Область техники
Настоящее изобретение относится к устройству управления движущей силой для транспортного средства с независимым приводом модулей колес от отдельных источников привода, и, в частности, к устройству управления движущей силой для транспортного средства с независимым приводом модулей колес, которое может управлять множеством источников привода с помощью общей схемы управления.
Уровень техники
В последние годы все больше внимания привлекают гибридные транспортные средства и электрические транспортные средства, поскольку они не причиняют ущерба окружающей среде. Гибридное транспортное средство имеет в качестве источника движущей силы обычный двигатель и в дополнение к нему двигатель, приводимый в движение от источника энергии постоянного тока через преобразователь постоянного тока в переменный. Более конкретно, двигатель приводят во вращение для получения источника движущей силы, и источник энергии постоянного тока также обеспечивает напряжение постоянного тока, которое, в свою очередь, преобразуют с помощью преобразователя в напряжение переменного тока, используемое для вращения двигателя для получения источника движущей силы.
Электрическое транспортное средство представляет собой транспортное средство, имеющее в качестве источника движущей силы двигатель, приводимый во вращение от источника энергии постоянного тока через преобразователь постоянного тока в переменный.
Для гибридных транспортных средств и электрических транспортных средств было исследовано транспортное средство, в котором привод правого и левого модулей приводных колес осуществляется независимо с помощью отдельных двигателей или аналогичных источников привода для независимого привода модулей колес (см., например, публикации выложенных заявок на патент Японии №№2001-28804, 2004-328991, 2001-78303, 2005-119647, 2-133005, 2004-175313 и 4-145810). Оно обеспечивает увеличенную движущую силу по сравнению с электрическим транспортным средством, в котором установлен только один двигатель, используемый в качестве источника привода, и также в нем воплощается точное управление, удовлетворяющее требованиям водителя транспортного средства приводом на четыре колеса.
Например, в указанной заявке №2001-28804 раскрыто электрическое транспортное средство, в котором установлено множество индукционных двигателей, соединенных с модулями правого и левого приводных колес для независимого привода соответствующий модулей приводных колес. Вначале преобразователь постоянного тока в переменный подключен к каждому индукционному двигателю. В соответствии с публикацией, такие преобразователи постоянного тока в переменный интегрированы в одиночный преобразователь постоянного тока в переменный для уменьшения веса и стоимости транспортного средства.
В данном случае, если правый и левый и индукционные двигатели приводятся в движение от общего преобразователя постоянного тока в переменный, и транспортное средство поворачивает, и в нем правый и левый индукционные двигатели вращаются с разной скоростью, разность скоростей вращения приводит к разности между выводимыми крутящими моментами, что отрицательно влияет на способность движения транспортного средства в повороте.
Более конкретно, индукционный двигатель имеет характеристику, обеспечивающую выходной крутящий момент, изменяющийся со скоростью проскальзывания, которая соответствует скорости вращения ротора минус скорость вращения тока привода. Таким образом, когда транспортное средство поворачивает, модуль его внешнего колеса вращается с более высокой скоростью, чем внутренний модуль колеса, и соответственно, скорость проскальзывания внешнего модуля колеса становится меньше, чем скорость проскальзывания внутреннего модуля колеса, и индукционный двигатель, который осуществляет привод внутреннего модуля колеса, таким образом, начинает выводить больший крутящий момент, чем крутящий момент, которым осуществляют привод внешнего модуля колеса. В результате оказывается отрицательное влияние на способность поворота транспортного средства.
В соответствии с этим, в указанной заявке №2001-28804 принята конфигурация, которая управляет скоростью проскальзывания в соответствии с разностью скоростей вращения между правым и левым индукционными двигателями, что позволяет генерировать равные крутящие моменты индукционных двигателей. Таким образом, когда транспортное средство поворачивает, индукционный двигатель, вращающийся с меньшей скоростью, может выводить крутящий момент без его увеличения. Таким образом, транспортное средство может поворачивать эффективно и более плавно.
Кроме того, в указанной заявке №2001-28804 описано, что, когда транспортное средство движется по прямой, скорости вращения правого и левого индукционных двигателей сравнимы, и когда индукционными двигателями управляют в режиме их питания, меньшее значение скорости вращения устанавливается как опорная скорость вращения, и когда индукционными двигателями управляют в режиме регенерации, большее значение скорости вращения устанавливается как опорная скорость вращения, в результате чего осуществляется управление вектором. В соответствии с этим, когда транспортное средство движется по прямой, и если его модуль колеса проскальзывает или буксует, крутящий момент, который выделяется для проскальзывающего или буксующего модуля колеса, может быть уменьшен, и двигателями можно управлять для устранения проскальзывания или пробуксовки.
В соответствии с указанной публикацией №2001-28804, когда транспортное средство движется по прямой, управление вектором можно осуществлять для управления индукционными двигателями в диапазоне, позволяющем двигателям высокоэффективно осуществлять привод двигателей. Однако когда правый и левый электродвигатели вращаются с одинаковой скоростью, тогда правым и левым индукционными двигателями можно управлять, чтобы приводить их с получением крутящего момента, рассчитанного для положения педали акселератора, передачи и значения скорости транспортного средства, уменьшенного вдвое. Как можно видеть в отдельных индукционных двигателях, при этом необязательно осуществляется высокоэффективный привод этих двигателей. Более конкретно, двигатель имеет характеристику эффективности, которая обычно изменяется в зависимости от выходного крутящего момента и количества оборотов в минуту. Однако выходной крутящий момент постоянно балансируют в правом и левом индукционных двигателях, независимо от выходного крутящего момента и количества оборотов в минуту, и индукционные двигатели могут приводиться в движение менее эффективно.
В соответствии с этим, если одиночный преобразователь постоянного напряжения в переменное используется при осуществлении привода множества индукционных двигателей, отражение эффективности соответствующего отдельного привода индукционного двигателя при распределении среди индукционных двигателей движущей силы, выводимой из индукционного двигателя, может способствовать получению транспортного средства с уменьшенными весом и стоимостью, а также позволяет обеспечить более высокую общую эффективность привода двигателей транспортного средства.
Кроме того, когда транспортное средство поворачивает, назначение выходной движущей силы индукционных двигателей среди индукционных двигателей, в соответствии с двигателем, в направлении которого транспортное средство поворачивает, также может быть эффективным при обеспечении безопасного движения транспортного средства.
Настоящее изобретение было выполнено с целью устранения такого недостатка, и в нем рассматривается устройство управления движущей силой для транспортного средства, которое осуществляет независимый привод модулей колес, которое позволяет выполнять эффективный привод и высокую стабильность движения.
Сущность изобретения
Настоящее изобретение направлено на создание устройства управления движущей силой привода транспортного средства с независимым приводом модулей колес, включающего в себя: n двигателей-генераторов, каждый из которых соединен с модулем привода колеса и приводится в движение независимо друг от друга, причем n представляет собой натуральное число, равное, по меньшей мере, двум; схему привода, выполненную с возможностью совместного ее использования упомянутыми n двигателями-генераторами и выполненную с возможностью получения электроэнергии от источника питания для привода упомянутых n двигателей-генераторов; и механизм переключения, предназначенный для выборочного переключения состояния, в котором один из упомянутых n двигателей-генераторов и схема привода соединены вместе, в состояние, в котором m из упомянутых n двигателей-генераторов и схема привода соединены вместе, причем m представляет собой натуральное число, равное, по меньшей мере, двум и не превышающее n.
Настоящее устройство управления движущей силой, в котором используется конфигурация с приводом множества двигателей-генераторов от одной схемы привода, может быть уменьшено в размере и весе, и стоимости. Кроме того, из множества двигателей-генераторов, один или, по меньшей мере, два двигателя-генератора можно выбрать, соответствующим образом, в качестве двигателя (двигателей)-генератора, используемого как источник (источники) движущей силы.
Настоящее изобретение направлено на создание устройства управления движущей силой для транспортного средства с независимым приводом модулей колес, включающего в себя: n двигателей-генераторов, каждый из которых соединен с модулем привода колеса и приводится в движение независимо друг от друга, причем n представляет собой натуральное число, равное, по меньшей мере, двум; схему привода, выполненную с возможностью совместного ее использования упомянутыми n двигателями-генераторами и выполненную с возможностью получения электроэнергии от источника питания для привода упомянутых n двигателей-генераторов; и устройство управления, управляющее схемой привода в соответствии с тем, как транспортное средство движется в данный момент времени. Устройство управления включает в себя: первое средство привода, предназначенное для привода m из упомянутых n двигателей-генераторов с помощью упомянутой схемы привода, причем m представляет собой натуральное число, равное, по меньшей мере, двум и не превышающее n; и второе средство привода, предназначенное для привода одного из упомянутых n двигателей-генераторов от схемы привода.
Настоящее устройство управления движущей силой, в котором применяется конфигурация, приводящая в движение множество двигателей-генераторов от общей схемы привода, может быть уменьшена в размере и весе, и стоимости. Кроме того, из множества двигателей-генераторов, один или, по меньшей мере, два двигателя-генератора могут быть выбраны, соответствующим образом, в качестве двигателя (двигателей)-генератора, используемого как источник (источники) движущей силы. Таким образом, в случае, когда требуется, чтобы транспортное средство выводило большую или малую движущую силу, можно осуществлять высокоэффективный привод выбранного двигателя (двигателей)-генератора. В результате может быть улучшена общая эффективность привода двигателей-генераторов.
Настоящее изобретение направлено на создание устройства управления движущей силой для транспортного средства с независимым приводом модулей колес, включающего в себя: n двигателей-генераторов, каждый из которых соединен с модулем привода колеса и приводится в движение независимо друг от друга, причем n представляет собой натуральное число, равное, по меньшей мере, двум; схему привода, выполненную с возможностью совместного ее использования упомянутыми n двигателями-генераторами и выполненную с возможностью получения электроэнергии от источника питания для привода упомянутых n двигателей-генераторов; n схем переключателей, выполненных с возможностью электрического подключения/отключения упомянутой схемы привода и упомянутых n двигателей-генераторов, соответственно; и устройство управления, управляющее схемой привода, в соответствии с тем, как транспортное средство движется в данный момент времени, для выборочного перевода одной или m из n схем переключателей в состояние соединения, а также для того, чтобы обеспечить совместное генерирование двигателями-генераторами, соединенными с одной или m из n схем переключателей, движущей силы, удовлетворяющей значению движущей силы, которую должно выводить транспортное средство.
Настоящее устройство управления силой привода, в котором используется конфигурация привода множества двигателей-генераторов с помощью общей схемы привода, может быть уменьшено в размере и весе, и стоимости. Кроме того, из множества двигателей-генераторов, один или, по меньшей мере, два двигателя-генератора можно выбрать, соответствующим образом, в качестве двигателя (двигателей)-генератора, используемого в качестве источника (источников) движущей силы. Таким образом, в случае, когда транспортное средство должно выводить большую или малую движущую силу, можно осуществлять чрезвычайно эффективный привод выбранного двигателя(двигателей)-генератора. В результате можно улучшить общую эффективность привода двигателей-генераторов. Кроме того, двигатель-генератор, который не следует приводить в движение, может быть выбран из множества двигателей-генераторов, в соответствии с направлением, в котором движется транспортное средство. Транспортное средство, таким образом, может плавно поворачивать. Это обеспечивает стабильное движение транспортного средства.
Предпочтительно, если требуется, чтобы транспортное средство выводило относительно малую движущую силу, устройство управления выборочно переводит в состояние соединения одну из n схем переключателя, и, если требуется, чтобы транспортное средство выводило относительно большую движущую силу, устройство управления выборочно переводит в состояние соединения m из n схем переключателя, причем m представляет собой натурально число, равное, по меньшей мере, двум и не превышающее n.
