Изобретение относится к военной технике и может использоваться в системах радиолокации и зенитных ракетно-артиллерийских комплексах надводных кораблей.
Известен комплекс зенитно-ракетного вооружения, содержащий пусковые установки, содержащие механизмы артустановок, подлежащие контролю и управлению (Л.1 RU 2212611 С2, 27.02.2003).
Известный комплекс предназначен только для решения задачи управления зенитно-ракетным вооружением и не имеет средств постоянного контроля механизмов артустановки.
Технический результат состоит в повышении надежности и безопасности работы с артиллерийской установкой (АУ) при боевой работе; быстром поиске возникшей неисправности с выдачей рекомендаций по устранению; проведении контроля работы артустановки при боевых стрельбах; сокращении внутри вращающейся части АУ и в агрегатной АУ количества соединительных кабелей, в возможности совершенствоваться по мере возникновения нестандартных ситуаций; в блокировке неправильных действий оператора, управляющего огнем АУ.
Для этого в способе контроля и управления механизмами артиллерийской установки, соединенной по каналам обмена с системой автоматического управления и контроля (САУК) и с модулем управления стрельбой (МУС), включающий сбор сигналов контроля с разных частей артиллерийской установки и передачу их в прибор управления САУК, осуществляют аналого-цифровое преобразование сигналов контроля и передачу через средства сопряжения, при этом прибор управления САУК выполняют на процессоре для обработки полученных цифровых сигналов и выдачи команд управления в соответствии с циклограммами работы артиллерийской установки и с контролем времени выполнения механизмами артиллерийской установки этих команд, причем с пульта управления МУС в режиме управления на АУ передают сигналы на включение механизмов для выбранного режима работы АУ. Одновременно снимают сигналы контроля с концевых выключателей механизмов АУ и передают их в САУК на устройство отображения состояния механизмов, при этом контроль состояния каждого концевого выключателя осуществляют с двух контактов и принимают как достоверный при трехкратном непрерывном получении их на устройстве отображения состояния механизмов с анализом наличия сигнала на одном контакте и исчезновения этого же сигнала с другого контакта этого же переключателя, при этом наличие или отсутствие сигнала на обоих контактах концевого выключателя свидетельствует о его неисправности, при этом номер концевого выключателя кодируют и высвечивают на блоке отображения пульта обслуживания САУК, одновременно код неисправного контролируемого механизма подают на блок отображения пульта управления МУС, где его расшифровывают посредством переводной таблицы, по данным о неисправных контролируемых механизмах прогнозируют наличие сбоев в аппаратуре и механизмах АУ и выдают рекомендации на настройку механизма АУ до того, как он полностью выйдет из строя.
Кроме того, при появлении неисправностей или отказов, которые могут привести к поломке механизмов АУ или подрыву боезапаса, осуществляют автоматическое выключение механизмов АУ.
При включении режима «боевой» производится автоматический выход на боевой режим работы АУ.
Режим «тренировка» предназначен для тренировки оператора с имитацией работы механизмов АУ в боевом режиме и с имитацией присутствия боеприпасов. Выбор режима работы осуществляют вручную. Контроль и управление механизмами АУ осуществляют с пульта загрузки, расположенного в подбашенном помещении АУ.
Загрузку-выгрузку боеприпасов и запись в память САУК типа боеприпаса, местонахождение его на конвейере и его весовой знак, а также выдачу команд, необходимых для загрузки боеприпасов, осуществляют с пульта загрузки, расположенного в подбашенном помещении АУ. Подачу сигналов включения механизмов осуществляют по цепям управления, выполненным на оптронах для развязки между цепями управления и питанием.
Связь между пультом управления МУС и пультом обслуживания САУК обеспечивают посредством развязывающих цепей, выполненных на интерфейсе с трансформаторной связью.
При наличии нескольких неисправностей механизмов АУ информацию о неисправных механизмах отображают на пультах загрузки, обслуживания, визуализации информации и на пультовом приборе МУС.
Контролируют выполнение поданных на механизмы АУ исполнительных команд и осуществляют контроль контактирующих устройств, тестовый и программный контроль.
При тестовом контроле осуществляют включение исполнительных механизмов по заданной программе с рекомендованными временными задержками посредством передачи с САУК сигналов управления и приема на САУК сигналов выполнения поступивших команд с фиксацией времени исполнения этих команд.
