среды является регулируемым.
2. Уборочная сельхозмашина по п.1, отличающаяся тем, что, по меньшей мере, одна энергетическая среда представляет собой топливо для работы приводного двигателя уборочной сельхозмашины и/или масло для работы гидростатического привода передвижения.
3. Уборочная сельхозмашина по п.1, отличающаяся тем, что торможение и/или отвод, по меньшей мере, одной энергетической среды уборочной машины" (1) является регулируемым в зависимости, по меньшей мере, от одного порогового параметра.
4. Уборочная сельхозмашина по п.3, отличающаяся тем, что пороговыми параметрами являются вид убираемой массы, скорость движения уборочной сельхозмашины (1), вес уборочного навесного аппарата (4) или уклон убираемого поля.
5. Уборочная сельхозмашина по п.3, отличающаяся тем, что пороговые параметры могут устанавливаться вручную или автоматически.
6. Уборочная сельхозмашина по одному из пп.1-3, отличающаяся тем, что устройство (25) управления выполнено с возможностью осуществлять торможение и/или отвод энергетической среды для снижения скорости уборочной сельхозмашины (1) в зависимости от заданной величины скорости, предварительно задаваемой рукояткой регулирования подачи топлива.
7. Уборочная сельхозмашина по одному из пп.1-3, отличающаяся тем, что устройство (25) управления выполнено с возможностью осуществлять акустическую и/или оптическую сигнализацию снижения скорости движения с помощью сигнального средства при обнаружении постороннего тела в потоке убранной массы.
8. Уборочная сельхозмашина по п.7, отличающаяся тем, что, по меньшей мере, одно сигнальное средство представляет собой устройство (29) светового сигнала торможения уборочной машины.
9. Уборочная сельхозмашина по одному из пп.1-5, отличающаяся тем, что устройство (25) управления выполнено с возможностью осуществлять торможение и/или снижение скорости движения уборочной машины с выдержкой времени после обнаружения постороннего тела в потоке убранной массы, когда перегрузочное устройство (16) находится в ориентированном назад положении.
10. Уборочная сельхозмашина по одному из пп.1-5, отличающаяся тем, что устройство (25) управления выполнено с возможностью осуществлять поворот перегрузочного устройства в направлении (FR) движения сельхозмашины при боковом положении (X1-Х4) перегрузки перегрузочного устройства (16) при обнаружении постороннего тела в потоке убранной массы, причем поворот перегрузочного устройства (16) производится в координации с величиной торможения и/или снижения скорости движения уборочной машины (1).
11. Уборочная сельхозмашина по одному из пп.1-5, отличающаяся тем, что устройство (20) обнаружения посторонних тел выполнено в виде детектора (21) камней или металла.
12. Уборочная сельхозмашина по одному из пп.1-5, отличающаяся тем, что устройство (25) управления выполнено с возможностью осуществлять перевод приемного устройства, в особенности подборщика (3), из рабочего положения вблизи земли, по меньшей мере, в приподнятое положение, в котором он находится на краю поля, при обнаружении постороннего тела в потоке убранной массы посредством устройства (20) обнаружения посторонних тел.
13. Уборочная сельхозмашина по одному из пп.1-5, отличающаяся тем, что выполнена с возможностью осуществлять одновременно торможение и снижение скорости движения уборочной машины (1).
14. Уборочная сельхозмашина по одному из пп.1-5, отличающаяся тем, что перевод приемного устройства из рабочего положения вблизи земли, по меньшей мере, в приподнятое положение, в которое он переводится на краю поля, обеспечивается оператором вручную.
15. Уборочная сельхозмашина по п.12, отличающаяся тем, что устройство (25) управления выполнено с возможностью осуществлять совместно с переводом приемного устройства из рабочего положения вблизи земли, по меньшей мере, в приподнятое положение, в которое он переводится на краю поля, также и реверс рабочего движения приемного устройства.
| Теплообменный аппарат | 1988 |
|
SU1523876A1 |
| Щипцы | 1979 |
|
SU904684A1 |
| Устройство для улавливания инородныхпРЕдМЕТОВ B МАшиНЕ для убОРКи и изМЕль-чЕНия РАСТиТЕльНОй МАССы | 1978 |
|
SU835357A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ФЕРРОМАГНИТНЫХ ПОСТОРОННИХ ТЕЛ, В ЧАСТНОСТИ ДЛЯ ЗАЩИТЫ РАБОЧИХ ОРГАНОВ УБОРОЧНЫХ МАШИН (ВАРИАНТЫ) | 2002 |
|
RU2240574C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ФЕРРОМАГНИТНЫХ ПОСТОРОННИХ ТЕЛ, В ЧАСТНОСТИ, ДЛЯ ЗАЩИТЫ РАБОЧИХ ОРГАНОВ УБОРОЧНЫХ МАШИН | 2001 |
|
RU2198412C1 |
| Устройство для обнаружения инородных тел в убираемом сельскохозяйственной уборочной машиной материале | 1986 |
|
SU1801303A1 |
| Способ электроэрозионной обработки | 1978 |
|
SU666021A1 |

