Изобретение относится к области вооружения и военной техники, в частности к стабилизаторам вооружения (далее по тексту - СВ) дистанционного управления боевыми модулями (далее по тексту - БМ), обеспечивающим, совместно с примененным на объекте военного назначения (далее по тексту - ОВН) комплексом управления (далее по тексту - КУ), возможность реализации дистанционного управления любым типом(типами) установленного на БМ вооружения.
Изобретение может найти применение в конструкции БМ, предназначенных для установки на шасси боевых машин типа БРДМ, БМП, БТР, МТЛБ и т.д. и оснащаемых различными типами (видами) вооружения и КУ, выбор которых определяется заказчиком.
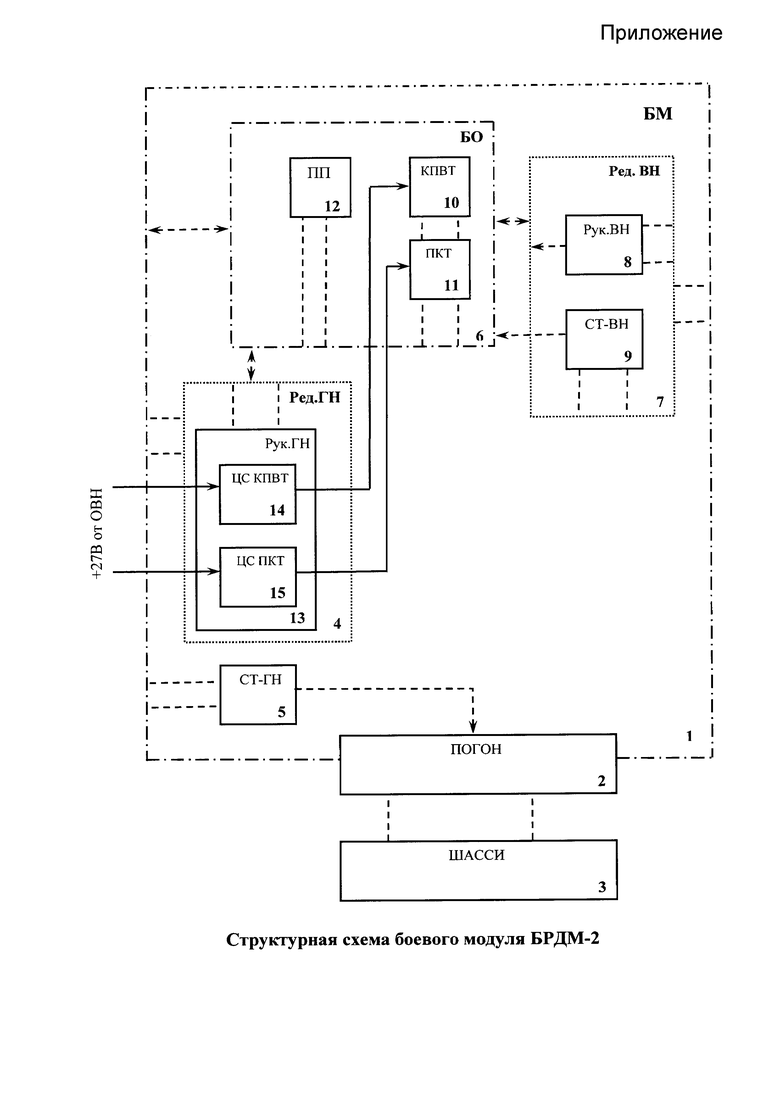
Известна бронированная разведывательно-дозорная машина БРДМ-2, комплекс вооружения которой содержит установленные в боевом модуле (БМ) спаренные в блоке оружия (далее по тексту - БО) крупнокалиберный 14,5-мм пулемет КПВТ и 7,62-мм пулемет ПКТ. Блок оружия (БО) установлен в боевом модуле через цапфенный узел. Наведение в вертикальной плоскости, в пределах -5…+30°, осуществляется вручную при помощи рукоятки подъемного механизма - редуктора ВН (далее по тексту - Ред. ВН), а в горизонтальной плоскости при круговом вращении на 360° обеспечивается ручным вращением рукоятки механизма поворота -редуктора ГН (далее по тексту - Ред. ГН) БМ (башни), установленного на вращающемся, относительно шасси ОВН, погоне.
Прицел перископический (далее по тексту - ПП) механически жестко связан с блоком оружия (БО) и позволяет осуществлять оператору наблюдение, а также обеспечивает прицеливание прямой наводкой на цель (в пределах зоны видимости ПП в 23°).
Структурная схема боевого модуля (БМ) БРДМ-2 принята за прототип.
См. 1). БРДМ-2. Техническое описание и инструкция по эксплуатации. Кн. 1. М., Военное издательство, 1987 г.
2). БРДМ-2. Техническое описание и инструкция по эксплуатации. Кн. 2. М., Военное издательство, 1987 г.
Боевой модуль (БМ) установлен на шариковой опоре - погоне над вырезом в шасси машины. За счет наличия погона боевой модуль (БМ) имеет возможность поворачиваться на 360° относительно шасси машины при помощи редуктора ГН (Ред. ГН). Редуктор ГН (Ред. ГН) механически связан с боевым модулем (БМ) и кинематически с погоном. Для жесткой фиксации боевого модуля (БМ) относительно шасси машины используется стопор ГН (СТ-ГН). Блок оружия (БО) установлен в боевом модуле (БМ) через цапфенный узел. Оператор (наводчик) при помощи жестко закрепленного на (БМ) редуктора ВН (Ред. ВН), связанного механически с зубчатым сектором блока оружия (БО), имеет возможность осуществлять наведение блока оружия (БО) в вертикальной плоскости в пределах -5…+30° при помощи рукоятки редуктора ВН (Рук. ВН). Для жесткой фиксации блока оружия (БО) в вертикальной плоскости относительно боевого модуля (БМ) используется стопор ВН (СТ-ВН). Блок оружия (БО) включает в себя крупнокалиберный 14,5-мм пулемет (КПВТ), 7,62-мм пулемет (ПКТ) и прицел перископический (ПП), жестко механически связанный с блоком оружия (БО). Прицел перископический (ПП) позволяет осуществлять наблюдение и прицеливание в пределах зоны видимости ПП в 23° за счет наведения оператором блока оружия (БО) по ВН и ГН рукоятками редуктора ВН (Рук. ВН) и редуктора ГН (Рук. ГН) соответственно.
Кнопки управления цепями стрельбы пулемета КПВТ (ЦС КПВТ) и пулемета ПКТ (ЦС ПКТ) расположены на рукоятке (Рук. ГН) редуктора ГН (Ред. ГН). Электрическое управление цепями стрельбы пулемета КПВТ (ЦС КПВТ) и пулемета ПКТ (ЦС ПКТ) осуществляется от бортовой сети +27 В от ОВН.
Работа по наведению блока оружия (БО) на цель осуществляется оператором вручную с помощью рукояток (Рук. ГН) и (Рук. ВН) редукторов ГН (Ред. ГН) и ВН (Ред. ВН) соответственно, и является нестабилизированным режимом наведения вооружения на цель. Эффективная стрельба из пулеметов КПВТ и ПКТ обеспечивается оператором только с места при одновременном стопорении им блока оружия (БО) и боевого модуля (БМ) при помощи стопора ВН (СТ-ВН) и стопора ГН (СТ-ГН) соответственно.
