Изобретение относится к области авиационной техники, а именно к системам навигации, самолетовождения, управления воздушным движением (УВД) и наблюдения за подвижными объектами в воздушном пространстве.
В условиях непрерывно возрастающей интенсивности полетов, увеличения скорости полетов и пассажировместимости воздушных судов (ВС), а также в связи с переходом на сокращенные нормы вертикального эшелонирования (RVSM - Reduced Vertical Separation Minima) предъявляются более высокие требования к измерения высоты полета, а также к точности выдерживания заданной высоты эшелона.
Основным измерителем высоты полета является барометрический высотомер (БВ). Для оценки ошибок измерения барометрической высоты используют источники информации более точные, чем приборы манометрической группы, например радиовысотомеры и спутниковые навигационные системы (СНС).
Известен способ повышения точности барометрического высотомера с использованием спутниковой системы местоопределения по патенту РФ №2316785 (13) С1, МПК7 G01S 7/40, опубл. 2008.02.10 (www.fips.ru). Сущность указанного метода заключается в том, что с помощью приемника глобальной системы местоопределения вычисляют плановые координаты летательного аппарата (ЛА), определяют по ним высоту hp рельефа местности, над которой находится ЛА, суммируют hp с данными радиовысотомера Нрв, определяют погрешность баровысотомера ΔНбв=Нбв-(Hpв+hp), корректируют Нбв на величину ΔНбв и полученный результат выдают потребителю информации о баровысоте.
Недостаток указанного способа состоит в том, что его можно применять на относительно низких высотах полета, так как на больших высотах радиовысотомер работает неустойчиво, а также возникает существенная погрешность при учете высоты рельефа. Другим недостатком данного способа является то, что СНС используют только для определения местоположения ЛА, а именно его географических координат на поверхности земли, а данные измерений высоты от СНС не используют.
Наиболее близким по своей технической сущности к заявленному является способ и устройство для калибровки и повышения точности барометрических высотомеров с использованием спутниковой системы местоопределения по патенту США №6768449 (В1), МПК7 G01C 5/06; G01C 21/20, опубл. 27.07.2004 (www.v3.espacenet.com).
Способ-прототип заключается в том, что определяют разницу измерений высоты, полученных от барометрического высотомера и от GPS-приемника. По полученным данным вычисляют среднюю разницу высот, а также среднестатистическую ошибку указанной разницы. Если отклонения среднестатистической ошибки превосходят заранее определенную величину допустимых отклонений, то процессор начинает вычислять необходимую величину калибровки БВ.
Указанную величину калибровки получают из текущей относительной барометрической высоты, рассчитанной по гипсометрической формуле с использованием локальных параметров атмосферы, путем вычитания усредненного отклонения барометрической высоты, полученного в результате расчетов с использованием статистических данных измерений указанного БВ.
Существенным недостатком прототипа является невозможность его использования при полете на высотных эшелонах. Это объясняется тем, что при полете на эшелонах следует измерять и выдерживать постоянной высоту, отсчитываемую не от уровня моря, а от изобарической поверхности, соответствующей стандартному атмосферному давлению.
Заявленное техническое решение расширяет арсенал средств данного предназначения.
Целью изобретения является устранение недостатков и расширение возможностей системы-прототипа, повышение информативности и обеспечение достоверности индицируемых данных при полете ВС на трассах и маршрутах, где требуется выдерживать высоту эшелона. Цель состоит также в вычислении на борту собственного ВС локальной погрешности БВ и поправки к его показаниям, а также отображения на внутрикабинном индикаторе указанной поправки и относительных высот полета других ВС, выполняющих полет на смежных эшелонах, а на наземном пункте наблюдения и в центре УВД в вычислении и отображении на индикаторе воздушной обстановки для каждого участника воздушного движения ошибок выдерживания высоты эшелона, а также в документировании указанных данных на цифровом магнитофоне или ином устройстве хранения информации.
