Область техники, к которой относится изобретение
Настоящее раскрытие относится, в целом, к области связи и, в частности, к методам осуществления позиционирования.
Уровень техники
Сети беспроводной связи широко используются для обеспечения различных услуг связи, например передачи голоса, видео, пакетных данных, обмена сообщениями, вещания и т.д. Эти беспроводные сети могут представлять собой сети множественного доступа, способные предоставлять услуги связи множественным пользователям за счет совместного использования имеющихся сетевых ресурсов. Примеры таких сетей множественного доступа включают в себя сети множественного доступа с кодовым разделением каналов (CDMA), сети множественного доступа с временным разделением каналов (TDMA), сети множественного доступа с частотным разделением каналов (FDMA) и сети ортогонального FDMA (OFDMA).
Часто бывает желательно, а иногда просто необходимо знать положение терминала в беспроводной сети. Термины "положение" и "позиция" являются синонимами и используются здесь взаимозаменяемо. Например, пользователь может использовать терминал для навигации по веб-сайту и может кликнуть на контент, зависящий от положения. Тогда положение терминала можно определить и использовать для предоставления пользователю соответствующего контента. Существует много других сценариев, в которых полезно или необходимо знать положение терминала.
Некоторые беспроводные сети, например сети CDMA, могут надежно поддерживать позиционирование. Эти беспроводные сети могут иметь большое количество базовых станций, которые передают сигналы, в которых закодирована информация хронирования. Положение терминала можно определить на основании измерений хронирования для достаточного количества базовых станций и известных фиксированных положений этих базовых станций. В некоторых беспроводных сетях положения передатчиков могут быть не известны, или может существовать неопределенность в положениях передатчиков. Тем не менее, определение положения терминала в такой беспроводной сети может быть желательным.
Сущность изобретения
Здесь описаны методы позиционирования точек доступа и терминалов в беспроводных локальных сетях (WLAN), а также в других беспроводных сетях. Позиционирование - это процесс измерения/вычисления оценки географического положения целевого устройства. Оценку положения также можно именовать оценкой позиции, фиксацией позиции и т.д.
Согласно одному аспекту для позиционирования точки доступа измерения получают для, по меньшей мере, одной точки доступа в WLAN. Измерения можно осуществлять на основании последовательностей передачи (например, кадров сигнала маяка), периодически передаваемых каждой точкой доступа. Измерения могут проводиться множественными терминалами в разных положениях или одним мобильным терминалом в разных положениях. Положение каждой точки доступа определяют на основании измерений и известных положений терминала(ов) и, дополнительно, согласно методу позиционирования, например методу измерения периода кругового обращения (учитывающему время прохождения сигнала в прямом и обратном направлении) (RTT), методу измерения наблюдаемой разницы во времени (OTD), методу измерения времени прихода сигнала (TOA) и т.д.
Согласно другому аспекту получают, по меньшей мере, одно положение, по меньшей мере, одного терминала, принимающего передачи от точки доступа. Положение точки доступа определяют на основании, по меньшей мере, одного положения, по меньшей мере, одного терминала и, возможно, дополнительной информации, например ограничения по дальности для технологии радиосвязи, используемой в WLAN, мощности передачи, используемой, по меньшей мере, одним терминалом или точкой доступа, и т.д.
Согласно еще одному аспекту для позиционирования терминала, получают измерения для, по меньшей мере, одной точки доступа в WLAN. Положение терминала определяют на основании измерений и, по меньшей мере, одного положения, по меньшей мере, одной точки доступа и, дополнительно, согласно методу позиционирования, например методу RTT, методу OTD, методу TOA, методу измерения уровня/качества сигнала, методу определения идентификатора точки доступа (AP ID) и т.д.
Согласно еще одному аспекту получается совокупность результатов определения положения (например, функции плотности вероятности) для совокупности методов позиционирования. Результаты определения положения объединяют для получения окончательного результата определения положения (например, окончательной функции плотности вероятности). Оценку положения для станции получают на основании окончательного результата определения положения.
Различные аспекты и признаки раскрытия более подробно описаны ниже.
Краткое описание чертежей
Фиг.1 - WLAN, которая поддерживает позиционирование.
Фиг.2A и 2B - позиционирование точки доступа.
Фиг.3 - измерение OTD терминалом для двух точек доступа.
Фиг.4 - измерения TOA посредством двух терминалов для точки доступа.
Фиг.5 - история перемещения для точки доступа.
Фиг.6 - размещение с определением положения в плоскости пользователя.
Фиг.7 - размещение с определением положения в плоскости управления.
Фиг.8 - процесс позиционирования одной или нескольких точек доступа.
Фиг.9 - процесс позиционирования точки доступа.
Фиг.10 - процесс позиционирования терминала.
Фиг.11 - процесс объединения результатов определения положения.
Фиг.12 - позиционирование WLAN путем определения положения в плоскости пользователя/управления.
Фиг.13 - точка доступа, терминал и сетевой сервер.
Подробное описание
Здесь описаны методы поддержки позиционирования в беспроводных сетях. Методы можно использовать для различных беспроводных сетей, например беспроводных локальных сетей (WLAN), беспроводных глобальных сетей (WWAN), городских сетей (WMAN), вещательных сетей и т.д. Термины "сеть" и "система" часто используются взаимозаменяемо. WWAN - это беспроводная сеть, которая обеспечивает покрытие для большой географической области, например города, штата или целой страны. WWAN может представлять собой сотовую сеть, например сеть CDMA, сеть TDMA, сеть FDMA, сеть OFDMA и т.д. В сети CDMA может быть реализована технология радиосвязи, например широкополосный CDMA (W-CDMA), cdma2000 и т.д. Стандарт cdma2000 охватывает стандарты IS-2000, IS-95 и IS-856. В сети TDMA может быть реализована технология радиосвязи, например Глобальная система мобильной связи (GSM), Цифровая усовершенствованная мобильная телефонная система (D-AMPS) и т.д. Стандарт D-AMPS охватывает стандарты IS-248 и IS-54. Эти различные технологии и стандарты радиосвязи известны в технике. Стандарты W-CDMA и GSM описаны в документах, изданных организацией под названием "3rd Generation Partnership Project" (3GPP). Стандарт cdma2000 описан в документах, изданных организацией под названием "3rd Generation Partnership Project 2" (3GPP2). Документы 3GPP и 3GPP2 общедоступны.
WLAN - это беспроводная сеть, которая обеспечивает покрытие для малой или средней географической области, например здания, супермаркета, кафе, аэропорта, школы, больницы и т.д. В WLAN может быть реализована технология радиосвязи, например, любая, отвечающая стандартам IEEE 802.11, Hiperlan и т.д. В WMAN может быть реализована технология радиосвязи, например, любая, отвечающая стандарту IEEE 802.16. IEEE 802.11 и IEEE 802.16 представляют собой два семейства стандартов, разработанных Институтом инженеров по электротехнике и электронике (IEEE). Семейство IEEE 802.11 включает в себя стандарты 802.11a, 802.11b, 802.11g и 802.11n и обычно именуется Wi-Fi. Каждый стандарт IEEE 802.11 определяет работу в конкретной полосе частот (например, 2,4 ГГц или 5 ГГц) с использованием одного или нескольких методов модуляции. Семейство IEEE 802.16 включает в себя стандарт 802.16e и обычно именуется WiMAX. Hiperlan - это технология WLAN, которая широко используется в Европе. Для простоты, нижеследующее описание, в основном, относится к WLAN.
На фиг.1 показана WLAN 100, которая поддерживает позиционирование. WLAN 100 включает в себя точки доступа (AP) 110, которые осуществляют связь с терминалами 120. Точка доступа - это станция, которая поддерживает услугу связи для терминалов, связанных с этой точкой доступа. Точку доступа также можно именовать базовой станцией. Для беспроводных технологий WMAN и WWAN точка доступа может именоваться узлом B, расширенным узлом B (eNode B), базовой приемопередающей подсистемой и т.д. Точки доступа 110 могут быть прямо или косвенно подключены к сетевому серверу 130, который может осуществлять различные функции для позиционирования. Сетевой сервер 130 может представлять собой единичный сетевой объект или совокупность сетевых объектов. В общем случае, WLAN может включать в себя любое количество точек доступа. Каждая точка доступа может идентифицироваться идентификатором точки доступа (AP ID), который может представлять собой глобально-уникальный адрес уровня управления доступом к среде (MAC), который включен в кадры, передаваемые точкой доступа, адрес Интернет-протокола (IP) и т.д.
Терминал - это станция, которая может осуществлять связь с другой станцией через беспроводную среду. Терминал может быть стационарным или мобильным, и его также можно именовать мобильной станцией, пользовательским оборудованием, абонентской станцией и т.д. Терминал может представлять собой сотовый телефон, карманный персональный компьютер (КПК), карманное устройство, беспроводное устройство, портативный компьютер, беспроводной модем, беспроводной телефон, телеметрическое устройство, устройство слежения и т.д.
Точка доступа или терминал также может принимать сигналы со спутников 140, которые могут составлять часть Глобальной системы позиционирования США (GPS), европейской системы Galileo, российской системы Glonass или какой-либо другой спутниковой системы позиционирования (SPS). Терминал может измерять сигналы от точек доступа 110 и/или сигналы от спутников 140. Измерения можно использовать для определения положения терминала и/или точек доступа, что описано ниже.
В общем случае, WLAN и/или связанные с нею терминалы могут поддерживать любое количество методов позиционирования и любой метод позиционирования. В Таблице 1 приведены некоторые методы позиционирования, которые могут поддерживаться WLAN и/или связанными с нею терминалами, и обеспечено краткое описание каждого метода.
В нижеследующем описании термин "GPS", в целом, относится к позиционированию на основе любой спутниковой системы позиционирования, например GPS, Galileo и т.д. Термин "A-GPS", в целом, относится к позиционированию на основе любой спутниковой системы позиционирования со вспомогательными данными.
Методы позиционирования можно использовать для (a) определения положений терминалов на основании известных положений точек доступа и/или (b) определения положений точек доступа на основании известных положений терминалов. Известные положения можно получать независимо с помощью GPS, A-GPS и т.д. Способность определять положения точек доступа на основании положений терминалов может быть весьма желательна, поскольку в настоящее время установлено большое количество WLAN, причем эти WLAN не всегда широко известны, и точки доступа могут перемещаться (т.е. не всегда фиксированы). Положения точек доступа можно определять и/или обновлять с помощью терминалов, поддерживающих независимые методы позиционирования, например GPS, A-GPS и т.д. Положения точек доступа можно использовать для определения положений терминалов, которые не поддерживают независимые методы позиционирования, например GPS, A-GPS и т.д.
Различные методы позиционирования могут поддерживаться терминалами и/или использоваться на сетевом сервере, например сетевом сервере 130, показанном на фиг.1, или на одной из точек доступа 110. Сетевой сервер может предписывать терминалам проводить измерения и может вычислять оценки положения для терминалов и/или точек доступа. На сетевом сервере также может храниться информация положения для терминалов и/или точек доступа, и он может использовать информацию положения для поддержки позиционирования.
1. Метод AP ID
Метод AP ID использует известные положения точек доступа в WLAN для определения положений терминалов. Положение можно задавать 2-мерными (x, y) или 3-мерными (x, y, z) географическими координатами. Положения точек доступа можно определить по-разному. В одной схеме положение точки доступа может определять оператор WLAN геодезическими средствами с использованием карты и т.д. В другой схеме положение точки доступа можно определить на основании метода позиционирования, например GPS, A-GPS и т.д.
На фиг.2A показана схема для позиционирования точки доступа на основании известных положений одного или нескольких терминалов, осуществляющих связь с точкой доступа. Зону покрытия для точки доступа можно определить на основании известных положений разных терминалов и/или разных известных положений одних и тех же терминалов. Положение точки доступа можно определить на основании всех известных положений терминалов, например средней широты (x) и средней долготы (y) положений терминалов. Во избежание смещения вследствие более высокой концентрации терминалов в одной области по сравнению с другими областями периметр зоны покрытия можно определить на основании положений самых внешних терминалов. Затем положение точки доступа можно задать как точку в области, ограниченной периметром, например центр тяжести ограниченной области.
На фиг.2B показана схема для позиционирования точки доступа на основании известного положения одного терминала. Положение терминала можно обеспечить как приблизительное положение точки доступа. Это приблизительное положение имеет погрешность или неопределенность, которая зависит от зоны покрытия точки доступа. Если технология WLAN известна (например, 802.11b, 802.11g и т.д.), то максимальное расстояние от терминала до точки доступа можно оценить на основании ограничения по дальности для технологии WLAN. Например, многие технологии 802.11 обычно имеют ограничения по дальности примерно от 50 до 100 метров. Затем положение точки доступа можно аппроксимировать положением терминала, причем фактическое положение точки доступа находится в круге с центром в положении терминала и радиусом, определяемым ограничением по дальности. Ограничение по дальности обычно задается для максимальной мощности передачи, допустимой для технологии WLAN. Поэтому меньший радиус (а значит, и меньшую неопределенность) можно использовать для круга, если известно, что точка доступа или терминал использует для связи мощность, меньшую максимальной мощности передачи.
В общем случае, положение точки доступа можно определить заранее (например, посредством картографии и геодезии) или в условиях эксплуатации, применяя любой из методов позиционирования в обратном направлении. В частности, положение точки доступа можно определить на основании одного или нескольких известных положений одного или нескольких терминалов, поддерживающих надежные и точные методы позиционирования, например GPS, A-GPS и т.д.
Метод AP ID может обеспечивать оценку положения терминала на основании идентификатора точки доступа, обслуживающей терминал или принимаемой на терминале, и известного положения точки доступа. Положение точки доступа можно обеспечивать как оценку положения терминала. Эта оценка положения имеет неопределенность, зависящую от зоны покрытия точки доступа, которую можно оценить на основании технологии WLAN, как описано выше. Точность оценки положения может зависеть от ограничения по дальности для технологии WLAN. Оценка положения может быть довольно точной для технологий WLAN с ограниченным покрытием (например, до 50 метров для некоторых технологий IEEE 802.11) и менее точной для технологий WLAN, WMAN и WWAN с увеличенной дальностью или использующих ретрансляторы для увеличения покрытия.
Положение точки доступа можно сделать доступным для терминалов в зоне покрытия и/или в других сетях. Например, в IEEE 802.11 WLAN точка доступа может включать свое положение в сигнал маяка, который периодически вещается на терминалы. В этом случае терминалы, которые могут принимать сигнал маяка, имеют возможность оценивать свои положения на основании положения точки доступа, полученной из сигнала маяка.
2. Метод RTT
Метод RTT обеспечивает оценку положения для станции на основании измерения RTT для одной или нескольких других станций и известных положений других станций. Например, терминал может измерять период кругового обращения для распространения радиосигнала между терминалом и одной или более точек доступа. Затем положение терминала можно определить на основании измерений RTT и известных положений точек доступа с использованием методов триангуляции.
