Предлагаемые изобретения относятся к автомобилестроению, а именно к автомобилям с электрическим приводом, и особенно эффективно могут быть использованы в городских условиях (когда максимальная скорость движения ограничена). Современные серийно выпускаемые электромобили имеют одну и ту же обобщенную функциональную схему привода: тяговая аккумуляторная батарея; управляемый преобразователь; система обеспечения функционирования привода электромобиля; электродвигатель; редуктор; главная передача. (https://auto.ironhorse.ru/ct/elektromobili)
Схема технологически сложна и перенасыщенна разнообразными датчиками состояния и подсистемами нормализации работы всех элементов. Как аналог, может быть указан еще и тяговый электропривод постоянного тока (Патент РФ №2131361), который содержит силовой широтно-импульсный преобразователь, двухполюсный контактор и электродвигатель постоянного тока с независимым возбуждением.
Все подобные схемы имеют принципиальную особенность: регулирование скорости производится по электрическому каналу «преобразователь - двигатель», а редуктор только понижает скорость вращения двигателя в фиксированное число раз. В городском цикле движения, характеризующемся регулярными троганиями с места, разгонами, торможениями и остановками, это приводит к частым пиковым значениям пусковых и тормозных токов. Если электродвигателю такие режимы не опасны благодаря его высокой перегрузочной способности, то в тяговом аккумуляторе зарядный ток (при прямой рекуперации во время торможений) может в несколько раз превысить допустимое значение, а броски разрядного тока аккумулятора во время разгонов резко снижают его емкость между подзарядками. Кроме прочего, существенно укорачивается и жизненный цикл аккумулятора - самого дорогого элемента привода.
Проблема может быть снята использованием вместо редуктора хотя бы трехскоростной коробки передач (http://ecoconceptcars.ru/2011/07 /trexskorostnaya-transmissiya-antonov-plc-budet-ekonomit-do-15-enersii-elektromobilya.html) или же вариатора с автоматическим бесступенчатым изменением передаточного отношения (Трансмиссия гибридного автомобиля Форд С MAX Energy; Патент РФ №2332599), как это делают в обычных и гибридных автомобилях.
Тем самым уменьшаются броски токов в электрической цепи привода и, главное, уменьшается расход ресурса тяговой батареи. Однако для электромобиля с регулированием скорости по электрическому каналу такая модернизация усложняет и удорожает без того непростую схему привода, может привести к дополнительным проблемам с ремонтами, обслуживанием и т.д., и в итоге теряет реальный смысл.
Возникает идея передачи функции регулирования скорости движения электромобиля в механический канал: тогда двигатель становится нерегулируемым, регулирующий его энергоснабжение преобразователь - ненужным, а редуктор заменяется на управляемый вариатор.
Как прототип можно указать имеющие все эти признаки способ и систему управления силовой передачей моторного транспортного средства (Патент РФ №2389626). Передача содержит нерегулируемый двигатель и специальный реверсируемый вариатор, выходной вал которого при определенном передаточном числе имеет возможность быть неподвижным («нейтраль зубчатой передачи»). Используется «регулирование крутящего момента». Скорость регулируется косвенно: вариатор отрабатывает задаваемый ему реактивный крутящий момент и автоматически обеспечивает изменения передаточного числа, обусловленные ускорением двигателя и/или транспортного средства. С целью сохранения управлямости движением транспортного средства в диапазоне низких обратных передаточных чисел вариатора, включающем «нейтраль зубчатой передачи», двигатель не отключается, а его скорость поддерживается путем задания ему некоторого крутящего момента, даже когда силовая передача работает в состоянии «движения накатом».
Фактически все перечисленные свойства прототипа являются его же недостатками и вынужденным ответом на неверную исходную посылку: косвенное регулирование скорости с использованием обратной связи по сигналу датчика реактивного крутящего момента на вариаторе. Это, а также сложный, симметричный по реверсу, вариатор, и обусловили возникновение «сингулярностей» в процессе «движения накатом», что потянуло за собой усложнение электронного блока, изощренный алгоритм управления режимами движения в нем, необходимость постоянной работы двигателя без отключений, и т.д.
Технической задачей изобретения является использование принципа прямого управления скоростью по механическому каналу, а именно применение нереверсивного управляемого вариатора в трансмиссии и учет органических особенностей такого привода.