Недостатками вышеуказанного прототипа являются:
- малая эффективность ведения прицельного огня из пулеметов КПВТ и ПКТ при движении машины;
- недостаточная защищенность оператора БМ от ответного огня;
- отсутствие зоны разрешения выстрела и регулировки темпа стрельбы для пулеметов КПВТ и ПКТ, позволяющих в сумме значительно повысить эффективность стрельбы из каждого типа вооружения, сократив количество выпущенных боеприпасов, летящих мимо цели;
- отсутствие баллистического вычислителя, позволяющего вести стрельбу из пулеметов КПВТ и ПКТ с учетом факторов (балпоправок), влияющих на точность попадания в цель с первого выстрела;
- отсутствие блокировок по цепям стрельбы из пулеметов КПВТ и ПКТ, необходимых для обеспечения безопасности от поражения собственным вооружением экипажа ОВН при его выходе из шасси через собственные люки и элементов конструкции ОВН (шасси);
- неудобство в управлении ручными приводами при движении машины (вес БМ превышает 400 кг, что совместно с моментом трения в погоне приводит к возникновению значительных моментов на ручных рукоятках управления, которые должны компенсироваться за счет физической силы оператора);
- неудобство в управлении ручными приводами, вызванное их дистанционным расположением друг от друга, что не позволяет осуществлять одновременное наведение на цель КПВТ и ПКТ в плоскости ВН и ГН, исключая тем самым возможность сопровождения цели с последующим ее поражением;
- отсутствие автоматического приведения блока оружия и его стопорения на углах, определяемых удобством расположения при его загрузке новым боекомплектом и установкой его в походное положение;
- отсутствие возможности дистанционного наведения блока оружия;
- отсутствие режима автономной стабилизации;
- отсутствие информационных каналов обмена с другими устройствами и системами, что не позволяет значительно повысить эксплутационные характеристики стабилизатора вооружения и боевого модуля в целом.
Техническими задачами заявляемого изобретения являются:
- повышение эффективности ведения прицельного огня из установленного на стабилизаторе вооружения (СВ) для БМ вооружения, особенно при движении объекта военного назначения (ОВН);
- повышение защищенности оператора вооружения от ответного огня;
- повышение эффективности использования боеприпасов;
- уменьшение времени подготовки первого выстрела и повышение вероятности попадания его в цель;
- повышение безопасности экипажа и элементов конструкции ОВН от поражения собственным вооружением;
- повышение удобства управления установленным вооружением;
- обеспечение возможности одновременного стабилизированного наведения по ГН и ВН установленного вооружения на цель;
- обеспечение автоматического приведения и стопорения БМ с установленным вооружением на заданных конструкцией ОВН углах при его загрузке новым боекомплектом или установке в походное положение;
- обеспечение возможности дистанционного наведения блока оружия;
- обеспечение режима автономной стабилизации БМ и БО по собственным датчикам СВ в случае конструктивного отсутствия задающего устройства стабилизации (ЗУС) на объекте применения или переходе в данный режим при выходе из строя используемого внешнего задающего устройства стабилизации (ЗУС);
- повышение эксплутационных характеристик стабилизатора вооружения и БМ и возможности их совместной диагностики.
Для достижения заявляемого технического результата в стабилизатор вооружения (СВ) дистанционно управляемого боевого модуля (БМ), установленного на шасси и содержащего погон с установленным на нем редуктором ГН, блок оружия (БО), с установленными на нем пулеметами КПВТ и ПКТ, и кинематически связанного с боевым модулем (БМ) и редуктором ВН, дополнительно введены:
- задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС);
- блок управления (БУ);
- усилитель мощности (УМ);
- блок коммутации (БК);
- электродвигатель ГН (ЭД-ГН);
- электродвигатель ВН (ЭД-ВН);
- электромагнитный стопор ГН (ЭМ-СТ-ГН);
- электромагнитный стопор ВН (ЭМ-СТ-ВН);
- датчик положения ГН (ДП-ГН);
- датчик положения ВН (ДП-ВН);
- датчик абсолютной угловой скорости по ГН (ДУС-ГН);
- датчик абсолютной угловой скорости по ВН (ДУС-ВН);
- первая последовательная шина (ПШ1);
- вторая последовательная шина (ПШ2);
- третья последовательная шина (ПШ3);
- четвертая последовательная шина (ПШ4);
- прицел-дублер (ПД),
при этом в шасси дополнительно введены:
- аппаратура управления (АУ);
- видеосмотровое устройство (ВСУ),
причем задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС) электрически связано с первой последовательной шиной (ПТШ1), второй последовательной шиной (ПШ2) и бортовой сетью +27 В от ОВН,
блок управления (БУ) электрически связан с первой последовательной шиной (ПШ1), второй последовательной шиной (ПШ2), третьей последовательной шиной (ПШ3), четвертой последовательной шиной (ПШ4), усилителем мощности (УМ), блоком коммутации (БК) и бортовой сетью +27 В от ОВН,
усилитель мощности (УМ), в свою очередь, электрически связан с третьей последовательной шиной (ПШ3), блоком управления (БУ), электродвигателем ГН (ЭД-ГН), электродвигателем ВН (ЭД-ВН) и бортовой сетью +27 В от ОВН,
блок коммутации (БК), в свою очередь, электрически связан с третьей последовательной шиной (ПШ3), блоком управления (БУ), электромагнитным стопором ГН (ЭМ-СТ-ГН), электромагнитным стопором ВН (ЭМ-СТ-ВН), КПВТ, ПКТ и бортовой сетью +27 В от ОВН,
при этом электромагнитный стопор ГН (ЭМ-СТ-ГН) жестко механически связан с боевым модулем (БМ) и кинематически с погоном, а электромагнитный стопор ВН (ЭМ-СТ-ВН) жестко механически связан с боевым модулем (БМ) и кинематически с блоком оружия (БО),
причем электродвигатель ГН (ЭД-ГН) кинематически связан с редуктором ГН, жестко механически связанного с боевым модулем (БМ), а электродвигатель ВН (ЭД-ВН) кинематически связан с редуктором ВН, жестко механически связанного с боевым модулем (БМ), при этом редуктор ВН, в свою очередь, кинематически связан с блоком оружия (БО),
при этом прицел дублер (ПД) жестко механически связан с блоком оружия (БО) и электрически связан с первой последовательной шиной (ПШ1), аппаратурой управления (АУ) и бортовой сетью +27 В от ОВН,
а датчик положения ГН (ДП-ГН), с одной стороны, жестко механически связан с боевым модулем (БМ), с второй стороны, кинематически связан с погоном и, с третьей стороны, электрически связан с четвертой последовательной шиной (ПШ4),
при этом датчик положения ВН (ДП-ВН), с одной стороны, жестко механически связан с боевым модулем (БМ), со второй стороны, кинематически с блоком оружия (БО) и, с третьей стороны, электрически связан с четвертой последовательной шиной (ПШ4),
в свою очередь, датчик абсолютной угловой скорости по ГН (ДУС-ГН) жестко механически связан с боевым модулем (БМ) и электрически связан с четвертой последовательной шиной (ПШ4), а датчик абсолютной угловой скорости по ВН (ДУС-ВН) жестко механически связан с блоком оружия (БО) и электрически связан с четвертой последовательной шиной (ПШ4),
при этом аппаратура управления (АУ) электрически связана с первой последовательной шиной (ПШ1), прицелом-дублером (ПД), видеосмотровым устройством (ВСУ) и бортовой сетью +27 В от ОВН, а видеосмотровое устройство (ВСУ), в свою очередь, электрически связано с первой последовательной шиной (ПШ1).