Измерения RTT могут проводиться по-разному. Например, в IEEE 802.11v терминал передает сообщение (например, кадр Presence Request) на точку доступа и принимает от точки доступа квитанцию (например, кадр Presence Response). Квитанция может содержать задержку по времени, измеренную на точке доступа между временем приема последней части (например, последнего бита или элементарного сигнала (чипа)) сообщения с терминала и временем передачи первой части (например, первого бита или чипа) квитанции. Терминал может измерять задержку по времени между временем передачи последней части сообщения и временем приема первой части квитанции. Затем терминал может вычесть задержку по времени, сообщенную точкой доступа, из задержки по времени, измеренной терминалом, для получения измерения RTT. Также можно использовать другие схемы для измерения разницы во времени между отправкой данного сообщения и приемом ответа.
Положение точки доступа можно определить, получив измерения RTT для одного или нескольких терминалов с известными положениями и применив триангуляцию в обратном направлении. В этом случае, для каждого терминала с известным положением RTT до точки доступа может измеряться терминалом или точкой доступа. Затем положение точки доступа можно получить на основании измерений RTT, проводимых одними и теми же или разными терминалами в разных известных положениях с использованием триангуляции.
В общем случае, оценку положения для станции (например, терминала или точки доступа) можно получить методом RTT на основании измерений положения, полученных для одной или нескольких других станций. Оценка положения, полученная методом RTT, может быть значительно точнее, чем оценка положения, полученная методом AP ID. Метод RTT пытается точно определить положение станции, тогда как метод AP ID оценивает положение станции по всей зоне покрытия.
3. Метод OTD
Метод OTD обеспечивает оценку положения для станции на основании измерения OTD для других станций и известных положений других станций. Например, терминал может измерять наблюдаемую разницу в хронировании передачи между парами точек доступа. Эти измерения могут быть основаны на передачах, содержащих явную или неявную информацию хронирования от точек доступа. Эти передачи могут соответствовать кадрам сигналов маяка, периодически вещаемых точками доступа в WLAN согласно IEEE 802.11. Затем положение терминала можно получить на основании этих измерений с использованием трилатерации.
На фиг.3 показано измерение OTD на терминале i для двух точек доступа P и Q. Каждая точка доступа передает ряд последовательностей передачи, например последовательности двоичных кодированных данных. Каждая последовательность передачи содержит явное или неявное относительное начало отсчета времени. Точки доступа P и Q периодически могут передавать свои последовательности передачи с фиксированными интервалами повторения TP и TQ, соответственно. Длительность каждой последовательности передачи может быть меньше или равна интервалу повторения. Последовательности передачи регулярно повторяются в том смысле, что идентифицируемая структура информации регулярно повторяется, хотя повторяющаяся структура может содержать или не содержать повторяющуюся информацию. Например, каждая последовательность передачи может соответствовать кадру сигнала маяка согласно IEEE 802.11.
Точки доступа P и Q могут иметь относительно точные и стабильные часы, но они обычно не синхронизированы. Поэтому точные моменты времени отправки последовательностей передач могут быть не известны. Каждая последовательность передачи содержит маркер, который можно использовать в качестве начала отсчета времени. Маркер в последовательности передачи из точки доступа P обозначается как MP, и маркер в последовательности передачи из точки доступа Q обозначается как MQ. Маркеры MP и MQ могут находиться в начале, конце или середине соответствующих последовательностей передачи.
Терминал i принимает две последовательности передачи от точек доступа P и Q и идентифицирует маркеры в принятых последовательностях передачи. Два маркера, принятые терминалом i от точек доступа P и Q, обозначаются как MPi и MQi, соответственно. Терминал i измеряет разность между временем прихода маркера MPi от точки доступа P и временем прихода маркера MQi от точки доступа Q. Эта разница во времени прихода обозначается как OTDi.
Реальная разница во времени между маркерами MPi и MQi обозначается как RTDi и является разностью между абсолютными временами передачи этих маркеров от точек доступа P и Q. RTDi равна OTDi, если терминал i находится на равных расстояниях до точек доступа P и Q. В противном случае, RTDi и OTDi связаны с расстояниями между терминалом i и точками доступа P и Q и могут быть выражены в виде:


где T(Mki) - абсолютное время передачи маркера Mki от точки доступа k, для k=P или Q, и
A(Mki) - абсолютное время прихода маркера Mki в терминале i.
Уравнения (1) и (2) можно объединять следующим образом:
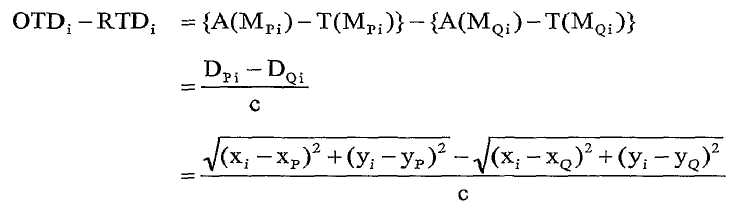
где Dki - расстояние между терминалом i и точкой доступа k,
(xk, yk) - горизонтальные координаты x, y положения точки доступа k,
(xi, yi) - горизонтальные координаты x, y положения терминала i, и
c - скорость распространения сигнала, например скорость света.
Для простоты, вертикальные координаты не учитываются в уравнении (3), но легко могут быть добавлены, что очевидно специалистам в данной области техники. В уравнении (3) OTDi может измеряться терминалом i, и все остальные переменные либо известны, либо их можно найти. Например, координаты терминала i можно получить независимо с использованием GPS, A-GPS и т.д. В этом случае уравнение (3) будет содержать пять неизвестных переменных - координаты x и y для каждой из двух точек доступа и RTD между маркерами MPi и MQi. Пять измерений OTD для одних и тех же маркеров MPi и MQi могут производиться пятью разными терминалами в разных известных положениях и использоваться для нахождения пяти неизвестных переменных. Альтернативно, пять измерений OTD могут проводиться одним терминалом в пяти разных известных положениях и использоваться для нахождения пяти неизвестных переменных. Таким образом, неизвестные координаты x, y двух точек доступа можно получить на основании пяти измерений OTD из одного или нескольких терминалов в разных известных положениях.
Разные терминалы обычно не получают измерения OTD для одних и тех же маркеров. Вместо этого разные терминалы обычно проводят измерения OTD в разные моменты времени на основании разных маркеров в разных последовательностях передачи. Один терминал, будучи подвижным, также может производить измерения OTD для разных маркеров в разные моменты времени, находясь в разных положениях. В любом случае, RTD маркеров, используемых для разных измерений OTD, проводимых в разные моменты времени, могут не быть одинаковыми.
Для измерений OTD, проводимых разными терминалами, RTD, применимые к любым двум терминалам i и j, для i≠j, связаны следующим образом:

где RTDi-RTDj - разность RTD для терминалов i и j, и
T(Mki)-T(Mkj) - интервал времени между двумя маркерами от точки доступа k.
Уравнение (4) указывает, что разность RTD для терминалов i и k можно получить на основании интервала времени между двумя разными маркерами от каждого из двух точек доступа. Интервал времени для каждой точки доступа можно определить при наличии двух маркеров в одной и той же последовательности передачи и известных моментах их появления в последовательности передачи. Интервал времени для каждой точки доступа также можно определить при наличии двух маркеров в разных последовательностях передачи, если (a) известен интервал времени от начала каждой последовательности передачи до соответствующего маркера и (b) известен интервал времени между началами двух последовательностей передачи. Условие (b) может выполняться, когда известен интервал повторения Tk между последовательными последовательностями передачи, и каждая последовательность передачи имеет порядковый номер. Если последовательности передачи пронумерованы, то можно сосчитать количество последовательностей от последовательности, содержащей первый маркер, до последовательности, содержащей второй маркер. Если последовательности передачи не пронумерованы, то может существовать неопределенность в значении разности RTD в уравнении (4). Эту неопределенность можно выразить как p*Tp+q*TQ, где TP и TQ - интервалы повторения для точек доступа P и Q, соответственно, и p и q могут иметь положительные или отрицательные целочисленные значения, соответствующие неизвестному количеству последовательностей между маркерами от точек доступа P и Q, соответственно. Если интервал повторения одинаков для обеих точек доступа, т.е. TP=TQ, и велики по сравнению с максимальным значением правой части уравнения (3) (так что задержка на распространение к любому терминалу много меньше интервала повторения), то неопределенность в разности RTD исчезает, поскольку только одно значение неопределенности (p+q)*TP будет обеспечивать решение уравнения (3).
Зная разность между любой парой RTD, можно использовать уравнение (3) для нахождения одной неизвестной RTD плюс четырех неизвестных координат x и y для двух точек доступа с помощью пяти измерений OTD. RTD для одного измерения OTD можно выразить как неизвестную переменную X. RTD для всех остальных измерений OTD можно выразить как X+K, где K можно определить из уравнения (4).
Точки доступа должны передавать свои последовательности передачи с высокой точностью хронирования/частоты и стабильностью, чтобы терминалы могли точно измерить измерения OTD. Последовательности передачи от пары точек доступа могут дрейфовать в течение времени в силу неточности часов в одной или обеих точках доступа. В этом случае RTD между маркерами от пары точек доступа будет изменяться со временем. RTD из двух маркеров, передаваемых от двух точек доступа P и Q в момент времени t, можно задать в виде:

где RTD(t) - это RTD между двумя маркерами, переданными в момент передачи t от точек доступа P и Q, и ai - коэффициент для 0≤i≤n и n>0.
Для линейного дрейфа RTD, который может являться самым распространенным типом дрейфа, ai будет равен нулю для i>1. Для квадратичного дрейфа RTD ai будет равен нулю для i>2. Обычно, коэффициенты более высокого порядка будут нулевыми или почти нулевыми. Количество переменных, относительно которых нужно решать уравнение (3), можно увеличить на количество неизвестных ненулевых коэффициентов в уравнении (5) для учета дрейфа RTD. Координаты точек доступа можно получить с помощью того же количества дополнительных измерений OTD из терминалов, положения которых известны.
Уравнение (3) также можно использовать для определения положения терминала, который получает измерения OTD от двух или более пар точек доступа с известными положениями. В этом случае, уравнение (3) будет содержать три неизвестные переменные - координаты x и y для терминала и RTD между маркерами от точек доступа. Количество уравнений можно сократить, если соотношения RTD между точками доступа известны или могут быть установлены, например, как описано выше или какими-либо другими способами. Например, решение относительно координат (xi, yi) терминала i можно найти из двух уравнений для двух пар точек доступа. Эти две пары можно сформировать из трех точек доступа, причем одна точка доступа является общей для двух пар. В уравнении для каждой пары точек доступа, из которого можно найти координаты (xi, yi) терминала i, координаты (xP, yP) и (xQ, yQ) точек доступа P и Q, образующих пару, известны, OTD для этих точек доступа можно измерить, и RTD для этих точек доступа может быть известно или определено.
Метод OTD использует измерения наблюдаемой разницы в хронировании передачи, произведенные терминалами, для пар точек доступа. Измерения могут проводиться в одно и то же время, в близкие моменты времени или, возможно, с разнесением по времени. Метод OTD может определять положения точек доступа с использованием измерений OTD от терминалов с известными положениями. Метод OTD также может определять положения терминалов с использованием измерений OTD от терминалов и известных положений точек доступа. Терминал может измерять передачи от двух или более точек доступа, если положения точек доступа определены, и от трех или более точек доступа, если положение терминала определено.
Преимущество метода OTD состоит в том, что он не предусматривает участия точек доступа и сетей доступа (AN) WLAN. Это избавляет от необходимости видоизменять существующие реализации и стандарты WLAN. Кроме того, отсутствует необходимость в какой-либо явной сигнализации от терминалов к точкам доступа. Тем не менее, метод OTD может поддерживаться с помощью сетевого сервера, например сетевого сервера 130, показанного на фиг.1. Сетевой сервер может предписывать терминалу проводить измерения OTD и может принимать измерения от терминала. Сетевой сервер может осуществлять вычисления, связанные с определением положения, как описано выше, для нахождения положений терминалов и/или положений точек доступа с использованием измерений OTD, например, как показано в уравнении (3).
Метод OTD можно использовать для любой технологии WLAN, которая предусматривает передачу явной или неявной информации хронирования. Информацию хронирования можно обеспечивать посредством структур повторяющихся кадров, повторяющихся кадров, другой идентифицируемой информации, содержащей счетчик или данные, связанные с хронированием, и т.д. Измерения OTD могут проводиться для пар точек доступа. Точки доступа в каждой паре могут поддерживать одинаковые или разные технологии WLAN при условии, что измерение OTD может относиться к идентифицируемым маркерам в передаче с каждой точки доступа.
Метод OTD может быть аналогичен методу расширенной наблюдаемой разницы во времени (E-OTD) для сетей GSM, методу наблюдаемой разницы во времени прихода (OTDOA) для сетей W-CDMA и методу усовершенствованной трилатерации прямой линии связи (A-FLT) для сетей cdma2000. Методы E-OTD, OTDOA и A-FLT позволяют определить только положения терминалов и опираются на информацию о положениях базовых станций. Напротив, метод OTD позволяет определять положения терминалов, а также точек доступа, и его можно использовать для WLAN, а также других беспроводных сетей, например сетей GSM, W-CDMA и cdma2000.
4. Метод TOA
Метод TOA обеспечивает оценку положения для станции на основании измерений TOA для одной или нескольких других станций и известных положений других станций. Например, терминал может измерять время прихода маркера от каждой из множественных точек доступа и может связывать абсолютное время с каждым маркером. Терминал может получать абсолютное время с использованием, например, GPS, A-GPS и т.д. Затем положение терминала можно получить на основании измерений с использованием трилатерации.
На фиг.4 показаны измерения TOA, произведенные двумя терминалами i и k в разных положениях для одной точки доступа P. Точка доступа P передает ряд последовательностей передачи, причем каждая последовательность передачи имеет маркер. Терминал i принимает последовательность передачи из точки доступа P. Маркер в последовательности, принятой терминалом i, обозначается как MPi. Терминал j принимает последовательность передачи из точки доступа P. Маркер в последовательности, принятой терминалом j, обозначается как MPj. Маркер MPi может быть идентичным маркеру MPj или отличным от него. Каждый терминал m, для m=i или j может определять абсолютное время прихода A(MPm) маркера MPm, принятого этим терминалом от точки доступа P на основании абсолютного времени, известного терминалу. A(MPm) представляет измерение TOA, проведенное терминалом m для точки доступа P.
OTD между абсолютным временем прихода маркера MPi в терминале i и абсолютным временем прихода маркера MPj в терминале j обозначается как OTDij. RTD между абсолютными моментами времени передачи маркеров MPi и MPj от точки доступа P обозначается как RTDij. OTDij и RTDij можно выразить в виде:


где T(MPm) - абсолютное время передачи маркера MPm от точки доступа P, и
A(MPm) - абсолютное время прихода маркера MPm в терминал m.
