Изобретение относится к области авиастроения, в частности к системам обеспечения группового применения управляемых летательных аппаратов - вертолетов и самолетов фронтового назначения.
Известны системы, обеспечивающие управление и наведение группы летательных аппаратов по средствам выдерживания заданных позиционных параметров (дистанций, интервалов, превышений) ведомого летательного аппарата относительно ведущего летательного аппарата, например, система приведенная в книге [1] Боднера В. А. "Система управления летательными аппаратами", М., Машиностроение, 1973, с. 286-299, а также принимаемая в качестве прототипа, описанная в книге [2] Тарасова В.Г."Межсамолетная навигация", М., Машиностроения, 1980, с. 149-182, система, содержащая (см. фиг. 1): первый задатчик параметров движения ЗПД1, первый суммирующий усилитель СУ1, первый блок коррекции БК1, первый контур стабилизации КС1; ДПД1 - первый датчик параметров движения, первый блок связи БС1, второй задатчик параметров движения ЗПД2, второй суммирующий усилитель СУ2, второй блок коррекции БК2, второй контур стабилизации КС2, второй датчик параметров движения ДПД2, второй блок связи БС2.
Здесь, все блоки с индексом "первый" относятся к ведущему летательному аппарату, а с индексом "второй" - к любому ведомому летательному аппарату группы, состоящей из нескольких летательных аппаратов (ЛА).
На ведущем ЛА обеспечивается управление относительно заданного позиционного параметра движения (пространственно-временные траектории) x13(t), поступающего на первый вход СУ1, на второй вход которого поступает измеренный ДПД1 текущий параметр x1, сигнал (x13 - x1) с выхода СУ1 поступает на вход БК1, например, с передаточной функцией  здесь p - оператор дифференцирования, соответственно сигнал
здесь p - оператор дифференцирования, соответственно сигнал  поступает на вход КС1, отрабатывающий поступивший сигнал и действующие возмущения, например, скорость ветра u1, при этом
поступает на вход КС1, отрабатывающий поступивший сигнал и действующие возмущения, например, скорость ветра u1, при этом
здесь r0 = r0(p), R0 = R0(p), r1 = r1(p) - полиномы передаточной функции КС1, T0 - постоянная времени, x10 - начальное отклонение), тогда в замкнутом контуре управления при r0M = 1, T0 • R0N = TR, T - постоянная времени, R = R(p) - полином передаточной функции, будет движение по параметру x1:
Устойчивость и качество управления обеспечивается выбором коэффициентов полинома Q = Q(p).
На ведомом ЛА с выхода ЗПД2 на первый вход СУ2 поступает сигнал заданного параметра движения x23 (заданные дистанция, интервал, превышение), на второй вход СУ2 поступает сигнал измеренного параметра x2, и сигнал x1 с выхода ДПД1 через БС1 по линии радиосвязи (обозначена пунктирной линией на фиг. 1), поступает на вход БС2 и с выхода БС2 на третий вход СУ2, где формируется сигнал (x1 - x23 - x2), поступающий на вход БК2 с передаточной функцией, аналогичной передаточной функции БК1, соответственно КС2 отрабатывает входной сигнал и действующее возмущение u2
(здесь x20 - начальное отклонение), тогда в замкнутом контуре управления ведомого ЛА будет движение по параметру x2:
Например, при R = 1+τp, r1 = pT1, R0 = 1+T2p,
x13 = A0 + A1t, x23 = B0 + B1t,
x1 = C0 + C1t (линейное изменение x1),
u1 = u2 = е0 + е1t (порыв ветра с линейным изменением его скорости), после отработки начальных условий x10, x20, будут иметь место погрешности
Соответственно, при A1 = е1 = 10 м/сек,
T = 2 сек,  B1 = -C1 = 5 м/сек, δ1 = δ2 = 40 м,
B1 = -C1 = 5 м/сек, δ1 = δ2 = 40 м,
что приводит к нарушению выдерживания заданных параметров, соответственно уменьшает безопасность движения в группе ЛА, особенно в плотных боевых строях. Техническим результатом, достигаемым при использовании предлагаемого решения является повышение точности выдерживания заданных параметров (интервалов, дистанций, превышений) движения в группе ЛА, особенно при изменениях во времени заданных параметров движения и действии возмущений.