Формирование сигналов управления и прием сигналов контроля в САУК осуществляют центральным процессором по заданной программе в зависимости от выбранного режима работы АУ и типа боеприпаса.
В качестве сигналов управления используют код, преобразованный в АУ в аналоговые сигналы, обеспечивающие различные режимы управления АУ.
Аналого-цифровое преобразование осуществляют над сигналами, полученными с контактирующих устройств механизмов АУ.
Заданную программу алгоритма продолжения или запрещения стрельбы АУ выполняют в зависимости от результатов контроля неисправностей и отказов в механизмах АУ.
Программу выполняют с возможностью изменения при изменении требований к управлению механизмами АУ.
При установлении выбранного режима работы АУ «Включение «цепь стрельбы (Вкл. ЦС)», сигналы включения указанного режима, передаваемые по цифровому каналу обмена в АУ, дублируют подачей в АУ аналогового сигнала для подтверждения выдачи этого сигнала для исключения выдачи в АУ ложного сигнала «Вкл. ЦС».
Сущность способа заключается в следующем:
Аппаратура САУК разработана в виде изделия, входящего как составная часть изделия АУ, программно изменяющаяся при изменении требований к управлению механизмами АУ. Это позволяет автоматизировать процессы управления АУ, его включение и контроль. Изделие выполнено с определенным запасом выдачи сигналов управления и приема сигналов исполнения.
На Фиг.1 приведена структурная функциональная схема системы, реализующей заявленный способ.
Система содержит механизмы артустановки (АУ) 1, каналы обмена 2, систему автоматического управления и контроля (САУК) 3, модуль управления стрельбой (МУС) 4, устройство отображения состояния механизмов системы САУК 5, пульт обслуживания АУ, расположенный в башне АУ 6, пульт загрузки 7, расположенный в подбашенном помещении АУ, развязывающие цепи 8, цепи управления 9, соединительные цепи 10, приборы сопряжения, обеспечивающие прием и выдачу сигналов состояния и управления механизмами АУ, преобразующие аналоговые сигналы, определяющие состояние механизмов АУ, в код и код в аналоговые сигналы управления АУ - 11. Изделие является устройством управления и контроля выполнения механизмами АУ поступающих с системы управления команд с анализом времени их выполнения. Результат контроля и анализа поступает по однопроводному каналу обмена 2 в модуль МУС 4 для отображения на дисплее пульта 6 оператора.
С пульта управления МУС 4 в режиме управления включением механизмов и выборе режимов работы АУ 1 поступают соответствующие сигналы. При включении режима «Вкл. ЦС» на МУС 4 по каналу обмена 2 поступает команда включения режима «ЦС» и аналоговый сигнал в виде "+5В" для подтверждения выдачи этого сигнала. Такое дублирование исключает возможность выдачи в прибор управления САУК 3 ложного сигнала «Вкл. ЦС».
С механизмами и исполнительными элементами АУ 1 изделие связано через ячейки оптронных преобразователей, преобразующих сигналы, снимаемые с концевых выключателей механизмов АУ 1, в соответствующие коды управления ЭВМ прибора управления САУК 3.
В цепях коммутации АУ 1 изделие контролирует оба контакта концевых выключателей. Одновременно информация считается достоверной и принимается как достоверная при неоднократном непрерывном получении ее с анализом исчезновения этого же сигнала с другого контакта этого же переключателя.
Проверка исправности контактирующих устройств проводится анализом сигналов с обоих контактов контактирующих устройств. Сигнал должен быть только на одном контакте. Наличие или отсутствие сигнала на обоих контактах воспринимается ЭВМ прибора управления САУК 3 как неисправность контактирующего устройства. Номер неисправной позиции высвечивается на пульте обслуживания изделия А190 и на пульте управления МУС.
Для включения на АУ исполнительных механизмов с изделия САУК на АУ поступают сигналы управления "+6В", снимаемые с оптронных преобразователей. Такое построение позволяет полностью развязывать цепи управления и питания изделия САУК и АУ.