Уравнения (6) и (7) можно объединять следующим образом:
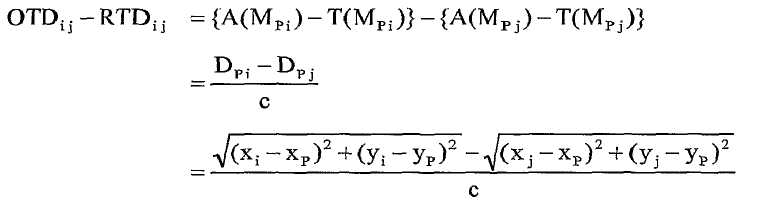
где DPm - расстояние между терминалом m и точкой доступа P,
(xP, yP) - горизонтальные координаты x, y положения точки доступа P, и
(xm, ym) - горизонтальные координаты x, y положения терминала m.
Для простоты, вертикальные координаты не учитываются в уравнении (8), но легко могут быть добавлены, что очевидно специалистам в данной области техники. Абсолютные моменты времени прихода A(MPi) и A(MPj) могут определяться терминалами i и j и использоваться для вывода OTDij согласно уравнению (6). RTDij в уравнении (7) можно легко получить, поскольку она связана с передачами от одной и той же точки доступа. RTDij можно определить на основании интервала повторения TP между последовательными последовательностями передачи, передаваемыми точкой доступа P. В уравнении (8) можно получить OTDij и RTDij, и все остальные переменные либо известны, либо их можно найти. Например, координаты терминалов i и j можно получить независимо с использованием GPS, A-GPS и т.д. В этом случае уравнение (8) будет содержать две неизвестные переменные - координаты x и y точки доступа P. Три измерения TOA, проведенные тремя разными терминалами в разных известных положениях, можно использовать для составления двух уравнений (с одним общим терминалом для обоих уравнений), которые затем можно использовать для определения двух неизвестных переменных для координат x, y точки доступа P. Три измерения TOA, проведенные одним терминалом в разных известных положениях, также можно использовать для определения координат точки доступа. Положения точек доступа, определенные на основании метода TOA, можно использовать для определения положений терминалов с использованием RTT, OTD, TOA или других методов позиционирования.
Метод TOA позволяет определить положение точки доступа на основании измерений TOA именно для этой точки доступа. Это желательно в сценариях, где терминал может измерять передачи только от одной точки доступа. Метод TOA связывает время прихода маркера от точки доступа с абсолютным временем, например временем GPS. Метод TOA не требует взаимодействия между терминалами и точками доступа.
Уравнение (8) также можно использовать в обратном направлении для определения положения терминала с использованием известных положений точек доступа. В этом случае три или более точек доступа получают абсолютные измерения TOA для маркеров передачи, передаваемых терминалом. Уравнение (8) можно применять к точкам доступа вместо терминалов (например, терминалов i и j) и к терминалу вместо точки доступа (например, точки доступа P).
Сетевой сервер, например сетевой сервер 130, показанный на фиг.1, может предписывать терминалам и/или точкам доступа производить измерения TOA и может принимать измерения от терминалов и/или точек доступа. Затем сетевой сервер может производить вышеописанные вычисления, связанные с определением положения, для определения положений терминалов и/или точек доступа.
5. Метод измерения уровня/качества сигнала
Метод измерения уровня/качества сигнала обеспечивает оценку положения для станции на основании измерений уровня сигнала и/или качества сигнала для одной или нескольких других станций и известных положений других станций. Положение станции можно определить с использованием совпадения шаблонов, которое описано ниже.
Терминал может регистрировать идентификаторы всех точек доступа, которые терминал может принимать в конкретном положении. Терминал также может измерять уровень сигнала и/или качество сигнала для каждой точки доступа, принимаемой терминалом. Уровень сигнала можно количественно оценивать по принимаемой мощности, которую можно выражать в дБм. Качество сигнала можно количественно оценивать по отношению сигнал-шум (SNR), отношению энергии бита к полному шуму (Eb/No), частоте битовой ошибки (BER), частоте пакетной ошибки (PER), наблюдаемым ошибкам сигнализации и т.д. Качество сигнала можно выражать двоичным значением, которое указывает, превышает ли качество сигнала данный порог, например достаточно ли качество сигнала для декодирования идентификатора AP. Положение терминала также можно получить с использованием независимого средства, например GPS, A-GPS и т.д. Терминал может сообщать свое положение, идентификаторы принимаемых точек доступа и измерение уровня/качества сигнала для каждой точки доступа.
Сетевой сервер, например сетевой сервер 130, показанный на фиг.1, может принимать отчеты от разных терминалов и/или отчеты от одного и того же терминала в разных положениях. Сетевой сервер может строить базу данных точек доступа, принимаемых в разных положениях, и соответствующих показателей уровня/качества сигнала. Географическую область, представляющую интерес, можно разбить на малые участки или пиксели. Участки могут иметь любую форму (например, квадратную, прямоугольную, шестиугольную и т.д.), и также могут иметь любой размер (например, несколько метров в поперечнике). Положение, сообщаемое терминалом, можно отображать в один пиксель (например, пиксель, содержащий координаты положения терминала) или в малое множество пикселей (например, пикселей, включенных в предполагаемую область местонахождения терминала). Идентификаторы точек доступа и показатели уровня/качества сигнала можно связать с пикселем(ями), на которые отображается положение терминала. Если поступают отчеты от множественных терминалов для одного и того же пикселя или множества пикселей, то измерения в этих отчетах можно объединять (например, усреднить), и можно сохранить объединенные измерения для пикселя(ей). Например, показатели уровня сигнала можно усреднить с использованием усреднения по времени со скользящим взвешиванием, где весовые коэффициенты могут зависеть от вероятности того, что данное положение терминала правильно отображается в конкретный пиксель. Показатели качества сигнала также можно усреднить. Например, если используется один порог качества сигнала, то качество сигнала в целом может выражать процент терминалов, для которых порог превышен.
Базу данных можно использовать для позиционирования терминалов. Сетевой сервер может получать от терминала идентификаторы точек доступа, принимаемых терминалом, и, возможно, показатели уровня/качества сигнала для этих точек доступа. Сетевой сервер производит поиск в базе данных на предмет пикселей, маркированных сообщенными идентификаторами точек доступа. Сетевой сервер может искать конкретные совпадения шаблонов для точек доступа, идентифицированных терминалом, и может игнорировать неидентифицированные точки доступа. Затем сетевой сервер может идентифицировать пиксели, связанные с усредненными показателями уровня/качества сигнала, которые лучше всего совпадают с сообщенными показателями уровня/качества сигнала. Сетевой сервер может учитывать тот факт, что разные терминалы могут иметь разную чувствительность. Результатом поиска может быть множество пикселей, не обязательно непрерывное, представляющее возможные положения терминала совместно с вероятностью того, что каждый пиксель действительно отражает верное положение. Сетевой сервер может выводить единую оценку положения, которая минимизирует предполагаемую погрешность определения положения (или среднеквадратическую ошибку).
Сетевой сервер может предписывать терминалам получать измерения уровня/качества сигнала и может принимать измерения от этих терминалов. Сетевой сервер может строить и/или обновлять базу данных и производить вычисления, связанные с определением положения, для определения положений терминалов.
6. Метод ID соты для A-GPS
Метод A-GPS предоставляет терминалам вспомогательные данные, помогающие терминалам захватывать и измерять сигналы GPS и/или вычислять оценки положения из результирующих измерений. Вспомогательные данные также можно использовать для поддержки позиционирования с помощью других спутниковых систем позиционирования, например европейской системы Galileo. Приблизительное положение терминала обычно необходимо для предоставления терминалу соответствующих вспомогательных данных. Например, знать положение терминала с точностью до нескольких километров необходимо для обеспечения вспомогательных данных захвата и вспомогательных данных хронирования GPS-GSM или GPS-WCDMA, используемых для поддержки A-GPS в сетях GSM и W-CDMA. Любые описанные здесь методы позиционирования можно использовать для определения положения терминала с нужным уровнем точности. Однако для выполнения одного из этих методов позиционирования требуется некоторое время, и, в случае успеха, результирующая оценка положения может быть значительно точнее, чем необходимо для поддержки A-GPS.
Различные методы позиционирования с коротким временем отклика могут обеспечивать доставку грубых оценок положения, пригодных для поддержки A-GPS. Согласно методу ID соты терминал получает глобально-уникальные идентификаторы одной или нескольких сот в сотовой сети, например сети GSM, W-CDMA или cdma2000. Терминал может обнаруживать соты с использованием двухрежимной функции и может принимать сотовые сигналы (например, из сетей GSM, W-CDMA и/или cdma2000) параллельно с сигналами WLAN. Альтернативно, терминал может временно приостанавливать прием сигналов WLAN (например, когда он не нужен или не запланирован), переключаться на сотовую связь, искать сотовые сигналы и декодировать принятые сотовые сигналы. Точка доступа, обслуживающая терминал, или сеть, обслуживающая терминал через WLAN, также может предоставлять терминалу идентификаторы сот, в зоне покрытия которых находится терминал. Это можно осуществлять путем добровольной рассылки или двухточечной сигнализации, или по запросу терминала. Соты, обнаруженные терминалом, могут включать в себя соты, в зонах покрытия которых терминал находится в данный момент времени, и/или соты, недавно обнаруженные терминалом, когда он находился вблизи текущего положения.
Идентификаторы сот для современных сотовых технологий могут быть глобально-уникальными. Идентификатор соты можно отображать на конкретное положение в соте, например положение антенны базовой станции соты. Это положение в соте можно обеспечивать в качестве грубой оценки положения для терминалов в соте. Оценка положения имеет погрешность, определяемую размером соты.
В базе данных могут храниться положения сот в одной или нескольких сотовых сетях. Базу данных можно упростить, сохраняя положения групп сот, например областей положений в GSM или W-CDMA. Положения сот (или положения групп сот) также можно получить путем позиционирования терминалов с использованием другого метода (например, A-GPS, GPS и т.д.), получения идентификаторов близлежащих сот от терминалов и с использованием положений терминалов для положений сот.
Терминал также может обеспечивать, помимо идентификатора соты, измерения опережения в хронировании (TA), периода кругового обращения, уровня сигнала, качества сигнала и т.д. для каждой обнаруженной соты. Эти измерения могут храниться в базе данных и использоваться для определения ближайшей соты. Измерения также можно использовать для метода RTT и метода уровня/качества сигнала для более точного определения положения терминала, чем с помощью одного лишь идентификатора соты.
Сетевой сервер может предписывать терминалам получать и сообщать идентификаторы близлежащих сот. Сетевой сервер может строить и/или обновлять базу данных, связывая сообщенные идентификаторы сот с известными положениями терминалов, которые можно получить с использованием GPS, A-GPS и т.д.
7. Объединение результатов разных методов позиционирования
Положение станции (например, терминала или точки доступа) можно определить с использованием нескольких методов позиционирования. Более точную и надежную оценку положения станции можно получить путем объединения результатов определения положения согласно этим нескольким методам позиционирования. Для метода уровня/качества сигнала результат определения положения может представлять собой множество возможных положений (например, пикселей), с каждым из которых связана вероятность появления. Для методов RTT, OTD и TOA, а также методов GPS и A-GPS, результат может представлять собой единичное положение с окружающей областью (например, в форме круга или эллипса), в которой фактическое положение предполагается с определенной вероятностью. Каждый результат определения положения можно преобразовать в функцию плотности вероятности (PDF), которая обеспечивает, для каждого возможного положения, вероятность того, что станция действительно находится в этом положении. Функции плотности вероятности для всех методов позиционирования можно объединять и использовать для получения окончательной оценки положения станции.
Множественные результаты определения положения можно получить для терминала на основании множественных независимых множеств измерений, M1, M2,... MN, где N≥2. Каждое множество измерений можно использовать для получения результата определения положения. Далее можно задать:
E = событие нахождения терминала в точке (x,y)
Fn(x,y) = функция плотности вероятности (PDF) для положения терминала в точке (x, y) на основании множества измерений Mn, для 1≤n≤N, и
F(x,y)=PDF для положения терминала в точке (x,y) на основании всех N множеств измерений M1, M2,..., MN.
Fn(x,y) соответствует результату определения положения, полученному с помощью множества измерений Mn. F(x,y) можно определить путем объединения Fn(x,y) для 1≤n≤N, для всех N результатов определения положения.
Множества измерений можно предположить независимыми, в связи с чем для любого событие положения E каждое множество измерений имеет определенную вероятность появления, зависящую от события E, которая дополнительно не зависит от какого-либо другого множества измерений. Это условие можно задать в виде:
где P(a/b) - вероятность события a при условии наступления события b.
Результаты определения положения для всех N множеств измерений можно объединять следующим образом.
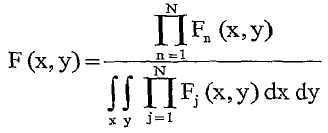
Уравнение (10) дает равный вес результатам разных методов позиционирования.
Результаты определения положения для всех множеств измерений также можно объединить, по-разному взвешивая разные методы позиционирования, следующим образом.
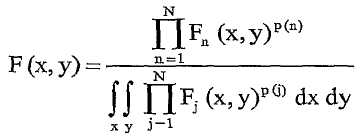
где p(n) - весовой коэффициент для множества измерений Mn для 1≤n≤N.
Весовой коэффициент можно задать как 0≤p(n)≤1. Малое значение p(n) можно использовать для менее надежного метода позиционирования, и большое значение p(n) можно использовать для более надежного множества измерений. Взвешивание можно опустить, если PDF Fn(x,y) уже отражают точность и надежность результатов определения положения. Например, взвешивание можно опустить при объединении оценок положения, полученных с использованием метода OTD и методов GPS или A-GPS после точного и согласованного определения положений точек доступа (для метода OTD) в течение периода времени. Взвешивание можно применять при объединении оценок положения, полученных теми же методами позиционирования, до того как положения точек доступа будут признаны надежными. В этом случае, методу OTD можно присвоить меньший вес.
Сетевой сервер может получить от терминала несколько множеств измерений для разных методов позиционирования, например A-GPS, RTT, OTD, TOA, уровня/качества сигнала и т.д. Сетевой сервер может осуществлять вычисления, связанные с определением положения, для каждого метода позиционирования и может объединять результаты для всех методов позиционирования в более точную информацию положения, как описано выше.