Решение указанной технической задачи обеспечивается тем, что в способе управления приводом электромобиля и устройстве для его осуществления, содержащем блок управления, тяговую аккумуляторную батарею, электродвигатель постоянного тока с независимым возбуждением, реверсор возбуждения, главную передачу с вариатором, отличающийся тем, что: во всех режимах движения передаточное отношение вариатора (в пределах диапазона D его плавного изменения) поддерживают обратно-пропорциональным сигналу задатчика интенсивности скорости движения; при трогании с места якорь и обмотку возбуждения двигателя подключают к батарее сразу, а в случае движения назад одновременно понижают до требуемого максимальный уровень сигнала задания скорости; при автоматической остановке скорость электромобиля плавно снижают и в момент спада сигнала задания скорости до уровня 1/D двигатель переключают в режим электродинамического торможения, а при спаде сигнала задатчика ниже 0,1/D от аккумуляторной батареи отключают и обмотку возбуждения; при ускоренном торможении дополнительно наращивают темп спада сигнала задания скорости пропорционально положению педали тормоза.
2. Устройство привода электромобиля, содержащее тяговую аккумуляторную батарею, блок старт-стопа, электродвигатель постоянного тока и реверсор возбуждения, переключатель режима движения, трансмиссию, состоящую из принудительно управляемого вариатора и главной передачи, блок управления с педалями тормоза и акселератора, отличающееся тем, что педаль тормоза дополнительно соединена с первым входом блока управления, педаль акселератора подключена ко второму входу блока управления, переключатель режима движения в положении «назад» подключен к третьему входу блока управления, якорь электродвигателя и обмотка его возбуждения раздельно подключены к тяговой аккумуляторной батарее через блок старт-стопа, первый выход блока управления, соединен с входом управления вариатором, а его второй выход, соединен с входом управления блока старт-стопа.
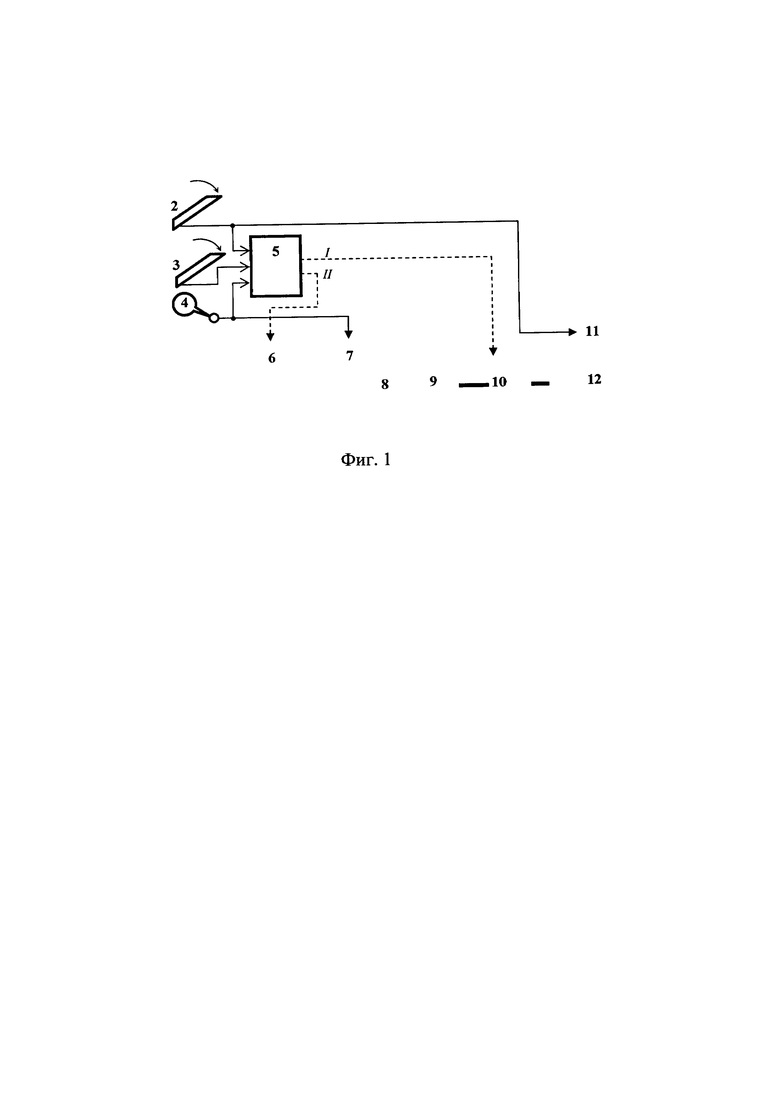
На фиг. 1 представлена схема привода транспортного средства по предлагаемому способу. Она содержит тяговую аккумуляторную батарею 1, педаль тормоза 2, педаль акселератора 3, переключатель режимов движения 4 минимум на три положения («вперед», «нейтраль», «назад»); блок управления 5, блок автоматического старт-стопа 6, реверсор возбуждения 7, обмотку возбуждения двигателя 8, двигатель постоянного тока 9, бесступенчатый вариатор 10 с принудительно управляемым передаточным отношением, штатное тормозное устройство 11 (включающее ручной тормоз), главную передачу 12.