Связь с пультом управления загрузки 5 и пультом обслуживания 6 осуществляется также через ячейки оптронных развязок, преобразующих поступающий сигнал с пультов АУ в код, а код в сигналы индикации на пультах загрузки и обслуживания 5, 6.
На пульте загрузки и пульте обслуживания 5, 6 установлен обобщенный индикатор (светодиод), указывающий на наличие в аппаратуре неисправности - «Отказ».
Если в аппаратуре существует несколько неисправностей, информация о неисправных элементах высвечивается на индикаторах последовательно. Для расшифровки неисправности модуля, источника питания, контактирующего устройства, исполнительного элемента необходимо пользоваться переводной таблицей. Подтверждение отсутствия одного сигнала и наличия другого, снимаемого с каждого контактирующего устройства, позволяет исключить прием ложной информации при возникновении сбоев в линии или в аппаратуре. Наличие контроля напряжений источников питания и их значений с выдачей информации в линию обмена с модулем МУС позволяет осуществлять контроль напряжений источников питания, результаты тестового контроля, контроль выполнения механизмами АУ исполнительных команд, контроль контактирующих устройств.
Программа прогнозирования, осуществляющая контроль и учет наличия сбоев в аппаратуре и механизмах, анализ отклонений работы механизмов АУ от расчетного, время выполнения программ и нестабильность получения сигналов позволяет ЭВМ САУКа выдать рекомендации по замене модуля, контактирующего устройства или настройки механизма до того, как оно полностью выйдет из строя.
Программное включение исполнительных механизмов АУ с рекомендованными временными задержками исключает ошибки оператора, ускоряет время выполнения этих работ.
Внутренние шины канала обмена информацией между приборами САУКа, размещенные на вращающейся части для приема и выдачи сигналов управления механизмам, расположенным в башне АУ, приборами управления, обеспечивающими прием и выдачу сигнала управления механизмам и блокам, расположенным над палубой корабля, САУК и МУС объединены через соединители, подключенные по кольцу прибор управления и приборы сопряжения, что позволяет осуществлять взаимный контроль и перекрестное управление модулями между приборами при выходе из строя одной из линий или модуля обмена в приборе сопряжения. Такое построение связи аппаратуры между приборами САУКа повышает надежность обмена между приборами. Модуль связи и управления, стоящий в приборах сопряжения, вырабатывает сигналы управления рабочими ячейками в приборах сопряжения, преобразующими код в релейные сигналы и сигналы коммутационные в код. Обмен информацией в приборе побайтовый. При обмене осуществляется контроль по модулю два.
Взаимодействие изделия с внешними устройствами.
Изделие представляет собой комплекс аппаратуры, обеспечивающий управление и контроль механизмов артустановки САУК 3. Изделие выдает на исполнительные реле АУ 1 управляющие сигналы и принимает с контактирующих устройств механизмов АУ 1 сигналы исполнения, контроля через приборы сопряжения 11. САУК 3 обеспечивает выдачу сигналов управления в виде напряжений «+6В» и прием коммутационных сигналов в виде «+6В». Прибор управления САУК 3 обеспечивает решение всех рабочих программ, программ контроля и обмена с модулем МУС 4 по однопроводному интерфейсу типа "Манчестер-П" и осуществляет обмен между модулями. В системе управления механизмами артустановки 1 используется управляющая ЭВМ. Применение управляющей ЭВМ обеспечивает снижение потребляемой мощности, уменьшение массогабаритных характеристик по сравнению со стандартными релейными системами, а также обеспечивает выполнение задачи автоматической диагностики работоспособности АУ 1 и определение местоположения неисправности, возможность автоматического выбора типа боеприпаса в любой последовательности, чего релейные системы обеспечить не могут.
АУ управляется дистанционно с пульта управления МУС 4, оснащенного дисплеем и размещенного в посту управления стрельбой. На пульте имеются органы управления и индикаторное табло, необходимые для выбора режимов управления АУ.
Органы управления позволяют:
- включать и выключать АУ;
- переключать управление АУ на автоматическое;
- производить автоматический выход на боевой режим работы АУ;
- проводить тренировки оператора, имитируя присутствие боеприпасов;
- производить непрерывный контроль АУ;
- производить автоматически непрерывное документирование работы АУ с временем привязки работы всех механизмов АУ с записью в долговременную память ЭВМ.