8. Оценивание надежности информации положения
Некоторые из вышеописанных методов позиционирования могут обеспечивать относительно точные оценки положения для точек доступа. Однако в отличие базовых станций в сотовых сетях точка доступа в WLAN может представлять собой сравнительно небольшое устройство, которое можно легко перемещать. Оператор WLAN может периодически перемещать точки доступа для улучшения покрытия, возможности добавления или перенастройки одной или нескольких WLAN. Когда это происходит, любое положение терминала, полученное с использованием любого метода позиционирования, который зависит от положений перемещающихся точек доступа, может быть неточным.
Для решения этой проблемы подвижности положение точки доступа можно периодически проверять путем определения положения точки доступа с использованием любого пригодного метода позиционирования и сравнения текущего положения с предыдущим положением точки доступа. Если два положения согласованы или, по меньшей мере, не являются несогласованными, то можно предположить, что точка доступа не переместилась. Если два положения не согласованы, то можно сохранять новое положение и время, когда оно было получено. Затем новое положение можно проверить и, если оно подтверждается достаточное количество раз, его можно признать верным. Можно предположить, что точка доступа переместилась до того, как в первый раз обнаружено новое положение.
Моменты времени и частоту перемещений точки доступа в данной области можно определять и сохранять. Полученную информацию истории перемещения можно использовать для прогнозирования в любое данное время вероятности того, что данная точка доступа переместилась в отсутствие какого-либо надежного средства проверки перемещения. Перемещение точки доступа можно прогнозировать на основании информации истории перемещения только для этой точки доступа или всех точек доступа в данной области.
На фиг.5 показана история перемещения для точки доступа в одномерном пространстве, упрощенно представляющая фактические 2- или 3-мерные положения. Точка доступа первоначально находится в положении L0 в момент времени T0. Точка доступа перемещается в положение L1 в момент времени T1, затем в положение L2 в момент времени T2, и затем в положение L3 в момент времени T3. Проверяется нахождение точки доступа в положении L3 в момент времени T4. В более позднее время T5 желательно оценить вероятность того, что точка доступа все еще находится в положении L3 или, эквивалентно, вероятность того, что точка доступа переместилась.
Информацию истории положения для точки доступа можно, частично или полностью, использовать для определения вероятности текущего положения. Например, можно использовать время (T4-T3), в течение которого точка доступа находилась в положении L3, совместно с временем (T5-T4), в течение которого точка доступа могла перемещаться. Альтернативно, промежутки времени (T3-T2), (T2-T1) и (T1-T0) между перемещениями можно использовать для определения статистики интервала времени, в течение которого точка доступа находилась в данном положении. Аналогичную статистику также можно получить для других точек доступа и использовать для определения вероятности текущего положения этой точки доступа.
Вероятность перемещения данной точки доступа k можно определить по-разному. Если точка доступа k перемещалась несколько раз, то можно получить среднюю продолжительность времени D, в течение которого точка доступа k находилась в каком-либо положении. Можно предположить, что вероятность перемещения точки доступа k в любое время не зависит ни от момента времени, ни от времени, проведенного в текущем положении. Тогда перемещение точки доступа можно представить как статистический процесс, подчиняющийся распределению Пуассона. В этом случае вероятность Pk того, что положение точки доступа k остается постоянным в течение времени t, можно задать в виде: Pk=e-t/D, и вероятность того, что точка доступа k переместилась спустя время t, после последней проверки положения можно задать в виде: 1-e-t/D. Если перемещение точки доступа k никогда не наблюдалось, и она наблюдалась в одном и том же положении в течение времени T, то можно предположить, что средняя продолжительность времени в любом положении, D>T. Вероятность Pk того, что точка доступа k не переместилась в течение времени t, можно задать в виде: e-t/D=Pk>e-t/T.
Если точка доступа k перемещалась много раз, то интервалы времени, в течение которых точка доступа оставалась в разных положениях, можно использовать для получения различных статистических параметров, например средней продолжительности времени, дисперсии промежутков времени, распределения промежутков времени и т.д. Эту статистическую информацию можно использовать вместо статистической модели Пуассона для получения более надежной оценки вероятности того, что положение точки доступа k изменилось.
Точка доступа k может быть стационарной или может перемещаться нечасто, вследствие чего любая оценка математического ожидания и дисперсии продолжительности ее нахождения в одном положении может быть ненадежной. В этом случае оценку вероятности того, что точка доступа k переместилась после того, как ее положение было в последний раз проверено, можно получить на основании статистики, собранной для множества точек доступа. Это множество S может содержать все точки доступа в WLAN, заранее определенное количество точек доступа, точки доступа в одной области с точкой доступа k, точки доступа, принадлежащие конкретному оператору WLAN или связанные с ним, и т.д. Если какая-либо точка доступа в множестве S переместилась, то время перемещения можно определить и использовать для получения предполагаемого интервала времени D между последовательными перемещениями любой точки доступа в множестве S. Можно предположить, что перемещения каждой точки доступа в множестве S являются событиями Пуассона. При наличии N точек доступа в множестве S средняя продолжительность времени между перемещениями любой точки доступа можно задать в виде N*D, и вероятность Pk того, что точка доступа k не переместилась в момент времени t, можно задать в виде: Pk=e-t/(N*D). Более точные вероятности перемещения можно получить с использованием средней продолжительности времени N*D, определенной из истории перемещений для множества точек доступа, а не одной точки доступа.
Вероятность перемещения точки доступа также можно определить другими способами и/или с использованием других методов. Например, для прогнозирования перемещения можно использовать методы определения надежности системы или компонента, например времени до отказа электрического компонента.
Оценку положения терминала можно вывести на основании ранее полученных положений K точек доступа, где K>1. Далее можно задать:
Pk = надежность определения положения точки доступа k для 1≤k≤K
= вероятность того, что положение точки доступа k не изменилось после того как оно было в последний раз получено или в последний раз проверено, и
P = надежность оценки положения, полученной с использованием положений всех K точек доступа,
= вероятность того, что положения всех K точек доступа не изменилось после того, как они были в последний раз получены или в последний раз проверены.
Надежность оценки положения терминала можно задать в виде:
 , если изменения положений всех точек доступа являются независимыми,
, если изменения положений всех точек доступа являются независимыми,  , если изменения положений всех точек доступа являются взаимосвязанными,
, если изменения положений всех точек доступа являются взаимосвязанными,
Уравнение (12) указывает, что общая надежность оценки положения задается произведением отдельных надежностей, когда вероятность изменения положения любой точки доступа не зависит от того, изменились ли положения других точек доступа. Точки доступа, используемые для получения оценки положения, обычно располагаются близко друг к другу, что позволяет располагать терминал так, чтобы он мог принимать сигналы от этих точек доступа. Таким образом, перемещение одной точки доступа может положительно коррелировать с перемещением других точек доступа. Например, если оператор WLAN принимает решение перенастроить или расширить WLAN, то, вероятно, будет перемещено более одной точки доступа. Если данная точка доступа k перемещена, это может повысить вероятность того, что соседняя точка доступа также была перемещена. Если точка доступа k не переместилась, это может повысить вероятность того, что соседняя точка доступа не переместилась, что отражено в уравнении (13).
Точка доступа может сообщать положение, например, в кадрах сигнала маяка согласно IEEE 802.11. Надежность положения точки доступа может вызывать сомнения по разным причинам. Например, положение точки доступа может быть неверным вследствие погрешности в определении положения, ошибок ручного ввода, производимого оператором WLAN, перемещения точки доступа без обновления ее положения и т.д. В действительности, при столь большом количестве WLAN, существующих в настоящее время, и при том упоре, который делается на экономию времени и ресурсов, маловероятно, что точное и надежное положение всегда будет обеспечиваться.
Методы позиционирования, в которых используются положения точек доступа, могут проверять эти положения. После проверки положения точки доступа можно определить, верно ли положение, сообщенное точкой доступа. Это можно осуществлять для большого количества точек доступа. Для данного положения точки доступа, которое не было проверено, вероятность того, что положение неверно, можно определить, предполагая равную вероятность правильности для всех точек доступа. Например, если m из n положений точек доступа являются верными, где m≤n, то вероятность того, что положение другой точки доступа верно, можно задать в виде m/n. При задании правильности можно задать пределы допустимой погрешности (например, 50 или 200 метров), и можно получить отдельные вероятности правильности для разных пределов допустимой погрешности. Тогда уравнение (12) можно использовать для оценки надежности положения любого терминала, чье положение определяется с использованием положений точек доступа, которые могут быть ненадежными по любой из вышеупомянутых причин. В этом случае Pk в уравнении (12) может представлять вероятность правильности положения, сообщенного точкой доступа, или вероятность того, что ранее проверенное положение точки доступа не изменилось.
После того как положение точки доступа получено или проверено, например, согласно вышеприведенному описанию, его можно использовать для оценки положений других точек доступа. Терминал может обеспечивать идентификаторы всех точек доступа, принимаемых на терминале. Известное положение любой принимаемой точки доступа можно использовать в качестве приблизительного положения принимаемой точки доступа, чье положение в настоящий момент не известно. Затем его можно использовать для приближенного определения положения других терминалов, например, с использованием метода AP ID. Оценки положения этих терминалов могут быть грубыми, но достаточными для A-GPS и других приложений, для которых приемлема низкая точность результатов определения положения.
9. Поддержка определения положения с помощью OMA SUPL и 3GPP2 X.S0024
Описанные здесь методы позиционирования могут поддерживаться терминалами, точками доступа и/или другими сетевыми объектами, связанными с WLAN. Позиционирование терминала может осуществляться локально. Объект может запрашивать положение терминала у терминала или WLAN, например точки доступа.
Для поддержки позиционирования терминалов в WLAN может оказаться эффективнее расширять существующие возможности беспроводных решений определения положения в плоскости пользователя, например протокола надежного определения положения в плоскости пользователя (SUPL), разработанного Открытым мобильным альянсом (OMA), и протокола X.S0024, разработанного 3GPP2. Решения определения положения в плоскости пользователя можно использовать для поддержки позиционирования для терминалов, сохранения и обеспечения результатов определения положения, поддержки конфиденциальности для пользователя терминала, поддержки аутентификации объекта, запрашивающего положение терминала, и т.д. Решения определения положения в плоскости пользователя в настоящее время поддерживают ряд методов позиционирования, например ID соты с опережением в хронировании, E-OTD, OTDOA и A-FLT, которые применимы к WWAN (например, сетям GSM, W-CDMA и cdma2000), но не к WLAN. Решения определения положения в плоскости пользователя также поддерживают другие методы позиционирования, например GPS и A-GPS, которые применимы к различным беспроводным сетям, где специальная поддержка WLAN не требуется. Решения определения положения в плоскости на пользователя можно расширить для поддержки методов позиционирования для WLAN.
На фиг.6 показано размещение с SUPL и X.S0024. Терминал 120 может использовать WLAN 100 для доступа в Интернет 610, к сети мультимедийных подсистем IP (IMS) 620 в 3GPP или 3GPP2, или другим службам 3GPP или 3GPP2, описанным в 3GPP TS 23.234 и 3GPP2 X.P0028. Терминал 120 может осуществлять связь с WLAN 100, которую можно использовать в качестве общей сети доступа (GAN) для поддержки доступа к GSM и GPRS, как описано в 3GPP TS 43.318. Терминал 120 может использовать методы позиционирования WLAN в SUPL или X.S0024 при осуществлении связи с WLAN 100. В SUPL, терминал называется терминалом с поддержкой SUPL (SET).
SUPL использует платформу определения положения SUPL (SLP) 630, которая отвечает за служебное управление и позиционирование SUPL. Служебное управление SUPL может включать в себя управление положениями SET и сохранение, извлечение и изменение информации положения целевых SET. SLP 630 включает в себя центр определения положения SUPL (SLC) 632 и может включать в себя центр позиционирования SUPL (SPC) 634. SLC 632 осуществляет различные функции для услуг определения положения, координирует работу SUPL и взаимодействует с SET посредством однонаправленного канала в плоскости пользователя. SLC 632 может осуществлять функции для поддержки конфиденциальности, инициирования, безопасности, роуминга, выставления счетов/тарификации, служебного управления, вычисления позиции и т.д. SPC 634 поддерживает позиционирование SET, отвечает за сообщения и процедуры, используемые для вычисления позиции, и поддерживает доставку вспомогательных данных на SET. SPC 634 может осуществлять функции безопасности, доставки вспомогательных данных, восстановления начала отсчета, вычисления позиции и т.д. SPC 634 имеет доступ к приемникам GPS (опорной сети, возможно, глобальной) и принимает сигналы для спутников, благодаря чему он может обеспечивать вспомогательные данные.
X.S0024 использует объекты 640 определения положения, которые могут включать в себя позиционный сервер X.S0024 (PS) 642 и объект определения позиции X.S0024 (PDE) 644. PS 642 может осуществлять функции, аналогичные тем, которые осуществляет SLC 632. PDE 644 может осуществлять функции, аналогичные тем, которые осуществляет SPC 634.
Методы позиционирования WLAN могут поддерживаться в SUPL или X.S0024 благодаря наличию новых идентификаторов для этих методов позиционирования в SUPL и X.S0024 и/или благодаря обеспечению измерений, связанных с новым положением, подлежащих отправке с терминалов в объекты SUPL или X.S0024. Для позиционирования на основе терминалов терминал осуществляет измерения и вычисляет оценку положения. В этом случае SLP или SPC SUPL и PS или PDE X.S0024 может передавать информацию положения, чтобы помочь терминалу в проведении измерений и/или вычислении оценки положения. Информация положения может содержать, например, координаты точек доступа, значения RTD для метода OTD и т.д.
В таблице 2 приведены сигналы, которые могут быть включены в OMA SUPL для поддержки описанных здесь методов позиционирования WLAN. Для метода ID соты идентификатор соты может уже быть включен в сообщения SUPL START и SUPL POS INIT, но может быть дополнен новыми параметрами, указанными в таблице 2. Информация положения, представленная в таблице 2, также может быть включена в другие параметры и сообщения SUPL.
Полезная нагрузка позиционирования может содержать сообщение Протокола LCS радиоресурсов (RRLP) в 3GPP, сообщение управления радиоресурсами (RRC) в 3GPP, сообщение TIA-881 в 3GPP2 и т.д.
Благодаря признакам, приведенным в таблице 2, SLP или SPC SUPL может поддерживать вышеописанные методы позиционирования WLAN. SLP или SPC также может функционировать как сетевой сервер в отношении методов позиционирования WLAN и осуществлять вышеописанные операции. SET может функционировать как идентифицированный терминал. Другие или дополнительные сигналы и признаки также могут быть предусмотрены в SUPL для поддержки методов позиционирования WLAN.
Аналогичные сигналы и признаки также могут быть предусмотрены в X.S0024. PS или PDE X.S0024 может поддерживать вышеописанные методы позиционирования WLAN. PS может функционировать как сетевой сервер в отношении методов позиционирования WLAN и осуществлять вышеописанные операции. Мобильная станция (MS) может функционировать как идентифицированный терминал.