Сопоставительный анализ с прототипом показывает, что заявляемый стабилизатор вооружения для дистанционно управляемого боевого модуля отличается наличием новых элементов, таких как:
- задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС);
- блок управления (БУ);
- усилитель мощности (УМ);
- блок коммутации (БК);
- электродвигатель ГН (ЭД-ГН);
- электродвигатель ВН (ЭД-ВН);
- электромагнитный стопор ГН (ЭМ-СТ-ГН);
- электромагнитный стопор ВН (ЭМ-СТ-ВН);
- датчик положения ГН (ДП-ГН);
- датчик положения ВН (ДП-ВН);
- датчик абсолютной угловой скорости по ГН (ДУС-ГН);
- датчик абсолютной угловой скорости по ВН (ДУС-ВН);
- первая последовательная шина (ПШ1);
- вторая последовательная шина (ПШ2);
- третья последовательная шина (ПШ3);
- четвертая последовательная шина (ПШ4);
- прицел-дублер (ПД);
в шасси дополнительно введены:
- аппаратура управления (АУ);
- видеосмотровое устройство (ВСУ), и их связями с другими элементами.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в стабилизатор вооружения позволяет:
- значительно улучшить качество управления приводами ВН и ГН и тем самым повысить эффективность ведения прицельного огня из установленного вооружения, особенно при движении объекта военного назначения с установленным стабилизатором вооружения для дистанционно управляемого боевого модуля, за счет введения в структуру приводов ВН и ГН дополнительных устройств, позволяющих обеспечить двухплоскостную стабилизацию и стабилизированное наведение установленного вооружения;
- значительно повысить защищенность оператора вооружения от ответного огня за счет его размещения в шасси ОВН;
- повысить эффективность использования боеприпасов установленного вооружения за счет введения в цепи стрельбы дополнительной блокировки по ошибке приводов ГН и ВН, а именно функции зоны разрешения выстрела, которая реализована в блоке управления и форма которой по ВН и ГН определяется выбранным (установленным) типом(типами) вооружения (КПВТ или ПКТ), а также за счет регулировки темпа стрельбы для пулеметов КПВТ и ПКТ;
- уменьшить время подготовки первого выстрела и повысить вероятность попадания его в цель за счет использования в структуре аппаратуры управления функции баллистического вычислителя, которая позволяет вести стрельбу из установленного вооружения с учетом баллистических поправок по ВН и ГН, влияющих на повышение точности ведения огня в зависимости от дальности, типа боеприпаса и условий стрельбы;
- исключить возможность поражения экипажа собственным вооружением и возможности нанесения установленным вооружением повреждений элементам конструкции боевого модуля ОВН, находящимся в зоне углов обметания (обстрела) установленного вооружения, за счет наличия датчика положения боевого модуля (БМ) по ГН (ДП-ГН) и датчика положения блока оружия (БО) по ВН (ДП-ВН), позволяющих ввести дополнительные блокировки по цепям стрельбы в любых секторах обстрела, заданных конструкцией БМ;
- повысить удобство в управлении установленным вооружением ОВН, за счет наличия возможности его дистанционно стабилизированного наведения на цель. Это достигается за счет наличия информационных каналов обмена с задающим устройством стабилизации (ЗУС) и прицелом дублером (ПД), расположенных на боевом модуле (БМ) и формирующих цифровое видеоизображение цели с нанесенной прицельной маркой на видеосмотровом устройстве (ВСУ) и наличия аппаратуры управления (АУ), расположенных в шасси ОВН. Аппаратура управления (АУ), в свою очередь, содержит пульт наведения, обеспечивающий наведение оператором марки задающего устройства стабилизации (ЗУС) или марки прицела-дублера (ПД) на цель;
- обеспечить возможность одновременного наведения по ГН и ВН установленного вооружения на цель за счет наличия электромеханических приводов по ВН и ГН и использования оператором пульта наведения аппаратуры управления (АУ);
- обеспечить автоматическое приведение и стопорение установленного вооружения на заданных конструкцией боевого модуля (БМ) ОВН углах, при его загрузке новым боекомплектом или установки в походное положение (выключение стабилизатора вооружения) за счет наличия электромеханических приводов по ВН и ГН, датчика положения боевого модуля (БМ) по ГН (ДП-ГН), датчика положения блока оружия (БО) по ВН (ДП-ВН) и электромагнитных стопоров по ГН и ВН соответственно (ЭМ-СТ-ГН), (ЭМ-СТ-ВН);
- обеспечить возможность дистанционного наведения блока оружия за счет введения в структуру стабилизатора вооружения дистанционно управляемого боевого модуля датчика положения блока оружия (БО) по ВН (ДП-ВН) и датчика положения боевого модуля (БМ) по ГН (ДП-ГН). Сигналы относительного положения установленного вооружения с датчиков положения по ВН и ГН (ДП-ВН) и (ДП-ГН) алгебраически суммируются с соответствующими сигналами датчиков положения независимого стабилизированного в пространстве инерциального объекта по ВН и ГН задающего устройства стабилизации (ЗУС) в блоке управления (БУ) и представляют собой сигналы ошибок по ВН и ГН, отрабатываемых электродвигателем ВН (ЭД-ВН) и электродвигателем ГН (ЭД-ГН) приводов ВН и ГН соответственно;
- обеспечить режим автономной стабилизации стабилизатора вооружения дистанционно управляемого боевого модуля, при выходе из строя используемого внешнего задающего устройства стабилизации (ЗУС) за счет наличия датчиков абсолютной угловой скорости по ГН и ВН (ДУС-ГН) и (ДУС-ВН), прицела-дублера (ПД) установленных в боевом модуле (БМ), а также видеосмотрового устройства (ВСУ) отображения видеоинформации и пульта наведения оператора аппаратуры управления (АУ), расположенных в шасси ОВН;
- повысить эксплутационные характеристики и возможности диагностики стабилизатора вооружения для дистанционно управляемого боевого модуля, за счет возможности подключения к нему как внешних, так и внутренних контрольных устройств по информационным каналам обмена в частности первой и второй последовательных шин (ПШ1) и (ПШ2) типа CAN и RS422.
