Изобретение относится к области вооружений, а более конкретно к артиллерийским комплексам, входящим в состав вооружения боевых надводных кораблей.
Корабельный артиллерийский комплекс представляет собой совокупность артиллерийской установки (АУ) с боеприпасами и системы управления, включающей, в свою очередь, радиолокационную или оптико-электронную станцию (РЛС или ОЭС) с палубным постом (ПП) обнаружения/сопровождения цели и прибор управления стрельбой (ПУС), обеспечивающий выработку полных углов вертикального и горизонтального наведения (ПУВН и ПУГН) АУ на основе текущих координат и параметров движения сопровождаемой цели, параметров движения своего корабля, внешней баллистики боеприпаса, отстояний ПП от АУ и метеоусловий стрельбы. Для выполнения указанных функций ПУС корабельного арткомплекса включает построитель координат (ПК), баллистический вычислитель (БВ) и обратный преобразователь координат (ОПК).
Параметры движения своего корабля, в том числе текущие значения килевой Ψ(t) и бортовой θ(t) качки корабля, используемые в ПУС системы управления, вырабатываются корабельной инерциально-навигационной системой - центральной гироскопической системой (ЦГС), входящей в состав оборудования корабля.
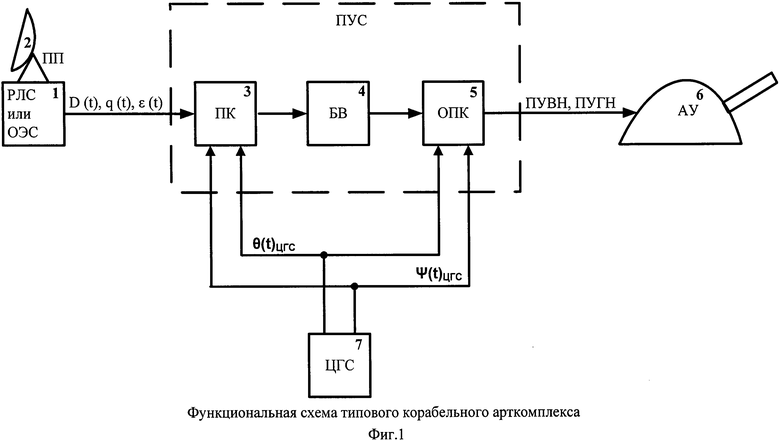
Функциональная схема типового корабельного арткомплекса, являющегося аналогом предлагаемого изобретения, приведена на Фиг.1.
Обозначено:
1 - радиолокационная или оптико-электронная станция (РЛС или ОЭС); обнаружения/сопровождения цели;
2 - палубный пост РЛС или ОЭС;
3 - построитель координат (ПК), обеспечивающий пересчет сферических координат сопровождаемой цели D(t), q(t), ε(t) из нестабилизированной корабельной системы координат в стабилизированную с учетом текущих значений килевой и бортовой качки;
4 - баллистический вычислитель, обеспечивающий выработку вектора скорости сопровождаемой цели, решение задачи встречи снарядов с целью (с учетом отстояний АУ от ПП, внешней баллистики снарядов, метеоусловий стрельбы) и выработку углов наведения АУ в стабилизированной системе координат;
5 - обратный преобразователь координат (ОГЖ), обеспечивающий пересчет углов наведения АУ в полные углы ПУВН, ПУГН в нестабилизированной корабельной системе координат с учетом текущих значений килевой и бортовой качки;
6 - артиллерийская установка;
7 - центральная гироскопическая система корабля (ЦТС), обеспечивающая измерение килевой и бортовой качки корабля.
Недостатком типового корабельного арткомплекса является отсутствие в нем учета деформаций корпуса корабля на волнении моря (на качке корабля), проявляющихся в виде угловых смещений осей территориально разнесенных ПП и АУ между собой и относительно ЦГС корабля.
Вопрос измерения и учета деформаций корпуса корабля, снижающих точность артиллерийской стрельбы, обрел особую актуальность в последнее время, поскольку с созданием нового поколения корабельного артвооружения с точностными характеристиками, улучшенными за счет использования современных технических достижений в области механики, радиолокации (оптико-электроники), автоматики и вычислительной техники, а также за счет внедрения новых методов метеобаллистической подготовки стрельбы, деформации корпуса корабля становятся определяющим фактором, ограничивающим эффективность корабельной артиллерии.