Достигается технический результат тем, что в систему группового вождения летательных аппаратов, содержащую первый и второй задатчики параметров движения, первый и второй датчики параметров движения, последовательно соединенные первый суммирующий усилитель, первый блок коррекции, первый контур стабилизации, последовательно соединенные второй суммирующий усилитель, второй блок коррекции, второй контур стабилизации, последовательно соединенные по линии радиосвязи первый и второй блоки связи, дополнительно введены последовательно соединенные первый датчик возмущающих воздействий и первый блок интерполяции возмущающих воздействий, обеспечивающие компенсацию возмущающих воздействий на ведущем ЛА, последовательно соединенные второй датчик возмущающих воздействий и второй блок интерполяции возмущающих воздействий, обеспечивающие компенсацию возмущающих воздействий, первый и второй блоки алгебраического суммирования, формирующие сигналы предупреждения об опасном сближении ведущего и ведомого ЛА, блок интерполяции параметров движения, первый и второй блоки переключений, обеспечивающие реконфигурацию структуры системы при возникновении ситуации опасного сближения, первый и второй блоки интерполяции заданных параметров движения, обеспечивающие точное наведение на заданные пространственно-временные траектории.
На фиг. 1 представлена блок-схема прототипа, обозначения блоков приведено выше.
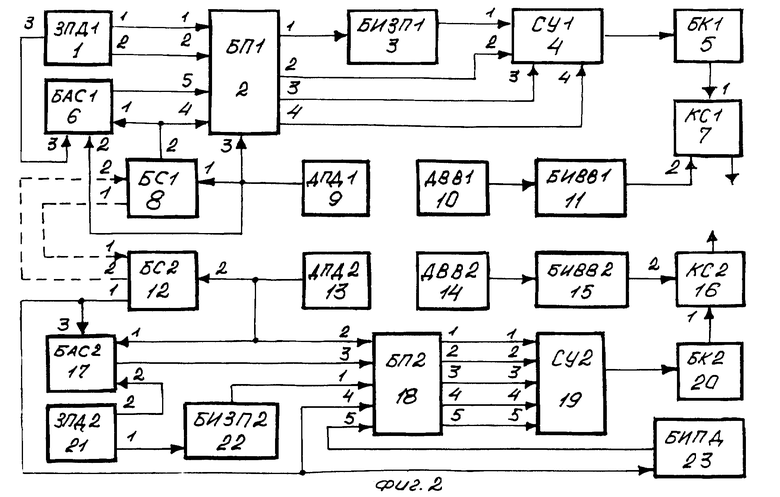
На фиг. 2 представлена блок-схема предлагаемой системы, содержащей:
1 - первый задатчик параметров движения ЗПД1,
2 - первый блок переключений БП1,
3 - первый блок интерполяции заданных параметров движения БИЗП1,
4 - первый суммирующий усилитель СУ1,
5 - первый блок коррекции БК1,
6 - первый блок алгебраического суммирования БАС1,
7 - первый контур стабилизации КС1,
8 - первый блок связи БС1,
9 - первый датчик параметров движения ДПД1,
10 - первый датчик возмущающих воздействий ДВВ1,
11 - первый блок интерполяции возмущающих воздействий БИВВ1,
12 - второй блок связи БС2,
13 - второй датчик параметров движения ДПД2,
14 - второй датчик возмущающих воздействий ДВВ2,
15 - второй блок интерполяции возмущающих воздействий БИВВ2,
16 - второй контур стабилизации КС2,
17 - второй блок алгебраического суммирования БАС2,
18 - второй блок переключений БП2,
19 - второй суммирующий усилитель СУ2,
20 - второй блок коррекции БК2,
21 - второй задатчик параметров движения ЗПД2,
22 - второй блок интерполяции заданных параметров движения БИЗП2,
23 - блок интерполяции параметров движения БИПД.
Пунктиром обозначены линии радиосвязи между БС1(8) и БС2(12).
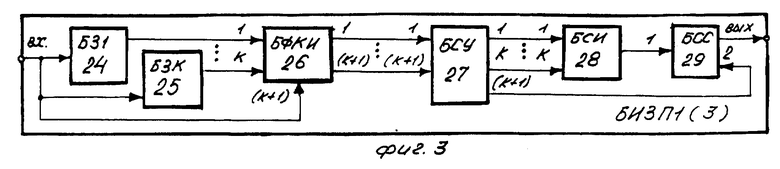
На фиг. 3 представлены блок-схема БИЗП1(3), содержащего:
24 - первый блок запаздывания БЗ1,
25 - к-ый блок запаздывания БЗК,
26 - блок формирования коэффициентов интерполяции БФКИ,
27 - блок суммирующих усилителей БСУ,
28 - блок суммирующих интеграторов БСИ,
29 - блок суммирования БСС.