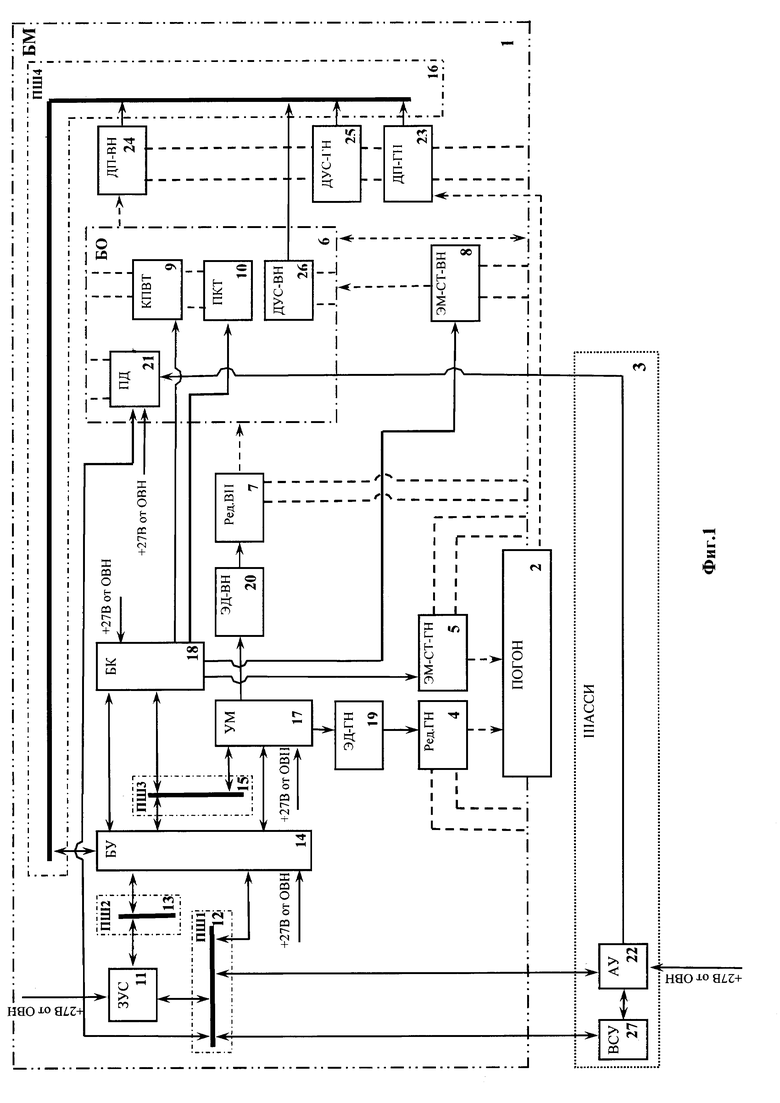
На Фиг. 1 приведена структурная схема заявляемого стабилизатора вооружения дистанционно управляемого боевого модуля.
Сокращения, принятые в тексте и на Фиг. 1:
АУ - аппаратура управления, содержащая пульт(ы) наведения оператора(ов) и баллистический вычислитель с набором датчиков;
БУ - блок управления;
БК - блок коммутации;
БМ - боевой модуль;
БО - блок оружия;
ВСУ - видеосмотровое устройство;
ВН - вертикальное наведение;
ГН - горизонтальное наведение;
ДП-ВН - датчик положения блока оружия по ВН;
ДП-ГН - датчик положения боевого модуля по ГН;
ДУС-ВН - датчик абсолютной угловой скорости по ВН;
ДУС-ГН - датчик абсолютной угловой скорости по ГН;
ЗУС - задающее устройство стабилизации с датчиками положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН;
КПВТ - пулемет КПВТ;
КУ - комплекс управления;
ОВН - объект военного назначения;
ПД – прицел-дублер;
ПКТ - пулемет ПКТ;
ПП - прицел перископический;
ПШ1 - первая последовательная шина;
ПШ2 - вторая последовательная шина;
ПШ3 - третья последовательная шина;
ПШ4 - четвертая последовательная шина;
Ред. ВН - редуктор ВН;
Ред. ГН - редуктор ГН;
Рук. ВН - рукоятка редуктора ВН;
Рук. ГН - рукоятка редуктора ГН;
СВ - стабилизатор вооружения;
СТ-ВН - механический стопор ВН;
СТ-ГН - механический стопор ГН;
УМ - усилитель мощности;
ЦС КПВТ - цепи стрельбы пулемета КПВТ;
ЦС ПКТ - цепи стрельбы пулемета ПКТ;
ЭМ-СТ-ВН - электромагнитный стопор ВН;
ЭМ-СТ-ГН - электромагнитный стопор ГН;
ЭД-ВН - электродвигатель ВН;
ЭД-ГН - электродвигатель ГН.
Заявляемый стабилизатор вооружения дистанционно управляемого боевого модуля представляет собой два независимо работающих привода наведения и стабилизации в плоскостях вертикального наведения ВН блока оружия (БО) и горизонтального наведения ГН боевого модуля (БМ).
Боевой модуль (БМ) 1 установлен на погоне 2 относительно шасси 3 машины. За счет этого боевой модуль (БМ) 1 имеет возможность поворачиваться на 360° относительно шасси 3 машины при помощи редуктора ГН (Ред. ГН) 4. Редуктор ГН (Ред. ГН) 4 механически связан с боевым модулем (БМ) 1 и кинематически с погоном 2. Для жесткой фиксации боевого модуля (БМ) 1 относительно шасси 3 машины используется электромагнитный стопор ГН (ЭМ-СТ-ГН) 5. Блок оружия (БО) 6 установлен в боевом модуле (БМ) 1 через цапфенный узел и при помощи редуктора ВН (Ред. ВН) 7 имеет возможность осуществлять наведение блока оружия (БО) 6 в вертикальной плоскости в пределах -5…+30°. Для жесткой фиксации блока оружия (БО) 6 в вертикальной плоскости относительно боевого модуля (БМ) 1 используется электромагнитный стопор ВН (ЭМ-СТ-ВН) 8. Блок оружия (БО) 6 включает в себя жестко установленные крупнокалиберный 14,5-мм пулемет (КПВТ) 9 и 7,62-мм пулемет (ПКТ) 10.
Задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС) 11 электрически связано с первой последовательной шиной (ПШ1) 12 типа CAN и второй последовательной шиной (ПШ2) 13 типа RS422. Задающее устройство стабилизации (ЗУС) 11 представляет собой прицел панорамного типа, установленный на боевом модуле (БМ) 6 и имеющий возможность независимого кругового обзора по ГН на 360° по ВН в пределах -15…+75°. Задающее устройство стабилизации (ЗУС) 11 может использоваться командиром и наводчиком-оператором для наблюдения за окружающей обстановкой, и для обеспечения режима ОСНОВНОЙ автоматического наведения и стабилизации блока оружия (БО) 6 в плоскостях ГН и ВН при движении машины по пересеченной местности.
Блок управления (БУ) 14 электрически связан с первой последовательной шиной (ПШ1) 12 типа CAN, второй последовательной шиной (ПШ2) 13 типа RS422, третьей последовательной шиной (ПШ3) 15 типа CAN, четвертой последовательной шиной (ПШ4) 16 типа CAN.
Дополнительно блок управления (БУ) 14 электрически связан с усилителем мощности (УМ) 17, блоком коммутации (БК) 18 и бортовой сетью +27 В от ОВН. Блок управления (БУ) 14 с помощью заданного алгоритма осуществляет управление приводами ГН и ВН в части наведения с заданными скоростями, реализации режима стабилизации блока оружия (БО) 6, а также через управление блоком коммутации (БК) 18 коммутацию цепей стрельбы пулеметов КПВТ 9 и ПКТ 10 с одновременным управлением электромагнитными стопорами при приведении вооружения на заданные конструкцией углы стопорения.
Усилитель мощности (УМ) 17 электрически связан с третьей последовательной шиной (ПШЗ) 15, блоком управления (БУ) 14, электродвигателем ГН (ЭД-ГН) 19, электродвигателем ВН (ЭД-ВН) 20 и бортовой сетью +27 В от ОВН. Усилитель мощности (УМ) 17 представляет собой сдвоенный усилитель для управления электродвигателями постоянного тока ГН (ЭД-ГН) 19 и ВН (ЭД-ВН) 20 соответственно приводов ГН и ВН.