Настоящее устройство управления движущей силой позволяет выбирать один или, по меньшей мере, два двигателя-генератора из множества двигателей-генераторов, соответствующим образом, в качестве двигателя (двигателей)-генератора, используемого в качестве источника (источников) движущей силы в соответствии с требуемой для транспортного средства движущей силой. Таким образом, каждый раз, когда требуемая движущая сила может быть большой или малой, может быть обеспечен высокоэффективный привод выбранного двигателя (двигателей)-генератора. В результате может быть улучшена общая эффективность привода двигателей-генераторов.
Предпочтительно устройство управления включает в себя: модуль определения скорости вращения, предназначенный для определения значения скорости вращения каждого из n двигателей-генераторов; модуль определения требуемой движущей силы, определяющий требуемую движущую силу, которая требуется для данного транспортного средства; модуль определения распределения движущей силы, выборочно определяющий распределение для любого из n двигателей-генераторов требуемой движущей силы на основе определяемых значений скорости вращения и требуемой движущей силы для обеспечения максимальной общей эффективности привода n двигателей-генераторов; и модуль переключения соединения, выборочно переводящий в состояние соединения любую из n схем переключателей, связанных с любыми выбранными двигателями-генераторами.
Настоящее устройство управления движущей силой позволяет выбирать двигатель-генератор из множества двигателей-генераторов соответствующим образом, в качестве двигателя-генератора, используемого как источник движущей силы в соответствии со скоростью вращения двигателей-генераторов и требуемой движущей силой. Таким образом, каждый раз, когда требуемая движущая сила может быть большой или малой, может быть обеспечен высокоэффективный привод выбранного двигателя-генератора. В результате можно улучшить общую эффективность привода двигателей-генераторов.
Предпочтительно устройство управления дополнительно включает в себя модуль определения угла поворота, определяющий угол поворота транспортного средства, и если на основе определяемого угла поворота будет принято решение, что транспортное средство движется прямо вперед, модуль определения распределения движущей силы выборочно определяет любой из двигателей-генераторов, которому будет выделена требуемая движущая сила, на основе значений скорости вращения и требуемой движущей силы.
Настоящее устройство управления движущей силой обеспечивает возможность выбора двигателя-генератора из множества двигателей-генераторов, соответствующим образом, в качестве двигателя-генератора, используемого в качестве источника движущей силы, когда транспортное средство движется прямо вперед. Это позволяет обеспечить стабильное движение транспортного средства, в то время как общая эффективность привода двигателей-генераторов может быть улучшена.
Предпочтительно, если будет принято решение на основе определяемого угла поворота, что транспортное средство поворачивает, модуль определения распределения движущей силы выборочно определяет любой из двигателей-генераторов, которому будет выделена требуемая движущая сила, на основе направления, в котором поворачивает транспортное средство.
Настоящее устройство управления движущей силой, когда транспортное средство поворачивает, позволяет выбирать двигатель-генератор, привод которого не следует осуществлять, из множества двигателей-генераторов, соответствующим образом, в соответствии с направлением, в котором поворачивает транспортное средство. Транспортное средство, таким образом, может плавно поворачивать. Это обеспечивает стабильность движения транспортного средства.
Настоящее изобретение, в котором используется конфигурация с приводом множества двигателей-генераторов от общей схемы привода, позволяет обеспечить устройство управления движущей силой с уменьшенными размерами, весом и стоимостью.
Кроме того, в такой конфигурации двигатель-генератор может быть выбран из множества двигателей-генераторов, соответствующим образом, в качестве двигателя-генератора, используемого в качестве источника движущей силы, в соответствии с тем, как в данный момент движется транспортное средство. Таким образом, каждый раз, когда требуемая движущая сила может быть большой или малой, можно обеспечить высокоэффективный привод выбранного двигателя-генератора. В результате можно улучшить общую эффективность привода двигателей-генераторов.
Кроме того, двигатель-генератор, привод которого не должен осуществляться, может быть выбран из множества двигателей-генераторов соответствующим образом, в соответствии с направлением, в котором движется транспортное средство. Таким образом, обеспечивается плавный поворот транспортного средства. Это обеспечивает стабильность движения транспортного средства.
Краткое описание чертежей
На фиг.1 схематично показана блок-схема, представляющая систему привода транспортного средства, на котором установлено устройство управления движущей силой для транспортного средства, в котором обеспечивается независимый привод модулей колес, в варианте воплощения настоящего изобретения.
На фиг.2 схематично показана блок-схема устройства управления движущей силой для транспортного средства, показанного на фиг.1.
На фиг.3 показана блок-схема функции ECU (устройства электрического управления), представленного на фиг.2.
На фиг.4 показана характеристика эффективности каждого из двигателей-генераторов MGR (правый двигатель-генератор), MGL (левый двигатель-генератор).
На фиг.5 показана характеристика эффективности каждого из двигателей-генераторов MGR, MGL.
На фиг.6 показана блок-схема последовательности операций, предназначенная для иллюстрации управления движущей силой для транспортного средства, в котором обеспечивается независимый привод модулей колес, в варианте воплощения настоящего изобретения.
На фиг.7 показана блок-схема последовательности операций, иллюстрирующая управление движущей силой для транспортного средства, в котором обеспечивается независимый привод модулей колес, согласно варианту воплощения настоящего изобретения.
На фиг.8 показана блок-схема, представляющая систему привода транспортного средства, на котором установлено устройство управления движущей силой для транспортного средства, в котором обеспечивается независимый привод модулей колес, согласно примеру варианта выполнения настоящего изобретения.
Подробное описание изобретения
Ниже будет более подробно описан вариант воплощения настоящего изобретения со ссылкой на чертежи. На чертежах одинаковыми ссылочными позициями обозначены идентичные или одинаковые компоненты.
На фиг.1 схематично показана блок-схема, представляющая систему привода транспортного средства, в котором установлено устройство управления движущей силой для транспортного средства, в котором обеспечивается независимый привод модулей колес, согласно варианту воплощения настоящего изобретения.
Как показано на фиг.1, транспортное средство 100 представляет собой, например, гибридное транспортное средство с приводом на четыре колеса. В гибридном транспортном средстве с приводом на четыре колеса применяется система, осуществляющая независимый привод двух модулей колес, которая осуществляет привод левого и правого модулей FL (передний левый), FR (передний правый) передних колес независимо двигателями - генераторами MGL, MGR, как левого, так и правого модулей RL (задний левый), RR (задний правый) задних колес двигателем ENG. Следует отметить, что здесь может применяться конфигурация привода левого и правого модулей RL, RR задних колес от другого устройства, кроме двигателя ENG, то есть от двигателя ENG и заднего двигателя-генератора, или от заднего двигателя - генератора через вал привода.
Кроме того, гибридное транспортное средство с приводом на четыре колеса может иметь другую конфигурацию, кроме конфигурации, представленной на фиг.1, то есть может иметь левый и правый модули FL, FR передних колес, привод которых осуществляется от двигателя ENG (и/или переднего двигателя - генератора), и левый и правый модули RL, RR задних колес с независимым приводом от двигателей-генераторов MGL, MGR. В качестве альтернативы, транспортное средство 100 может представлять собой электрическое транспортное средство системы, в которой осуществляется независимый привод двух модулей колес, в которой выполняется независимый привод либо левого и правого модулей FL, FR передних колес, или левого и правого модулей RL, RR задних колес от двигателей-генераторов MGL, MGR.
Транспортное средство 100 включает в себя двигатели-генераторы MGL, MGR, модуль (PCU) 1 управления мощностью, модуль (ECU) 3 электрического управления, батарею B, системное реле SR, двигатель ENG, трансмиссию 5, генератор 6 мощности, модули FL, FR, RL, RR колес и рычаг 7 управления.
Двигатели-генераторы MGL, MGR соединены с валами 8, 9, осуществляющими привод левого и правого модулей FL, FR передних колес, соответственно, и соответственно, выполняют их независимый привод. Двигатели-генераторы MGL, MGR представляют собой 3-фазные двигатели переменного тока и, например, представляют собой индукционные двигатели. В качестве двигателей-генераторов MGL, MGR применяются двигатели внутри колеса, встроенные в колеса их соответствующих модулей колес.
В двигателе ENG используется энергия сгорания бензина или аналогичного топлива в качестве источника движущей силы, которую, в свою очередь, разделяют на тракт передачи для генератора 6 мощности, генерирующего электроэнергию постоянного тока, и на передачу через трансмиссию 5 к валам, осуществляющим привод левого и правого модулей RL, RR задних колес. Генератор 6 мощности выполнен с возможностью электрического соединения через силовой кабель с батареей B для заряда батареи B.
Батарея B представляет собой никель-металлогидридную батарею, литий-ионную батарею или аналогичную аккумуляторную батарею, топливный элемент или тому подобное. Кроме того, батарея B может быть заменена устройством-накопителем электроэнергии, которое может быть воплощено как электрический конденсатор с двойным слоем или аналогичный конденсатор большой емкости. Между батареей B и модулем 1 управления мощностью расположено системное реле SR. Системным реле SR управляют в соответствии с сигналом SEB, поступающим из ECU 3, который переключает его в состояние проводимости и отключает из этого состояния.
Для двигателей-генераторов MGL, MGR предусмотрен общий модуль 1 управления мощностью, который интегрально управляет приводом двигателя-генератора MGL и приводом двигателя-генератора MGR. Это способствует тому, что система привода выполнена меньшей по размеру и весу, чем в обычным транспортном средстве с независимым приводом модулей колес, в котором предусмотрен модуль управления мощностью для каждого из двигателей-генераторов MGL, MGR. Модуль 1 управления мощностью включает в себя один преобразователь постоянного тока в переменный, который совместно используется двигателями-генераторами MGL, MGR, и повышающий преобразователь, преобразующей напряжение между преобразователем постоянного тока в переменный и батареей B, как будет описано ниже.
Транспортное средство 100 также включает в себя схемы SWL (левый переключатель), SWR (правый переключатель) переключателей, электрически соединяющие или отсоединяющие модуль 1 управления мощностью и двигатели-генераторы MGL, MGR, соответственно.
Схема SWL переключателя переводится в проводящее состояние или выводится из этого состояния в соответствии с сигналом SEL, вырабатываемым ECU 3, для электрического соединения или разъединения модуля 1 управления мощностью и двигателя MGL-генератора. Схема SWR переключателя переводится в проводящее состояние или выводится из него в ответ на сигнал SER, вырабатываемый ECU 3, для электрического соединения или разъединения модуля 1 управления мощностью и двигателя-генератора MGR. Схемы SWL, SWR переключателей выполнены, например, в виде реле.
Настоящее изобретение в варианте воплощения направлено на устройство управления движущей силой, которое обеспечивает возможность привода множества двигателей-генераторов MGL, MGR, совместное управление которыми осуществляется модулем 1 управления мощностью, и соответственно, на переключатели, переводящие схемы SWL, SWR переключателей в проводящее состояние/выводящие из проводящего состояния, что обеспечивает возможность выборочного привода, по меньшей мере, одного из двигателей-генераторов MGL, MGR. Схемы SWL, SWR переключателей переключаются, соответствующим образом, с помощью ECU 3, в зависимости от того, как движется транспортное средство 100, (то есть сколько движущей силы ему требуется, в каком направлении оно движется т.п.), как будет описано ниже. Другими словами, в зависимости от того, как оно движется, транспортное средство 100 будет выборочно выполнять перемещение с использованием, по меньшей мере, двух из модулей FL, FR, RL, RR колес, используемых как приводные модули колес, и перемещение с использованием одного из модулей FL, FR, RL, RR колес, в качестве приводного модуля колеса.
Транспортное средство 100 также включает в себя датчик 30 положения педали акселератора, определяющий положение AP педали акселератора, датчик 32 положения педали тормоза, определяющий положение BP педали тормоза, датчик 34 положения переключения передачи, определяющий положение SP передачи, датчик 36 угла поворота, определяющий угол θs поворота рычага 7 управления. Транспортное средство 100 также включает в себя датчики 40, 42, 44, 46 скорости модуля колеса, определяющие скорость вращения ωFL, ωFR, ωRL, ωRR модулей FL, FR, RL, RR колес. Эти сигналы определения датчиков поступают в ECU 3.