Указанная цель достигается тем, что во время полета на заданном эшелоне воздушных судов, оборудованных бортовыми измерителями координат местоположения и параметров движения, а также высокоточными синхронизированными часами и приемопередающими радиостанциями, которые ведут передачу в один или несколько общих каналов, каждая радиостанция прослушивает общий радиоканал, принимает сообщения от радиостанций, находящихся от нее на расстоянии радиовидимости, и ведет передачу в общий радиоканал. Передаваемое сообщение содержит идентификатор источника сообщения, данные о координатах местоположения радиостанции, в том числе геометрическую (геодезическую) высоту, параметры движения, высоту заданного эшелона и измеренную относительную барометрическую высоту, температуру окружающей среды, а также отсчет момента измерений по шкале единого времени.
Для мониторинга выдерживания высот ВС при полете на фиксированном эшелоне задают ограниченную область пространства. От воздушных судов, находящихся в указанной области пространства получают сообщения, отсеивают недостоверные данные, а достоверные запоминают для дальнейшей обработки.
Задают вид описывающей функции, аппроксимирующей зависимость между барометрической и геометрической высотами, вычисляют коэффициенты описывающей функции, решают описывающую функцию и по данным бортовых измерителей вычисляют для каждого ВС отклонение от заданной высоты эшелона.
Новым также является то, что на наземных пунктах наблюдения, а также в центрах УВД в зоне наблюдения и управления выделяют и фиксируют эшелон, который подлежит анализу, а также выделяют область пространства вокруг него, содержащую один или несколько смежных эшелонов.
Для линейной описывающей функции с использованием данных о температуре окружающей среды, которые получены от ВС, находящихся в указанной области пространства, вычисляют коэффициент масштаба.
Для каждого ВС вычисляют значения коэффициента сдвига описывающей функции, причем измерения геометрических высот, полученные от ВС на смежных эшелонах пересчитывают к фиксированному эшелону, подлежащему анализу.
Упорядочивают вычисленные для каждого из измерений величины коэффициента сдвига описывающей функции и выделяют те из них, которые принадлежат интервалу допустимых отклонений, причем результирующий коэффициент сдвига для данного эшелона вычисляют как среднее из указанных коэффициентов.
Вычисляют для каждого из ВС на фиксированном анализируемом эшелоне отклонения от заданной барометрической высоты. При выявлении отклонений, превышающих допустимые, формируют сообщения, которые отображают на индикаторе воздушной обстановки и передают на борт соответствующего ВС, причем для каждого ВС документируют измеренные и вычисленные высоты на цифровом магнитофоне или ином устройстве хранения информации.
Для вычисления на борту собственного ВС локальной погрешности БВ и поправки к его показаниям вокруг него выделяют ограниченную область пространства, в которой для ВС, выполняющих полет на эшелоне указанного собственного ВС, а также на одном или нескольких смежных вычисляют коэффициент масштаба описывающей функции.
Для каждого ВС вычисляют коэффициенты сдвига описывающей функции на интервале допустимых отклонений, причем данные измерений геометрической высоты, полученные от ВС на смежных эшелонах пересчитывают к собственному эшелону.
С помощью цифрового фильтра сглаживают, интерполируют и экстраполируют данные о собственной геометрической высоте.
Вычисляют ошибку собственного измерителя барометрической высоты как разность между измеренной барометрической высотой и значением описывающей функции, в которую подставляют собственную геометрическую высоту с выхода цифрового фильтра, а также вычисляют показатель достоверности указанной оценки.
На внутрикабинном индикаторе отображают величину локальной поправки к показаниям собственного барометрического высотомера, а также для каждого из ВС в указанной области пространства вычисляют разность между высотой указанного воздушного судна и собственной барометрической высотой, представляют экипажу информацию о превышении указанных отклонений от допустимых значений, а также значение показателя достоверности.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Сравнение предлагаемого способа с прототипом показывает наличие дополнительных действий, а именно:
- координаты местоположения наблюдаемых оборудованных ВС, а также данные измерений барометрической и геометрической высот и температуры окружающей среды получают по каналам автоматического зависимого наблюдения, селектируют данные и сглаживают на цифровых фильтрах;
- вычисляют абсолютную температуру на эшелоне и оценку величины фактической температуры окружающей среды;
- вычисляют параметры описывающей функции;
- решают описывающую функцию и вычисляют для каждого ВС величину ошибки измерения барометрической высоты, а также оценивают достоверность вычисленной ошибки.
Способ может найти применение на борту ЛА, а также в центрах УВД для мониторинга полета по маршрутам и воздушным трассам и расследовании летных происшествий и предпосылок к ним.