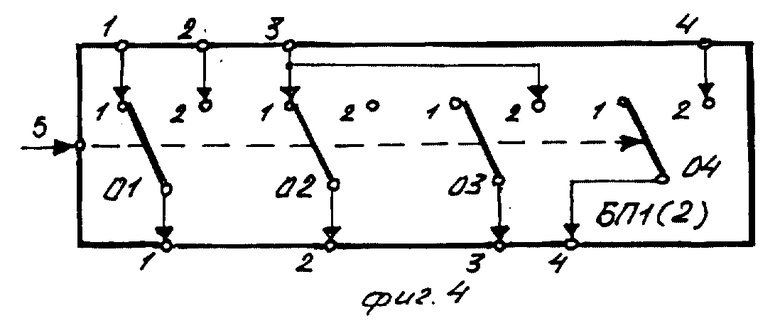
На фиг. 4 представлена схема БП1(2)-стандартного релейного переключателя, содержащего четыре контактных двупозиционных группы 01; 02; 03; 04.
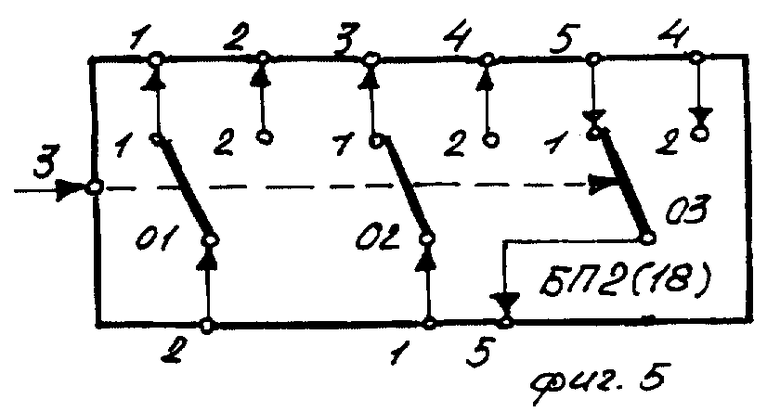
На фиг. 5 представлена схема БП2(18) - стандартного релейного переключателя, содержащего три контактных двупозиционных группы - 01; 02; 03.
Примеры технического выполнения блоков приведены: ДПД, ДВВ - в книге [3] Помыкаева И.И. и др. "Навигационные приборы и системы", М., Машиностроение, 1983, с. 374-398; БК, КС - в [1], [2] и в книге [4] Михалева И.А. и др. "Системы автоматического управления самолетом", М., Машиностроение, 1971, с. 255, 373, 391;
БС в [2], с. 29-46.
БАС, СУ, ЗПД в книге [5] Тетельбаума И.М., Шнейдера Ю.Р. "400 схем для АВМ", М., Энергия, 1978, с. 8, 9, 106.
Система группового вождения ЛА работает следующим образом.
Сигнал измеренного параметра x1 (высота, боковое отклонение, продольная координата) ведущего ЛА с выхода ДПД(9) поступает на первый вход БС1(8), на второй вход БАС1(6) и на третий вход БП1(2). Сигнал измеренного параметра x2 ведомого ЛА с выхода ДПД2(13) поступает на первый вход БАС2(17), на второй вход БП2(18) и на второй вход БС2(12), с первого выхода БС1(8) по линии радиосвязи сигнал x1 поступает на первый вход БС2(12), с первого выхода которого сигнал x1 поступает на третий вход БАС2(17), на четвертый вход БП2(18) и на вход БИПД(23). Со второго выхода БС2(12) сигнал x2 по линии радиосвязи поступает на второй вход БС1(8), со второго выхода которого сигнал x2 поступает на четвертый вход БП1(2) и на первый вход БАС1(6), на третий вход которого с третьего выхода ЗПД1(1) поступает сигнал xп предупреждения об опасности сближения ведущего и ведомого ЛА. В БАС1(6) формируется разностный сигнал Δ1 = xп-x1+x2 = xп-(x1-x2) = xп-Δ, который с выхода БАС1(6) поступает на пятый вход БП1(2), на первый и второй входы которого с первого и второго выходов ЗПД1(1) поступают соответственно сигнал заданного параметра движения ведущего ЛА - x13 и сигнал заданного относительного параметра (с коэффициентом 0,5) - 0,5 x23. БП1(2) является стандартным релейными элементом, содержащим четыре контактные группы - 01; 02; 03; 04 (см.фиг.4), нормально замкнутых (положение 0j-1, j=1-4) при Δ1 ≤ 0 на пятом входе (отсутствие опасного сближения ведущего и ведомого ЛА) и переключаемых в положение (0j-2) при Δ1 > 0 - наличие опасного сближения. При Δ1 ≤ 0 на первый выход БП1(2) с его первого входа поступает сигнал x13, на второй выход БП1(2) с его третьего входа поступает сигнал x1, на третий и четвертый выходы БП1(2) поступают нулевые сигналы. Со второго, третьего и четвертого выходов БП1(2) сигналы x1, 0,0, поступают на второй, третий и четвертый входы СУ1(4). С первого выхода БП1(2) сигнал x13 поступает на вход БИЗП1(3).