В настоящее время известны методы измерения деформаций протяженных морских объектов (надводных кораблей и судов) с помощью специальных технических средств, например посредством установки на корабле нескольких оптических лазерных приемников, направленных на единый лазерно-оптический репер (патент РФ №2032144), или путем совместной обработки информации от инерциально-навигационной системы корабля и датчиков угловых скоростей, устанавливаемых в контрольных точках объекта (см. Реферат доклада А.Б. Торопова, В.А. Тупысева на конференции «Навигация и управление движением», 2005 г., г. Санкт-Петербург).
Известен также измеритель деформаций корпуса корабля (изделие ИДК), обеспечивающий при совместной работе с корабельной инерциально-навигационной системой (ЦГС) выработку и выдачу потребителю информации об углах статической и динамической деформаций корпуса корабля в месте установки входящего в состав ИДК прибора ГК.
Недостатками изделия ИДК являются существенные ограничения по условиям его эксплуатации, исключающие возможность установки его приборов на открытой палубе в непосредственной близости от ПП и АУ, необходимость выделения специальных корабельных помещений для размещения приборов ИДК, обеспечивающих климатические требования, электропитание и удобство обслуживания аппаратуры, а также большое время готовности ИДК к работе в условиях качки корабля (до 120 мин после включения), обусловленное длительностью процедуры фильтрации данных в интересах определения статической деформации корпуса.
Техническим результатом заявленного изобретения является снижение влияния динамических деформаций корпуса корабля на точность выработки стрельбовых данных в арткомплексе без использования специальных технических средств прямых измерений указанных деформаций путем дополнения штатного состава корабельного арткомплекса новыми функциональными устройствами и связями, обеспечивающими учет в приборе управления стрельбой арткомплекса фактических (реальных) значений килевой и бортовой качек в местах размещения палубного поста и артустановки.
Для этого в корабельном артиллерийском комплексе (арткомплексе) с режимом компенсации влияния деформаций корпуса корабля (далее «режим компенсации»), содержащем артиллерийскую установку, связанную с радиолокационной или оптико-электронной станцией (РЛС или ОЭС) слежения за целью через прибор управления стрельбой, содержащий последовательно соединенные построитель координат для пересчета текущих координат сопровождаемой цели из нестабилизированной корабельной системы координат в стабилизированную систему координат, баллистический вычислитель, вырабатывающий углы наведения артустановки по вертикали и горизонту, и обратный преобразователь координат для пересчета углов наведения артустановки из стабилизированной в нестабилизированную корабельную систему координат и использующий для пересчета текущих координат сопровождаемой цели и углов наведения артиллерийской установки сигналы килевой и бортовой качки корабля, поступающие из центральной гироскопической системы (ЦТС) корабля, на неподвижной части палубного поста РЛС (или ОЭС) и артиллерийской установки в плоскостях килевой и бортовой качки корабля устанавливаются датчики угловой скорости (ДУС) и в состав арткомплекса введены канал формирования и коммутации сигналов килевой качки и канал формирования и коммутации сигналов бортовой качки для построителя координат (ПК ПУС), канал формирования и коммутации сигналов килевой качки и канал формирования и коммутации сигналов бортовой качки для обратного преобразователя координат (ОПК ПУС), каждый из каналов формирования и коммутации сигналов килевой или бортовой качки содержит ДУС, соединенный с входом двухпозиционного двухполюсного переключателя, переводящего арткомплекс из штатного режима в режим компенсации деформаций, на другой вход переключателя поступают сигналы соответствующей качки с выхода центральной гироскопической системы корабля (ЦГС), один из выходов переключателя соединен с входом транслятора-запоминателя сигнала качки, измеряемого ЦГС, а другой выход - с интегратором угловой скорости качки, измеряемой ДУС, выходы интегратора и транслятора-запоминателя соединены с входами сумматора, выходы сумматоров каналов формирования и коммутации сигналов килевой или бортовой качки соединены с входами «соответствующей качки» построителя координат и обратного преобразователя координат прибора управления стрельбой.
Сущность предлагаемого изобретения заключается в использовании в приборе управления стрельбой арткомплекса в режиме компенсации, вместо значений килевой и бортовой качек, измеряемых корабельной ЦГС, фактических (реальных) значений килевой и бортовой качек в местах установки ПП и АУ арткомплекса, для чего штатный состав типового корабельного арткомплекса дополняется новыми функциональными устройствами и связями, обеспечивающими учет влияния динамических деформаций корпуса корабля без использования специальных технических средств их прямых измерений типа лазерных приемников и изделий ИДК.