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 - обмен информации между ВС и наземными пунктами наблюдения при мониторинге выдерживания заданного высотного эшелона;
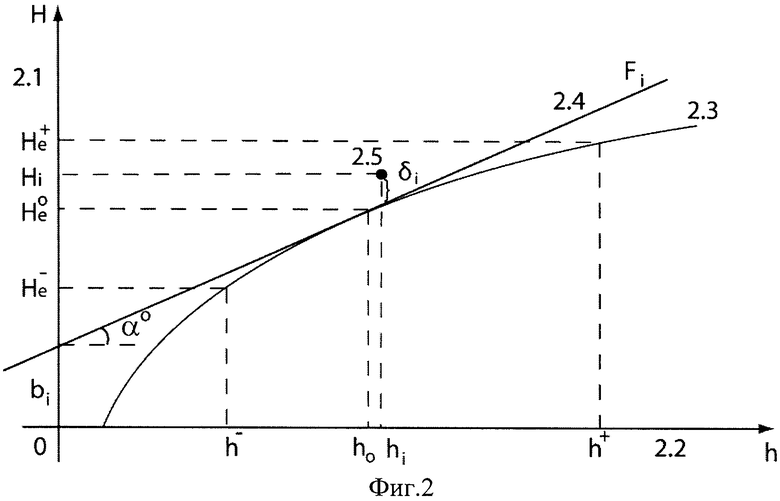
фиг.2 - график описывающей функции, которая аппроксимирует зависимость между барометрической и геометрической высотами;
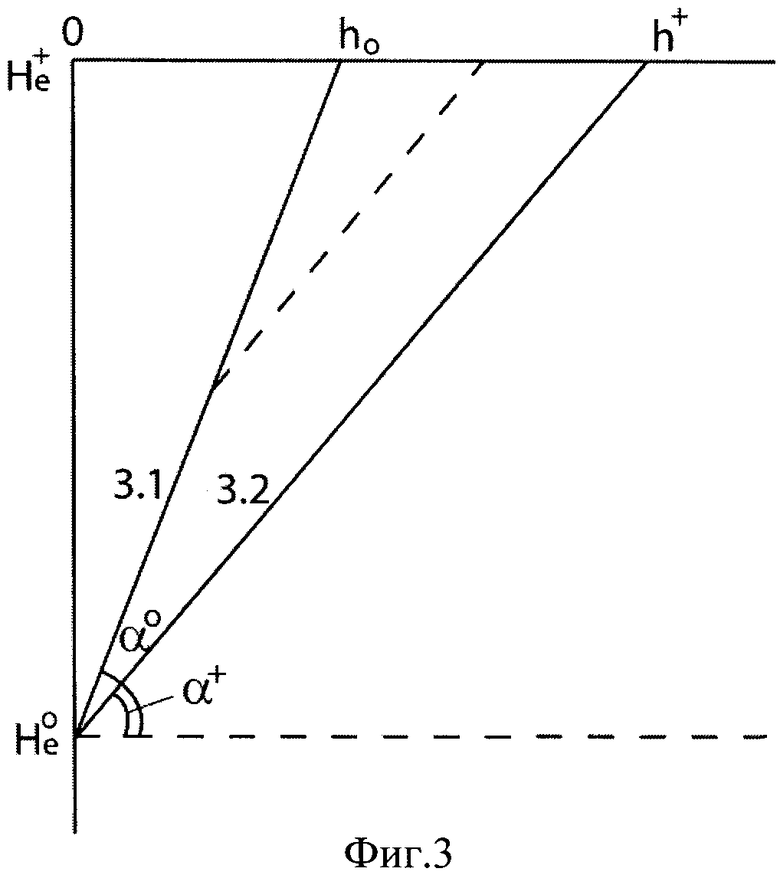
фиг.3 - пересчет геометрической высоты с смежного эшелона на анализируемый эшелон;
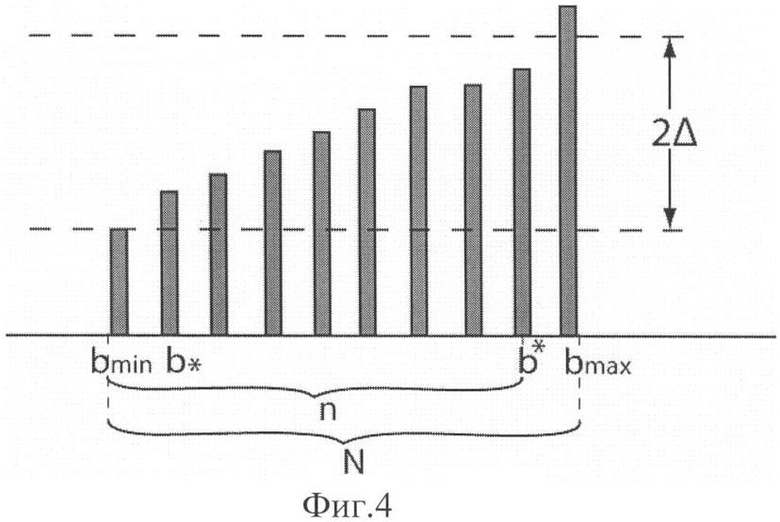
фиг.4 - селекция значений коэффициента сдвига описывающей функции.