Если x13(t) = A0 + A1t + ... + Ak tk, соответственно x13(t) = A1 + ... + k•Aktk-1, ...,  тогда
тогда  .
.
В БИЗП1(3) сигнал x13 поступает на входы БЗ1(24),..., БЗК(25) и на (k+1)-ый вход БФКИ(26). В БЗ1(24),..., БЗИ(25), формируются сигналы с временными запаздываниями x13(t-τ1),..., x13(t-τk), поступающие соответственно на первый, ..., к-ый входы БФКИ(26), в котором формируются коэффициенты интерполяционного многочлена A0, A1,..., Ak, которые с первого,..., (k+1)-го выходов БФКИ(26) поступают на первый,..., (k+1)-ый входы БСУ(27), реализованного на (k+1)-ом суммирующих усилителях, выполняющих операции умножения на постоянную известную величину и сложение.
В БСУ(27) формируются при известных величинах a0,..., ak сигналы
bk = a0Ak, bk-1 = a0Ak-1 + k•Ak•a1,...,
b1 = a0A1 + 2a1A2 +...+(k-1)! Akak-1,
b0 = a0 A0 + a1A1 +2 a2A2 +...+ k!akAk.
Сигналы bk,...,b1 с первого, ..., k-20 выходов БСУ(27) поступают на первый, . . ., k-ый входы БСИ(28). БСИ(28) выполнен на "k" последовательно-соединенных суммирующих интеграторах, на которых формируется сигнал (bktk+... +b1t), поступающий на первый вход БСС(29), на второй вход которого с (k+1)-20 выхода БСУ(27) поступает сигнал b0. БСС(29) формирует заданный сигнал управления
x1y = b0(b1t +...+ bktk)=x13(a0+a1p+...+akpk)= x13•Q(p), поступающий с выхода БИЗП1(3) на первый вход СУ1(4), в котором по поступившим сигналам формируется сигнал (x1y- x1), поступающий на вход БК1(5), имеющий передаточную функцию  (здесь степень полинома M(p) меньше или равна степени полинома N(p)).
(здесь степень полинома M(p) меньше или равна степени полинома N(p)).
Примеры технической реализации суммирующих усилителей, суммирующих интеграторов, блока суммирования, блоков запаздывания, блока коррекции, приведены в книге [5] на с.8, 9, 25, 49.
Пример реализации БФКИ(26) приведен в [6] "Справочнике по математике", И.Н.Бронштейн, К.А.Семендяев, М., Наука, 1986, с.503.
С выхода БК1(5) сигнал  поступает на первый вход КС1(7).
поступает на первый вход КС1(7).
С выхода ДВВ1(10) сигнал возмущающего воздействия (составляющие скорости ветра) U1(t) поступает на вход БИВВ1(11), который по техническому исполнению аналогичен БИЗП1(3). На выходе БИВВ1(11) формируется сигнал
u1rв = u1rв(p) = u1(d0+d1p + ...+ dmPm),
поступающий на второй вход КС1(7), отрабатывающий начальные условия, входные сигналы и действующие возмущения (см. книгу [7] Загайнова Г.И., Гуськова Ю.П. "Управление полетом самолетов", М., Машиностроение, 1980, с.161, 169, 171):
при Mr0=1, NT0R0 = TR, R = 1+C1p+...+ Cnpn,
Q = 1+ Tp + TC1p2 + ...+ TCnpn+1, при n+1 = k
T = a1, ..., TCn = ak, Q = 1 + a1p + a2p2 +... + akpk, соответственно при a0 = 1, x1y = x13(1+a1p +...+akpk) и при r1 = rв, u1(r1 - rв) = 0.