В башне АУ размещается пульт обслуживания 6, с которого можно осуществлять операции, связанные с проведением регламентных работ и обслуживанием АУ, а также управлять частями АУ при проверке отдельных операций.
На барбете АУ 1 размещается пульт загрузки 7, с которого можно осуществлять операции, связанные с загрузкой-выгрузкой боеприпасов. На этом пульте имеются переключатели и индикаторные табло, показывающие тип загружаемого боеприпаса и формирования необходимых команд, обеспечивающих запись в памяти ПЗУ тип боезапаса, номер ячейки в транспортере, его весовой знак. Высокая надежность системы управления АУ 1 обеспечивается конструктивным построением САУК 3, предоставляющим территориальный сбор и выдачу сигналов управления на вращающиеся части АУ 1 и резервированием цепей управления 9. В процессе работы ЭВМ обрабатывает алгоритм управления АУ 1 с одновременной проверкой правильности полученных результатов при повторном решении задачи.
На систему автоматического управления и контроля 3 возложено управление и контроль исполнительными механизмами перемещения боеприпасов по трактам подачи - от магазина готовых к автоматической стрельбе макетов, размещаемых на вращающейся части, до каморы ствола. На изделие возлагается управление двумя транспортерами; автоматическую установку транспортера в положение, обеспечивающее подачу и заряжение в камору ствола боеприпаса того вида, который установлен на пульте управляющего огнем.
Выбор режима работы изделия производится оператором, управляющим огнем модуля МУС 4.
В модуль МУС 4 для выдачи информации оператору выдаются сигналы исполнения.
Управление изделием осуществляется также с пульта обслуживания, расположенного в башне АУ, и с пульта загрузки боеприпаса. При включении пультов производится блокировка цепей стрельбы и прибор управления, получая команды с этих пультов, производит их выполнение согласно заложенным алгоритмам.
Приборы изделия являются необслуживаемыми приборами, и информация, характеризующая правильность работы, выводится на пульт обслуживания, на пульт загрузки в виде сигнала «Отказ». На модуль МУС 4 информация транслируется по каналу обмена 2 для индикации управляющему огнем и записи о результате контроля, которая используется оператором для поиска неисправности. На пульте обслуживания АУ 6 расположены четыре семисегментных индикатора, на которых высвечивается номер неисправного устройства, что облегчает отыскание неисправности при автономной работе с изделием. Аппаратура контроля позволяет найти неисправность до неисправного блока, модуля, контактирующего устройства, механизма. Устранение неисправности в изделии сводится к замене неисправного модуля, блока. Размещение модулей проведено с учетом зоны обслуживания, что позволяет проводить замену модулей и регламентные работы.
Среднее время отыскания неисправного узла, блока - не более 3 мин, т.к. вычислитель прибора управления, контролирующий работоспособность аппаратуры, высвечивает номер неисправного блока на пульте обслуживания АУ 1 и транслирует номер неисправного блока по каналу обмена для высвечивания на пульте МУС 4. Среднее время восстановления работоспособности, равное 10 мин, достигается примененной блочно-модульной конструкции. При неисправности блока (модуля) заменяется целиком блок (модуль) на исправный блок (модуль), взятый из ЗИП. Одиночный комплект ЗИП модулей находится в САУК 3.
Время выхода изделия на рабочий режим - не более 30 с.
Восстановление первичного питания (50 Гц, 380 В) после его кратковременного исчезновения (не более 2 секунд) не приведет к самопроизвольной работе и выдаче ложных команд на АУ, так как при этом вырабатывается сигнал «Авария электропитания» и выдача сигналов на АУ блокируется, а вся информация для последующей работы записывается в энергонезависимое запоминающее устройство. То же самое происходит и при отключении питания на более длительное время. Пропадание первичного питания на время менее 2 секунд не влияет на работу изделия, так как генератор напряжения (400 Гц, 220 В) продолжает вращаться и вырабатывает напряжение около 3 секунд.