Задача мониторинга заключается в выявлении отклонений от высоты заданного эшелона и установлении причин, их вызывающих.
Существуют две основные причины отклонений. Первая состоит в погрешностях измерения высоты барометрическим высотомером, а вторая - в ошибках выдерживания пилотом или автопилотом заданной высоты эшелона по измеренным значениям барометрической высоты.
Измерения барометрической высоты отличаются от истинных ее значений.
Методические ошибки вызваны отклонением от идеальной зависимости статического давления от высоты и неравномерностью изменения температуры с высотой, а именно нестабильностью температурного градиента.
Инструментальные погрешности вызваны не идеальностью характеристик первичного датчика - чувствительного элемента, которым является блок анероидных коробок, преобразующий атмосферное давление в линейное перемещение.
У механических и электромеханических БВ к инструментальным ошибкам добавляются погрешности механизма, реализующего гипсометрическую формулу. У современных цифровых БВ указанная дополнительная погрешность практически отсутствует.
Следует привести необходимые соображения, поясняющие суть предлагаемого способа и его закономерности.
Известно дифференциальное уравнение статики идеальной атмосферы
которое устанавливает связь между изменением атмосферного давления р на высоте h при температуре Т и универсальной газовой постоянной R=29.27 м/град.
В барометрических измерителях высоты реализуется зависимость барометрической высоты Н от давления р
 , при H≤11000 м,
, при H≤11000 м,
 , при H>11000 м.
, при H>11000 м.
В формулу входит также давление ра стандартной атмосферы и р11=169.754 мм рт.ст. (12477,6 Па) - давление на высоте 11 км.
Нулевой точкой отсчета барометрической высоты является изобарическая поверхность с давлением стандартной атмосферы ра=760 мм рт.ст.(101300 Па).
Указанные зависимости соответствуют гипсометрической формуле, для которой известна дифференциальная форма

связывающая изменение барометрической высоты Н с абсолютной температурой стандартной атмосферы Та=288.15 К и относительным изменением давления, причем стандартный температурный градиент τ принимают постоянным и равным 6.5·10-3 град/м.
Для оценки погрешности измерения и ошибки выдерживания высоты эшелона в полете следует использовать более точный измеритель высоты.
Точность измерения геометрической высоты спутниковыми приемниками-вычислителями 1.4, показанными на фиг.1, на порядок и более выше, нежели точность измерения барометрическим методом, причем в дифференциальном режиме с учетом поправок, передаваемых базовыми радиостанциями 1.5, погрешность измерения геометрической высоты составляет 3…4 метра.
Измерения геометрической высоты производят с помощью СНС дискретно во времени, также дискретным образом ведут трансляцию по цифровой линии передачи данных системы автоматического зависимого наблюдения.
Для обработки дискретных замеров предлагается использовать известные α-β фильтры, которые широко применяют в автоматизированных системах УВД. Могут быть использованы также и другие типы фильтров параметров состояния, такие как фильтры Калмана-Бьюси, интервальные фильтры и другие.
Данные фильтры обеспечивают не только сглаживание измерений, но и экстраполяцию и интерполяцию, необходимые для приведения к одному и тому же моменту единого времени.
При кодировании, передаче данных по линии передачи данных (ЛПД), а также при декодировании могут иметь место грубые ошибки, для исключения влияния которых измерения предварительно селектируют.