ECU 3 электрически соединен с двигателем ENG, трансмиссией 5, модулем 1 управления мощностью и батареей B и интегрально управляет требуемой работой двигателя ENG, требуемым приводом двигателей-генераторов MGR, MGL и требуемым зарядом батареи B. ECU 3 принимает сигналы определения от разных датчиков и на основе этих сигналов определения определяет, как транспортное средство 100 движется в данный момент времени, и в соответствии с тем, как транспортное средство 100 движется в данный момент времени, в соответствии с результатом детектирования, ECU 1 генерирует сигналы SEL, SR для перевода схем SWL, SWR переключателей в состояние проводимости/вывода из состояния проводимости, и подает эти сигналы в схемы SWL, SWR переключателей. Кроме того, ECU 3 генерирует сигнал PWMC, инструктирующий повышающий преобразователь, установленный в модуле 1 управления мощностью, о том, что требуется выполнить преобразование напряжения с его повышением или понижением, и выводит сгенерированный сигнал PWMC в повышающий преобразователь. Кроме того, ECU 3 генерирует сигнал PMWI, инструктирующий преобразователь постоянного тока в переменный, встроенный в модуль 1 управления мощностью, о том, что требуется преобразовать напряжение постоянного тока, поступающего с выхода повышающего преобразователя, в напряжение переменного тока для привода двигателя-генератора MGL и/или двигателя-генератора MGR, для осуществления привода, и выводит сгенерированный сигнал PWMI в преобразователь постоянного тока в переменный. Кроме того, ECU 3 генерирует сигнал PMWI, инструктирующий преобразователь постоянного тока в переменный, о том, что требуется преобразовать напряжение переменного тока, генерируемое двигателем-генератором MGL и/или двигателем-генератором MGR, в напряжение постоянного тока, и вернуть напряжение постоянного тока в повышающий преобразователь для регенерирования энергии, и ECU 3 выводит сгенерированный сигнал PWMI в преобразователь постоянного тока в переменный.
На фиг.2 показана блок-схема устройства управления движущей силой в транспортном средстве 100, представленном на фиг.1.
Как показано на фиг.2, устройство управления движущей силой включает в себя батарею B, модуль управления мощностью 1, двигатели-генераторы MGR, MGL, системное реле SR1, SR2, схемы SWR, SWL переключателей, ECU 3, датчик 10 напряжения и датчики 11, 24, 28 тока.
Двигатели-генераторы MGR, MGL представляют собой 3-фазные двигатели переменного тока (например, индукционные двигатели), и их привод осуществляется электроэнергией, запасенной в батарее B. Движущую силу двигателя-генератора MGR передают через редуктор скорости на вал (не показан), осуществляющий привод правого модуля FR переднего колеса (не показан). Движущую силу двигателя-генератора MGL передают через редуктор скорости на вал (не показан), осуществляющий привод левого модуля FL переднего колеса (не показан). Таким образом, двигатели-генераторы MGR, MGL помогают двигателю ENG при движении транспортного средства 100 или обеспечивают движение транспортного средства 100, используя только свою движущую силу.
Кроме того, когда транспортное средство 100 осуществляет торможение в регенеративном режиме, двигатели-генераторы MGR, MRL вращаются через редуктор скорости модулями FR, FL передних колес, соответственно, работая как генераторы энергии, для регенерирования энергии, которая в свою очередь заряжает батарею B через модуль 1 управления мощностью.
Модуль 1 управления мощностью включает в себя преобразователь 14 постоянного тока в переменный, общий для двигателей-генераторов MGR, MGL, повышающий преобразователь 12, сглаживающие конденсаторы C1, C2 и датчик 13 напряжения.
Повышающий преобразователь 12 включает в себя дроссель L1, транзисторы Q1, Q2 NPN типа и диоды D1, D2. Один конец дросселя L1 соединен с линией питания батареи B, и другой его конец соединен с промежуточной точкой между NPN транзистором Q1 и NPN транзистором Q2, то есть между эмиттером NPN транзистора Q1 и коллектором NPN транзистора Q2. NPN транзисторы Q1, Q2 последовательно включены между линией питания и линией земли. Коллектор NPN транзистора Q1 соединен с линией питания, и эмиттер NPN транзистора Q2 соединен с линией земли. Кроме того, диод D1 включен между коллектором и эмиттером NPN транзистора Q1, который пропускает ток от эмиттера к коллектору, и диод D2 который включен между коллектором и эмиттером NPN транзистора Q2, который пропускает ток от эмиттера в коллектор.
Преобразователь 14 постоянного тока в переменный сформирован из плеча 15 фазы U, плеча 16 фазы V и плеча 17 фазы W. Плечо 15 фазы U, плечо 16 фазы V и плечо 17 фазы W включены параллельно между линией питания и линией земли.
Плечо 15 фазы U сформировано последовательно подключенными NPN транзисторами Q3, Q4. Плечо 16 фазы V сформировано последовательно подключенными NPN транзисторами Q5, Q6. Плечо 17 фазы W сформировано последовательно подключенными NPN транзисторами Q7, Q8. Кроме того, диод D3 подключен между коллектором и эмиттером NPN транзистора Q3 для того, чтобы пропускать ток от эмиттера к коллектору. Диод D4 подключен между коллектором и эмиттером NPN транзистора Q4, для того чтобы пропускать ток от эмиттера к коллектору. Диод D5 подключен между коллектором и эмиттером NPN транзистора Q5, для того, чтобы пропускать ток от эмиттера к коллектору. Диод D6 подключен между коллектором и эмиттером NPN транзистора Q6, для того чтобы пропускать ток от эмиттера к коллектору. Диод D7 подключен между коллектором и эмиттером NPN транзистора Q7, для того чтобы пропускать ток от эмиттера к коллектору. Диод D8 подключен между коллектором и эмиттером NPN транзистора Q8, для того чтобы пропускать ток от эмиттера к коллектору.
Каждое фазное плечо имеет промежуточную точку, подключенную к концу фазной катушки двигателя-генератора MGR через схему SWR переключателя. Другими словами, двигатель-генератор MGR имеет три фазные катушки U, V, W, один соответствующий конец каждой их которых подключен к нейтральной точке. Другой конец фазной катушки U подключен к промежуточной точке между NPN транзисторами Q3, Q4. Другой конец фазной катушки V подключен к промежуточной точке между NPN транзисторами Q5, Q6. Другой конец фазной катушки W подключен к промежуточной точке между NPN транзисторами Q7, Q8.
Кроме того, промежуточная точка каждого фазного плеча подключена к концу фазной катушки двигателя-генератора MGL через схему SWL переключателя. Другими словами, двигатель-генератор MGL имеет три фазные катушки U, V, W, с их соответствующими концами, соединенными с нейтральной точкой. Другой конец фазной катушки U подключен к промежуточной точке между NPN транзисторами Q3, Q4. Другой конец фазной катушки V подключен к промежуточной точке между NPN транзисторами Q5, Q6. Другой конец фазной катушки W подключен к промежуточной точке между NPN транзисторами Q7, Q8.
Батарея B представляет собой никель-металлогидридную батарею, литий-ионную батарею или аналогичную аккумуляторную батарею. Датчик 10 напряжения определяет напряжение Vb постоянного тока, поступающее из батареи B, и выводит определяемое постоянное напряжение Vb в ECU 3. Датчик 11 тока определяет постоянный ток Ib, протекающий от батареи B, и выводит определяемое значение постоянного тока Ib в ECU 3.
Конденсатор C1 принимает постоянное напряжение Vb от батареи B, сглаживает принятое постоянное напряжение Vb и подает сглаженное постоянное напряжение Vb в повышающий преобразователь 12.
Повышающий преобразователь 12 принимает постоянное напряжение Vb от конденсатора C1, преобразует с повышением принятое постоянное напряжение и передает преобразованное с повышением постоянное напряжение в конденсатор C2. Более конкретно, когда повышающий преобразователь 12 принимает сигнал PWMC из ECU 3, повышающий преобразователь 12 преобразует с повышением постоянное напряжение Vb в соответствии с периодом, в течение которого NPN транзистор Q2 включен по сигналу PWMC, и повышающий преобразователь 12 передает преобразованное с повышением постоянное напряжение Vb в конденсатор C2.
Кроме того, когда повышающий преобразователь 12 принимает сигнал PWMC из ECU 3, повышающий преобразователь 12 выполняет преобразование с понижением постоянного напряжения, переданного от преобразователя 14 постоянного тока в переменный через конденсатор C2, и подает преобразованное с понижением постоянное напряжение для заряда батареи B.
Конденсатор C2 принимает постоянное напряжение от повышающего преобразователя 12, сглаживает принятое постоянное напряжение и передает сглаженное постоянное напряжение в преобразователь 14 постоянного тока в переменный. Датчик 20 напряжения определяет напряжение на конденсаторе C2, то есть выходное напряжение Vm от повышающего преобразователя 12, которое соответствует входному напряжению преобразователя 14 постоянного тока в переменный, и это значение затем также поддерживается, и датчик 20 напряжения выводит определяемое значение напряжения Vm в ECU 3.
Когда преобразователь 14 постоянного тока в переменный принимает постоянное напряжение от батареи B через конденсатор C2, преобразователь 14 постоянного тока в переменный работает в соответствии с сигналом PWMI, принятым от ECU 3, для преобразования постоянного напряжения в переменное напряжение, для привода двигателя-генератора MGR и/или двигателя-генератора MGL. Таким образом, осуществляется привод двигателя-генератора MGR и/или двигателя-генератора MGL, которые генерируют крутящий момент в соответствии с требуемым крутящим моментом привода.
Кроме того, когда транспортное средство 100 выполняет торможение в регенеративном режиме, преобразователь 14 постоянного тока в переменный преобразует переменный ток, который генерируется двигателем-генератором MGR и/или двигателем-генератором MGL, в постоянной ток, в соответствии с сигналом PWMI, переданным из ECU 3, и преобразователь 14 постоянного тока в переменный ток передает постоянное напряжение через конденсатор C2 в повышающий преобразователь 12. Следует отметить, что отмеченное здесь торможение в регенеративном режиме включает в себя: торможение, сопровождаемое генерированием энергии, когда водитель транспортного средства 100 нажимает на педаль тормоза; без нажима на педаль тормоза, когда он отпускают педаль акселератора при движении транспортного средства для снижения скорости движения (или для прекращения ускорения) при регенерирования энергии; и т.п.
Датчик 24 тока определяет ток MCRTR двигателя, протекающий в двигатель-генератор MGR, и выводит определяемое значение тока MCRTR двигателя в ECU 3. Датчик 28 тока определяет ток MCRTL двигателя, протекающий в двигатель-генератор MGL, и выводит определяемое значение тока MCRTL двигателя в ECU 3.
ECU 3 принимает положение AP педали акселератора от датчика 30 положения педали акселератора (не показан), положение BP педали торможения от датчика 32 положения педали торможения (не показан), положение SP передачи от датчика 34 положения передачи (не показан), угол θs поворота рычага 7 управления от датчика 36 угла поворота (не показан), и значение скорости ωFL, ωFR, ωRL, ωRR вращения модулей FL, FR, RL, RR колес от датчиков 40, 42, 44, 46 скорости модулей колес (не показаны). Кроме того, ECU 3 принимает значение постоянного напряжения Vb от датчика 10 напряжения, значение выходного напряжения Vm повышающего преобразователя 12 (то есть входного напряжения преобразователя 14 постоянного тока в переменный) от датчика 13 напряжения, значение тока MCRTR двигателя от датчика 24 тока, и значение тока MCRTL двигателя от датчика 28 тока.
ECU 3 рассчитывает крутящий момент, который должно генерировать транспортное средство 100 (ниже также называется "требуемым крутящим моментом") на основе положения AP педали акселератора, положения BP педали торможения, положения SP передачи и скорости движения. Скорость движения представляет собой, например, среднее значение скоростей ωFL, ωFR, ωRL, ωRR вращения модулей FL, FR, RL, RR колес.