Предпосылки для повышения точности стрельбы вытекают при этом из приведенного ниже анализа ошибок артиллерийской стрельбы, обусловленных деформациями корпуса корабля:
Деформации корпуса корабля в процессе эксплуатации можно подразделить на статическую деформацию, обусловленную, например, изменением загрузки судна за счет принятия на борт и последующего расхода топлива и боеприпасов, и динамические деформации, вызванные воздействием волнения моря при прохождении кораблем вершин и подошв волн.
Наличие статической деформации корпуса корабля приводит к систематической ошибке артиллерийской стрельбы, неизменной на протяжении длительного времени и компенсируемой предусмотренными в современных арткомплексах средствами и методами (использованием телевизионного устройства оперативного контроля согласования (ОКС) оптико-механических осей АУ и ПП, пристрелкой поправок, корректурой по воздушному или морскому реперу и др.).
Что касается динамических деформаций корпуса корабля на волнении моря, то они вызывают переменную во времени ошибку стрельбы, проявляющуюся в процессе обстрела цели в виде случайных отклонений (блуждания) центра группирования снарядов относительно цели, что не только снижает вероятность попадания в цель, но также затрудняет определение и компенсацию систематической ошибки стрельбы указанными выше средствами и методами.
В результате, с усилением волнения моря и увеличением динамических деформаций корпуса корабля эффективность стрельбы типового корабельного арткомплекса снижается, что обуславливает актуальность реализации в арткомплексе предлагаемого режима компенсации.
Функциональная схема корабельного арткомплекса с режимом компенсаций влияния деформаций корпуса корабля, обеспечивающим учет реальных перемещений ПП и АУ в плоскостях килевой и бортовой качки, приведена на Фиг.2.
Обозначено:
1 - радиолокационная или оптико-электронная станция (РЛС или ОЭС) обнаружения/сопровождения цели;
2 - палубный пост РЛС или ОЭС;
3 - построитель координат (ПК), обеспечивающий пересчет сферических координат сопровождаемой цели D(t), q(t), ε(t) из нестабилизированной корабельной системы координат в стабилизированную с учетом текущих значений килевой и бортовой качки;
4 - баллистический вычислитель, обеспечивающий выработку вектора скорости сопровождаемой цели, решение задачи встречи снарядов с целью (с учетом отстояний АУ от ПП, внешней баллистики снарядов, метеоусловий стрельбы) и выработку углов наведения АУ в стабилизированной системе координат;
5 - обратный преобразователь координат (ОПК), обеспечивающий пересчет углов наведения АУ в полные углы ГГУВН, ПУГН в нестабилизированной корабельной системе координат с учетом текущих значений килевой и бортовой качки;
6 - артиллерийская установка;
7 - центральная гироскопическая система корабля, обеспечивающая измерение килевой и бортовой качки корабля;
8 - датчик угловой скорости 
9, 14, 19, 24 - двухпозиционные двухполюсные переключатели, обеспечивающие коммутацию сигналов качки при переводе арткомплекса из штатного режима в режим компенсации деформаций;
10 - интегратор угловой скорости
11 - транслятор TP-ЗУ сигнала Ψ(t)ЦГС килевой качки корабля, измеряемой ЦГС, с функцией запоминания значения Ψ(t0)ЦГС в момент t0 включения режима компенсации (в момент срабатывания переключателей 9, 14, 19, 24);
12 - сумматор выходного сигнала Ψ(t)ДУС интегратора 10 с запомненным в TP-ЗУ (поз.11) значением Ψ(t0)ЦГС;
13 - датчик угловой скорости 
15 - интегратор угловой скорости
16 - транслятор TP-ЗУ сигнала θ(t)ЦГС бортовой качки корабля, измеряемой ЦТС, с функцией запоминания значения θ(t0)ЦГС в момент t0 включения режима компенсации;
17 - сумматор выходного сигнала θ(t)ДУС интегратора 15 с запомненным в TP-ЗУ (поз.16) значением θ(t0)ЦГС;
18 - датчик угловой скорости в
20 - интегратор угловой скорости
21 - транслятор TP-ЗУ сигнала θ(t)ЦГС бортовой качки корабля, измеряемой ЦГС, с функцией запоминания значения θ(t0)ЦГС в момент t0 включения режима компенсации;
22 - сумматор выходного сигнала θ(t)ДУС интегратора 20 с запомненным в TP-ЗУ (поз.21) значением θ(t0)ЦГС;
23 - датчик угловой скорости
25 - интегратор угловой скорости
26 - транслятор TP-ЗУ сигнала Ψ(t)ЦГС килевой качки корабля, измеряемой ЦГС, с функцией запоминания значения Ψ(t0)ЦГС в момент t0 включения режима компенсации;
27 - сумматор выходного сигнала Ψ(t)ДУС интегратора 25 с запомненным в TP-ЗУ (поз.26) значением Ψ(t0)ЦГС.