Недостоверными данными о высоте, полученными из общего радиоканала, считают такие, для которых выполняется неравенство
|Δhi|>|Vy|·θ±ау·θ2/2,
причем Δhi - разность между очередным и предыдущим измерениями геометрической высоты, Vy - измеренная вертикальная скорость, ау - максимально возможное вертикальное ускорение, θ - интервал времени между очередным и предыдущим измерениями.
Обмен информации между ВС и наземными пунктами наблюдения при мониторинге выдерживания заданного высотного эшелона поясняется фиг.1. На ней обозначены ВС 1.1, выполняющие полет на анализируемом эшелоне 1.2 и обменивающиеся данными по ЛПД 1.3.
Точки нулевого отсчета барометрической Н 1.6 и геометрической h 1.7 высот не совпадают, а зависимость между ними в общем случае является нелинейной. Вычислить смещение нулевых начальных точек алгебраически практически невозможно, так как положение изобарической поверхности в пространстве зависит от распределения давления и температуры в приземном слое атмосферы. Пример указанной зависимости показан на фиг.2.
Приведенная на фиг.2 кривая 2.3 при определенных условиях соответствует идеальному БВ и реальной атмосфере. Точно построить указанную зависимость невозможно, однако ее можно аппроксимировать и, притом, различными способами.
В соответствии с данным техническим предложением зависимость между барометрической Н 2.1 и геометрической h 2.2 высотами заменяют линейной аппроксимацией. Изображенная касательная 2.4 соответствует высоте фиксированного эшелона Не°. Правомерность такой замены следует из того, что зависимость имеет малую кривизну, а отклонения от высоты эшелона при полете должны быть невелики, поэтому точность аппроксимации оказывается достаточно высокой. На фиг.2 также показана точка 2.5, соответствующая i-м измерениям, полученным на соответствующем ВС.
В соответствии с заявленным техническим предложением используют описывающую функцию, которая связывает отклонения барометрической и геометрической высот

причем коэффициент масштаба а вычисляют по формуле
где Тн=Та-τ·Н, при Н<11000 м,
ТН=Т11 при Н≥11000 м,
Т - температура наружного воздуха на высоте полета самолета, Т11=216,6 К - температура на высоте 11000 метров, отсчитываемой от изобарической поверхности с давлением ра.
Справедливость этого соотношения следует из формул (1) и (2). Действительная барометрическая высота Н равна значению функции F при точном измерении геометрической высоты h и известных коэффициентах а и b. Геометрический смысл коэффициента сдвига b поясняется фиг.2. Коэффициент сдвига b зависит от большого количества переменных, и вычислить его алгебраическими методами практически невозможно.
В соответствии с предлагаемым способом имеющий локальный характер сдвиг вычисляют на множестве измерений барометрических и геометрических высот путем отбраковки недостоверных данных и осреднения, сравнимых друг с другом.
Для полученного от i-го ВС замера геометрической высоты hi соответствующая величина коэффициента сдвига bi равна

где Не° - относительная барометрическая высота фиксированного анализируемого эшелона, аo - коэффициент описывающей функции для анализируемого эшелона.
Достоверность вычисленной оценки коэффициента сдвига тем выше, чем на большем числе измерений она вычисляется. Горизонтальный размер области воздушного пространства, в котором производят сбор данных и вычисление параметров описывающей функции, задают радиусом DM. Чем больше размер области, тем больше количество ВС в ней находятся и соответственно больше множество измерений высот. Ограничения на величину радиуса указанной области задают, учитывая горизонтальный температурный градиент на данной высоте.
Осреднение позволяет уменьшить влияние случайной составляющей погрешности измерений барометрических высотометров. Поэтому следует использовать данные, полученные от ВС не только на данном фиксированном, но также на смежных эшелонах. Из определения описывающей функции вытекает необходимость приведения измерений, полученных от ВС на смежном эшелоне к данному эшелону.
Коэффициенты масштаба на смежных верхнем а+ и нижнем а- эшелонах отличается от коэффициента масштаба аo для данного эшелона.
Измерения геометрической высоты hj +, полученные на верхнем эшелоне, пересчитывают к данному эшелону по формуле

где Не + - относительная барометрическая высота смежного верхнего эшелона.