10. Поддержка определения положения посредством решения в плоскости управления
Позиционирование терминалов в WLAN также можно поддерживать за счет расширения существующих возможностей беспроводных решений определения положения в плоскости управления для сетей 3GPP и 3GPP2. Решение определения положения в плоскости управления для GSM, W-CDMA и других сетей 3GPP описано в 3GPP TS 23.271, 43.059 и 25.305. Решение определения положения в плоскости управления для cdma2000 и других сетей 3GPP2 описано в X.S0002, TIA-881, и J-STD-036 rev B. Эти документы общедоступны.
На фиг.7 показано размещение с решениями определения положения в плоскости управления согласно 3GPP и 3GPP2. Терминал 120 использует WLAN 100 для доступа к сети 3GPP 710, сети 3GPP2 720 или другим службам 3GPP или 3GPP2, что описано, например, в 3GPP 23.234 и 3GPP2 X.P0028. Сеть 3GPP 710 может представлять собой сеть GSM, сеть W-CDMA и т.д. и может включать в себя контроллеры базовых станций (BSC), контроллеры радиосети (RNC) и т.д. Сеть 3GPP2 720 может представлять собой сеть cdma2000 и т.д. и может включать в себя BSC и т.д. Терминал 120 может осуществлять связь с WLAN 100, которую можно использовать в качестве GAN для поддержки доступа к GSM и GPRS, как описано в 3GPP TS 43.318. Терминал 120 может использовать методы позиционирования WLAN при осуществлении связи с WLAN 100.
Решение определения положения в плоскости управления, согласно 3GPP, использует объекты определения положения, которые могут включать в себя шлюзовой центр определения положения мобильных устройств (GMLC) 732 и служебный центр определения положения мобильных устройств (SMLC)/автономный SMLC (SAS) 734. GMLC 732 может обеспечивать различные услуги, например конфиденциальность, авторизацию, аутентификацию, тарификацию абонентов и т.д. SMLC/SAS 734 может поддерживать позиционирование для терминалов. Решение определения положения в плоскости управления, согласно 3GPP2, использует объекты определения положения, которые могут включать в себя центр позиционирования мобильных устройств (MPC) 742 и PDE 744, которые могут функционировать аналогично GMLC 732 и SMLC/SAS 734, соответственно.
Для решения определения положения в плоскости управления, согласно 3GPP, новые сигналы и признаки можно добавить в протокол RRLP, используемый для определения положения в сетях GSM и описанный в 3GPP 44.031, и/или протокол RRC, используемый для определения положения в сетях W-CDMA и описанный в 3GPP 25.331. Новые сигналы и признаки могут быть идентичны или аналогичны сигналам и признакам, приведенным в таблице 2, но будут добавляться в сообщения RRLP и/или RRC, а не в сообщения SUPL. Новые сигналы и признаки можно расширить для поддержки позиционирования терминалов, осуществляющих доступ к 3GPP GAN, поддерживаемый WLAN. Для 3GPP SMLC, SAS, BSC, RNC или контроллер общей сети доступа (GANG) может функционировать как сетевой сервер и осуществлять операции, описанные выше в отношении методов позиционирования WLAN. Пользовательское оборудование (UE) или мобильная станция (MS) может функционировать как идентифицированный терминал. Новые сигналы и признаки для RRLP и RRC также можно использовать для поддержки SUPL, поскольку RRLP и RRC можно использовать как часть SUPL.
Для решения определения положения в плоскости управления, согласно 3GPP2, новые сигналы и признаки можно добавить в протокол, заданный в TIA-801 и 3GPP2 C.S0022. Новые сигналы и признаки могут быть идентичны или аналогичны сигналам и признакам, приведенным в таблице 2, но будут добавляться в протокол TIA-801/C.S0022. Для 3GPP2 PDE может функционировать как сетевой сервер и осуществлять операции, описанные выше в отношении методов позиционирования WLAN. Мобильная станция (MS) в 3GPP2 может функционировать как идентифицированный терминал. Новые сигналы и признаки для TIA-801/C.S0022 также можно использовать для поддержки SUPL, поскольку протокол TIA-801/C.S0022 можно использовать как часть SUPL.
Описанные здесь методы позиционирования WLAN также применимы к беспроводным сетям других типов. В этих случаях роль точки доступа в WLAN будет играть базовая станция, например базовая станция GSM, W-CDMA или cdma2000. Измерения, связанные с точкой доступа, также можно заменить соответствующими измерениями для одной или нескольких базовых станций. Описанные здесь методы позиционирования для определения положения терминала или точки доступа в WLAN можно использовать для определения положения базовой станции.
На фиг.8 показан процесс 800 для позиционирования точек доступа. Измерения получают для, по меньшей мере, одной точки доступа в WLAN (блок 812). Измерения можно осуществлять на основании последовательностей передачи (например, кадров сигнала маяка), периодически передаваемых каждой точкой доступа. Измерения могут проводиться множественными терминалами в разных положениях или одним терминалом в разных положениях. Положение каждой точки доступа определяют на основании измерений и в соответствии с методом позиционирования (блок 814).
Для метода RTT измерения RTT могут проводиться, по меньшей мере, одним терминалом для одной точки доступа. Затем положение точки доступа можно определить на основании измерений RTT и известных положений, по меньшей мере, одного терминала.
Для метода OTD измерения OTD могут проводиться, по меньшей мере, одним терминалом для пары точек доступа. Затем положение каждой точки доступа можно определить на основании измерений OTD и известных положений, по меньшей мере, одного терминала. Значения RTD можно определить для измерения OTD, например, на основании функции, которая учитывает дрейф хронирования в передачах, используемых для получения измерений OTD. Затем положение каждой точки доступа можно определить дополнительно на основании значений RTD.
Для метода TOA измерения TOA могут проводиться, по меньшей мере, одним терминалом для одной точки доступа. Затем положение точки доступа можно определить на основании измерений TOA и известных положений, по меньшей мере, одного терминала. Например, измерения OTD для, по меньшей мере, одной пары терминалов можно определить на основании измерений TOA, проводимых множественными терминалами. Затем положение точки доступа можно определить на основании измерений OTD и известных положений терминалов.
На фиг.9 показан процесс 900 для позиционирования точки доступа. Получают, по меньшей мере, одно положение, по меньшей мере, одного терминала, принимающего передачи от точки доступа в WLAN (блок 912). Положение точки доступа определяется на основании, по меньшей мере, одного положения, по меньшей мере, одного терминала (блок 914). Положение точки доступа можно определить дополнительно на основании ограничения по дальности для технологии радиосвязи (например, IEEE 802.11), используемой в WLAN, мощности передачи, используемой, по меньшей мере, одним терминалом или точкой доступа, и т.д. Положение точки доступа можно определить на основании (a) средних координат, по меньшей мере, одного положения, по меньшей мере, одного терминала, (b) центра тяжести географической области, покрывающей, по меньшей мере, один терминал, или (c) какой-либо другой точки, определенной на основании, по меньшей мере, одного положения терминала.
На фиг.10 показан процесс 1000 для позиционирования терминала. Получают измерения для или из, по меньшей мере, одной точки доступа в WLAN (блок 1012). Положение терминала определяется на основании измерений и, по меньшей мере, одного положения, по меньшей мере, одной точки доступа (блок 1014).
Для метода RTT измерения RTT могут проводиться терминалом для, по меньшей мере, одной точки доступа. Затем положение терминала можно определить на основании измерений RTT и известных положений, по меньшей мере, одной точки доступа. Для метода OTD измерения OTD могут проводиться терминалом для, по меньшей мере, двух пар точек доступа. Затем положение терминала можно определить на основании измерений OTD и известных положений точек доступа. Для метода TOA измерения TOA могут проводиться, по меньшей мере, тремя точками доступа для терминала. Затем положение терминала можно определить на основании измерений TOA и известных положений точек доступа.
Для метода AP ID измерения могут обеспечивать, по меньшей мере, один идентификатор, по меньшей мере, одной точки доступа, например, обслуживающей точки доступа. Положение каждой точки доступа можно получить на основании ее идентификатора. Затем положение терминала можно определить на основании, по меньшей мере, одного положения, по меньшей мере, одной точки доступа. Для метода уровня/качества сигнала измерения уровня сигнала, измерения качества сигнала или и те, и другие могут проводиться терминалом для, по меньшей мере, одной точки доступа. Затем положение терминала можно определить на основании измерений и идентификатора каждой точки доступа.
Для всех методов позиционирования положение терминала можно определить дополнительно на основании надежности положения каждой точки доступа, которую можно определить на основании информации истории положения только для этой точки доступа или для множества точек доступа.
На фиг.11 показан процесс 1100 для объединения результатов определения положения. Совокупность результатов определения положения получают для совокупности методов позиционирования (блок 1112). Методы позиционирования могут включать в себя любой из или комбинацию метода AP ID, метода RTT, метода OTD, метода TOA, метода уровня/качества сигнала, метода ID соты, GPS, A-GPS и т.д. Совокупность результатов определения положения объединяется для получения окончательного результата определения положения (блок 1114). Оценка положения для станции получается на основании окончательного результата определения положения (блок 1116). Результаты определения положения могут соответствовать функциям плотности вероятности для возможных положений станции. Функции плотности вероятности можно объединять для получения окончательной функции плотности вероятности. Результаты определения положения можно взвешивать на основании надежности методов позиционирования до объединения. Затем оценку положения для станции можно получить на основании окончательной функции плотности вероятности.
На фиг.12 показан процесс 1200 для осуществления позиционирования путем определения положения в плоскости пользователя или в плоскости управления. Терминал осуществляет связь с точкой доступа в WLAN (блок 1212). Терминал обменивается сигналами с сетевым объектом для позиционирования терминала (блок 1214). Обмен сигналами осуществляется через точку доступа. Сетевой объект поддерживает определение положения в плоскости пользователя (например, SUPL или X.S0024) или определение положения в плоскости управления (например, для 3GPP или 3GPP2). Терминал принимает информацию о положении от сетевого объекта (блок 1216). Информация о положении может содержать положения точек доступа, идентификаторы точек доступа, информацию хронирования точек доступа, вспомогательные данные и т.д., и ее можно использовать для проведения измерений, вычисления оценки положения и т.д. Терминал может определять свое положение на основании информации о положении (блок 1218).
Для позиционирования на основе терминалов терминал может получать измерения для, по меньшей мере, одной точки доступа в WLAN, например обслуживающей точки доступа и/или других точек доступа. Измерения могут представлять собой измерения RTT, измерения OTD, измерения TOA, измерения уровня сигнала, измерения качества сигнала и т.д. Затем терминал определяет свое положение на основании измерений и информации о положении (например, положений точек доступа), полученной от сетевого объекта.
Для позиционирования с помощью терминалов терминал может получать измерения для, по меньшей мере, одной точки доступа в WLAN на основании информации о положении, полученной от сетевого объекта. Терминал может направлять измерения в сетевой объект. Затем сеть может определить положение терминала на основании измерений и может передать оценку положения в терминал.
Оценки положения, полученные для терминала с использованием любых вышеописанных методов, также можно использовать для повышения точности и надежности других методов определения положения (например, GPS и A-GPS) в случаях или условиях, когда эти другие методы определения положения могут быть недостаточно точны и/или надежны.
На фиг.13 показана блок-схема одной точки доступа 110, одного терминала 120 и сетевого сервера 130, показанных на фиг.1. Для простоты, на фиг.13 показан только один контроллер/процессор 1320, один блок 1322 памяти и один приемопередатчик 1324 для терминала 120, только один контроллер/процессор 1330, один блок 1332 памяти, один приемопередатчик 1334 и один блок 1336 связи (Comm) для точки 110 доступа, и только один контроллер/процессор 1340, один блок 1342 памяти, и один блок 1344 связи для сетевого сервера 130. В общем случае, каждый объект может включать в себя любое количество процессоров, контроллеров, блоков памяти, приемопередатчиков, блоков связи и т.д. Терминал 120 может поддерживать беспроводную связь с одной или несколькими другими беспроводными сетями, например сетями GSM, W-CDMA и/или cdma2000. Терминал 120 также может принимать и обрабатывать сигналы от одной или нескольких спутниковых систем позиционирования, например GPS, Galileo и т.д.
На нисходящей линии связи точка 110 доступа передает данные трафика, сигнализацию и пилот на терминалы в своей зоне покрытия. Эти различные типы данных обрабатываются процессором 1330 и преобразуются приемопередатчиком 1334 для генерации сигнала нисходящей линии связи, который передается через антенну. В терминале 120 сигналы нисходящей линии связи от одной или нескольких точек доступа принимаются через антенну, преобразуются приемопередатчиком 1324 и обрабатываются процессором 1320 для получения различных типов информации. Например, приемопередатчик 1324 и/или процессор 1320 могут проводить различные измерения согласно любому из вышеописанных методов позиционирования WLAN. В блоках 1322 и 1332 памяти хранятся программные коды и данные для терминала 120 и точки 110 доступа, соответственно.
На восходящей линии связи терминал 120 может передавать данные трафика, сигнализацию и пилот-сигнал в одну или несколько точек доступа в WLAN 100. Эти различные типы данных обрабатываются процессором 1320 и преобразуются приемопередатчиком 1324 для генерации сигнала восходящей линии связи, который передается через антенну терминал. В точке 110 доступа сигналы восходящей линии связи от терминала 120 и других терминалов принимаются и преобразуются приемопередатчиком 1334 и дополнительно обрабатываются процессором 1330 для получения различных типов информации от терминала. Точка 110 доступа может прямо или косвенно осуществлять связь с сетевым сервером 130 через блок 1336 связи.
На сетевом сервере 130 процессор 1340 осуществляет обработку согласно любому из вышеописанных методов позиционирования WLAN. Например, процессор 1340 может строить и поддерживать базы данных для различных методов позиционирования WLAN, передавать информацию положения на терминалы, вычислять оценки положения для терминалов и/или точек доступа и т.д. В памяти 1342 хранятся программные коды и данные для сетевого сервера 130. Блок 1344 связи позволяет сетевому серверу 130 осуществлять связь с точкой 110 доступа и/или другими сетевыми объектами.
Описанные здесь методы можно реализовать различными средствами. Например, эти методы можно реализовать в оборудовании, программно-аппаратном обеспечении, программном обеспечении или их комбинации. Для аппаратной реализации блоки обработки, используемые для осуществления позиционирования на станции (например, в терминале, точке доступа или какой-либо другом объекте), можно реализовать в одной или нескольких специализированных интегральных схемах (СИС), цифровых сигнальных процессорах (ЦСП), устройствах обработки цифрового сигнала (DSPD), программируемых логических устройствах (ПЛУ), вентильных матрицах, программируемых пользователем (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных блоках, предназначенных для осуществления описанных здесь функций, компьютере или их комбинации.