Блок коммутации (БК) 18 электрически связан с третьей последовательной шиной (ПШЗ) 15, блоком управления (БУ) 14, электромагнитным стопором ГН (ЭМ-СТ-ГН) 5, электромагнитным стопором ВН (ЭМ-СТ-ВН) 8, КПВТ 9, ПКТ 10 и бортовой сетью +27 В от ОВН. Блок коммутации (БК) 18 по сигналам управления блока управления (БУ) 14 осуществляет силовую коммутацию цепей управления электромагнитными стопорами и цепями стрельбы КПВТ 9 и ПКТ 10.
Электромагнитный стопор ГН (ЭМ-СТ-ГН) 5 жестко механически связан с боевым модулем (БМ) 1 и кинематически с погоном 2. Электромагнитный стопор ВН (ЭМ-СТ-ВН) 8 жестко механически связан с боевым модулем (БМ) 1 и кинематически с блоком оружия (БО) 6. Электромагнитные стопоры представляют собой механизмы, предназначенные для жесткой фиксации боевого модуля (БМ) 1 и блока оружия (БО) 6 для походного положения машины и углов загрузки боеприпасов. Электромагнитные стопоры имеют ручной привод, для аварийного расстопоривания и застопоривания боевого модуля (БМ) 1 и блока оружия (БО) 6.
Электродвигатель ГН (ЭД-ГН) 19 кинематически связан с редуктором ГН (Ред. ГН) 4, а тот, в свою очередь, кинематически связан с погоном 2 боевого модуля (БМ) 1.
Электродвигатель ВН (ЭД-ВН) 20 кинематически связан с редуктором ВН (Ред. ВН) 7, который, в свою очередь, кинематически связан с блоком оружия (БО) 6.
Прицел-дублер (ПД) 21 жестко механически связан с блоком оружия (БО) 6 и электрически связан с первой последовательной шиной (ПШ1) 12, аппаратурой управления (АУ) 22 и бортовой сетью +27 В от ОВН. Прицел-дублер (ПД) 21 служит для обеспечения режима РЕЗЕРВНЫЙ стабилизированного наведения и стабилизации блока оружия (БО) 6 в плоскостях ГН и ВН при движении машины по пересеченной местности.
Датчик положения ГН (ДП-ГН) 23 жестко механически связан с боевым модулем (БМ) 1, кинематически с погоном 2 и электрически связан с четвертой последовательной шиной (ПШ4) 16. Датчик положения ВН (ДП-ВН) 24 жестко механически связан с боевым модулем (БМ) 1, кинематически с блоком оружия (БО) 6 и электрически связан с четвертой последовательной шиной (ПШ4) 16. Датчик положения представляет собой вращающийся трансформатор типа редуктосин с обмотками грубого и точного отсчета, со встроенной схемой обработки и возможностью одновременного формирования протоколов последовательной шины типа CAN и типа RS422.
Датчик абсолютной угловой скорости по ГН (ДУС-ГН) 25 жестко механически связан с боевым модулем (БМ) 1 и электрически связан с четвертой последовательной шиной (ПШ4) 16, а датчик абсолютной угловой скорости по ВН (ДУС-ВН) 26 жестко механически связан с блоком оружия (БО) 6 и электрически связан с четвертой последовательной шиной (ПШ4) 16. Датчик абсолютной угловой скорости представляет собой волоконно-оптический датчик со встроенной схемой обработки и возможностью одновременного формирования протоколов последовательной шины типа CAN и типа RS422.
Аппаратура управления (АУ) 22 с пультом наведения электрически связана с первой последовательной шиной (ПШ1) 12, прицелом-дублером (ПД) 21, которое, в свою очередь, электрически связано с первой последовательной шиной (ПШ1) 12. Пульт наведения аппаратуры управления (АУ) 22 представляет собой орган управления типа джойстик, служащий для наведения линии визирования задающего устройства стабилизации (ЗУС) 11, коммутации режимов работы и управление цепями стрельбы КПВТ 9 и ПКТ 10, а также выдачу сигнала через первую последовательную шину (ПШ1) 12 в блок управления (БУ) 14 для формирования в нем резервного режима стабилизированного наведения и стабилизации, и формирования сигналов рассогласования (ошибки) по ГН и ВН путем сложения с сигналами обратной связи от датчиков абсолютной угловой скорости с последующим алгебраическим интегрированием.
Видеосмотровое устройство (ВСУ) 27 служит для отображения информации, получаемой от телевизионных и тепловизионных камер задающего устройства стабилизации (ЗУС) 11 и прицела дублера (ПД) 21, а также другой служебной информации и представляет собой панель многофункционального устройства.
Большинство новых элементов стабилизатора вооружения для дистанционно управляемого боевого модуля реализованы как часть программного обеспечения контроллеров: блока управления (БУ), блока коммутации (БК), усилителя мощности (УМ), датчиков положения (ДП-ГН) и (ДП-ВН) и датчиков абсолютной угловой скорости (ДУС-ГН) и (ДУС-ВН), при этом обработка получаемых и передаваемых данных осуществляется несколькими контроллерами вычисления сигналов управления, положения и скорости, состоящих в основном из:
- формирователей сигналов последовательных шин типа CAN, RS422;
- формирователя сигнала широтно импульсного модулятора;
- дискретного ввода - вывода.
Процедура вычисления контроллером блока управления сигналов управления выполнена в виде подпрограмм управления со звеньями коррекции по ГН и ВН, представляющими собой цифровые фильтры 1-го и 2-го порядка, полученные билинейным преобразованием аналоговых прототипов, причем частота обработки полученных контроллером блока управления данных и выдача им сигналов управления через последовательную шину на усилитель мощности приводов ГН и ВН будут определяться заданной частотой циклов обработки сигналов блоком управления, а также частотой обмена по последовательным шинам с датчиками приводов ВН и ГН и задающего устройства стабилизации (ЗУС).
Выходной каскад усилителя мощности может быть выполнен по мостовой схеме, построенной на транзисторных ключах, управляемых в режиме широтно-импульсной модуляции (ШИМ) сигналами ШИМ, формируемыми контроллером ШИМ и усиленными драйверами ШИМ усилителя мощности.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию». - Пер. с англ. - М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники». - Пер. с англ. - 4-е изд., перераб. и доп. - М.: Мир, 1993).
Принцип действия приводов ГН и ВН стабилизатора вооружения (СВ) одинаков и основан на том, что каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением. Направление в горизонтальной и вертикальной плоскости, которое требуется придать установленному вооружению, является заданным значением регулируемого параметра для приводов ГН и ВН.
При движении объекта применения стабилизатора вооружения (СВ) на установленное вооружение действуют внешние возмущения в виде колебаний боевого модуля (БМ) с установленным вооружением, моментов трения в погоне, редукторах приводов ГН и ВН, электродвигателях приводов ГН и ВН, трения в цапфах (опорах) блока оружия (БО), а также возмущения, обусловленные неуравновешенностью боевого модуля (БМ) относительно центра его вращения и неуравновешенностью установленного вооружения блока оружия (БО) относительно оси цапф.