После этого по расчетному значению требуемого крутящего момента ECU 3 рассчитывает крутящие моменты, которые должны индивидуально выводить четыре модуля FR, FL, RR, RL колес, соответственно (ниже также называются "соответствующие индивидуально требуемые крутящие моменты модулей колес"). Соответствующие индивидуально требуемые значения крутящего момента модулей колес, рассчитывают, например, путем определения распределения крутящего момента между четырьмя модулями FR, FL, RR, RL колес, на основе значений скорости ωFL, ωFR, ωRL, ωRR вращения модулей FL, FR, RL, RR колес и угла θs поворота рычага 7 управления, и расчета соответствующих индивидуально требуемых значений крутящего момента модулей колес по определенным значениям распределения и требуемого крутящего момента.
Таким образом, для получения значений индивидуально требуемых крутящих моментов, которые должны индивидуально выводить модуль FR правого переднего колеса и модуль FL левого переднего колеса, привод которых независимо осуществляется с помощью двигателей-генераторов MGR и MGL, ECU 1 определяет распределение крутящего момента между модулем FR правого переднего колеса и модулем FL левого переднего колеса, используя способ, описанный ниже, на основе суммы требуемых значений крутящих моментов модулей FL, FR правого и левого передних колес и скорости вращения двигателей-генераторов MGR, MGL, для обеспечения максимальной общей эффективности привода двигателей-генераторов MGR и MGL.
Следует отметить, что общая эффективность привода двигателей-генераторов означает отношение суммы движущих сил, генерируемых двигателями-генераторами MGR и MGL, соответственно, (то есть крутящего момента, умноженного на количество оборотов) к суммарной величине электроэнергии, подаваемой к двигателям-генераторам MGR и MGL, соответственно. Другими словами, обеспечение максимальной общей эффективности привода двигателей-генераторов соответствует минимальному суммарному значению электроэнергии, подаваемой к двигателям-генераторам, когда сумма крутящих моментов двигателей-генераторов удовлетворяет крутящему моменту, который должны выводить модули левого и правого передних колес.
Таким образом, в варианте воплощения настоящего изобретения, когда должен быть выведен требуемый крутящий момент, и если будет принято решение, что привод обоих двигателей-генераторов, MGR и MGL, вместо привода только одного из двигателей-генераторов MGR и MGL, обеспечивает максимальную общую эффективность привода двигателей-генераторов, тогда определяется распределение крутящего момента между модулем FR правого переднего колеса и модулем FL левого переднего колеса для привода обоих двигателей-генераторов MGR и MGL.
В отличие от этого, если будет принято решение, что привод только одного из двигателей-генераторов MGR и MGL, вместо привода обоих двигателей-генераторов MGR и MGL, обеспечивает общую максимальную эффективность привода двигателей-генераторов, тогда распределение крутящего момента между модулем FR правого переднего колеса и модулем FL левого переднего колеса определяется так, что будет осуществляться привод только одного из двигателей-генераторов MGR и MGL.
Если осуществляется привод обоих двигателей-генераторов MGR и MGL, тогда ECU 3 генерирует сигналы SER, SEL для перевода обеих схем SWR, SWL переключателей в проводящее состояние, и выводит сгенерированные сигналы SER и SEL в схемы SWR и SWL переключателей, соответственно. Если осуществляется привод одного из двигателей-генераторов, MGR и MGL, тогда ECU 3 генерирует сигналы SER, SEL для перевода в проводящее состояние одной из схем SWR и SWL переключателей, которая соответствует двигателю-генератору, привод которого должен осуществляться, и переводит другую одну из схем SWR и SWL переключателей в состояние отсутствия проводимости, и выводит сгенерированные сигналы SET, SEL в схемы SWR, SWL переключателей, соответственно.
После этого ECU 3 использует способ, описанный ниже, для генерирования сигнала PWMI на основе индивидуально требуемых значений крутящих моментов привода соответствующих модулей FL и FR правого и левого передних колес, который определяется для управления NPN транзисторами Q3-Q8 преобразователя 14 постоянного тока в переменный для их переключения, когда преобразователь 14 постоянного тока в переменный осуществляет привод двигателя-генератора MGR/или двигателя-генератора MGL, и ECU 3 выводит сгенерированный сигнал PWMI в преобразователь 14 постоянного тока в переменный.
Кроме того, когда преобразователь 14 постоянного тока в переменный осуществляет привод двигателя-генератора MGR и/или двигателя-генератора MGL, ECU 3 использует способ, описанный ниже, для генерирования сигнала PWMC на основе постоянного напряжения Vb и выводит напряжение Vm для управления NPN транзисторами Q1, Q2 повышающего преобразователя 12 для их переключения, и ECU 3 выводит сгенерированный сигнал PWMC в повышающий преобразователь 12.
Кроме того, ECU 3 управляет работой двигателя ENG и передаточным числом трансмиссии 5 в соответствии с индивидуально требуемыми значениями крутящих моментов привода модулей RR и RL правого и левого задних колес.
На фиг.3 показана блок-схема функции ECU 3, показанного на фиг.2.
Как показано на фиг.3, ECU 3 включает в себя модуль 301 расчета требуемой движущей силы для транспортного средства, модуль 302 определения распределения движущей силы, модуль 303 переключателя соединения, модуль 304 преобразования инструкции тока, модуль 305 управления током, модуль 306 генерирования PWM, модуль 307 преобразования инструкции напряжения, модуль 308 расчета коэффициента включения преобразователя, и модуль 309 генерирования PWM преобразователя.
Модуль 301 расчета требуемой движущей силы транспортного средства рассчитывает требуемое значение крутящего момента T* привода, который должно вырабатывать транспортное средство 100, на основе положения AP педали акселератора, положения BP педали торможения, положения SP передачи и скорости движения. Скорость движения представляет собой, например, среднее значение скоростей вращения ωFL, ωFR, ωRL, ωRR модулей колес FL, FR, RL, RR.
Модуль 302 определения распределения движущей силы рассчитывает по рассчитанному значению требуемого крутящего момента T* привода соответствующие, индивидуально требуемые значения крутящего момента TFR*, TFL*, TRR* TRL* привода для четырех модулей FR, FL, RR, RL колес. Это выполняется, например, путем определения распределения крутящего момента привода для четырех модулей колес FR, FL, RR, RL на основе значений скорости вращения ωFL, ωFR, ωRL, ωRR модулей FL, FR, RL, RR колес и угла θs поворота, заданного рычагом 7 управления, и расчета индивидуально требуемых крутящих моментов привода модулей соответствующих колес по определенному распределению требуемого крутящего момента T*.
При этом для отдельных требуемых значений крутящих моментов TFR*, TFL* привода, которые должны индивидуально выводить правый модуль FR переднего колеса и левый модуль FL переднего колеса при независимом приводе от двигателей-генераторов MGR и MGL, соответственно, модуль 302 определения распределения движущей силы определяет распределение крутящего момента привода между правым модулем FR переднего колеса и левым модулем FL переднего колеса на основе значений крутящего момента TF*, которые должны выводить правый и левый модули FR, FL передних колес, и скорости вращения ωFR, ωFL двигателей-генераторов MGR и MGL для обеспечения максимальной общей эффективности привода двигателей-генераторов MGR и MGL.
Более конкретно, модуль 302 определения распределения движущей силы сравнивает эффективность привода обоих двигателей-генераторов MGR и MGL для вывода требуемого крутящего момента TF* с эффективностью привода только одного из двигателей-генераторов MGR и MGL для вывода требуемого крутящего момента TF* привода на основе характеристики эффективности двигателей-генераторов MGR, MGL.
На фиг.4 показана характеристика эффективности каждого из двигателей-генераторов MGR, MGL. На чертеже кривая LN1 обозначает взаимозависимость, которую имеет двигатель-генератор MGR, MGL между выходным крутящим моментом и скоростью вращения. На Фиг.4 наибольшая эффективность наблюдается в точке X1, и постепенно понижается через уровни X2, X3, X4 к наименьшему значению на уровне X5.
Здесь, в качестве одного примера для иллюстрации, транспортное средство 100 движется при вращении обоих двигателей-генераторов MGR, MGL, со скоростью ω1, когда операция водителя требует, чтобы правые и левые модули FR, FL передних колес выводили требуемое значение крутящего момента TF* привода.
Требуемое значение крутящего момента TF* привода и скорость ω1 вращения сопоставлены на характеристики эффективности, показанной на фиг.4. Если приводят оба двигателя-генератора MGR, MGL так, что каждый из них выводит крутящий момент TF*/2, эффективность будет равна X5, что обозначено на чертеже точкой P2. В отличие от этого, если только один из двигателей-генераторов MGR, MGL будет приведен со значением выходного крутящего момента TF*, тогда эффективность повышается до уровня X4, как обозначено на чертеже точкой P1.
Другими словами, для относительно малых значений требуемого крутящего момента TF* привода, например, при движении по городу с низкой скоростью, принимается решение о том, что привод только одного из двигателей-генераторов MGR, MGL позволяет обеспечить максимальную общую эффективность привода двигателей-генераторов. В соответствии с этим, в данном случае, модуль 302 определения распределения движущей силы определяет соответствующие, индивидуально требуемые значения крутящих моментов TFR*, TFL* привода правого и левого модулей FR, FL передних колес, обеспечивая то, что один и другой из двигателей-генераторов MGR, MGL будут выводить крутящий момент TF* и крутящий момент, равный нулю, соответственно.
В отличие от этого для относительно большого требуемого значения крутящего момента TF* привода, как показано на фиг.5, можно видеть, что, когда только один из двигателей-генераторов MGR, MGL приводят для вывода крутящего момента TF*, получают эффективность X3, которая обозначена точкой P3, и когда оба двигателя-генератора MGR, MGL приводят для вывода каждым из них крутящего момента TF*/2, как обозначено на чертеже в точке P4, получают более высокую эффективность X2.
Таким образом, для относительно большого требуемого крутящего момента TF* привода, например, когда происходит ускорение при движении с высокой скоростью, принимается решение о том, что привод обоих двигателей-генераторов MGR и MGL может повысить общую эффективность привода двигателей-генераторов. В этом случае модуль 302 определения распределения движущей силы определяет распределение крутящего момента привода между правым модулем FR переднего колеса и левым модулем FL переднего колеса на основе требуемого крутящего момента TF* привода и значений скорости ωFR, ωFL вращения двигателей-генераторов MGR, MGL.
Таким образом, модуль 302 определения распределения движущей силы выбирает двигатель-генератор из множества двигателей-генераторов MGR, MGL, который используется как источник движущей силы, соответствующим образом, на основе требуемого крутящего момента TF* привода и значений скорости ωFR, ωFL вращения двигателей-генераторов MGR, MGL. Это позволяет обеспечить высокую эффективность привода каждого выбранного двигателя-генератора, независимо от того, является ли требуемое значение движущей силы TF* большим или малым. В результате повышается общая эффективность транспортного средства в целом.
Однако если транспортное средство 100 поворачивает при приводе обоих двигателей-генераторов MGR, MGL с правым и левым модулями FR, FL передних колес, которые вращаются с разными скоростями ωFR, ωFL, модули колес выводят крутящие моменты с разностью, соответствующей разности их скоростей вращения, в результате чего ухудшается способность транспортного средства 100 выполнять поворот.
В соответствии с этим, если будет принято решение путем установки угла θs поворота с помощью рычага 7 управления, значение которого поступает от датчика 36 угла поворота, о том, что транспортное средство 100 в настоящее время поворачивает, модуль 302 определения распределения движущей силы определяет распределение крутящего момента привода между правым модулем FR переднего колеса и левым модулем FL переднего колеса на основе направления поворота транспортного средства, осуществляя привод одного из двигателей-генераторов MGR, MGL, для того чтобы обеспечить плавный поворот транспортного средства 100.