Для нижнего эшелона преобразования осуществляют по этой же формуле с соответствующей заменой переменных. Формула поясняется геометрическими построениями, которые приведены на фиг.3, где углы αo и α+ касательных 3.1 и 3.2 равны соответственно
αo=arctg(a°), α+=arctg(a+).
Вычисленные коэффициенты сдвига bi упорядочивают, как это показано на фиг 4. Задают допустимые отклонения от заданной высоты эшелона Δ. Если разность между наибольшим коэффициентом сдвига bmax и наименьшим bmin превышает удвоенную величину Δ, то отбрасывается bmax, при условии bmax-b*>bmin-b*, и bmin - в противном случае. Здесь b* - ближайший элемент к bmax, b* - к bmin. Процесс повторяют, пока все оставшиеся измерения bi не будут укладываться в допустимый интервал.
Окончательную оценку коэффициента сдвига b° получают, усредняя величины bi, где i=1,2,…, n, а n - количество достоверных значений bi, прошедших селекцию.
Погрешность измерения барометрической высоты i-гo БВ при полете на эшелоне Не° в соответствии с данным техническим предложением вычисляют по формуле

причем Hi - измерения БВ, Fi=ao-hi-bo.
Поправка Пi БВ равна - δi.
Отклонения µi от заданной высоты полета возможны также при отказах и неисправностях бортового оборудования и ошибках пилота.
Ошибку пилота или автопилота при отклонении измеренной барометрической высоты от высоты эшелона определяют как разность

Ошибка выдерживания заданной высоты эшелона i-м ВС εi равна

При количестве наблюдаемых ВС больше двух экипажу на экране внутрикабинного индикатора выдается поправка Пi, а также показатель уровня достоверности U, который вычисляют как функцию правдоподобия на основе статистик. Удовлетворительные результаты также дает использование эмпирической формулы

 ,
,
где N - общее количество наблюдаемых ВС, σb - среднеквадратическое отклонение, вычисленное на множестве допустимых оценок коэффициента сдвига.
В соответствии с заявленной целью изобретения в процессе мониторинга выполняют следующие действия.
На наземных пунктах наблюдения, а также в центрах УВД в зоне наблюдения и управления выделяют и фиксируют эшелон Не°, который подлежит анализу, а также выделяют область пространства вокруг него, содержащую один или несколько смежных эшелонов.
Для линейной описывающей функции (3) с использованием данных о температуре окружающей среды, полученных от ВС, находящихся в указанной области пространства, вычисляют коэффициент масштаба а° по формуле (4).
Для каждого ВС согласно (5) вычисляют значения коэффициента сдвига описывающей функции bi, причем измерения геометрических высот, полученные от ВС на смежных эшелонах, пересчитывают к фиксированному эшелону, подлежащему анализу, в соответствии с (6).
Упорядочивают вычисленные для каждого из измерений величины коэффициента сдвига описывающей функции и выделяют те из них, которые принадлежат интервалу допустимых отклонений ±Δ, причем результирующий коэффициент сдвига b° для данного эшелона вычисляют как среднее из указанных коэффициентов по формуле (7).
Вычисляют для каждого из ВС на фиксированном анализируемом эшелоне ошибку пилота или автопилота µi по формуле (9), а также отклонения от высоты заданного эшелона εi, вычисленные по формуле (10).
При выявлении отклонений, превышающих допустимые, формируют сообщения, которые отображают на индикаторе воздушной обстановки и передают на борт соответствующего ВС, причем для каждого ВС документируют измеренные и вычисленные высоты на цифровом магнитофоне или ином устройстве хранения информации.
Для оценки на борту ошибки собственного измерителя барометрической высоты вокруг ВС выделяют область пространства радиусом DM, в которой для ВС, выполняющих полет на указанном собственном эшелоне, а также на одном или нескольких смежных вычисляют по формуле (4) коэффициент масштаба а° описывающей функции.
Для каждого ВС вычисляют коэффициенты сдвига описывающей функции bi согласно (5) на интервале допустимых отклонений ±Δ, причем данные измерений геометрической высоты, полученных от ВС на смежных эшелонах, пересчитывают к собственному эшелону по формуле (6).
С помощью цифрового фильтра сглаживают, интерполируют и экстраполируют данные о собственной геометрической высоте.