Как следует из сравнения функциональных схем арткомплексов, приведенных на Фиг.1 и Фиг.2, реализация режима компенсации влияния деформаций корпуса корабля обеспечивается путем внедрения в штатный состав корабельного арткомплекса ряда функциональных устройств, которые могут быть сгруппированы в четыре идентичных по составу канала, обведенных на Фиг.2 пунктирными рамками:
- канал формирования сигнала килевой качки Ψ(t)ПП для построителя координат (поз.3), включающий устройства 8, 9, 10, 11, 12;
- канал формирования сигнала бортовой качки θ(t)ПП для построителя координат (поз.3), включающий устройства 13, 14, 15, 16, 17;
- канал формирования сигнала бортовой качки θ(t)АУ для обратного преобразователя координат (поз.5), включающий устройства 18, 19, 20, 21, 22;
- канал формирования сигнала килевой качки Ψ(t)АУ для обратного преобразователя координат (поз.5), включающий устройства 23, 24, 25, 26, 27.
Следует отметить, что все функциональные устройства, входящие в состав вышеуказанных каналов, за исключением датчиков угловой скорости (ДУС поз.8, 13, 18, 23), могут быть реализованы в арткомплексе путем доработки штатных алгоритмов программного обеспечения построителя координат (поз.3) и обратного преобразователя координат (поз.5), что позволяет ограничить конструктивные (аппаратные) доработки типового корабельного арткомплекса по внедрению режима компенсации только установкой соответствующих ДУС-ов на основаниях ПП и АУ и обеспечением электрических связей между указанными ДУС-ми и прибором управления стрельбой (ПУС) арткомплекса.
Функционирование корабельного арткомплекса с режимом компенсации происходит следующим образом.
Перед включением режима компенсации, когда переключатели поз.9, 14, 19 и 24 находятся в исходном положении, в ПУС арткомплекса используются сигналы килевой и бортовой качек, вырабатываемые корабельной ЦГС. Указанные сигналы Ψ(t)ЦГС и θ(t)ЦГС, пройдя через нормально замкнутые контакты переключателей поз.9, 14, 19 и 24, трансляторы ТР-ЗУ (поз.11, 16, 21 и 26) и сумматоры (поз.12, 17, 22 и 27), поступают в построитель координат (поз.3) и в обратный преобразователь координат (поз.5) прибора управления стрельбой (ПУС), обеспечивая выработку данных наведения АУ (ГТУВН, ГГУГН) в полном соответствии со штатным режимом функционирования типового арткомплекса. Сигналы с выходов датчиков ДУС (поз.8, 13, 18 и 23), установленных на ПП и АУ, в данном режиме не используются.
При включении режима компенсации (при срабатывании переключателей поз.9, 14, 19 и 24) сигналы ДУС (поз.8, 13, 18 и 23) через замыкающие контакты вышеуказанных переключателей подключаются к входам интеграторов (поз.10, 15, 20 и 25), обеспечивающих пересчет измеряемых угловых скоростей
Сформированные в режиме компенсации сигналы Ψ(t)ПП, θ(t)ПП и Ψ(t)АУ, θ(t)АУ соответствуют фактическим значениям углов килевой и бортовой качки в местах расположения ПП и АУ с учетом динамических деформаций корпуса корабля, исключая тем самым влияние указанных деформаций на точность выработки стрельбовых данных (ПУВН, ПУГН) в арткомплексе.
Достоинствами предлагаемого корабельного артиллерийского комплекса с режимом компенсации влияния деформаций корпуса корабля являются:
- простота и экономичность реализации, не требующей использования дорогостоящих технических средств прямых измерений деформаций корпуса корабля типа изделий ИДК (сопоставимых по стоимости с ЦГС) и исключающей необходимость проведения конструктивных доработок корабля по размещению, установке, запитке и обслуживанию аппаратуры указанных технических средств;
- возможность практической реализации изобретения путем незначительной доработки штатных арткомплексов, в том числе находящихся в эксплуатации на кораблях, в части установки ДУС-ов на основаниях ГШ и АУ арткомплекса, трансляции сигналов ДУС-ов на ПУС арткомплекса и доработки программного обеспечения ПУС.
Литература
1. Реферат доклада А.Б. Торопова, В.А. Тупысева на конференции «Навигация и управление движением», 2005 г., г. Санкт-Петербург.