С помощью вычислительной машины производится полное управление и контроль всех исполнительных механизмов АУ, что обеспечивает:
- надежность и безопасность работы с АУ при боевой работе;
- быстрый поиск возникшей неисправности с выдачей рекомендаций по устранению;
- возможность установки на конвейер любого типа боезапаса с записью в долговременную память (на жесткий диск) номера ячейки и типа боезапаса в ней, что позволяет выбирать из этой ячейки при боевой работе любой тип боезапаса;
- непрерывное документирование с временной привязкой работы всех механизмов АУ с записью в долговременную память (на жесткий диск), что позволяет проводить контроль работы АУ при боевых стрельбах;
- обеспечение выдачи и сбора информации непосредственно у исполнительных механизмов, для передачи по цифровым каналам обмена на прибор управления (ЦВ), что сокращает внутри вращающейся части АУ и в агрегатной АУ количество соединительных кабелей, соответственно уменьшая их вес и повышая надежность работы АУ.
Введение в АУ цифрового вычислителя позволяет
- создать интеллект АУ, который может непрерывно совершенствоваться по мере возникновения нестандартных ситуаций;
- блокировать неправильные действия оператора, управляющего огнем АУ;
- формировать подсказки оператору;
- использовать технологические программы для проверки правильной работы отдельных механизмов АУ;
- индицировать на технологический экран все циклы работы АУ, от подачи боезапаса до выстрела;
- запоминать нахождение боезапаса на линии досылки в момент аварийного отключения питания АУ;
- проводить дострел взведенного на время боезапаса;
- применять новые типы разработанного боезапаса с доработкой только программного обеспечения;
- считать оставшиеся типы боезапаса;
- считать общий текущий настрел на ствол АУ для расчета поправки на расстрел ствола;
- устанавливать АУ на программные стопора по углам наведения при подаче на АУ углов наведения, находящихся вне рабочей зоны АУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля и диагностики артиллерийских комплексов и система для его реализации | 2020 |
|
RU2759036C1 |
| КОРАБЕЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС С РЕЖИМОМ КОМПЕНСАЦИИ ВЛИЯНИЯ ДЕФОРМАЦИЙ КОРПУСА КОРАБЛЯ | 2013 |
|
RU2542821C1 |
| КОРАБЕЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС С АВТОМАТИЧЕСКИМ УЧЕТОМ ИНДИВИДУАЛЬНЫХ ВЕСОВЫХ ЗНАКОВ СНАРЯДОВ И СПОСОБ НАВЕДЕНИЯ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ КОРАБЕЛЬНОГО АРТИЛЛЕРИЙСКОГО КОМПЛЕКСА | 2008 |
|
RU2393414C1 |
| СПОСОБ ВЫЯВЛЕНИЯ И КОМПЕНСАЦИИ ОШИБКИ ПРИЦЕЛИВАНИЯ В КОРАБЕЛЬНОМ АРТИЛЛЕРИЙСКОМ КОМПЛЕКСЕ | 2004 |
|
RU2265184C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2583741C1 |
| БРОНИРОВАННАЯ БАШНЯ "ТАЙФУН" БОЕВОЙ МАШИНЫ | 2003 |
|
RU2254546C1 |
| ОБЪЕКТ БРОНЕТЕХНИКИ | 2004 |
|
RU2274819C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ СТРЕЛЬБЫ АРТУСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2186321C2 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| Способ подсвета цели для обеспечения применения боеприпасов с лазерной полуактивной головкой самонаведения | 2021 |
|
RU2755134C1 |