Более конкретно, если буде принято решение на основе угла θs поворота, установленного с помощью рычага 7 управления, о том, что транспортное средство 100 в настоящее время поворачивает вправо, тогда модуль 302 определения распределения движущей силы определяет распределение крутящего момента привода между правым и левым модулями FR, FL передних колес так, чтобы осуществлять привод только модуля колеса, расположенного снаружи направления, в котором поворачивает транспортное средство, то есть левого модуля FL переднего колеса, и при этом модуль колеса, расположенного внутри относительно направления, в котором поворачивает транспортное средство, то есть правый модуль FR переднего колеса, находится в режиме холостого хода.
Кроме того, если будет принято решение на основе угла θs поворота, установленного с помощью рычага 7 управления, о том, что транспортное средство 100 в настоящее время поворачивает налево, тогда модуль определения 302 распределение движущей силы определяет распределение крутящего момента привода между правым и левым модулями FR, FL передних колес для того, чтобы осуществлять привод только модуля колеса, расположенного снаружи относительно направления, в котором поворачивает транспортное средство, то есть правого модуля FR переднего колеса, и оставляет модуль колеса, расположенный внутри относительно направления, в котором поворачивает транспортное средство, то есть левого модуля FL переднего колеса, в режиме холостого хода.
Затем модуль 302 определения распределения движущей силы рассчитывает соответствующие, индивидуально требуемые значения крутящих моментов TFR*, TFL* привода правого и левого модулей переднего колеса, по определенному распределению и требуемому крутящему моменту TF* привода, и модуль 302 определения распределения движущей силы выводит соответствующие, индивидуально требуемые значения крутящих моментов TFR*, TFL* привода модулей колеса, в том виде, как они рассчитаны, в модуль 303 переключения соединения, модуль 304 преобразования инструкции тока и модуль 307 преобразования инструкции напряжения. Модуль 303 переключения соединения принимает соответствующие, индивидуально требуемые значения крутящих моментов TFR*, TFL* привода модулей колеса, из модуля 302 определения распределения движущей силы, и модуль 303 переключателя соединения генерирует сигналы SER, SEL, на его основе для переключения схем SWR, SWL переключателей в проводящее состояние/вывода из проводящего состояния, и выводит эти сигналы в схемы SWR, SWL переключателей, соответственно.
Более конкретно, если ни одно из соответствующих, индивидуально требуемых значений крутящих моментов TFR*, TFL* привода модулей колес не равно нулю, то есть если осуществляется привод двигателей-генераторов MGR, MGL, тогда модуль 303 переключателя соединения генерирует сигналы SER, SEL для перевода обеих схем SWR и SWL переключателей в состояние проводимости и выводит сгенерированные сигналы SER, SEL в схемы SWR, SWL переключателей, соответственно. Таким образом, каждый из двигателей-генераторов MGR, MGL электрически соединен с преобразователем 14 постоянного тока в переменный, и ток привода двигателя будет поступать в каждую фазную катушку от преобразователя 14 постоянного тока в переменный.
В отличие от этого, если одно из значений соответствующих индивидуально требуемых крутящих моментов TFR*, TFL* модулей колес, равно нулю, то есть если только один из двигателей-генераторов MGR, MGL приводят в движение, тогда модуль 303 переключения соединения генерирует сигнал, SER, SEL для перевода состояния проводимости одной из схем SWR (или SWL) переключателей, соответствующей этому двигателю-генератору, который приводится в движение, и переключает другую схему SWL (или SWR) переключателя, выводя ее из состояния проводимости, и выводит сгенерированные сигналы SER, SEL в схемы SWR, SWL переключателей, соответственно. Таким образом, только один из двигателей-генераторов MGR, MGL будет электрически подключен к преобразователю 14 постоянного тока в переменный, и ток привода двигателя будет подан в каждую фазную катушку. Поскольку другой из двигателей-генераторов MGR, MGL электрически отключен от преобразователя 14 постоянного тока в переменный, подача тока привода двигателя будет прекращена.
Следует отметить, что, если привод осуществляется только от одного из двигателей-генераторов MGR, MGL, постоянный привод одного двигателя-генератора может быть заменен поочередным приводом двигателей-генераторов MGR, MGL в течение каждого заданного периода времени. Это может быть выполнено путем перевода схем SWR, SWL переключателей в проводящее состояние поочередно в течение каждого заданного периода времени.
Таким образом, преобразователь 14 постоянного тока в переменный и двигатели-генераторы MGR, MGL электрически соединяются/отсоединяются на основе соответствующих, индивидуально требуемых значений крутящих моментов TFR*, TFL* привода модулей колес, и впоследствии преобразователем постоянного тока в переменный 14 управляют так, чтобы обеспечить вывод двигателями-генераторами MGR, MGL крутящего момента в соответствии с соответствующими, определенными, индивидуально требуемыми значениями крутящих моментов TFR*, TFL* привода модулей колес.
Более конкретно, модуль 304 преобразования инструкции тока рассчитывает первичное значение тока (соответствует сумме тока для возбуждения и тока для генерирования крутящего момента), которое представляет собой целевое значение, которое контролируют для осуществления управления вектором, и частоты тока проскальзывания, на основе соответствующих, индивидуально требуемых, определенных значений крутящих моментов TFR*, TFL* модулей колес, и скоростей ωFR, ωFL вращения двигателей-генераторов MGR, MGL. Такой расчет выполняют в соответствии с хорошо известной системой управления вектором. Затем, по рассчитанному значению первичного тока и частоте угла проскальзывания модуль 304 преобразования инструкции тока рассчитывает инструкции iu*, iv*, iw* тока для фаз двигателя-генератора MGR и/или двигателя-генератора MGL, и выводит рассчитанные инструкции iu*, iv*, iw* тока в модуль 305 управления током.
Следует отметить, что в последовательности расчетов, выполняемой для обоих двигателей-генераторов MGR, MGL, используется среднее значение скоростей ωFR, ωFL вращения двигателей-генераторов MGR, MGL. Если осуществляется привод только одного из двигателей-генераторов MGR, MGL, используется скорость ωFR или ωFL вращения одного из двигателей-генераторов, привод которого осуществляется.
Модуль 305 управления током принимает инструкции iu*, iv*, iw* тока трех фаз из модуля 304 преобразования инструкции тока и принимает значения токов MCRTR, MCRTL двигателей от датчиков 24, 28 тока. Модуль 305 управления током выполняет управление с обратной связью таким образом, что значения iu, iv, iw определения тока трех фаз, обозначенные в токе MCRTR двигателя, и/или в токе MCRTL двигателя, соответствовали инструкциям iu*, iv*, iw* тока для трех фаз. Более конкретно, модуль 305 управления током рассчитывает величину напряжения, которую требуется контролировать Vu*, Vv*, Vw*, для регулирования тока двигателя по отклонениям между значением iu, iv, iw определения тока и инструкциями iu*, iv*, iw* тока, и выводит рассчитанные значения Vu*, Vv*, Vw* напряжения, которые требуется контролировать, в модуль 306 генерирования PWM.
Модуль 306 генерирования PWM принимает значения Vu, Vv, Vw напряжения, которыми требуется управлять, из модуля 305 управления током, и напряжение Vm из датчика 13 напряжения, и генерирует сигнал PWMI как зависимый от него, и выводит сгенерированный сигнал PWMI в преобразователь 14 постоянного тока в переменный.
Таким образом, преобразователь 14 постоянного тока в переменный управляет каждым транзистором Q3-Q8 в соответствии с сигналом PWMI, принятым из модуля 306 генерирования PWM, для переключения, для управления током, поступающим в каждую фазу двигателей-генераторов MGR, MGL, что обеспечивает возможность для двигателей-генераторов MGR, MGL выводить соответствующие, обозначенные индивидуально требуемые значения крутящих моментов TR*, TL* привода модулей колес.
Таким образом, током привода двигателя управляют и двигатели-генераторы MGR, MGL выводят крутящие моменты, обозначенные в соответствующих, индивидуально требуемых значениях крутящих моментов TFR*, TFL* модулей колес.
Следует отметить, что, если одно из соответствующих, индивидуально требуемых значений крутящих моментов TFR*, TFL* привода модулей колес равно нулю, например, если TFR*=0, тогда связанный с ним двигатель-генератор MGR и преобразователь 14 постоянного тока в переменный электрически разъединяются схемой SWR переключателя, и прекращается подача тока, осуществляющего привод двигателя, в двигатель-генератор MGR. В результате, правый модуль FR переднего колеса, соединенный с двигателем-генератором MGR, работает в режиме свободного качения.
Кроме того, параллельно с выполняемым, таким образом, управлением током привода двигателя, когда напряжение, требуемое для привода двигателя-генератора MGR и/или двигателя-генератора MGL, то есть напряжение привода двигателей определяют по соответствующим, индивидуально требуемым, определенным значениям крутящих моментов TFR*, TFL* привода модулей колес и по значениям скорости ωFR, ωFL вращения двигателей-генераторов MGR, MGL, ECU 1 управляет операцией преобразования напряжения повышающего преобразователя 12 таким образом, чтобы напряжение Vm, вводимое в преобразователь 14 постоянного тока в переменный, соответствовало заданному напряжению привода двигателя.
Более конкретно, модуль 307 преобразования инструкции напряжения определяет оптимальное (или целевое) значение напряжения, поступающего в преобразователь постоянного тока в переменный, то есть, значение Vdc_com инструкции напряжения для повышающего преобразователя 12 на основе соответствующих, индивидуально требуемых значений крутящих моментов TR*, TL* привода модулей колес, полученных из модуля 302 определения распределения движущей силы и скоростей ωFR, ωFL вращения двигателей-генераторов MGR, MGL, и выводит определенное значение Vdc_com инструкции напряжения в модуль 308 расчета коэффициента работы преобразователя.
Когда модуль 308 расчета коэффициента работы преобразователя принимает значение Vdc_com инструкции напряжения из модуля 307 преобразования инструкции напряжения, и значение постоянного напряжения Vb от датчика 10 напряжения, модуль расчета 308 коэффициента работы преобразователя рассчитывает коэффициент работы по значению постоянного напряжения Vb для установки напряжения Vm, подаваемого на вход преобразователя 14 постоянного тока в переменный, в значении Vdc_com инструкции напряжения. Модуль 308 расчета коэффициента работы преобразователя выводит рассчитанный коэффициент работы в модуль 309 генерирования PWM преобразователя.
Модуль 309 генерирования PWM преобразователя использует коэффициент работы, принятый из модуля 308 расчета коэффициента работы преобразователя, для генерирования сигнала PWMC для включения/выключения NPN транзисторов Q1, Q2 повышающего преобразователя 12, и выводит сгенерированный сигнал PWMC в повышающий преобразователь 12.
На фиг.6 и 7 показана блок-схема последовательности операций, предназначенная для иллюстрации управления движущей силой транспортного средства, в котором осуществляется независимый привод модулей колес, в варианте воплощения настоящего изобретения.
Как показано на фиг.6, вначале информация об операции, выполняемой водителем, такая как положение AP педали акселератора, положение SP передачи, положение BP педали торможения и угол θs поворота, поступает от различных датчиков в ECU 3 (этап S01), и модуль 301 расчета требуемой движущей силы транспортного средства использует входные сигналы, поступившие от датчиков, для расчета требуемого крутящего момента T* привода, который должно вырабатывать транспортное средство 100 (этап S02).
Затем модуль 302 определения распределения движущей силы определяет распределение движущей силы для правого модуля FR переднего колеса и левого модуля FL переднего колеса на основе крутящего момента TF* привода расчетного требуемого значения крутящего момента T* привода, которые должны генерировать правый и левый модули FR, FL передних колес в целом, скорости ωFR, ωFL вращения двигателей-генераторов MGR, MGL и угла θs поворота заданной рычагом 7 управления.