Управление приводом электромобиля осуществляется следующим образом. При переводе переключателя 4 из нейтрального в положение «вперед» активируются блоки управления 5 и автоматического старт-стопа 6. Далее, при нажатии на педаль 3 акселератора задатчик интенсивности формирует нарастающий с требуемым темпом сигнал задания скорости электромобиля, который подается на вход вычислителя обратной величины. И задатчик, и вычислитель располагаются в блоке управления 5, их выходы и являются выходами этого блока: I-й передает сигнал от вычислителя на управляющий вход вариатора 10; II-й - от задатчика на управляющий вход блока 6 стартстопа. Фронтом сигнала II блока 5 осуществляется переход блока 6 из состояния «стоп» в состояние «старт», т.е. на якорь 9 и на обмотку 8 возбуждения через реверсор 7 поступает напряжение аккумуляторной батареи 1; электродвигатель почти мгновенно разгоняется до номинальной скорости. Передаточное отношение вариатора, соответственно сигналу I блока 5, плавно уменьшается от максимального до минимального - электромобиль начинает разгоняться.
При движении задним ходом сначала переключатель режимов 4 переводится из нейтрального в положение «назад», сигнал этого положения подается на реверсор возбуждения 7 и в блок управления 5. Тем самым обмотка возбуждения 8 переключается на обратную полярность, обеспечивая противоположное направление вращения электродвигателя, а в блоке 5 задатчику интенсивности устанавливается уменьшенное значение максимума выходного сигнала, чем понижается скорость перемещения задним ходом. В остальном автоматика привода работает так же, как и при движении вперед.
Автоматическая остановка осуществляется отпусканием педали 3 акселератора при не нажатой педали 2 тормоза. Сначала электромобиль тормозится с комфортным замедлением, обеспеченным темпом спада сигнала задатчика интенсивности, за счет роста передаточного отношения вариатора. По достижении передаточным отношением максимума, а сигналом 7 блока 5 соответствующего этому максимуму значения, блок 6 автоматического старт-стопа переводит двигатель в режим динамического торможения переключением его якорной обмотки 9 с аккумуляторной батареи 1 на тормозное сопротивление, установленное в блоке 6. Обмотка возбуждения 8 отключается от батареи не в этот же момент, а по окончании режима динамического торможения (соответствует спаду сигнала задатчика интенсивности до уровня ≤0,01 его максимума, что соответствует и полной остановке электромобиля).
Ускоренное торможение электромобиля, вплоть экстренного, осуществляется нажатием на педаль 2 штатного тормоза с одновременной подачей сигнала, пропорционального наклону этой педали, на вход блока управления 5, которым регулируется темп спада сигнала задатчика интенсивности таким образом, чтобы замедление скорости вращения выходного вала вариатора 10 было соответственным желаемой степени торможения. При необходимости окончательной остановки она происходит под параллельным действием штатного тормоза и автоматически включающегося режима электродинамического торможения двигателя.
Буксировка электромобиля должна происходить в положении переключателя 4 «нейтраль», штатный тормоз 11 при этом используется в обычном порядке. При стоянке машины (переключатель 4 также в положении «нейтраль») используется штатный стояночный тормоз.