Изобретение относится к военной технике и может использоваться в ракетно-артиллерийских комплексах надводных кораблей. Технический результат состоит в повышении надежности и безопасности работы артустановки (АУ) при боевой работе, быстром поиске неисправности с выдачей рекомендаций по устранению, проведении контроля работы АУ при боевых стрельбах, сокращении количества соединительных кабелей внутри вращающейся части АУ и в агрегатной АУ, что уменьшает их вес и увеличивает надежность работы АУ, в возможности совершенствоваться по мере возникновения нестандартных ситуаций, в блокировке неправильных действий оператора, управляющего огнем АУ. Согласно способу осуществляется сбор сигналов контроля с разных частей АУ, их аналого-цифровое преобразование и передача через средства сопряжения по каналам обмена в систему автоматического управления и контроля (САУК), выполненную на процессоре. САУК выдает команды управления механизмами АУ в соответствии с циклограммами работы артустановки и с контролем выполнения механизмами артустановки этих команд и времени их выполнения. 18 з.п. ф-лы, 1 ил.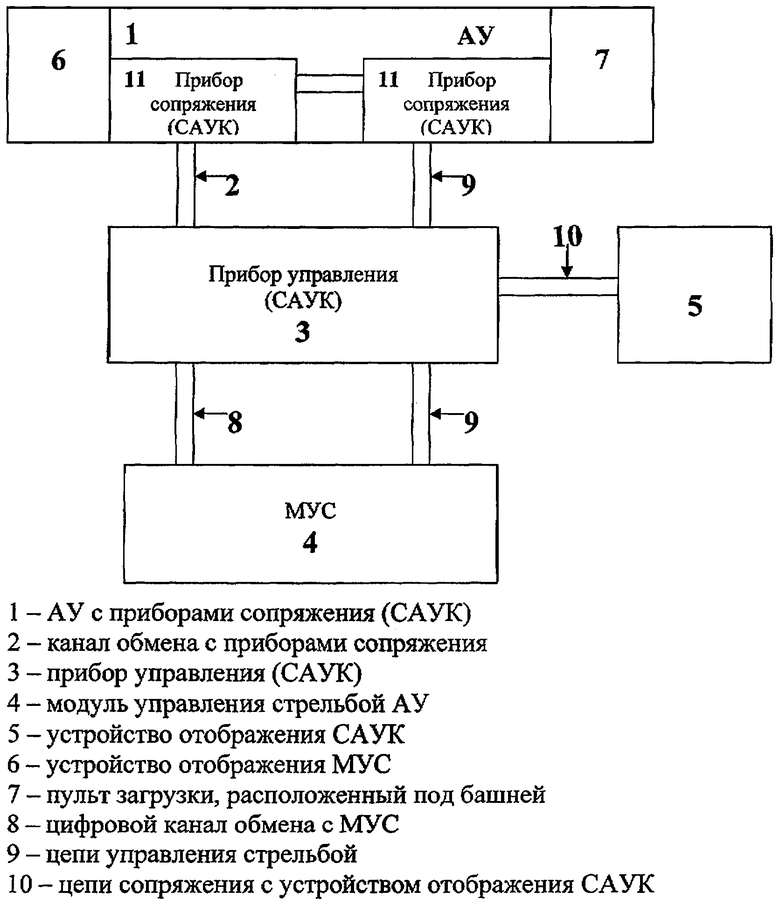
1. Способ контроля и управления артиллерийской установкой (АУ), соединенной по каналам обмена с системой автоматического управления и контроля (САУК) и с модулем управления стрельбой (МУС), включающий сбор сигналов контроля с разных частей артиллерийской установки и передачу их в прибор управления САУК, отличающийся тем, что, осуществляют аналого-цифровое преобразование сигналов контроля и передачу через средства сопряжения, при этом прибор управления САУК выполняют на процессоре для обработки полученных цифровых сигналов и выдачи команд управления в соответствии с циклограммами работы артиллерийской установки и с контролем времени выполнения механизмами артиллерийской установки этих команд, причем с пульта управления МУС в режиме управления на АУ передают сигналы на включение механизмов для выбранного режима работы АУ, одновременно снимают сигналы контроля с концевых выключателей механизмов АУ и передают их в САУК на устройство отображения состояния механизмов, при этом контроль состояния каждого концевого выключателя осуществляют с двух контактов и принимают как достоверный при трехкратном непрерывном получении их на устройстве отображения состояния механизмов с анализом наличия сигнала на одном контакте и исчезновения этого же сигнала с другого контакта этого же переключателя, при этом наличие или отсутствие сигнала на обоих контактах концевого выключателя свидетельствует о его неисправности, при этом номер концевого выключателя кодируют и высвечивают на блоке отображения пульта обслуживания САУК, одновременно код неисправного контролируемого механизма подают на блок отображения пульта управления МУС, где его расшифровывают посредством переводной таблицы, по данным о неисправных контролируемых механизмах прогнозируют наличие сбоев в аппаратуре и механизмах АУ и выдают рекомендации на настройку механизма АУ до того, как он полностью выйдет из строя.
2. Способ по п.1, отличающийся тем, что при появлении неисправностей или отказов, которые могут привести к поломке механизмов АУ или подрыву боезапаса, осуществляют автоматическое выключение механизмов АУ.