Более конкретно, первоначально, модуль 302 определения распределения движущей силы определяет по значению угла θs поворота, заданного рычагом 7 управления, поступившего от датчика 36 угла поворота, движется ли транспортное средство 100 прямо вперед (этап S02). Если угол θs поворота имеет не более, чем заданное значение, модуль 302 определения распределения движущей силы определяет, что транспортное средство 100 движется прямо, и переходит к этапу S04. Если угол θs поворота превышает заданное значение, тогда модуль 302 определения распределения движущей силы определяет, что транспортное средство 100 поворачивает, и переходит к этапу S11, показанному на фиг.7, описанной ниже.
Затем на этапе S03, если будет принято решение, что транспортное средство 100, движется прямо вперед, модуль 302 определения распределения движущей силы определяет распределение крутящего момента привода между правым модулем FR переднего колеса и левым модулем FL переднего колеса на основе требуемого значения крутящего момента T* привода и скорости вращения двигателей-генераторов MGR, MGL для обеспечения максимальной общей эффективности привода двигателей-генераторов MGR и MGL (этап S04).
Более конкретно, модуль 302 определения распределения движущей силы имеет заранее сохраненную в виде карты характеристику эффективности двигателей-генераторов MGR, MGL, представленную на фиг.4 (зависимость между выходным значением крутящего момента, скоростью вращения и эффективностью) и обращается к этой карте для определения распределения крутящего момента привода, которое обеспечивает максимальную общую эффективность привода двигателей-генераторов. Модуль 302 определения распределения движущей силы затем использует определенное распределение и требуемое значение крутящего момента T* привода для расчета соответствующих, индивидуально требуемых значений крутящих моментов TFR*, TFL* привода для модулей колес.
После того, как будут рассчитаны соответствующие, индивидуально требуемые значения крутящих моментов TFR*, TFL* привода модулей колес, модуль 303 переключения соединения рассчитывает на их основе сигналы SER, SEL для перевода схем SWR, SWL переключателей в состояние проводимости/вывода из состояния проводимости, и передает эти сигналы в схемы SWR, SWL переключателей, соответственно.
Более конкретно, если на этапе S05 одно из соответствующих значений индивидуально требуемых крутящих моментов TFR*, TFL* привода модулей колес является положительным или отрицательным, и другое значение равно нулю, тогда модуль 303 переключения соединения определяет, что требуется осуществлять привод только одного из двигателей-генераторов MGR, MGL, и модуль 303 переключения соединения генерирует сигналы SER, SEL для перевода в проводящее состояние одной из схем SWR и SWL переключателей, которая соответствует двигателю-генератору, привод которого требуется осуществлять, и перевода другой схемы переключателя в состояние отсутствия проводимости, и модуль 303 переключения соединения выводит сгенерированные сигналы в схемы SWR, SWL переключателей (этап S06).
Если на этапе S05 соответствующие, индивидуально требуемые значения крутящих моментов TFR*, TFL* привода модулей колес оба являются положительными или отрицательными, тогда модуль 303 переключения соединения определяет, что необходимо осуществлять привод обоих двигателей-генераторов MGR и MGL. В этом случае модуль 303 переключения соединения генерирует сигналы SER, SEL для перевода обеих схем SWR и SWL переключателей в состояние проводимости и выводит эти сигналы в схемы SWR, SWL переключателей (этап S07).
Таким образом, по меньшей мере, один из двигателей-генераторов MGR, MGL электрически соединен с преобразователем 14 постоянного тока в переменный, и в этом состоянии преобразователь 14 постоянного тока в переменный управляет током привода двигателя (этап S08). Каждым из NPN транзисторов Q3-Q8 в преобразователе 14 постоянного тока в переменный управляют в соответствии с сигналом PWMI, выводимым из модуля 306 генерирования PWM, для переключения, что позволяет двигателям-генераторам MGR, MGL выводить крутящие моменты в соответствии с соответствующими, индивидуально требуемыми значениями крутящих моментов TFR*, TFL* привода модулей колес (этап S09).
Таким образом, когда транспортное средство 100 движется прямо вперед, двигатель-генератор из множества двигателей-генераторов MGR, MGL, который используется как источник движущей силы, выбирают соответствующим образом, на основании требуемого крутящего момента TF* привода и значений скорости вращения ωFR, ωFL двигателей-генераторов MGR, MGL. Таким образом можно обеспечить максимальную общую эффективность привода двигателей-генераторов.
В отличие от этого, снова обращаясь к этапу S03, если будет принято решение, что транспортное средство 100 поворачивает, тогда в соответствии с блок-схемой последовательности операций, показанной на фиг.7, один из двигателей-генераторов MGR, MGL выбирают в качестве источника движущей силы, соответствующим образом, в зависимости от направления поворота транспортного средства 100.
Более конкретно, как показано на фиг.6, на этапе S03, если угол θs поворота, задаваемый рычагом 7 управления, имеет абсолютное значение, превышающее заданное значение, тогда, дополнительно учитывая, является ли угол θs поворота положительным или отрицательным, принимают решение, поворачивает ли транспортное средство 100 вправо (этап S11).
Если на этапе S11 будет принято решение, что транспортное средство 100 поворачивает вправо, тогда определяют распределение крутящего момента таким образом, чтобы только модуль колеса, расположенный снаружи поворота, то есть только левый модуль FL переднего колеса, использовался в качестве модуля привода колеса, и модуль колеса, расположенный внутри поворота, то есть правый модуль FR переднего колеса, использовался как модуль колеса, работающий в режиме свободного качения.
Более конкретно, если транспортное средство поворачивает направо, индивидуально требуемое значение крутящего момента TFL* левого модуля FL переднего колеса устанавливают равным требуемому значению крутящего момента TF*, и индивидуально требуемое значение крутящего момента TFR* правого модуля FR переднего колеса устанавливают равным нулю. В соответствии с этим модуль 303 переключения соединения генерирует сигналы SER, SEL на основе соответствующих, индивидуально требуемых установленных значений крутящих моментов TFR*, TFL* привода модулей колес для перевода схемы SWR переключателя и схемы SWL переключателя в состояние проводимости и вывода из состояния проводимости, соответственно (этап S13).
Если на этапе S11 будет принято решение, что транспортное средство 100 не поворачивает направо, тогда модуль 302 определения распределения движущей силы дополнительно определяет, поворачивает ли транспортное средство 100 налево (этап S12). Если это так, определяется распределение крутящего момента, которое, в отличие от применявшегося распределения, когда транспортное средство 100 поворачивало направо, обеспечивает использование только правого модуля FR переднего колеса в качестве приводного модуля колеса, и при этом левый модуль FL переднего колеса используется как свободно катящийся модуль колеса.
Более конкретно, когда транспортное средство поворачивает налево, индивидуально требуемое значение крутящего момента TFL* левого модуля FL переднего колеса, устанавливают равным нулю, и индивидуально требуемое значение правого крутящего момента TFR* привода правого модуля FR переднего колеса устанавливают равным требуемому значению крутящего момента TF* привода. В соответствии с этим, модуль 303 переключения соединения генерирует сигналы SER, SEL на основе соответствующих индивидуально требуемых установленных значений крутящих моментов TFR*, TFL* привода модулей колеса для перевода схемы SWR переключателя и схемы SWL переключателя в состояние проводимости и вывода из состояния проводимости, соответственно (этап S14).
Таким образом, один из двигателей-генераторов MGR, MGL и преобразователь 14 постоянного тока в переменный электрически соединяют, и в этом состоянии, преобразователь 14 постоянного тока в переменный управляет током привода двигателем (этап S15). Таким образом, NPN транзисторами Q3-Q8 преобразователя 14 постоянного тока в переменный управляют в соответствии с сигналом PWMI для переключения, что обеспечивает вывод двигателями-генераторами MGR, MGL, крутящих моментов в соответствии с соответствующими индивидуально требуемыми значениями крутящих моментов TFR*, TFL* привода модулей колеса (этап S16).
Таким образом, когда транспортное средство 100 поворачивает, привод двигателя-генератора, соединенного с модулем колеса, расположенным внутри относительно направления, в котором поворачивает транспортное средство, отключают. Это позволяет обеспечить плавный поворот транспортного средства 100, что обеспечивает возможность стабильного движения транспортного средства.
Кроме того, общая эффективность привода двигателей-генераторов может быть более высокой, чем у обычного электрического транспортного средства, в котором управляет скоростью проскальзывания на основе разности скорости вращения правого и левого индукционных двигателей, что обеспечивает возможность генерирования индукционными двигателями равных крутящих моментов.
Пример варианта осуществления изобретения
Настоящее изобретение в варианте воплощения направлено на устройство управления движущей силой для транспортного средства, в котором обеспечивается независимый привод модулей колес, которое также можно применять в транспортном средстве 100A в соответствии с системой, в которой обеспечивается независимый привод четырех модулей колес, как показано на фиг.8, а также для транспортного средства 100, в котором обеспечивается независимый привод двух модулей колес, такого, как показано на фиг.1. Более конкретно, как показано на фиг.8, в транспортном средстве 100A используется система, обеспечивающая независимый привод четырех модулей колес, которая обеспечивает независимый привод левого и правого модулей FL, FR передних колес с использованием двигателей-генераторов MGFL (передний левый двигатель-генератор), MGFR (передний правый двигатель-генератор), и независимый привод левого и правого модулей RL, RR задних колес с помощью двигателей-генераторов MGRL (задний левый двигатель-генератор), MGRR (задний правый двигатель-генератор).
Один совместно используемый модуль 1A управления мощностью предусмотрен для четырех двигателей-генераторов MGFL, MGFR, MGRL, MGRR. Модуль 1 управления мощностью интегрально управляет приводом четырех двигателей-генераторов MGFL, MGFR, MGRL, MGRR. Модуль 1А управления мощностью, в основном, имеет ту же конфигурацию, что и модуля 1 управления мощностью по фиг.1.
Кроме того, транспортное средство 100A включает в себя четыре схемы SWFL (передний левый переключатель), SWFR (передний правый переключатель), SWRL (задний левый переключатель), SWRR (передний правый переключатель) переключателей для электрического соединения или разъединения модуля 1A управления мощностью и двигателей-генераторов MGFL, MGFR, MGRL, MGRR, соответственно. Так же, как и схемы SWR, SWL переключателей, показанные на фиг.1, четыре схемы SWFL, SWFR, SWRL, SWRR переключателей переводят в состояние проводимости/выводят из состояния проводимости, в ответ на сигналы SEFL, SEFR, SERL, SERR, вырабатываемые ECU 3A.
Устройство управления движущей силой по фиг.8 отличается от устройства управления движущей силой, показанного на фиг.1, переключением, которое переводит четыре схемы SWFL, SWFR, SWRL, SWRR переключателей в состояние проводимости/выводит из состояния проводимости, обеспечивая избирательный привод четырех двигателей-генераторов MGFL, MGFR, MGRL, MGRR. Четыре схемы SWFL, SWFR, SWRL, SWRR переключателей переключают, используя способ, аналогичный применяемому в устройстве 1 управления движущей силой, показанном на фиг.1, соответствующим образом, в зависимости от того, как в данный момент времени движется транспортное средство 100A (то есть по требуемой движущей силе и направлению, в котором движется транспортное средство). Более конкретно, распределение крутящего момента среди модулей FR, FL, RR, RL колес определяют на основе движущей силы, которую должно вырабатывать транспортное средство 100A и скорости вращения двигателей-генераторов MGFL, MGFR, MGRL, MGRR для обеспечения максимальной общей эффективности привода четырех двигателей-генераторов MGFL, MGFR, MGRL, MGRR.
Кроме того, когда транспортное средство 100A поворачивает, распределение крутящего момента между модулями FR, FL, RR, RL колес определяют так, чтобы модуль колес, расположенный внутри направления, в котором поворачивает транспортное средство, работал в режиме свободного качения.