Вычисляют ошибку собственного измерителя барометрической высоты 50 согласно (8) как разность между измеренной барометрической высотой и значением описывающей функции (3), в которую подставляют собственную геометрическую высоту ho с выхода цифрового фильтра. Также находят показатель достоверности U, который рассчитывают по формуле (11).
На внутрикабинном индикаторе отображают величину локальной поправки По к показаниям собственного барометрического высотомера, а также для каждого из ВС в указанной области пространства вычисляют разность между высотой указанного ВС и собственной барометрической высотой Нoi=a°(hi - Ho) и представляют экипажу информацию о превышении указанной разности допустимых значений.
Из указанного выше следует, что достигнута цель заявленного технического предложения, а именно способа мониторинга выдерживания заданной высоты полета воздушными судами, состоящего из последовательности операций по получению информации о высоте полета и ее анализе.
Предложенный способ получения уточненной оценки разности барометрических высот ВС, которые совершают полет на одном или смежных эшелонах, увеличивает уровень безопасности полетов и поэтому является промышленно применимым.
Достоинство предлагаемого способа состоит и в том, что он позволяет выявить отдельно погрешности измерений барометрического высотомера и ошибок пилота или автопилота при полете на заданном эшелоне.
Изобретение относится к системам навигации, самолетовождения, управления воздушным движением (УВД). Способ заключается в том, что задают ограниченную область пространства для мониторинга выдерживания высот воздушными судами (ВС) при полете на фиксированном эшелоне, который подлежит анализу. Получают от ВС, находящихся в указанной области пространства, сообщения, отсеивают недостоверные данные, а достоверные запоминают для дальнейшей обработки. Задают вид описывающей функции, аппроксимирующей зависимость между барометрической и геометрической высотами, вычисляют ее коэффициенты, решают описывающую функцию и по данным бортовых измерений вычисляют для каждого ВС отклонение от заданной абсолютной высоты. При выявлении отклонений формируют сообщения, которые отображают на индикаторе воздушной обстановки в центрах УВД, передают на борт соответствующего ВС и документируют на цифровом магнитофоне или ином устройстве хранения информации. Для каждого ВС на борту вычисляют ошибку собственного измерителя барометрической высоты, а также показатель достоверности указанной оценки. На внутрикабинном индикаторе отображают величину поправки к показаниям собственного барометрического высотомера. Для каждого из ВС вычисляют разность между собственной и, полученной от i-го ВС, абсолютными высотами и представляют экипажу информацию о превышении указанной разности допустимых значений. Достигаемый технический результат - повышение достоверности индицируемых данных при полете ВС. 2 з.п. ф-лы, 4 ил.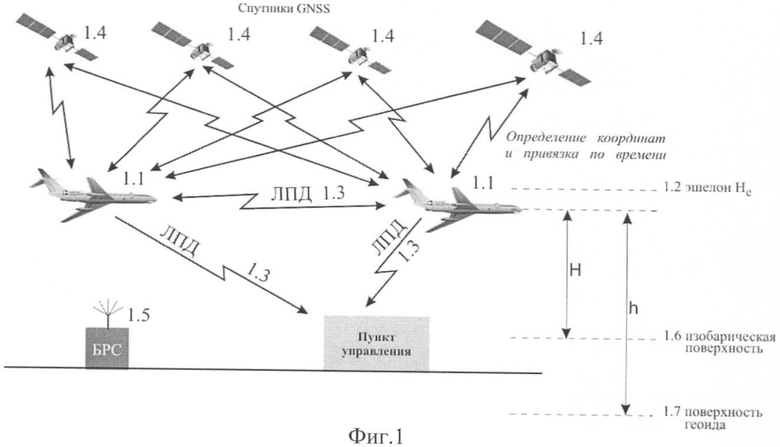
1. Способ мониторинга выдерживания высоты при полете на заданном эшелоне воздушными судами, которые оборудованы бортовыми измерителями координат местоположения и параметров движения, а также высокоточными синхронизированными часами и приемопередающими радиостанциями, которые ведут передачу в один или несколько общих каналов, заключающийся в том, что каждая радиостанция прослушивает общий радиоканал, принимает сообщения от радиостанций, находящихся от нее на расстоянии радиовидимости, и ведет передачу в общий радиоканал, причем передаваемое сообщение содержит идентификатор источника сообщения, данные о координатах местоположения радиостанции, параметры движения, высоту заданного эшелона и измеренную относительную барометрическую высоту, температуру окружающей среды, а также отсчет момента измерений по шкале единого времени, отличающийся тем, что задают ограниченную область пространства для мониторинга выдерживания высот воздушными судами при полете на фиксированном эшелоне, который подлежит анализу, получают от воздушных судов, находящихся в указанной области пространства, сообщения, отсеивают недостоверные данные, а достоверные запоминают для дальнейшей обработки, задают вид описывающей функции, аппроксимирующей зависимость между барометрической и геометрической высотами, вычисляют коэффициенты описывающей функции, решают описывающую функцию и по данным бортовых измерений вычисляют для каждого воздушного судна отклонение от заданной высоты эшелона.