Использование предложенного изобретения позволяет:
Во-первых, увеличение скорости транспортного средства соответствует уменьшению передаточного отношения вариатора, т.е. сигнал задания скорости и сигнал управления передаточным отношением вариатора обратно пропорциональны, и это обязательно должно быть учтено в управлении приводом.
Во-вторых, обычный вариатор имеет не бесконечный, а ограниченный диапазон регулирования (не более 6-10). Плавное регулирование скорости осуществляется в пределах от нижней границы в (1/6-1/10) до расчетного значения максимальной скорости. Если при трогании с места такой электромобиль будет разгоняться вначале с небольшим рывком (что еще терпимо), то при остановке (вариатору задается наибольшее передаточное отношение) скорость снизится не до нуля, а до тех же 1/6-1/10 максимума. Наложение внешнего тормоза не поможет, двигатель легко его преодолеет, т.к. благодаря вариатору на колесах в это время будет в 6-10 раз  крутящий момент. Надо либо вводить синхронизированный с тормозом механизм сцепления, либо отключать в этот момент электродвигатель от батареи и переводить его в режим электродинамического торможения. Последнее для «чистого» электромобиля предпочтительнее, поскольку экономит ресурс аккумулятора и может быть выполнено блоком автоматического «старт-стопа» с двумя особенностями: 1) при каждом трогании электромобиля якорь и обмотку возбуждения двигателя сразу соединяют с аккумулятором, причем для снижения коммутационных бросков тока надо в схему последовательно с якорем наглухо подключить пусковой индуктивный реактор; 2) во время остановки электромобиля в момент достижения передаточным отношением вариатора максимального значения якорь двигателя должен перемыкаться на тормозное сопротивление, а обмотка возбуждения - оставаться подключенной к батарее до практической остановки электромобиля.
крутящий момент. Надо либо вводить синхронизированный с тормозом механизм сцепления, либо отключать в этот момент электродвигатель от батареи и переводить его в режим электродинамического торможения. Последнее для «чистого» электромобиля предпочтительнее, поскольку экономит ресурс аккумулятора и может быть выполнено блоком автоматического «старт-стопа» с двумя особенностями: 1) при каждом трогании электромобиля якорь и обмотку возбуждения двигателя сразу соединяют с аккумулятором, причем для снижения коммутационных бросков тока надо в схему последовательно с якорем наглухо подключить пусковой индуктивный реактор; 2) во время остановки электромобиля в момент достижения передаточным отношением вариатора максимального значения якорь двигателя должен перемыкаться на тормозное сопротивление, а обмотка возбуждения - оставаться подключенной к батарее до практической остановки электромобиля.
В-третьих, достоинством подобного привода для городских условий является возможность выбора электродвигателя с пониженной номинальной мощностью. Однако при этом, ввиду относительно большой массы транспортного средства, разгоны несколько затягиваются, а торможения, наоборот, из-за увеличения передаточного отношения вариатором и соответственного увеличения тормозного момента, становятся слишком резкими. Поэтому в блоке управления для формирования сигнала управления скоростью электромобиля необходим задатчик интенсивности, причем с разными (и регулируемыми) длительностями фронта и спада сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводом электромобиля | 1979 |
|
SU1004165A1 |
| Электропривод для электромобиля | 1979 |
|
SU892632A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКОВ ЯКОРЯ И ВОЗБУЖДЕНИЯ | 2003 |
|
RU2248893C2 |
| СИСТЕМА ЭЛЕКТРОННОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2018 |
|
RU2674993C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2021 |
|
RU2756733C1 |
| Система управления транспортным средством с электрическим генератором | 1990 |