В соответствии с определенным распределением рассчитывают соответствующие, индивидуально требуемые значения крутящих моментов модулей колес, и в соответствии с ними избирательно переводят в состояние проводимости схемы SWFL, SWFR, SWRL, SWRR переключателей. Таким образом, транспортное средство 100A делает выбор между движением от режима с использованием одного модуля колеса в качестве приводного модуля колеса, до движения с максимальным использованием четырех модулей колес, в качестве приводных модулей колес.
Таким образом, в варианте воплощения настоящего изобретения используется конфигурация, обеспечивающая возможность привода множества двигателей-генераторов с помощью одной схемы привода. Это позволяет получить устройство управления движущей силой с уменьшенными размерами, весом и стоимостью.
Кроме того, в настоящей конфигурации один или, по меньшей мере, два из множества двигателей-генераторов можно выбрать в качестве двигателя-генератора/двигателей-генераторов, который используется/используются в качестве источника/источников движущей силы, соответствующим образом, в соответствии с тем, как движется транспортное средство в данный момент времени. Таким образом, можно осуществлять эффективный привод выбранных двигателей-генераторов, независимо от того, какая величина движущей силы требуется. В результате обеспечивается возможность получения повышенной общей эффективности транспортного средства в целом.
Кроме того, из множества двигателей-генераторов, может быть выбран двигатель-генератор, привод которого не требуется осуществлять соответствующим образом, в соответствии с направлением движения транспортного средства. Транспортное средство, таким образом, может плавно поворачивать, и это может обеспечить стабильность движения транспортного средства.
Следует понимать, что варианты воплощения, описанные здесь, являются иллюстрацией и не представляют собой какое-либо ограничение. Объем настоящего изобретения определен формулой изобретения, а не приведенным выше описанием, и при этом следует иметь в виду, что она включает в себя все модификации, находящиеся в пределах объема и значимого эквивалента положений формулы изобретения.
Промышленная применимость
Настоящее изобретение можно применять для устройства управления движущей силой, установленного на транспортном средстве с независимым приводом модулей колес.
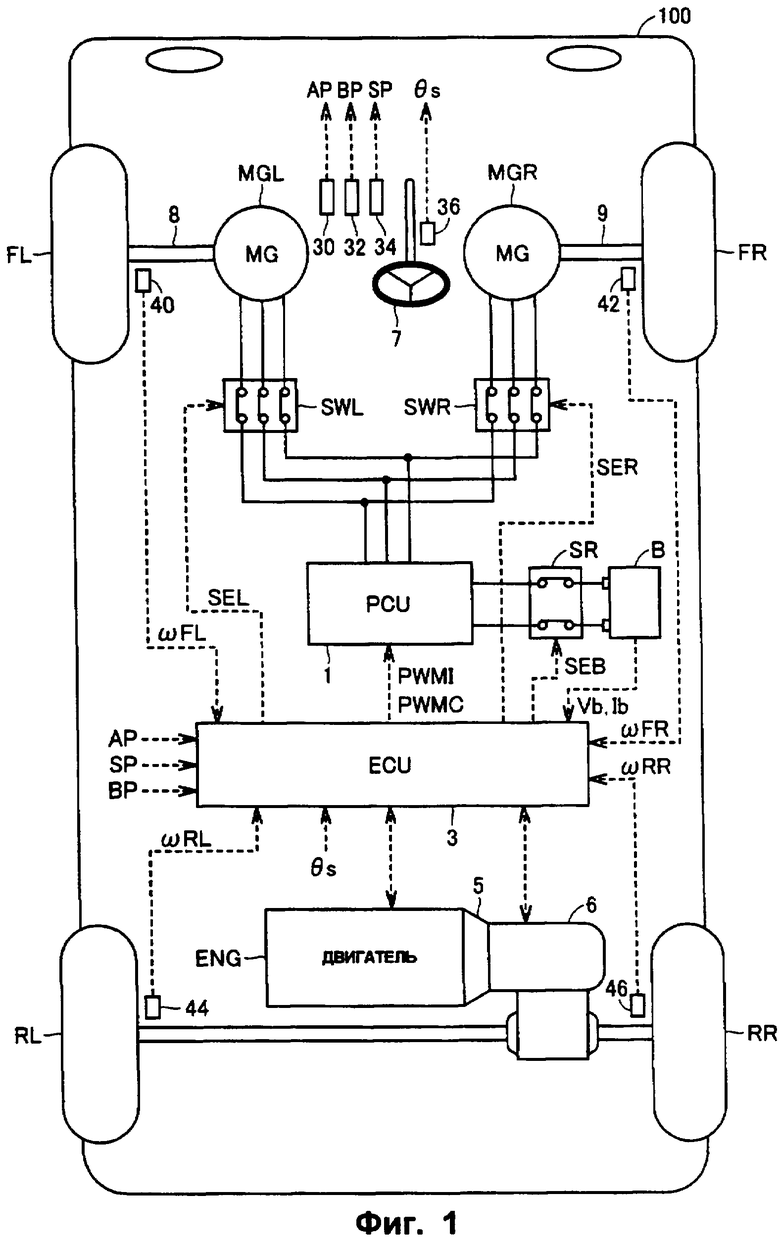
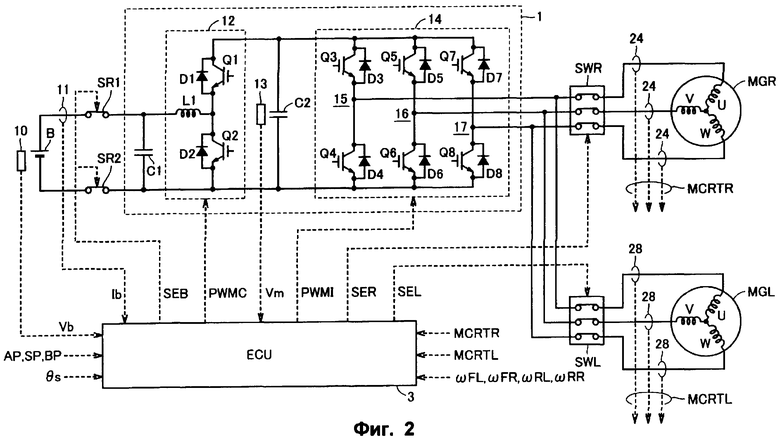
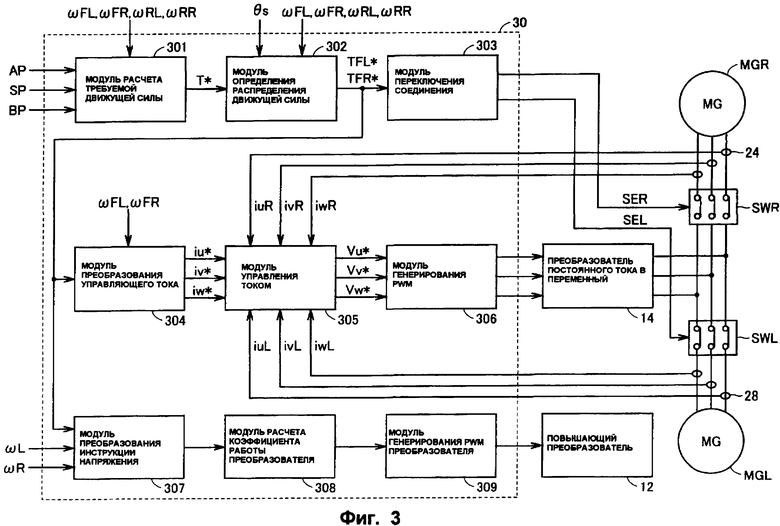

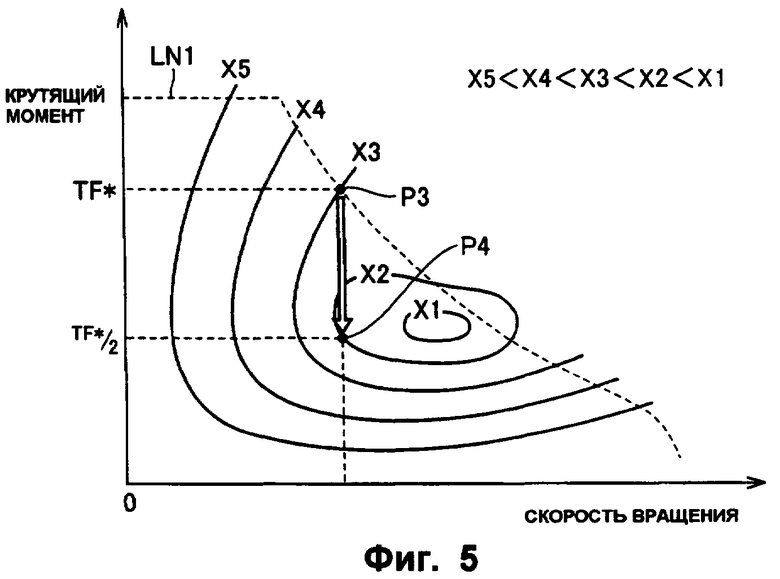
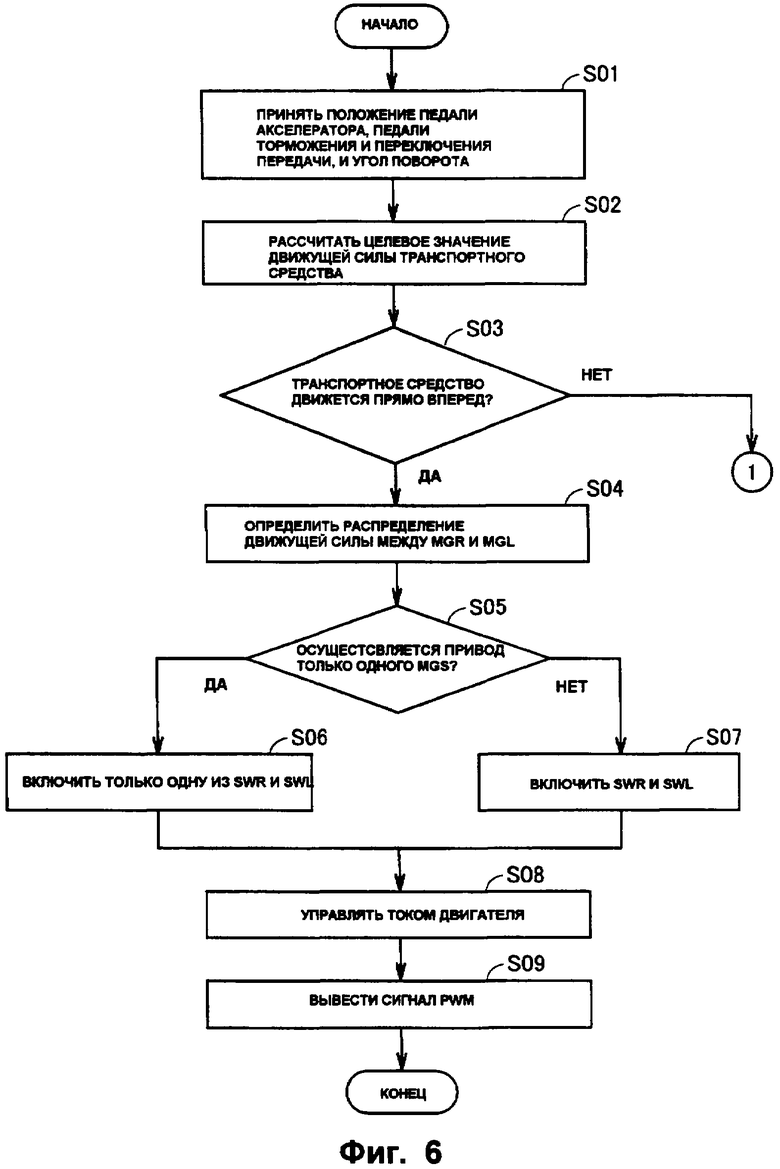
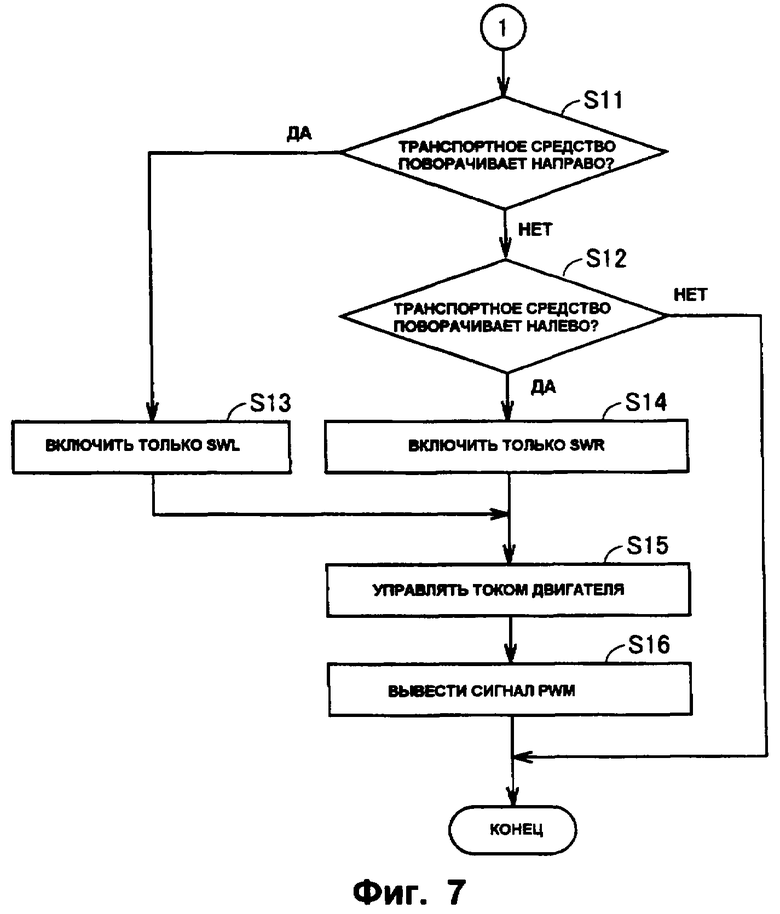
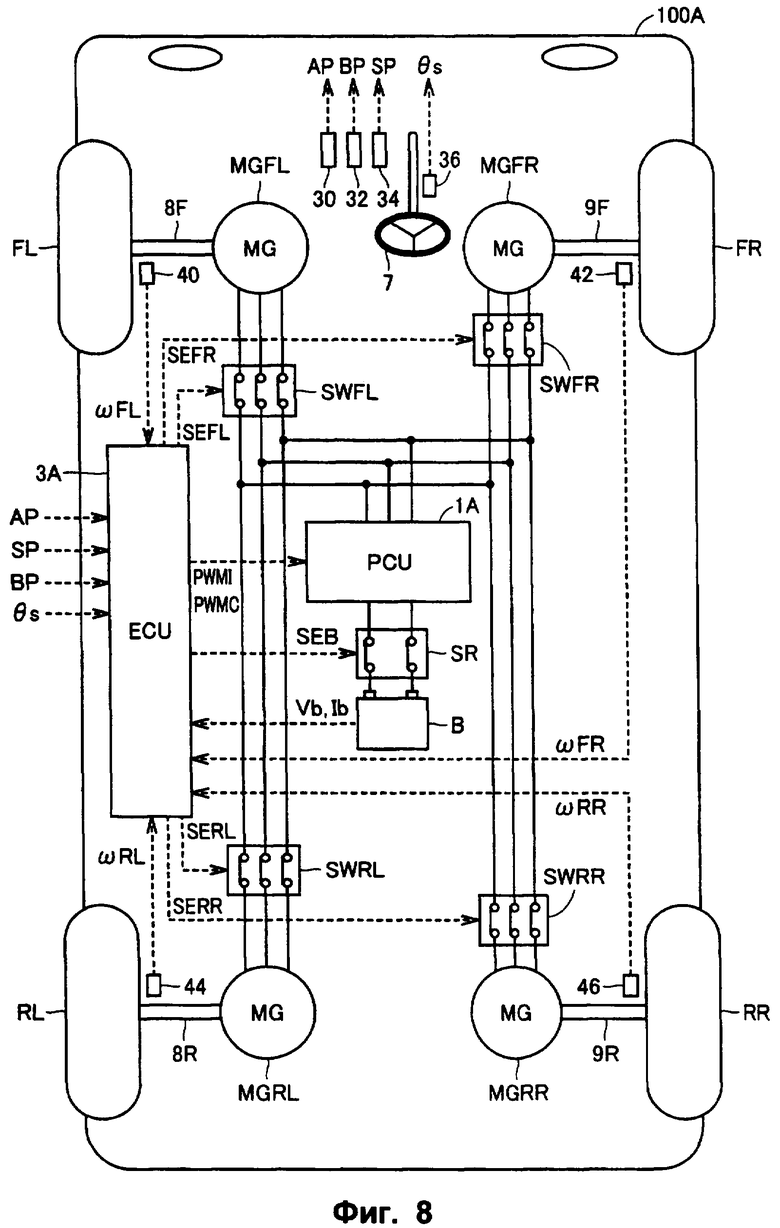
Изобретение относится к транспортным средствам с независимым приводом колес от отдельных источников привода. Устройство содержит n двигателей-генераторов, модуль привода колеса, схему привода, источник питания для привода n двигателей-генераторов, механизм переключения. Механизм переключения выполнен с возможностью выборочного переключения состояния, в котором один из n двигателей-генераторов и схема привода соединены вместе, в состояние, в котором m из n двигателей-генераторов и схема привода соединены вместе. Устройство по второму варианту дополнительно содержит устройство управления. Устройство управления включает в себя первое средство привода, предназначенное для привода m из n двигателей-генераторов с помощью схемы привода, и второе средство привода, предназначенное для привода одного из n двигателей-генераторов от схемы привода. Устройство по третьему варианту дополнительно содержит n схем переключателей, выполненных с возможностью электрического соединения/отключения схемы привода и n двигателей-генераторов, соответственно. Устройство управления управляет схемой привода для выборочного перевода одной или m из n схем переключателей в состояние соединения и для обеспечения совместного генерирования любым двигателем-генератором движущей силы. Технический результат заключается в повышении эффективности электропривода. 3 н. и 4 з.п. ф-лы, 8 ил.
1. Устройство управления движущей силой транспортного средства с независимым приводом модулей колес, содержащее n двигателей-генераторов (MGL, MGR), каждый из которых соединен с модулем привода колеса и приводится в движение независимо друг от друга, причем n представляет собой натуральное число, равное, по меньшей мере, двум, схему (1) привода, выполненную с возможностью совместного ее использования упомянутыми n двигателями-генераторами (MGL, MGR) и выполненную с возможностью получения электроэнергии от источника (В) питания для привода упомянутых n двигателей-генераторов (MGL, MGR), и механизм (SWL, SWR) переключения, выполненный с возможностью выборочного переключения состояния, в котором один из упомянутых n двигателей-генераторов (MGL, MGR) и схема (1) привода соединены вместе, в состояние, в котором m из упомянутых n двигателей-генераторов (MGL, MGR) и схема (1) привода соединены вместе, причем m представляет собой натуральное число, равное, по меньшей мере, двум и не превышающее n.