2. Способ по п.1, отличающийся тем, что на наземных пунктах наблюдения, а также в центрах управления воздушным движением в зоне наблюдения и управления выделяют и фиксируют эшелон, который подлежит анализу, а также выделяют область пространства вокруг него, содержащую один или несколько смежных эшелонов, для линейной описывающей функции с использованием данных о температуре окружающей среды, которые получены от воздушных судов, находящихся в указанной области пространства, вычисляют коэффициент масштаба, для каждого воздушного судна вычисляют значения коэффициента сдвига описывающей функции, причем измерения геометрических высот, полученные от воздушных судов, на смежных эшелонах пересчитывают к фиксированному эшелону, подлежащему анализу, упорядочивают вычисленные для каждого из измерений величины коэффициента сдвига описывающей функции и выделяют те из них, которые принадлежат интервалу допустимых отклонений, причем результирующий коэффициент сдвига для данного эшелона вычисляют как среднее из указанных коэффициентов, вычисляют для каждого из воздушных судов на фиксированном анализируемом эшелоне отклонения от заданной барометрической высоты, при выявлении отклонений, превышающих допустимые, формируют сообщения, которые отображают на индикаторе воздушной обстановки и передают на борт соответствующего воздушного судна, причем для каждого воздушного судна документируют измеренные и вычисленные высоты на цифровом магнитофоне или ином устройстве хранения информации.
3. Способ по п.1, отличающийся тем, что вокруг собственного воздушного судна выделяют ограниченную область пространства, в указанной области для воздушных судов, выполняющих полет на эшелоне указанного собственного воздушного судна, а также на одном или нескольких смежных, вычисляют коэффициент масштаба описывающей функции, для каждого воздушного судна вычисляют коэффициенты сдвига описывающей функции на интервале допустимых отклонений, причем данные измерений геометрической высоты, полученные от воздушных судов на смежных эшелонах, пересчитывают к собственному эшелону, с помощью цифрового фильтра сглаживают, интерполируют и экстраполируют данные о собственной геометрической высоте, вычисляют ошибку собственного измерителя барометрической высоты как разность между измеренной барометрической высотой и значением описывающей функции, в которую подставляют собственную геометрическую высоту с выхода цифрового фильтра, а также вычисляют показатель достоверности указанной оценки, на внутрикабинном индикаторе отображают величину поправки к показаниям собственного барометрического высотомера, а также для каждого из воздушных судов в указанной области пространства вычисляют разность между высотой указанного воздушного судна и собственной барометрической высотой, представляют экипажу информацию о превышении указанной разности допустимых значений.
| US 6768449 В1, 27.07.2004 | |||
| СПОСОБ ПЕРИОДИЧЕСКОГО КОНТРОЛЯ (МОНИТОРИНГА) СРЕДСТВ ИЗМЕРЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ САМОЛЕТОВ ПРИ ИХ ЭКСПЛУАТАЦИИ | 2002 |
|
RU2221221C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ФОРМИРОВАНИЯ АБСОЛЮТНОЙ ВЫСОТЫ | 1994 |
|
RU2085851C1 |
| СИСТЕМА ГРУППОВОГО ВОЖДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1997 |
|
RU2123171C1 |
| US 5396425 A, 07.03.1995 | |||
| US 2007197703 A1, 02.08.2007 | |||
| US 2007032920 A1, 08.02.2007 | |||
| WO 2007118108 A2, 18.10.2007. | |||