Эти возмущения вызывают отклонение установленного вооружения от заданного направления. Угол между заданным и действительным направлением, в этом случае, определяет ошибку стабилизации приводов ГН и ВН.
Напряжение, пропорциональное ошибке стабилизации, отрабатывается приводами ГН и ВН, поворачивающими боевой модуль (БМ) и блок оружия (БО) с установленным вооружением в сторону уменьшения ошибки.
Заявляемый стабилизатор вооружения дистанционно управляемого боевого модуля работает следующим образом.
Сигналы с датчиков положения независимого стабилизированного в пространстве инерциального объекта по ГН и ВН задающего устройства стабилизации (ЗУС), сигналы с пульта наведения (ПН) оператора, сигналы с датчиков абсолютной угловой скорости ГН и ВН, сигналы с датчика положения боевого модуля (БМ) по ГН и датчика положения блока оружия (БО) по ВН, сигналы с усилителя мощности (УМ) формируют в контроллере блока управления (БУ) сигналы относительного положения, сигналы по абсолютной угловой скорости, сигналы по абсолютному положению, сигналы скорости цели, сигналы обратных связей по скорости вращения вала и току электродвигателей по ГН и ВН, которые в соответствии с алгоритмом управления формируют ошибки приводов ГН и ВН.
Функция зоны разрешения выстрела, реализованная как подпрограмма в контроллере блока управления (БУ), анализирует амплитудные значения ошибок приводов ГН и ВН и скорость подхода установленного вооружения в блоке оружия (БО) к этой зоне и в случае превышения этих параметров свыше установленных значений блокирует цепи стрельбы выбранного вооружения, тем самым исключая возможность производства летящего мимо цели выстрела (даже при нажатой оператором кнопке стрельбы), что повышает эффективность использования боеприпасов.
Функция регулировки темпа стрельбы пулеметов КПВТ и ПКТ работает с учетом функции зоны разрешения выстрела и реализованная также в виде подпрограммы в контроллере блока управления (БУ), которая в зависимости от типа выбранного вооружения (КПВТ или ПКТ) формирует время подачи блоком коммутации (БК) импульса на электромагнит спуска соответствующего (КПВТ или ПКТ) пулемета.
Стабилизация в режиме ОСНОВНОЙ установленного в блоке оружия (БО) 6 вооружения осуществляется по сигналам задающего устройства стабилизации (ЗУС) 11, формирующего по второй последовательной шине (ПШ2) 13 типа RS422, в контроллере блока управления (БУ) 14 ошибки приводов по ГН и ВН, коммутируемые в соответствии с выбранным режимом работы ОВН по сигналам из пульта наведения оператора аппаратуры управления (АУ) 22.
Далее, полученные сигналы ошибок по ГН и ВН фильтруются и суммируются с соответствующими сигналами отрицательных обратных связей по абсолютной угловой скорости установленного вооружения по ГН и ВН, формируемых по сигналам с датчиков абсолютной угловой скорости (ДУС-ГН) 25, (ДУС-ВН) 26, установленных соответственно на боевом модуле (БМ) 1 и блоке оружия (БО) 6.
Причем контур ошибки привода ГН дополнительно охвачен сигналами отрицательных обратными связей по току и скорости вращения вала исполнительного электродвигателя ГН (ЭД-ГН) 19, формируемых датчиком тока и датчиком скорости вала электродвигателя ГН усилителя мощности (УМ) 17.
Контур ошибки привода ВН дополнительно охвачен сигналами отрицательных обратных связей по току и скорости вращения вала исполнительного электродвигателя ВН (ЭД-ВН) 20, формируемых датчиком тока и датчиком скорости вала электродвигателя ВН усилителя мощности (УМ) 17.
Указанные сигналы обратных связей позволяют повысить добротность и устойчивость приводов ГН и ВН, тем самым, обеспечив требуемое качество управления приводами ГН и ВН, что в сумме с цифровыми алгоритмами управления позволяет уменьшить ошибку стабилизации установленного вооружения в блоке оружия (БО) 6 по ВН и ГН.
Одновременно с указанными сигналами обратных связей в блок управления (БУ) 14 подаются сигналы относительной скорости установленного вооружения в блоке оружия (БО) 6 и боевого модуля (БМ) 1 соответственно по ВН и ГН, полученные корректирующими звеньями методом дифференцирования соответствующих сигналов с датчика положения вооружения по ВН (ДП-ВН) 24 и датчика положения боевого модуля (БМ) 1 по ГН (ДП-ГН) 23.
Полученные сигналы относительной скорости установленного вооружения в блоке оружия (БО) 6 по ВН и ГН, представляют собой обратную связь по возмущению, воздействующему соответственно на установленное вооружение в блоке оружия (БО) 6 и боевой модуль (БМ) 1 в плоскостях ВН и ГН при движении ОВН. Введение указанных обратных связей по возмущению в контуры управления приводами ВН и ГН позволяет дополнительно повысить точность стабилизации установленного вооружения.
Таким образом, полученные и обработанные в блоке управления (БУ) 14 сигналы управления по ГН и ВН поступают на усилитель мощности (УМ) 17, формирующие соответственно сигналы управления для исполнительного электродвигателя ГН (ЭД-ГН) 19, и исполнительного электродвигателя ВН (ЭД-ВН) 20.
Полученные сигналы управления по ГН и ВН преобразуются соответственно в силовые сигналы для управления обмотками электродвигателя ГН (ЭД-ГН) 19 и электродвигателя ВН (ЭД-ВН) 20, обеспечивающих вращение вала электродвигателя ГН (ЭД-ГН) 19 и электродвигателя ВН (ЭД-ВН) 20 соответственно.
Электродвигатель ГН (ЭД-ГН) 19 механически связан с редуктором ГН (Ред. ГН) 4, электродвигатель ВН (ЭД-ВН) 20 механически связан с редуктором ВН (Ред. ВН) 7, которые, в свою очередь, кинематически связаны соответственно с боевым модулем (БМ) 1 и блоком оружия (БО) 6, и поворачивают соответственно боевой модуль (БМ) 1 по ГН и установленное вооружение в блоке оружия (БО) 6 по ВН в сторону уменьшения ошибки стабилизации, тем самым, удерживая направление выбранного вооружения на цель, заданное задающим устройством стабилизации (ЗУС) 11 с учетом информации о баллистических поправках, вычисленных в блоке управления (БУ) 14.
Блок коммутации (БК) 18 по командам от блока управления (БУ) 14 и от пульта наведения оператора аппаратуры управления (АУ) 22 управляет цепями стрельбы КПВТ 9 и ПКТ 10, а также работой электромагнитных стопоров ГН (ЭМ-СТ-ГН) 5 и ВН (ЭМ-СТ-ВН) 8, которые обеспечивают фиксацию боевого модуля (БМ) 1 и блока оружия (БО) 6 при переводе изделия в походное положение, в положение для загрузки боеприпасов и в случае аварийного (рабочего) или несанкционированного оператором поведения приводов ГН и ВН.