При выборе коэффициентов ak, обеспечивающих заданное качество управления (см. книгу [8] Кузовкова Н. Т. "Модальное управление и наблюдающие устройства", М., Машиностроение, 1976),  соответственно x1 _→ x13, т. е. после отработки начальных условий текущие параметры движения ведущего ЛА x1 равны заданным x13.
соответственно x1 _→ x13, т. е. после отработки начальных условий текущие параметры движения ведущего ЛА x1 равны заданным x13.
На ведомом ЛА сигнал предупреждения об опасном сближении xn со второго выхода ЗПД2(21) поступает на второй вход БАС2(17), в котором по поступившим сигналам формируется сигнал Δ1 = xп-x1+x2= xп-Δ, который с выхода БАС2(17) поступает на третий вход БП2(18). С первого выхода ЗОД2(21) сигнал заданного относительного параметра x23 (заданные дистанция, интервал, превышение) поступает на вход БИЗП2(22), который по техническому исполнению аналогичен БИЗП1(3).
На выходе БИЗП2(22) формируется заданный сигнал управления x2y = x23 (a0 + a1p +...+ akpk) = x23Q, поступающий на первый вход БП2(18).
БИПД(23) по техническому исполнению аналогичен БИЗП1(3). На выходе БИПД(23) формируется сигнал x1k = x1(a0+ a1p + ...+ akpk) = x1Q, поступающий на пятый вход БП2(18).
БП2(18) является стандартным релейным элементом, содержащим три контактные группы - 01; 02; 03 (см. фиг.5), нормальнозамкнутые (положение 0j-1; j = 1; 2; 3) при Δ1 ≤ 0 на третьем входе (отсутствие опасного сближения ведущего и ведомого ЛА) и переключаемых в положение (0j-2; j= 1; 2; 3) при Δ1 > 0 - - наличие опасного сближения.
При Δ1 ≤ 0 на выходах БП2(18) будут сигналы:
- сигнал x2 на первом выходе,
- сигнал, равный нулю, на втором выходе,
- сигнал x2y на третьем выходе,
- сигнал, равный нулю, на четвертом выходе,
- сигнал x1k на пятом выходе.
Первый-пятый выходе БП2(18) подключены соответственно к первому-пятому входам СУ2(19), где (соответственно при Δ1 ≤ 0) формируется сигнал (x1k - x2y - x2), поступающий на вход БК2(20), где формируется сигнал  поступающий на первый вход КС2(16).
поступающий на первый вход КС2(16).
С выхода ДВВ2(14) сигнал возмущающего воздействия u2(t) поступает на вход БИВВ2(15), который по техническому исполнению аналогичен БИЗП1(3). На выходе БИВВ2(15) формируется сигнал u2rb = u2rb(p) = u2(d0 + d1p+... + dmpm), поступающий на второй вход КС2(16), отрабатывающий начальные условия, входные сигналы и действующие возмущения, при этом
откуда по аналогии с КС1(7),
откуда следует, что при r1 = rв, u2(r1 - rв) = 0, x2 _→ x1-x23,
x2 _→ x1-x23,
т. е. после отработки начальных условий и при компенсации составляющих возмущений ведомый объект выдерживает относительно ведущего заданный параметр движения практически без погрешностей.
При возникновении ситуации опасного сближения, обычно связанной с отказами оборудования или неправомерными действиями экипажа, на пятом входе БП1(2) и на третьем входе БП2(18) сигнал Δ1 > 0, тогда на выходах БП1(2) будут сигналы:
- сигнал 0,5 x23 на первом выходе,
- сигнал, равный нулю, на втором выходе,
- сигнал x1 на третьем выходе,
- сигнал x2 на четвертом выходе.
По поступившему сигналу 0,5 x23, на выходе БИЗП1(13) формируется сигнал 0,5 x23Q, поступающий на первый вход СУ1(4), на второй, третий и четвертый входы которого поступают сигналы 0, x1,x2 соответственно со второго, третьего и четвертого выходов БП1(2).
В СУ1(4) формируется сигнал (0,5 x32Q - 0,5x1 + 0,5 x2), поступающий на вход БК1(5), где формируется сигнал  , поступающий на первый вход КС1(7), на второй вход которого поступает сигнал u1rb.
, поступающий на первый вход КС1(7), на второй вход которого поступает сигнал u1rb.