2. Устройство управления движущей силой для транспортного средства с независимым приводом модулей колес, содержащее n двигателей-генераторов (MGL, MGR), каждый из которых соединен с модулем привода колеса и приводится в движение независимо друг от друга, причем n представляет собой натуральное число, равное, по меньшей мере, двум, схему (1) привода, выполненную с возможностью совместного ее использования упомянутыми n двигателями-генераторами (MGL, MGR) и выполненную с возможностью получения электроэнергии от источника (В) питания для привода упомянутых n двигателей-генераторов (MGL, MGR), и устройство (3) управления, управляющее схемой (1) привода в соответствии с тем, как транспортное средство (100) движется в данный момент времени, причем устройство (3) управления включает в себя первое средство привода, предназначенное для привода m из упомянутых n двигателей-генераторов (MGL, MGR) с помощью схемы (1) привода, причем m представляет собой натуральное число, равное, по меньшей мере, двум и не превышающее n, и второе средство привода, предназначенное для привода одного из упомянутых n двигателей-генераторов (MGL, MGR) от схемы (1) привода.
3. Устройство управления движущей силой для транспортного средства с независимым приводом модулей колес, содержащее n двигателей-генераторов (MGL, MGR), каждый из которых соединен с модулем привода колеса и приводится в движение независимо друг от друга, причем n представляет собой натуральное число, равное, по меньшей мере, двум, схему (1) привода, выполненную с возможностью совместного ее использования упомянутыми n двигателями-генераторами (MGL, MGR) и выполненную с возможностью получения электроэнергии от источника (В) питания для привода упомянутых n двигателей-генераторов (MGL, MGR); n схем (SWL, SWR) переключателей, выполненных с возможностью электрического соединения/отключения схемы (1) привода и упомянутых n двигателей-генераторов (MGL, MGR) соответственно, и устройство (3) управления, управляющее схемой (1) привода, в соответствии с тем, как транспортное средство (100) движется в данный момент времени, для выборочного перевода одной или m из упомянутых n схем (SWL, SWR) переключателей в состояние соединения, а также для того, чтобы обеспечить совместное генерирование любым из упомянутых двигателей-генераторов, соединенным с упомянутыми одной из m упомянутых n схем (SWL, SWR) переключателей, движущей силы, удовлетворяющей значению движущей силы, которую должно вырабатывать транспортное средство (100).
4. Устройство по п.3, в котором, если упомянутое транспортное средство (100) должно вырабатывать относительно малую движущую силу, устройство (3) управления выборочно переводит в состояние соединения одну из упомянутых n схем (SWL, SWR) переключателей, и, если требуется, чтобы транспортное средство (100) выводило относительно большую движущую силу, устройство (3) управления выборочно переводит в состояние соединения m из упомянутых n схем (SWL, SWR) переключателей, причем m представляет собой натуральное число, равное, по меньшей мере, двум и не превышающее n.
5. Устройство по п.4, в котором устройство (3) управления включает в себя модуль определения скорости вращения, выполненный с возможностью определения значения скорости вращения упомянутых n двигателей-генераторов (MGL, MGR), модуль (301) определения требуемой движущей силы, определяющий требуемую движущую силу, которая требуется для транспортного средства (100), модуль (302) определения распределения движущей силы, выборочно определяющий распределение для любого из упомянутых n двигателей-генераторов (MGL, MGR) требуемой движущей силы на основе определяемых значений скорости вращения и требуемой движущей силы для обеспечения максимальной общей эффективности привода упомянутых n двигателей-генераторов (MGL, MGR), и модуль (303) переключения соединения, выборочно переводящий в состояние соединения любую из упомянутых n схем (SWL, SWR) переключателей, связанных с любыми выбранными двигателями-генераторами.
6. Устройство по п.5, в котором устройство (3) управления дополнительно включает в себя модуль определения угла поворота, определяющий угол поворота транспортного средства (100), и если на основе определяемого угла поворота будет принято решение, что транспортное средство (100) движется прямо вперед, модуль (302) определения распределения движущей силы выборочно определяет любой из упомянутых двигателей-генераторов для распределения требуемой движущей силы на основе значений скорости вращения и требуемой движущей силы.
7. Устройство по п.6, в котором, если будет принято решение на основе определяемого угла поворота, что транспортное средство (100) поворачивает, модуль (302) определения распределения движущей силы выборочно определяет любой из упомянутых двигателей-генераторов, которому распределяют требуемую движущую силу, на основе направления поворота транспортного средства (100).
| JP 9093714 А, 04.04.1997 | |||
| DE 4133060 А1, 08.04.1993 | |||
| RU 2070857 С1, 27.12.1996 | |||
| US 5788003 А, 04.08.1998. |