Наведение в режиме ОСНОВНОЙ установленного в блоке оружия (БО) 6 вооружения осуществляется по сигналам задающего устройства стабилизации (ЗУС) 11, связанного электрически через первую последовательную шину (ПШ1) 12 с пультом наведения оператора по ГН, ВН аппаратуры управления (АУ) 22 и формирующего в блоке управления (БУ) 14 ошибки приводов по ГН и ВН. Наводчик (оператор) ОВН пультом наведения аппаратуры управления (АУ) 22 по ГН и ВН наводит стабилизированную в двух плоскостях линию визирования (прицельную марку) задающего устройства стабилизации (ЗУС) 11 на цель по изображению на видеосмотровом устройстве (ВСУ) 27. Сигналы с датчиков положения ГН и ВН задающего устройства стабилизации (ЗУС) 11, пропорциональные ошибкам стабилизации по ГН и ВН, отрабатываются приводами ГН и ВН, поворачивающими выбранное вооружение в сторону уменьшения ошибок ГН и ВН, аналогично рассмотренному выше режиму стабилизации в режиме ОСНОВНОЙ.
Для компенсации скоростной ошибки в плоскостях ГН и ВН сигнал с пульта наведения аппаратуры управления (АУ) 22 через первую последовательную шину (ПШ1) 12 поступает в контроллер блока управления (БУ) 14.
Стабилизация в режиме РЕЗЕРВНЫЙ осуществляется по сигналам датчиков абсолютной угловой скорости (ДУС-ГН) 25 и (ДУС-ВН) 24, жестко связанных соответственно с боевым модулем (БМ) 1 и блоком оружия (БО) 6. Сигналы датчиков абсолютной угловой скорости (ДУС-ГН) 25 и (ДУС-ВН) 24 подаются через четвертую последовательную шину (ПШ4) 16 в контроллер блока управления (БУ) 14. В контроллере блока управления (БУ) 14 производится обработка полученных сигналов с датчиков абсолютной угловой скорости (ДУС-ГН) 25 и (ДУС-ВН) 24 методом интегрирования. В результате значения абсолютной угловой скорости преобразуются в значения абсолютного углового положения (ошибки) по ГН и ВН. Полученные ошибки приводов по ГН и ВН фильтруются и суммируются с соответствующими коэффициентами с сигналами отрицательных обратных связей аналогично стабилизации в режиме ОСНОВНОЙ, и далее через третью последовательную шину (ПШ3) 15 поступают на усилитель мощности (УМ) 17. Алгоритм дальнейшей работы режима резервной стабилизации установленного вооружения приводами ГН и ВН аналогичен описанному выше основному режиму стабилизации.
Наведение в режиме РЕЗЕРВНЫЙ установленного в блоке оружия (БО) 6 вооружения осуществляется по сигналам наведения с пульта наведения оператора по ГН, ВН аппаратуры управления (АУ) 22. Сигналы по ГН и ВН с пульта наведения оператора аппаратуры управления (АУ) 22 через первую последовательную шину (ПШ1) 12 связаны с контроллером блока управления (БУ) 14, где производится их суммирование с соответствующими коэффициентами с интегралами сигналов датчиков абсолютной угловой скорости (ДУС-ГН) 25 и (ДУС-ВН) 24. Таким образом, полученные сигналы, пропорциональные ошибкам стабилизации по ГН и ВН, отрабатываются приводами ГН и ВН, поворачивающими установленное вооружение в сторону уменьшения ошибок по ГН и ВН, аналогично рассмотренному выше режиму наведения в режиме ОСНОВНОЙ.
Таким образом, заявляемый в качестве изобретения стабилизатор вооружения дистанционно управляемого боевого модуля дает возможность:
- значительно улучшить качество управления приводами ВН и ГН и тем самым повысить эффективность ведения прицельного огня из установленного вооружения, особенно при движении объекта военного назначения с установленным стабилизатором вооружения для дистанционно управляемого боевого модуля, за счет введения в структуру приводов ВН и ГН дополнительных устройств, позволяющих обеспечить двухплоскостную стабилизацию и стабилизированное наведение установленного вооружения;
- значительно повысить защищенность оператора вооружения от ответного огня за счет его размещения в шасси ОВН;
- поднять эффективность использования боеприпасов установленного вооружения, за счет введения в цепи стрельбы дополнительной блокировки по ошибке приводов ГН и ВН, а именно функции зоны разрешения выстрела, которая реализована в блоке управления и форма которой по ВН и ГН определяется выбранным (установленным) типом(типами) вооружения (КПВТ или ПКТ), а также за счет регулировки темпа стрельбы для пулеметов КПВТ и ПКТ;
- уменьшить время подготовки первого выстрела и повысить вероятность попадания его в цель за счет использования в структуре аппаратуры управления функции баллистического вычислителя, которая позволяет вести стрельбу из установленного вооружения с учетом баллистических поправок по ВН и ГН, влияющих на повышение точности ведения огня в зависимости от дальности, типа боеприпаса и условий стрельбы;
- исключить возможность поражения экипажа собственным вооружением и возможности нанесения установленным вооружением повреждений элементам конструкции боевого модуля ОВН, находящимся в зоне углов обметания (обстрела) установленного вооружения, за счет наличия датчика положения боевого модуля (БМ) по ГН (ДП-ГН) и датчика положения блока оружия (БО) по ВН (ДП-ВН), позволяющих ввести дополнительные блокировки по цепям стрельбы в любых секторах обстрела, заданных конструкцией БМ;
- повысить удобство в управлении установленным вооружением ОВН за счет наличия возможности его дистанционно стабилизированного наведения на цель. Это достигается за счет наличия информационных каналов обмена с задающим устройством стабилизации (ЗУС) и прицелом дублером (ПД), расположенных на боевом модуле (БМ) и формирующих цифровое видеоизображение цели с нанесенной прицельной маркой на видеосмотровом устройстве (ВСУ), и наличия аппаратуры управления (АУ), расположенных в шасси ОВН. Аппаратура управления (АУ), в свою очередь, содержит, пульт наведения, обеспечивающего наведение оператором марки задающего устройства стабилизации (ЗУС) или марки прицела дублера (ПД) на цель;
- обеспечить возможность одновременного наведения по ГН и ВН установленного вооружения на цель за счет наличия электромеханических приводов по ВН и ГН и использования оператором пульта наведения аппаратуры управления (АУ);
- обеспечить автоматическое приведение и стопорение установленного вооружения на заданных конструкцией боевого модуля (БМ) ОВН углах, при его загрузке новым боекомплектом или установки в походное положение (выключение стабилизатора вооружения), за счет наличия электромеханических приводов по ВН и ГН, датчика положения боевого модуля (БМ) по ГН (ДП-ГН), датчика положения блока оружия (БО) по ВН (ДП-ВН) и электромагнитных стопоров по ГН и ВН соответственно (ЭМ-СТ-ГН), (ЭМ-СТ-ВН);
- обеспечить возможность дистанционного наведения блока оружия за счет введения в структуру стабилизатора вооружения дистанционно управляемого боевого модуля датчика положения блока оружия (БО) по ВН (ДП-ВН) и датчика положения боевого модуля (БМ) по ГН (ДП-ГН). Сигналы относительного положения установленного вооружения с датчиков положения по ВН и ГН (ДП-ВН) и (ДП-ГН) алгебраически суммируются с соответствующими сигналами датчиков положения независимого стабилизированного в пространстве инерциального объекта по ВН и ГН задающего устройства стабилизации (ЗУС) в блоке управления (БУ) и представляют собой сигналы ошибок по ВН и ГН, отрабатываемых электродвигателем ВН (ЭД-ВН) и электродвигателем ГН (ЭД-ГН) приводов ВН и ГН соответственно;
- обеспечить режим автономной стабилизации стабилизатора вооружения дистанционно управляемого боевого модуля, при выходе из строя используемого внешнего задающего устройства стабилизации (ЗУС), за счет наличия датчиков абсолютной угловой скорости по ГН и ВН (ДУС-ГН) и (ДУС-ВН), прицела-дублера (ПД) установленных в боевом модуле (БМ), а также видеосмотрового устройства (ВСУ) отображения видеоинформации и пульта наведения оператора аппаратуры управления (АУ), расположенных в шасси ОВН;
повысить эксплутационные характеристики и возможности диагностики стабилизатора вооружения для дистанционно управляемого боевого модуля, за счет возможности подключения к нему как внешних, так и внутренних контрольных устройств по информационным каналам обмена, в частности первой и второй последовательных шин (ПШ1) и (ПШ2) типа CAN и RS422.