Теперь будет иметь место движения ведущего ЛА:
Соответственно при Δ1 > 0 на третьем входе, на выходах БП2(18) будут сигналы:
- сигнал, равный нулю, на первом выходе,
- сигнал x2 на втором выходе,
- сигнал, равный нулю, на третьем выходе,
- сигнал x23 на четвертом выходе,
- сигнал x1 на пятом выходе.
В СУ2(19) формируется сигнал
0,5 x1 - 0,5 x23Q - 0,5 x2 = 0,5 (x1-x23Q - x2), соответственно будет иметь место движения ведомого ЛА:
Относительное движение, как разность уравнений (1) и (2), имеет вид:
при x1-x2 = Δ,
откуда следует, что начальные условия отрабатываются к нулю, составляющие возмущений при r1 = rb компенсируются и Δ _→ x23, т.е. точно выдерживаются заданные параметры движения ведомого ЛА относительно ведущего ЛА x23(t) - интервал, дистанция, превышение, что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС НАВЕДЕНИЯ И УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1996 |
|
RU2112268C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 1995 |
|
RU2089449C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ ГРУЗА В ГРУЗОВУЮ КАБИНУ ЛЕТАТЕЛЬНОГО АППАРАТА И ВЫГРУЗКИ ГРУЗА ИЗ НЕЕ | 2000 |
|
RU2186002C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2120885C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ЭЛЕМЕНТОВ ВОЗДУШНОГО ВИНТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2137108C1 |
| СПОСОБ ВЫЯВЛЕНИЯ АСИНХРОННОГО РЕЖИМА ЭЛЕКТРОПЕРЕДАЧИ | 1997 |
|
RU2117374C1 |
| СПОСОБ РАДИОСВЯЗИ С МНОЖЕСТВЕННЫМ ДОСТУПОМ | 2008 |
|
RU2386212C1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ЭЛЕМЕНТОВ ВОЗДУШНОГО ВИНТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2102713C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ВЕРТОЛЕТА ВСЕПОГОДНОГО И КРУГЛОСУТОЧНОГО ПРИМЕНЕНИЯ | 1997 |
|
RU2119646C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЛОПАСТЕЙ И ЛОНЖЕРОНОВ ЛОПАСТЕЙ ВОЗДУШНЫХ ВИНТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ДРУГИХ ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1996 |
|
RU2115594C1 |
Изобретение предназначено для использования в авиации, в частности, для оснащения и обеспечения групповых действий вертолетов и самолетов фронтовой авиации. Технический результат заключается в повышении точности выдерживания заданных параметров движения в группе летательных аппаратов. Технический результат достигается за счет того, что в систему группового вождения летательных аппаратов, содержащую на ведущем (первом) и ведомом (втором) летательных аппаратах первые и вторые задатчики параметров движения, датчики параметров движения, суммирующие усилители, блоки коррекции, контуры стабилизации, блоки связи, дополнительно введены первые и вторые датчики возмущающих воздействий и блоки интерполяции возмущающих воздействий, блок интерполяции параметров движения, первые и вторые блоки алгебраического суммирования, блоки переключений, первый и второй блоки интерполяции заданных параметров движения. 1 з.п.ф-лы, 5 ил.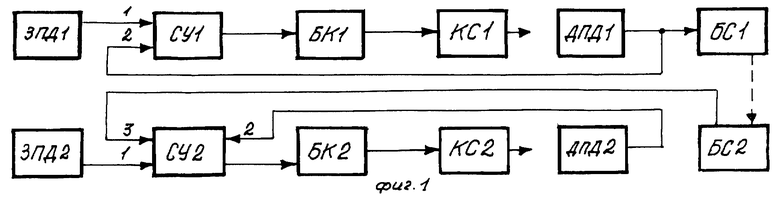
| Тарасов В.Г | |||
| Межсамолетная навигация | |||
| - М.: Машиностроение, 1980, с.149-182 | |||
| Боднер В.А, Система управления летательными аппаратами | |||
| - М.: Машиностроение, 1973, с.286-299 | |||
| US 4112755 A, 12.09.78 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1983 |
|
SU1133967A1 |
| Помыкаев И.И | |||
| и др | |||
| Навигационные приборы и системы | |||
| - М.: Машиностроение, 1983, с.374-398 | |||
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1971, с.255, 373, 391 | |||
| Тетельбаум И.М | |||
| и др | |||
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
| - М.: Энергия, 1978, с.8, 9, 106 | |||
| Бронштейн К.А | |||
| Справочник по математике | |||
| - М.: Наука, 1983, с.503. | |||