Для программно-аппаратной и/или программной реализации методы можно реализовать посредством модулей (например, процедур, функций и т.д.), которые осуществляют описанные здесь функции. Программно-аппаратные и/или программные коды могут храниться в памяти (например, памяти 1322, 1332 или 1342, показанной на фиг.13) и выполняться процессором (например, процессором 1320, 1330 или 1340). Память можно реализовать в процессоре или вне процессора.
Заголовки включены сюда для ссылки и для удобства нахождения тех или иных разделов. Эти заголовки не призваны ограничивать объем концепций, описанных в соответствующих разделах, и эти концепции применимы к другим разделам данного описания изобретения.
Вышеприведенное описание раскрытия призвано обеспечить специалистам в данной области техники помощь в понимании и использовании раскрытия. Различные модификации раскрытия очевидны специалистам в данной области техники, и установленные здесь общие принципы применимы к другим вариациям, не отклоняющимся от сущности или объема раскрытия. Таким образом, раскрытие не предполагает ограничения описанными здесь примерами, но подлежит рассмотрению в широчайшем объеме, согласующемся с раскрытыми здесь принципами и новыми признаками.
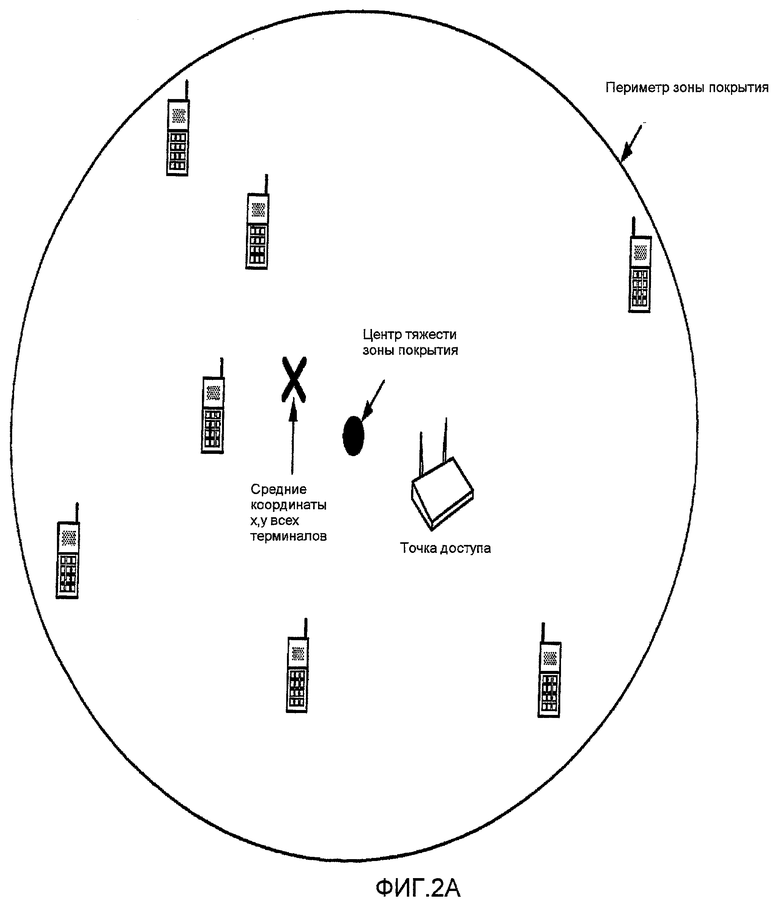
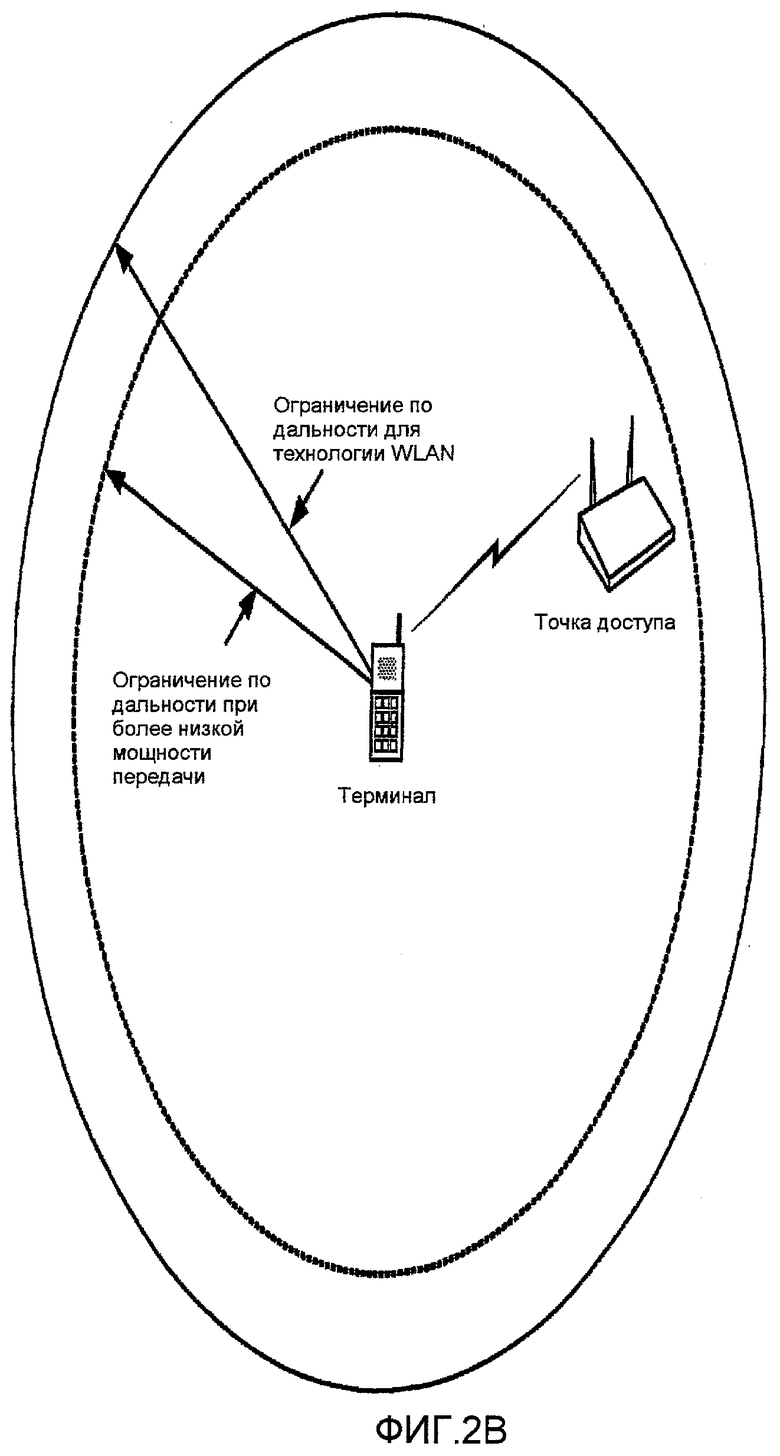
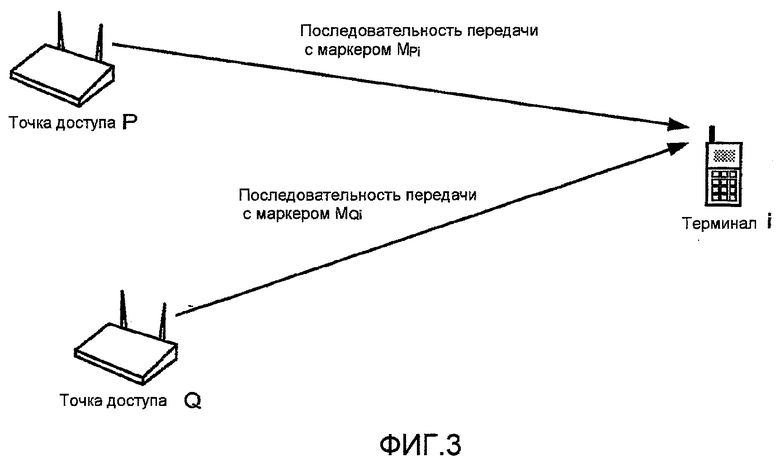
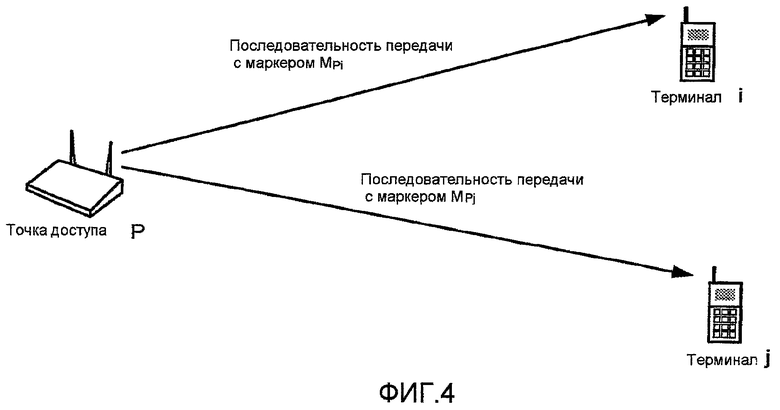
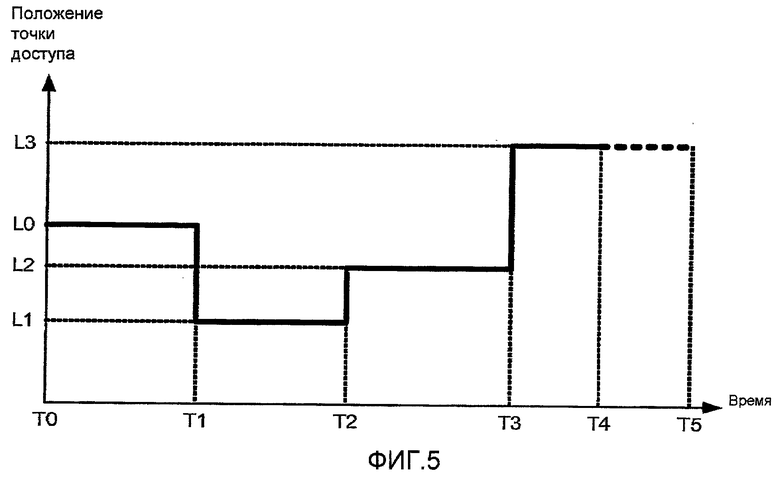
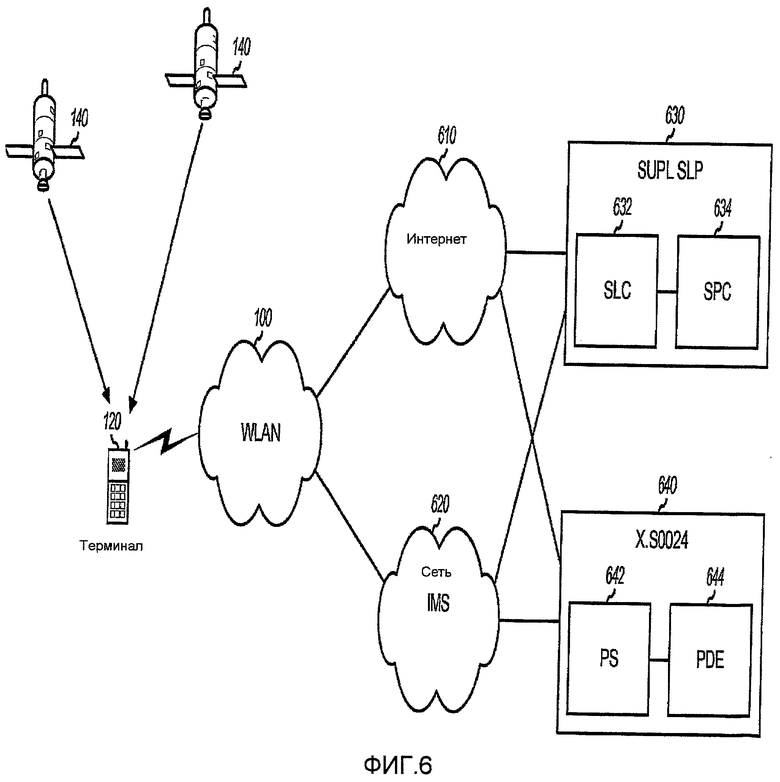
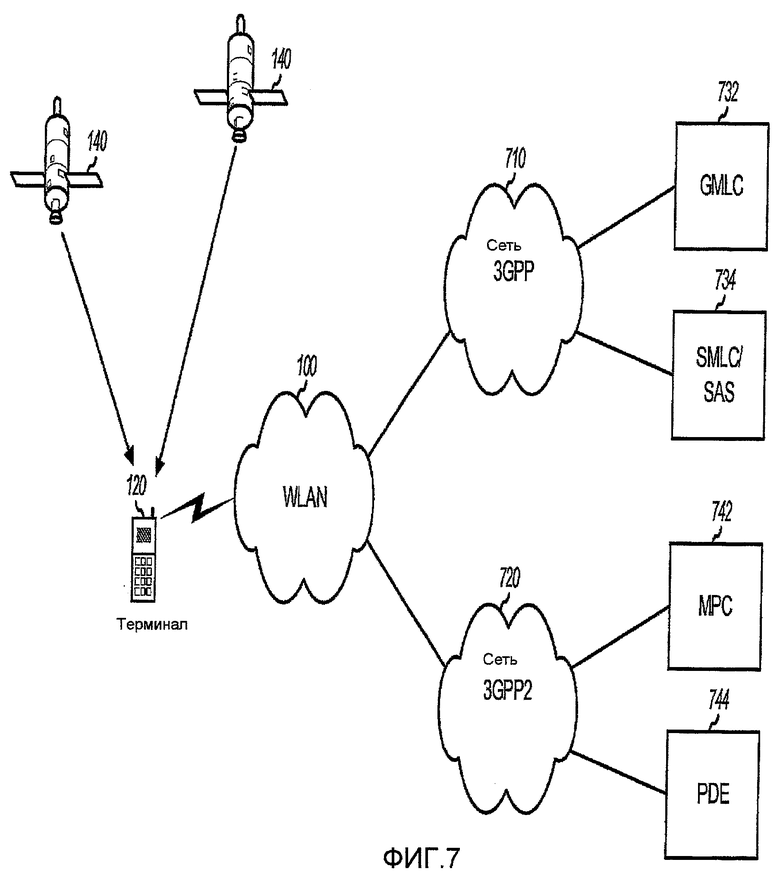
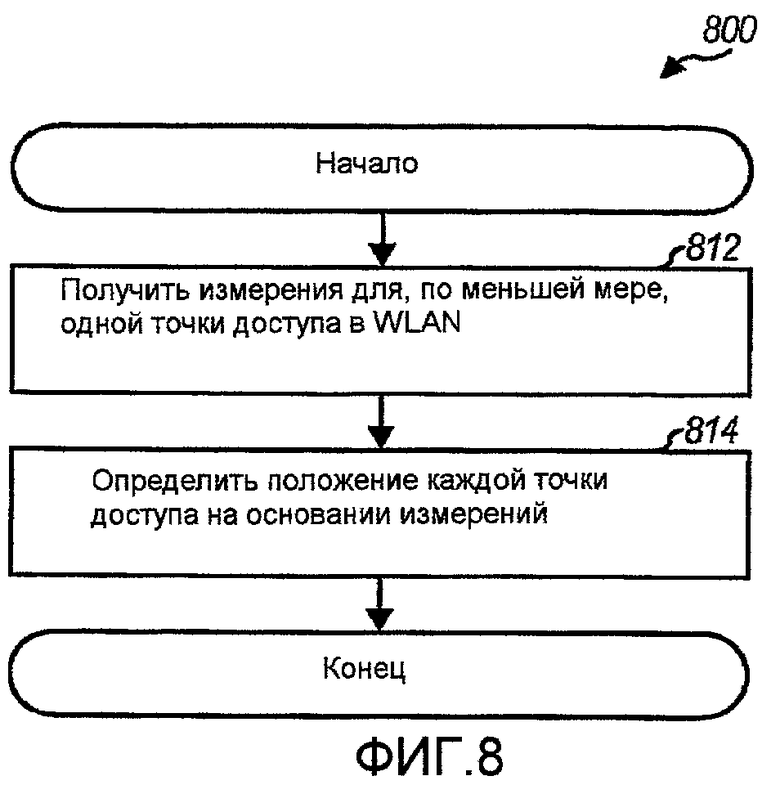
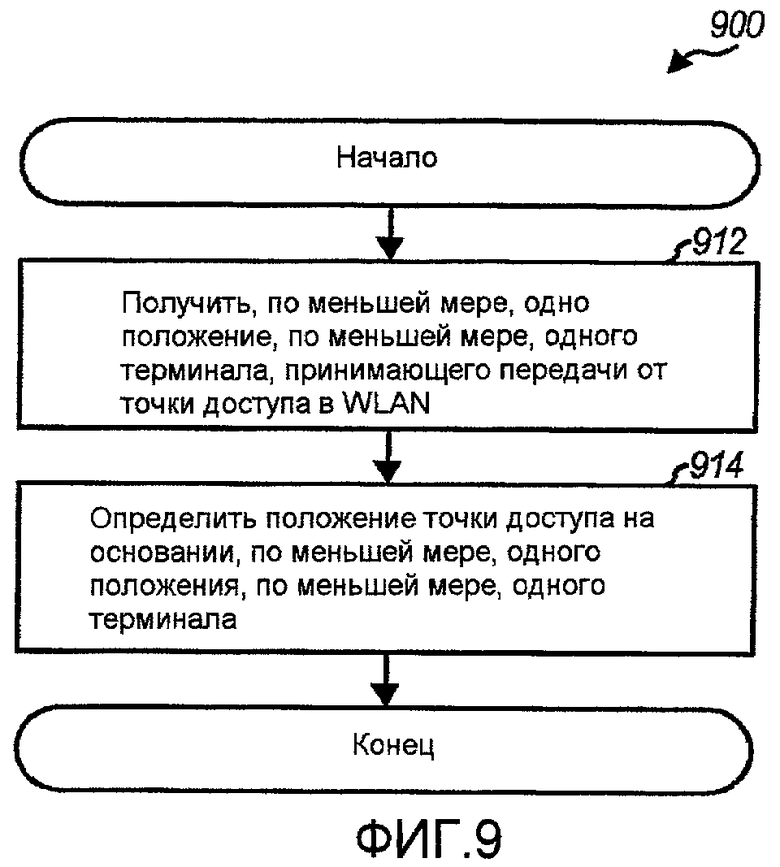
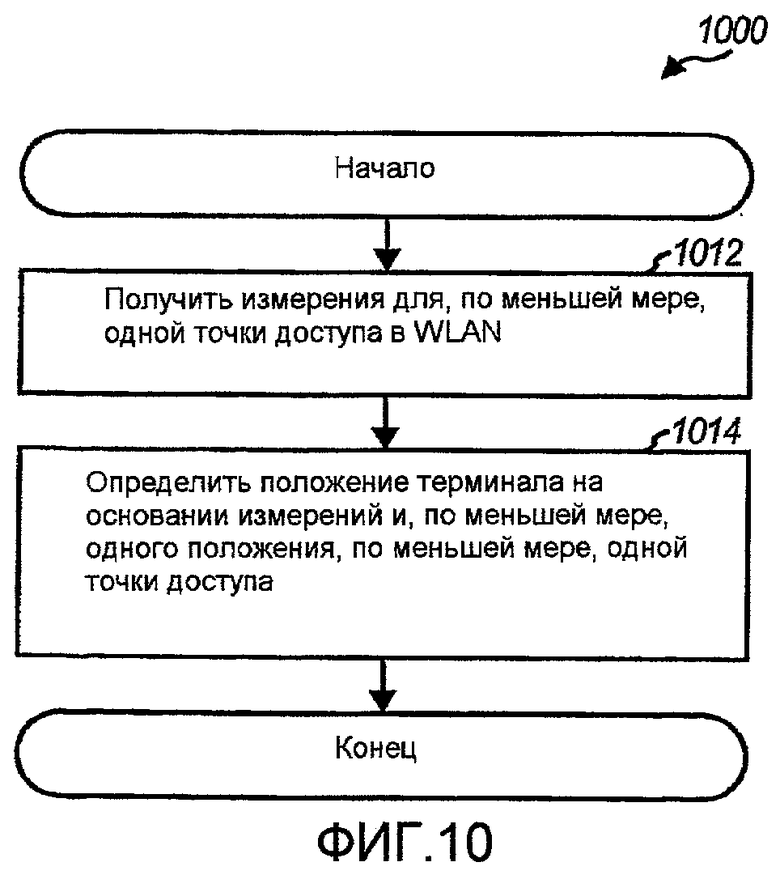
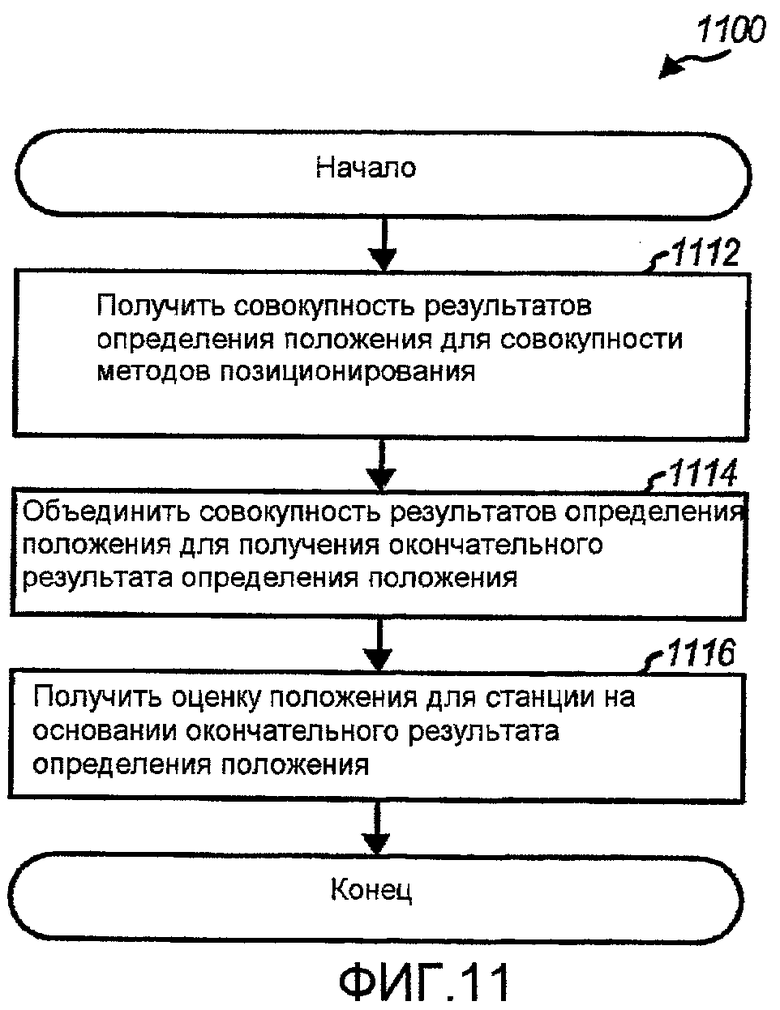
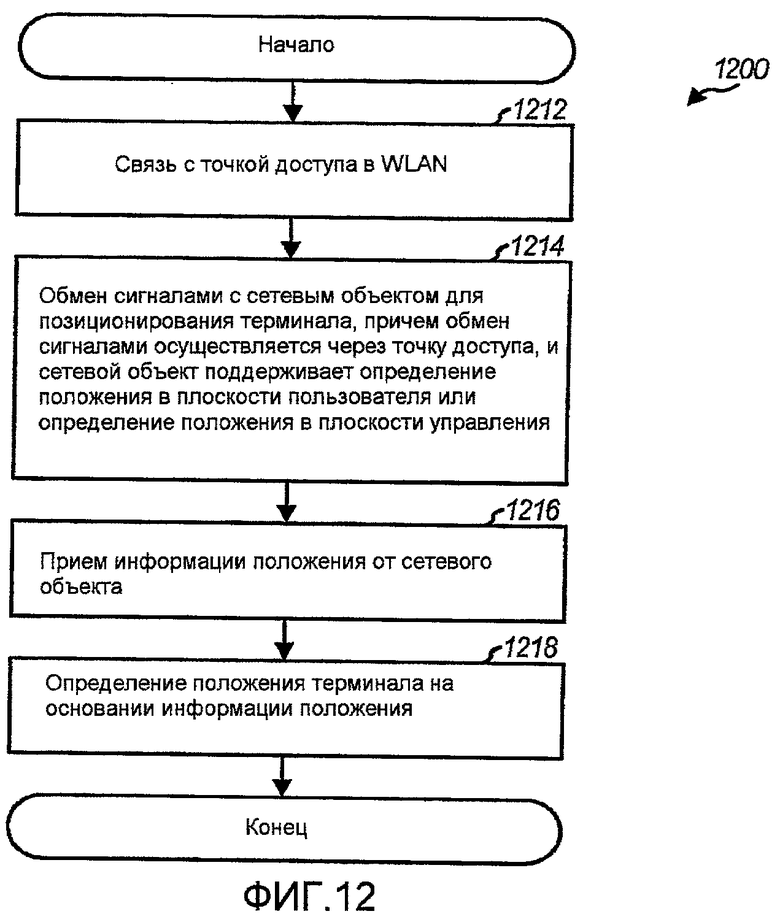
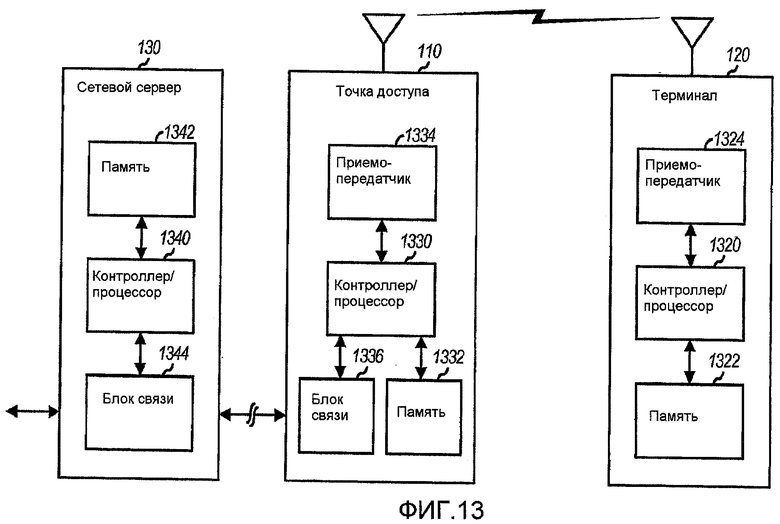