3. Способ по п.1, отличающийся тем, что при включении режима «боевой» производят автоматический выход на боевой режим работы АУ.
4. Способ по п.1, отличающийся тем, что режим «тренировка» предназначен для тренировки оператора с имитацией работы механизмов АУ в боевом режиме и с имитацией присутствия боеприпасов.
5. Способ по п.3, или 4, или 5, отличающийся тем, что выбор режима работы осуществляют вручную.
6. Способ по п.1, отличающийся тем, что контроль и управление механизмами АУ осуществляют с пульта загрузки, расположенного в подбашенном помещении АУ.
7. Способ по п.6, отличающийся тем, что загрузку-выгрузку боеприпасов и запись в память САУК типа боеприпаса, местонахождение его на конвейере и его весовой знак, а также выдачу команд, необходимых для загрузки боеприпасов, осуществляют с пульта загрузки, расположенного в подбашенном помещении АУ.
8. Способ по п.1, отличающийся тем, что подачу сигналов включения механизмов осуществляют по цепям управления, выполненным на оптронах для развязки между цепями управления и питанием.
9. Способ по п.1, отличающийся тем, что связь между пультом управления МУС и пультом обслуживания САУК обеспечивают посредством развязывающих цепей, выполненных на интерфейсе с трансформаторной связью.
10. Способ по п.1, отличающийся тем, что при наличии нескольких неисправностей механизмов АУ, информацию о неисправных механизмах отображают на пультах загрузки, обслуживания, визуализации информации и на пультовом приборе МУС.
11. Способ по п.1, отличающийся тем, что контролируют выполнение поданных на механизмы АУ исполнительных команд и осуществляют контроль контактирующих устройств, тестовый и программный контроль.
12. Способ по п.4, отличающийся тем, что при тестовом контроле осуществляют включение исполнительных механизмов по заданной программе с рекомендованными временными задержками посредством передачи с САУК сигналов управления и приема на САУК сигналов выполнения, поступивших команд с фиксацией времени исполнения этих команд.
13. Способ по п.12, отличающийся тем, что формирование сигналов управления и прием сигналов контроля в САУК осуществляют центральным процессором по заданной программе в зависимости от выбранного режима работы АУ и типа боеприпаса.
14. Способ по п.12, отличающийся тем, что в качестве сигналов управления используют код, преобразованный в АУ в аналоговые сигналы, обеспечивающие различные режимы управления АУ.
15. Способ по п.1, отличающийся тем, что аналого-цифровое преобразование осуществляют над сигналами, полученными с контактирующих устройств механизмов АУ.
16. Способ по п.12, отличающийся тем, что заданную программу алгоритма продолжения или запрещения стрельбы АУ выполняют в зависимости от результатов контроля неисправностей и отказов в механизмах АУ.
17. Способ по п.1, отличающийся тем, что САУК выполняют с программой, содержащей команды для выполнений действий по любому из пп.11-16.
18. Способ по п.17, отличающийся тем, что программу выполняют с возможностью изменения при изменении требований к управлению механизмами АУ.
19. Способ по п.3, отличающийся тем, что при установлении выбранного режима работы АУ «включение», «цепь стрельбы (включение ЦС)», сигналы включения указанного режима, передаваемые по цифровому каналу обмена в АУ, дублируют подачей в АУ аналогового сигнала для подтверждения выдачи этого сигнала для исключения выдачи в АУ ложного сигнала «Включение ЦС».
| ПРИСПОСОБЛЕНИЕ К РЯДОВЫМ СЕЯЛКАМ ДЛЯ ГНЕЗДОВОГО ВЫСЕВА СЕМЯН И МИНЕРАЛЬНЫХ ТУКОВ | 1929 |
|
SU23676A1 |
| Дражеровочный барабан | 1930 |
|
SU21654A1 |
| DE 3439082 A1, 30.04.1986 | |||
| СТЕНД ДЛЯ ИСПЫТАНИЯ РЕЗИНОВОГО НАДУВНОГО ЭЛЕМЕНТА ПАКЕРА | 2014 |
|
RU2545203C1 |
| EP 3439082 A1, 26.06.2002. | |||