2. RU 2032144 C1.
Изобретение относится к вооружению и может быть использовано в корабельных артиллерийских установках. Корабельная артиллерийская установка (АУ) с режимом компенсации влияния деформаций корпуса корабля содержит АУ с радиолокационной, оптико-электронной станциями, прибор управления стрельбой с построителем координат и обратным преобразователем координат, баллистический вычислитель, центральную гироскопическую систему, датчики угловой скорости, двухпозиционный двухполюсный переключатель, транслятор-запоминатель сигнала качки, интегратор угловой скорости качки, сумматор. Изобретение позволяет повысить точность стрельбы при динамических деформациях корпуса корабля. 2 ил.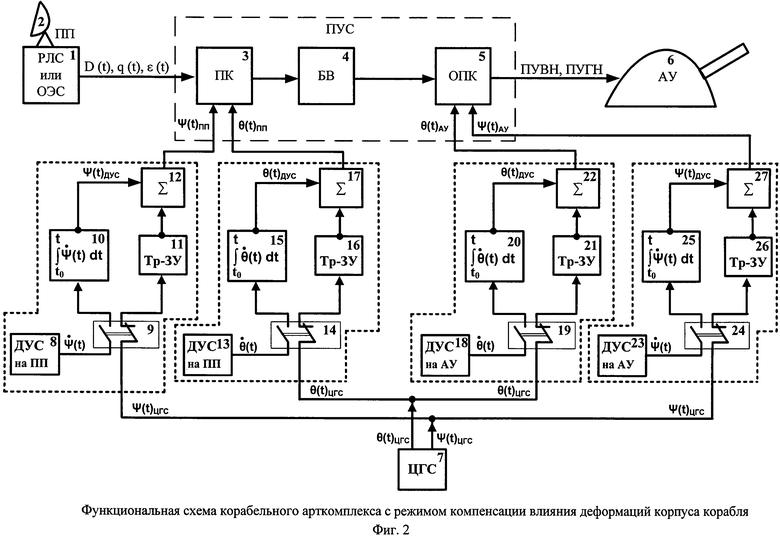
Корабельный артиллерийский комплекс (арткомплекс) с режимом компенсации влияния деформаций корпуса корабля, содержащий артиллерийскую установку, связанную с радиолокационной или оптико-электронной станцией (РЛС или ОЭС) слежения за целью через прибор управления стрельбой (ПУС), содержащий последовательно соединенные построитель координат (ПК ПУС) для пересчета текущих координат сопровождаемой цели из нестабилизированной корабельной системы координат в стабилизированную систему координат, баллистический вычислитель, вырабатывающий углы наведения артустановки по вертикали и горизонту, и обратный преобразователь координат (ОПК ПУС) для пересчета углов наведения артустановки из стабилизированной в нестабилизированную корабельную систему координат и использующий для пересчета текущих координат сопровождаемой цели и углов наведения артиллерийской установки сигналы килевой и бортовой качки корабля, поступающие из центральной гироскопической системы (ЦГС) корабля,
отличающийся тем, что на неподвижной части палубного поста РЛС (или ОЭС) и артиллерийской установки в плоскостях килевой и бортовой качки корабля устанавливаются датчики угловой скорости (ДУС) и в состав арткомплекса введены канал формирования и коммутации сигналов килевой качки и канал формирования и коммутации сигналов бортовой качки для ПК ПУС, канал формирования и коммутации сигналов килевой качки и канал формирования и коммутации сигналов бортовой качки для ОПК ПУС, каждый из каналов формирования и коммутации сигналов килевой или бортовой качки содержит ДУС, соединенный с входом двухпозиционного двухполюсного переключателя, переводящего арткомплекс из штатного режима в режим компенсации деформаций, на другой вход переключателя поступают сигналы соответствующей качки с выхода центральной гироскопической системы корабля (ЦГС), один из выходов переключателя соединен с входом транслятора-запоминателя сигнала качки, измеряемого ЦГС, а другой выход - с интегратором угловой скорости качки, измеряемой ДУС, выходы интегратора и транслятора-запоминателя соединены с входами сумматора, выходы сумматоров каналов формирования и коммутации сигналов килевой или бортовой качки соединены с входами «соответствующей качки» построителя координат и обратного преобразователя координат прибора управления стрельбой.
| СПОСОБ ВЫЯВЛЕНИЯ И КОМПЕНСАЦИИ ОШИБКИ ПРИЦЕЛИВАНИЯ В КОРАБЕЛЬНОМ АРТИЛЛЕРИЙСКОМ КОМПЛЕКСЕ | 2004 |
|
RU2265184C1 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| US 20110114726 A1, 19.05.2011 | |||
| US 6345784 B1, 12.02.2002 | |||