Изобретение относится к радиосвязи, в частности к методам осуществления позиционирования. Технический результат -повышение точности определения местонахождения терминала в беспроводной сети. Описаны методы для позиционирования точек доступа и терминалов в WLAN и других беспроводных сетях. Для позиционирования точки доступа измерения получаются для, по меньшей мере, одной точки доступа в WLAN. Измерения можно осуществлять на основании последовательностей передачи (например, кадров сигнала маяка), периодически передаваемых каждой точкой доступа. Измерения могут проводиться множественными терминалами в разных положениях или одним мобильным терминалом в разных положениях. Положение каждой точки доступа определяют на основании измерений и известных положений терминала(ов). Для позиционирования терминала получают измерения для, по меньшей мере, одной точки доступа в WLAN. Положение терминала определяют на основании измерений и известного положения каждой точки доступа. Измерения могут представлять собой измерения периода кругового обращения (RTT), измерения наблюдаемой разницы во времени (OTD), измерения времени прихода сигнала (ТОА), измерения уровня сигнала, измерения качества сигнала и т.д. 11 н. и 34 з.п. ф-лы, 13 ил., 2 табл.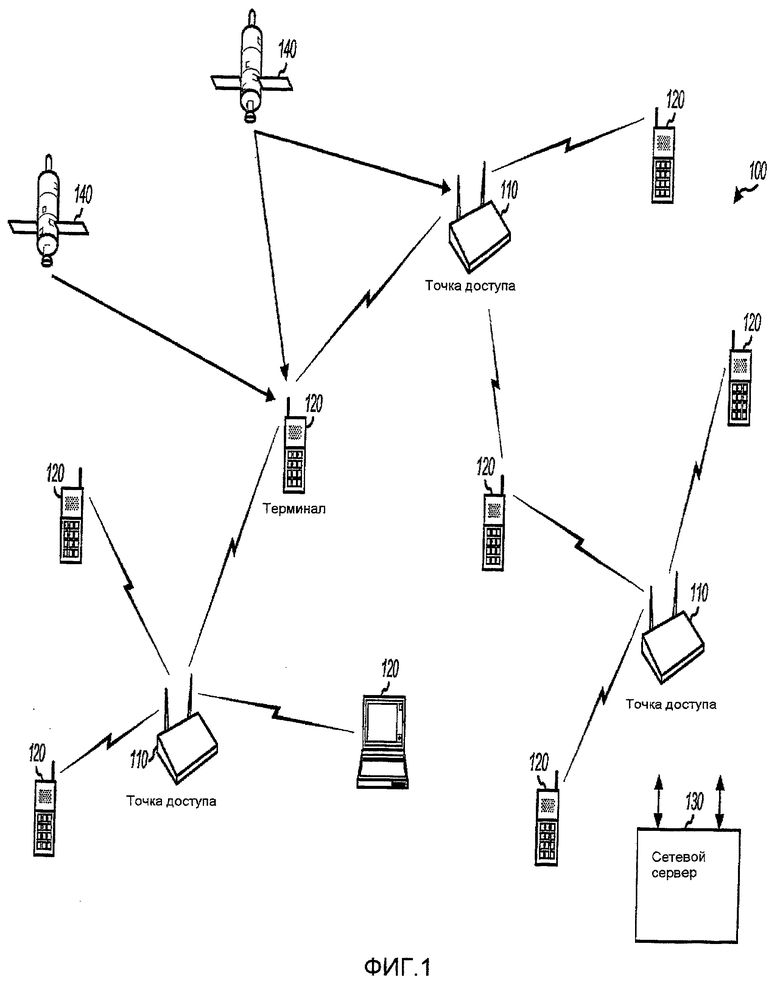
1. Устройство для определения положения точки доступа, содержащее процессор для получения измерений от, по меньшей мере, одного мобильного терминала, связанных с одним из наблюдаемой разницы во времени (OTD) или времени прихода сигнала (ТОА), для, по меньшей мере, одной точки доступа в беспроводной локальной сети (WLAN), получения положений, по меньшей мере, одного мобильного терминала и для определения положения каждой из, по меньшей мере, одной точки доступа на основании измерений и упомянутых положений, и память, подключенную к процессору.