Приведенные в описании технические преимущества, целесообразность и надежность стабилизатора вооружения для дистанционно управляемого боевого модуля, реализованного по заявляемой структурной схеме, подтверждены испытаниями опытного образца на испытательной базе ОАО «СКБ ПА», ОАО «КЭМЗ» г. Ковров, АО «103 БТРЗ» г.п. Атамановское.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2014 |
|
RU2550407C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2016 |
|
RU2628038C2 |
Изобретение относится к области вооружения и военной техники, в частности к стабилизаторам вооружения дистанционного управления боевыми модулями (БМ). Стабилизатор вооружения дистанционно управляемого боевого модуля дополнительно содержит, связанные между собой, задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по горизонтальному наведению (ГН) и вертикальному наведению (ВН), блок управления, усилитель мощности, блок коммутации, электродвигатель ГН, электродвигатель ВН, электромагнитный стопор ГН, электромагнитный стопор ВН, датчик положения ГН, датчик положения ВН, датчик абсолютной угловой скорости по ГН, датчик абсолютной угловой скорости по ВН, первую последовательную шину, вторую последовательную шину, третью последовательную шину, четвертую последовательную шину, прицел-дублер, в шасси объекта военного назначения дополнительно введены аппаратура управления и видеосмотровое устройство. Достигается обеспечение дистанционного наведения установленного на БМ вооружения. 1 з.п. ф-лы, 1 ил., 1 прил.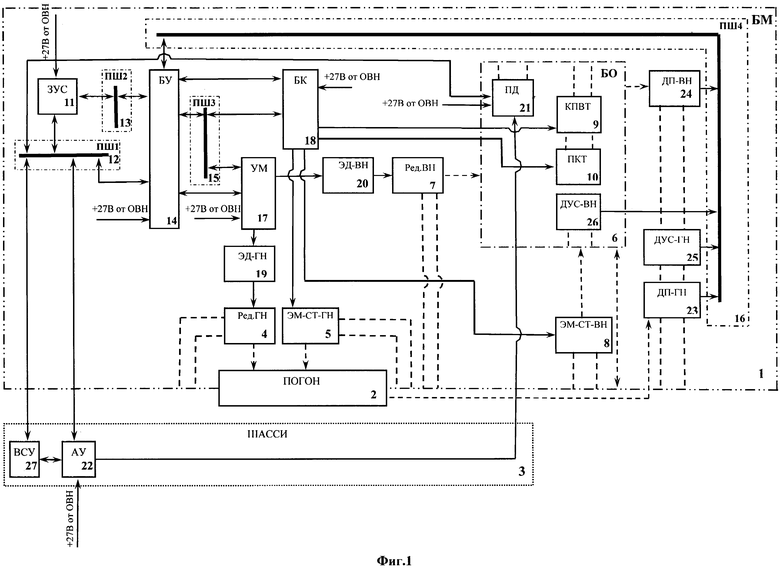
1. Стабилизатор вооружения дистанционно управляемого боевого модуля (БМ), установленного на шасси и содержащего погон с установленным на нем редуктором горизонтального наведения (ГН), блок оружия (БО) с установленными на нем пулеметами КПВТ и ПКТ, кинематически связанного с БМ и редуктором вертикального наведения (ВН), отличающийся тем, что в него дополнительно введены:
- задающее устройство стабилизации (ЗУС) с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН;
- блок управления (БУ);
- усилитель мощности (УМ);
- блок коммутации (БК);
- электродвигатель ГН (ЭД-ГН);
- электродвигатель ВН (ЭД-ВН);
- электромагнитный стопор ГН (ЭМ-СТ-ГН);
- электромагнитный стопор ВН (ЭМ-СТ-ВН);
- датчик положения ГН (ДП-ГН);
- датчик положения ВН (ДП-ВН);
- датчик абсолютной угловой скорости по ГН (ДУС-ГН);
- датчик абсолютной угловой скорости по ВН (ДУС-ВН);
- первая последовательная шина (ПШ1);
- вторая последовательная шина (ПШ2);
- третья последовательная шина (ПШ3);
- четвертая последовательная шина (ПШ4);
- прицел-дублер (ПД),
при этом в шасси дополнительно введены:
- аппаратура управления (АУ);
- видеосмотровое устройство (ВСУ),
причем ЗУС с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН электрически связано с ПШ1, ПШ2 и бортовой сетью +27 В от объекта военного назначения (ОВН), а БУ электрически связан с ПШ1, ПШ2, ПШ3, ПШ4, УМ, БК и бортовой сетью +27 В от ОВН, УМ в свою очередь электрически связан с ПШ3, БУ, ЭД-ГН, ЭД-ВН и бортовой сетью +27 В от ОВН, БК в свою очередь электрически связан с ПШ3, БУ, ЭМ-СТ-ГН, ЭМ-СТ-ВН, КПВТ, ПКТ и бортовой сетью +27 В от ОВН, при этом ЭМ-СТ-ГН жестко механически связан с БМ и кинематически с погоном, а ЭМ-СТ-ВН жестко механически связан с БМ и кинематически с БО, причем ЭД-ГН кинематически связан с редуктором ГН, жестко механически связанным с БМ, а ЭД-ВН кинематически связан с редуктором ВН, жестко механически связанным с БМ, при этом редуктор ВН в свою очередь кинематически связан с БО, при этом ПД жестко механически связан с БО и электрически связан с ПШ1, АУ и бортовой сетью +27 В от ОВН, а ДП-ГН, с одной стороны, жестко механически связан с БМ, с другой стороны, кинематически связан с погоном и, с третьей стороны, электрически связан с ПШ4, при этом ДП-ВН, с одной стороны, жестко механически связан с БМ, с другой стороны, кинематически с БО и, с третьей стороны, электрически связан с ПШ4, в свою очередь ДУС-ГН жестко механически связан с БМ и электрически связан с ПШ4, а ДУС-ВН жестко механически связан с блоком оружия БО и электрически связан с ПШ4, при этом АУ электрически связана с ПШ1, ПД, ВСУ и бортовой сетью +27 В от ОВН, а ВСУ в свою очередь электрически связано с ПШ1.
2. Стабилизатор вооружения дистанционно управляемого боевого модуля по п. 1, отличающийся тем, что в нем БМ установлен на неподвижное основание.
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| DE 3037337 A1, 23.04.1981 | |||
| US 5123327 A, 23.06.1992. | |||