|
SU1801806A1 |
| Привод транспортного средства | 1985 |
|
SU1404383A1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА, СНАБЖЕННОГО СУПЕРКОНДЕНСАТОРНОЙ ИЛИ ИОНИСТОРНОЙ БАТАРЕЕЙ | 2018 |
|
RU2704459C1 |
| Устройство для управления транспортным средством | 1986 |
|
SU1402452A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
Группа изобретений относится к управлению тяговой системой транспортных средств с электротягой. Способ управления приводом электромобиля заключается в следующем. Во всех режимах движения передаточное отношение вариатора в пределах диапазона D его плавного изменения поддерживают обратно пропорциональным сигналу задатчика интенсивности скорости движения. При трогании с места якорь и обмотку возбуждения двигателя подключают к батарее сразу, а в случае движения назад одновременно понижают до требуемого максимальный уровень сигнала задания скорости. При автоматической остановке скорость электромобиля плавно снижают и в момент спада сигнала задания скорости до уровня 1/D двигатель переключают в режим электродинамического торможения, а при спаде сигнала задатчика ниже 0,1/D от аккумуляторной батареи отключают и обмотку возбуждения. При ускоренном торможении дополнительно наращивают темп спада сигнала задания скорости пропорционально положению педали тормоза. Устройство привода электромобиля содержит тяговую аккумуляторную батарею, блок старт-стопа, электродвигатель постоянного тока и реверсор возбуждения, переключатель режима движения, вариатор, главную передачу и блок управления. Технический результат заключается в упрощении управления приводом электромобиля. 2 н.п. ф-лы, 1 ил.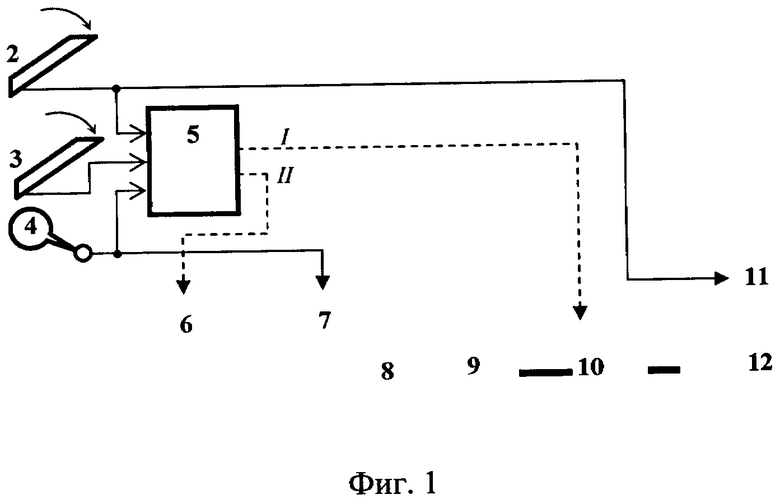
1. Способ управления приводом электромобиля, содержащим блок управления, тяговую аккумуляторную батарею, электродвигатель постоянного тока с независимым возбуждением, реверсор возбуждения, главную передачу с вариатором, отличающийся тем, что во всех режимах движения передаточное отношение вариатора в пределах диапазона D его плавного изменения поддерживают обратно пропорциональным сигналу задатчика интенсивности скорости движения; при трогании с места якорь и обмотку возбуждения двигателя подключают к батарее сразу, а в случае движения назад одновременно понижают до требуемого максимальный уровень сигнала задания скорости, при автоматической остановке скорость электромобиля плавно снижают и в момент спада сигнала задания скорости до уровня 1/D двигатель переключают в режим электродинамического торможения, а при спаде сигнала задатчика ниже 0,1/D от аккумуляторной батареи отключают и обмотку возбуждения, при ускоренном торможении дополнительно наращивают темп спада сигнала задания скорости пропорционально положению педали тормоза.
2. Устройство привода электромобиля, содержащее тяговую аккумуляторную батарею, блок старт-стопа, электродвигатель постоянного тока и реверсор возбуждения, переключатель режима движения, трансмиссию, состоящую из принудительно управляемого вариатора и главной передачи, блок управления с педалями тормоза и акселератора, отличающееся тем, что педаль тормоза дополнительно соединена с первым входом блока управления, педаль акселератора подключена ко второму входу блока управления, переключатель режима движения в положении «назад» подключен к третьему входу блока управления, якорь электродвигателя и обмотка его возбуждения раздельно подключены к тяговой аккумуляторной батарее через блок старт-стопа, первый выход блока управления соединен с входом управления вариатором, а его второй выход соединен с входом управления блока старт-стопа.
| JP H05147459 A, 15.06.1993 | |||
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ | 2006 |
|
RU2389626C2 |
| US 9266521 B2, 23.02.2016 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСМИССИОННОГО МЕХАНИЗМА | 2011 |
|
RU2509243C1 |