2. Устройство по п.1, в котором измерения основаны на последовательностях передачи, периодически передаваемых, по меньшей мере, одной точкой доступа.
3. Устройство по п.1, в котором, по меньшей мере, одна точка доступа соответствует паре точек доступа, в котором измерения содержат измерения наблюдаемой разницы во времени (OTD), проводимые, по меньшей мере, одним терминалом для пары точек доступа, и в котором процессор определяет положение каждой точки доступа на основании измерений OTD и известных положений, по меньшей мере, одного терминала.
4. Устройство по п.3, в котором измерения OTD проводятся множественными терминалами в разных положениях, и в котором процессор определяет положение каждой точки доступа на основании измерений OTD и известных положений множественных терминалов.
5. Устройство по п.3, в котором процессор определяет значения реальной разницы во времени (RTD) для измерений OTD и определяет положение каждой точки доступа дополнительно на основании значений RTD.
6. Устройство по п.5, в котором процессор определяет значения RTD на основании функции, которая учитывает дрейф хронирования в передачах, используемых для получения измерений OTD.
7. Устройство по п.1, в котором, по меньшей мере, одна точка доступа соответствует одной точке доступа, в котором измерения содержат измерения времени прихода сигнала (ТОА), проводимые, по меньшей мере, одним терминалом для точки доступа, и в котором процессор определяет положение точки доступа на основании измерений ТОА и известных положений, по меньшей мере, одного терминала.
8. Устройство по п.7, в котором измерения ТОА проводятся множественными терминалами в разных положениях, и в котором процессор определяет положение точки доступа на основании измерений ТОА и известных положений множественных терминалов.
9. Устройство по п.7, в котором, по меньшей мере, одна точка доступа соответствует одной точке доступа, в котором измерения содержат измерения времени прихода сигнала (ТОА), проводимые множественными терминалами для точки доступа, и в котором процессор получает измерения наблюдаемой разницы во времени (OTD) для, по меньшей мере, одной пары терминалов на основании измерений ТОА, проводимых множественными терминалами, и определяет положение точки доступа на основании измерений OTD и известных положений множественных терминалов.
10. Способ определения положения точки доступа в системе связи, содержащий этапы, на которых
получают измерения, связанные с одним из наблюдаемой разницы во времени (OTD) или времени прихода сигнала (ТОА), для, по меньшей мере, одной точки доступа в беспроводной локальной сети (WLAN), получают положения, по меньшей мере, одного мобильного терминала во время измерений, и
определяют положение каждой из, по меньшей мере, одной точки доступа на основании измерений и упомянутых положений.
11. Способ по п.10, в котором на этапе получения измерений получают измерения наблюдаемой разницы во времени (OTD), проводимые, по меньшей мере, одним терминалом для пары точек доступа, и в котором на этапе определения положения определяют положение каждой точки доступа в паре на основании измерений OTD и известных положений, по меньшей мере, одного терминала.
12. Способ по п.10, в котором на этапе получения измерений получают измерения времени прихода сигнала (ТОА), проводимые, по меньшей мере, одним терминалом для одной точки доступа, и в котором на этапе определения положения определяют положение одной точки доступа на основании измерений ТОА и известных положений, по меньшей мере, одного терминала.
13. Устройство для определения положения точки доступа, содержащее
средство для получения измерений от, по меньшей мере, одного мобильного терминала, связанных с одним из наблюдаемой разницы во времени (OTD) или времени прихода сигнала (ТОА), для, по меньшей мере, одной точки доступа в беспроводной локальной сети (WLAN),
средство для получения положений, по меньшей мере, одного мобильного терминала во время измерений и
средство для определения положения каждой из, по меньшей мере, одной точки доступа на основании измерений и упомянутых положений.
14. Устройство по п.13, в котором средство для получения измерений содержит средство для получения измерений наблюдаемой разницы во времени (OTD), проводимых, по меньшей мере, одним терминалом для пары точек доступа, и в котором средство для определения положения содержит средство для определения положения каждой точки доступа в паре на основании измерений OTD и известных положений, по меньшей мере, одного терминала.
15. Устройство для определения положения точки доступа, содержащее
процессор для получения, по меньшей мере, одного положения, по меньшей мере, одного мобильного терминала, принимающего передачи от точки доступа в беспроводной локальной сети (WLAN), и получения дополнительной информации, связанной с одним из ограничения по дальности, мощности передачи или зоны покрытия точки доступа, и для определения положения точки доступа на основании, по меньшей мере, одного положения, по меньшей мере, одного мобильного терминала и дополнительной информации, и
память, подключенную к процессору.
16. Устройство по п.15, в котором процессор определяет дополнительную информацию на основании ограничения по дальности для технологии радиосвязи, используемой в WLAN.
17. Устройство по п.15, в котором процессор определяет дополнительную информацию на основании мощности передачи, используемой, по меньшей мере, одним мобильным терминалом или точкой доступа.
18. Устройство по п.15, в котором процессор определяет дополнительную информацию на основании центра тяжести географической области, покрывающей, по меньшей мере, один терминал.
19. Устройство для определения положения терминала, содержащее
процессор для получения измерений, связанных с одним из наблюдаемой разницы во времени (OTD), уровня сигнала и качества сигнала или времени прихода сигнала (ТОА), для, по меньшей мере, одной точки доступа в беспроводной локальной сети (WLAN) на основании, по меньшей мере, одного кадра сигнала маяка, передаваемого каждой из, по меньшей мере, одной точки доступа, и для определения положения терминала на основании измерений для, по меньшей мере, одной точки доступа и, по меньшей мере, одного положения, по меньшей мере, одной точки доступа, и
память, подключенную к процессору.
20. Устройство по п.19, в котором, по меньшей мере, одна точка доступа соответствует, по меньшей мере, двум парам точек доступа, в котором измерения содержат измерения наблюдаемой разницы во времени (OTD), проводимые терминалом для, по меньшей мере, двух пар точек доступа, и в котором процессор определяет положение терминала на основании измерений OTD и положений, по меньшей мере, двух пар точек доступа.
21. Устройство по п.19, в котором измерения содержат измерения времени прихода сигнала (ТОА), проводимые, по меньшей мере, одной точкой доступа для терминала, и в котором процессор определяет положение терминала на основании измерений ТОА и положения, по меньшей мере, одной точки доступа.
22. Устройство по п.19, в котором измерения обеспечивают, по меньшей мере, один идентификатор, по меньшей мере, одной точки доступа, и в котором процессор получает, по меньшей мере, одно положение, по меньшей мере, одной точки доступа на основании, по меньшей мере, одного идентификатора и определяет положение терминала на основании, по меньшей мере, одного положения, по меньшей мере, одной точки доступа.
23. Устройство по п.19, в котором измерения содержат измерения уровня сигнала, измерения качества сигнала или измерения уровня сигнала и качества сигнала, проводимые терминалом для, по меньшей мере, одной точки доступа, и в котором процессор определяет положение терминала на основании измерений и, по меньшей мере, одного идентификатора, по меньшей мере, одной точки доступа.
24. Устройство для определения положения терминала, содержащее
процессор для получения измерений для, по меньшей мере, одной точки доступа в беспроводной локальной сети (WLAN) и определения положения терминала на основании измерений для, по меньшей мере, одной точки доступа и, по меньшей мере, одного положения, по меньшей мере, одной точки доступа и надежности, по меньшей мере, одного положения, по меньшей мере, одной точки доступа;
и память, подключенную к процессору.
25. Устройство по п.24, в котором процессор определяет надежность положения каждой точки доступа на основании информации истории положения для точки доступа.
26. Устройство по п.24, в котором процессор определяет надежность положения каждой точки доступа на основании информация истории положения для множества точек доступа.
27. Способ определения положения терминала в системе связи, содержащий этапы, на которых
получают измерения, связанные с уровнем сигнала и качеством сигнала, для, по меньшей мере, одной точки доступа в беспроводной локальной сети (WLAN), и
определяют положение терминала на основании измерений для, по меньшей мере, одной точки доступа и, по меньшей мере, одного положения, по меньшей мере, одной точки доступа.
28. Способ по п.27, в котором на этапе получения измерений получают измерения уровня сигнала и качества сигнала, проводимые терминалом для, по меньшей мере, одной точки доступа, и в котором на этапе определения положения определяют положение терминала на основании измерений и, по меньшей мере, одного идентификатора, по меньшей мере, одной точки доступа.
29. Устройство для определения положения терминала, содержащее
средство для получения измерений, связанных с уровнем сигнала и качеством сигнала, для, по меньшей мере, одной точки доступа в беспроводной локальной сети (WLAN), и
средство для определения положения терминала на основании измерений для, по меньшей мере, одной точки доступа и, по меньшей мере, одного положения, по меньшей мере, одной точки доступа.
30. Устройство по п.29, в котором средство для получения измерений содержит средство для получения измерений уровня сигнала и качества сигнала, проводимых терминалом для, по меньшей мере, одной точки доступа, и в котором средство для определения положения содержит средство для определения положения терминала на основании упомянутых измерений и, по меньшей мере, одного идентификатора, по меньшей мере, одной точки доступа.
31. Устройство для определения оценки положения для станции, содержащее
процессор для получения совокупности результатов определения положения для совокупности методов позиционирования, для объединения совокупности результатов определения положения с помощью взвешивания каждого из совокупности результатов определения положения, на основании того, какой из совокупности методов позиционирования был использован для получения результата, для получения окончательного результата определения положения и для получения оценки положения для станции на
основании окончательного результата определения положения, и
память, подключенную к процессору.
32. Устройство по п.31, в котором совокупность результатов определения положения соответствует совокупности функций плотности вероятности для возможного положения станции, и в котором процессор объединяет совокупность функций плотности вероятности для получения окончательной функции плотности вероятности и получает оценку положения для станции на основании окончательной функции плотности вероятности.
33. Устройство по п.32, в котором процессор взвешивает совокупность результатов определения положения на основании надежности совокупности методов позиционирования.
34. Устройство по п.32, в котором совокупность методов позиционирования содержит, по меньшей мере, один метод позиционирования, выбранный из группы, содержащей метод идентификации точки доступа (АР ID), метод периода кругового обращения (RTT), метод наблюдаемой разницы во времени (OTD), метод времени прихода сигнала (ТОА), метод уровня сигнала или качества сигнала, метод глобальной системы позиционирования (GPS) и метод вспомогательной GPS (A-GPS).
35. Способ определения положения беспроводной станции в системе связи, содержащий этапы, на которых
получают совокупность результатов определения положения для совокупности методов позиционирования,
взвешивают каждый из совокупности результатов определения положения на основании того, какой из совокупности методов позиционирования был использован для получения результата,
объединяют совокупность взвешенных результатов определения положения для получения окончательного результата определения положения и
получают оценку положения для станции на основании окончательного результата определения положения.
36. Способ по п.35, в котором на этапе объединения совокупности результатов определения положения объединяют совокупность функций плотности вероятности для совокупности результатов определения положения для получения окончательной функции плотности вероятности для окончательного результата определения положения, и в котором на этапе получения оценки положения получают оценку положения для станции на основании окончательной функции плотности вероятности.
37. Устройство для определения положения станции, содержащее процессор для осуществления связи с точкой доступа в беспроводной локальной сети (WLAN), для обмена сигналами с сетевым объектом позиционирования для позиционирования станции, для приема информации о положении от сетевого объекта позиционирования, причем информация положения включает в себя, по меньшей мере, одно из следующего: положения точек доступа в WLAN или реальные разницы во времени (RTD) между хронированием пар точек доступа, и для определения положения станции на основании информации о положении, причем обмен сигналами осуществляется через точку доступа, и при этом упомянутый сетевой объект поддерживает определение положения в плоскости пользователя или определение положения в плоскости управления, и
память, подключенную к процессору.
38. Устройство по п.37, причем станция представляет собой терминал, осуществляющий связь с точкой доступа и обменивающийся сигналами с сетевым объектом.
39. Устройство по п.37, причем станция представляет собой точку доступа.
40. Устройство по п.37, в котором информация о положении содержит, по меньшей мере, одно из следующего: положения точек доступа, идентификаторы точек доступа и информацию хронирования точек доступа.
41. Устройство по п.37, в котором процессор получает измерения для, по меньшей мере, одной точки доступа в WLAN и определяет положение станции на основании измерений и информации о положении, полученной от сетевого объекта.
42. Устройство по п.41, в котором измерения содержат, по меньшей мере, одно из измерений: измерения периода кругового обращения (RTT), измерения наблюдаемой разницы во времени (OTD), измерения времени прихода сигнала (ТОА), измерения уровня сигнала и измерения качества сигнала.
43. Устройство по п.37, в котором процессор получает измерения для, по меньшей мере, одной точки доступа в WLAN на основании информации о положении, полученной от сетевого объекта, передает измерения в сетевой объект и получает оценку положения для станции от сетевого объекта.
44. Устройство по п.37, в котором сетевой объект поддерживает надежное определение положения в плоскости пользователя (SUPL) или X.S0024.
45. Устройство по п.37, в котором сетевой объект поддерживает определение положения в плоскости управления, используемое для сетей 3GPP или сетей 3GPP2.
| US 6466938 B1, 15.10.2002 | |||
| БЕСКАБЕЛЬНАЯ ЛОКАЛЬНАЯ СЕТЬ | 1994 |
|
RU2107396C1 |
| US 6236365 B1, 22.05.2001 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| EP 1289320 A1, 05.03.2003 | |||
| US 6275707 B1, 14.08.2001. | |||

