Изобретение относится к геофизическому приборостроению и может быть использовано при изучении гравитационного поля Земли и других небесных тел, в частности для картографирования гравитационных аномалий Земли и других объектов.
Известно устройство для измерения силы тяжести с борта летательного аппарата, содержащее подключенные к измерительно-регистрирующему блоку с устройством опроса датчиков демпфированный струнный гравиметр, установленный в подвесе кардана, струнный измеритель вертикальной скорости, радиовысотомер, микробарометр, радионавигационную систему, камеру для съемки земной поверхности, блок обработки данных, фазовый дискриминатор, преобразователь угол-частота, контрольно-согласующее устройство, при этом к фазовому дискриминатору подключена инерциальная навигационная система, размещенная в подвесе кардана гравиметра, к преобразователю угол-частота подключена курсовая система, а к контрольно-согласующему устройству подключен доплеровский измеритель скорости и сноса [1]
Недостатком известного устройства является недостаточная точность определения поправки Этвеша, обусловленная отсутствием коррекции курсовой системы от случайных и систематических погрешностей, а также то, что демпфированный струнный гравиметр недостаточно компенсирует влияние низкочастотных ускорений летательного аппарата (например, самолета и/или вертолета в диапазоне частот 3-20 Гц).
Известно устройство для бортовой гравиметрической съемки, содержащее летательный аппарат, устройство для управления полетом летательного аппарата по заданному маршруту на выбранном эшелоне, включая устройство для управления летательным аппаратом в вертикальной плоскости без изменения угла тангажа; устройства контроля, включающие набор высотомеров для определения выбранного эшелона для коррекции траектории летательного аппарата, которые связаны с записывающими устройствами; навигационные устройства, связанные с записывающими устройствами; сигнальные устройства, включающие гравиметр и магнитные устройства, связанные с записывающими устройствами через аналого-цифровые преобразователи; вычислительные устройства для определения отклонения летательного аппарата от заданной траектории.
При этом в качестве записывающих устройств (накопителя информации) использован многоканальный магнитофон с чувствительностью записи не хуже 0,0001 В и с интервалом записи цифровых сигналов порядка одной секунды. Набор высотомеров включает по крайней мере барометрический, радио2 и лазерный высотомеры, а приемник давления барометрического высотомера расположен так, что воспринимает только статическое давление атмосферы, для чего он выполнен, по крайней мере, в виде двух узкополосных барометрических преобразователей, установленных в одной камере, сообщающейся с приемником давления. Навигационные устройства включают электронное дальномерное устройство прямой видимости для измерения по крайней мере трех дальностей в течение заранее определенного интервала времени, приемо-индикатор спутниковой навигационной системы типа "NAVY Transit Satellite Locations", спутниковую интерферометрическую систему. Указанный выше гравиметр установлен в защищенной герметической камере [2]
Описанное устройство обеспечивает выдерживание летательным аппаратом выбранного эшелона и стабилизацию скорости и курса, что позволяет создавать совокупность траекторий полета для площадной аэрогравиметрической съемки гравитационных аномалий Земли. При этом средняя ошибка измерений силы тяжести не превышает по модулю 1 мГал на фоне ускорений летательного аппарата порядка 105 мГал. Это обеспечивает масштаб картографирования порядка 1: 500000-1:1000000.
Недостатки известного устройства заключаются в следующем.
Наличие устройства для управления летательным аппаратом в вертикальной плоскости без изменения угла тангажа накладывает жесткие ограничения на аэродинамические условия полета, вследствие чего известное устройство используется предпочтительно в ночное время, когда состояние атмосферы более стабильно. Существенным недостатком является требование для автопилота любого летательного аппарата по обеспечению вертикального движения во время полета со стабильностью в пределах 2,5 м за 30 с полета на выбранном эшелоне. В условиях турбулентной атмосферы указанные требования практически невыполнимы.
В случае использования вертолета в качестве носителя известного устройства требуется точная регулировка несущих лопастей вертолета для обеспечения плавности полета, что дополнительно усложняет систему. Однако это не обеспечивает компенсацию низкочастотных (3-20 Гц) инерционных ускорений.
Указанные недостатки приводят к снижению точности определения гравитационных аномалий и производительности аэрогравиметрической съемки. Кроме того, к снижению точности измерений приводят случайные измерения курса летательного аппарата, вызванные накоплением ошибок в используемых навигационны системах, что не позволяет в полной мере скомпенсировать поправку Этвеша.
Задачей, на решение которой направлено изобретение, является разработка и создание аэрогравиметрического комплекса с улучшенными основными технико-эксплуатационными характеристиками, обеспечивающими расширение диапазона аэродинамических условий полета носителя, что позволяет повысить производительность аэрогравиметрических съемок с возможностью продуцирования карт гравитационных аномалий в редукции Буге масштабов 1:200000 и крупнее.
Технический результат, достигаемый при осуществлении изобретения, выражается в повышении точности измерения значений ускорения силы тяжести с борта летательного аппарата типа самолет, вертолет, дистанционно-пилотируемый летательный аппарат.
Другие технические результаты характеризуются повышением помехоустойчивости измерений к виброинерционным помехам, быстродействия аэрогравиметрического комплекса и в целом производительности аэрогравиметрических съемок.
Указанный технический результат достигается тем, что известное устройство для бортовой гравиметрической съемки, содержащее летательный аппарат, автопилот, бортовой вычислитель, первый гравиметр, инерциальную навигационную систему, бортовой приемо-индикатор спутниковой навигационной системы, радиовысотомер, лазерный высотомер, барометрический высотомер, накопитель информации, снабжено наземным оборудованием, содержащим подключенные к наземному вычислителю наземный (донный) гравиметр, первый приемо-индикатор спутниковой навигационной системы, установленный в геодезическом пункте, второй приемо-индикатор спутниковой навигационной системы, установленный в опорном пункте, стример, регистрирующее устройство, а в бортовое оборудование введены второй и третий гравиметры, астроориентатор, барометрический измеритель вертикальной скорости, амортизатор низкочастотных инерционных ускорений, причем астроориентатор, первый, второй и третий гравиметры установлены на гиростабилизированной платформе инерциальной навигационной системы, последняя связана с корпусом летательного аппарата через амортизатор низкочастотных инерционных ускорений, выходы астроориентатора, инерциальной навигационной системы, первого, второго и третьего гравиметров, бортового приемо-индикатора спутниковой навигационной системы, радиовысотомера, лазерного высотомера, барометрического высотомера и барометрического измерителя вертикальной скорости подключены к бортовому вычислителю, один выход которого соединен с автопилотом летательного аппарата, второй выход с инерциальной навигационной системой, третий выход с накопителем информации.
В качестве радиовысотомера использован радиолокатор сантиметрового диапазона волн.
Инерциальная навигационная система смонтирована в контейнере, который снабжен узлами крепления элементов амортизатора низкочастотных инерционных ускорений, причем узлы крепления расположены симметрично в горизонтальной плоскости, в которой находится центр масс контейнера с содержимым, и симметрично вертикальной оси, приходящей через центр масс.
Амортизатор низкочастотных инерционных ускорений выполнен в виде ортогонально расположенных упругих элементов, например металлических спиральных пружин, и демпфирующих элементов, например воздушных или гидравлических, при этом одни концы упругих элементов прикреплены к конструкции летательного аппарата жестко, а одни концы демпфирующих элементов шарнирно, другие концы упругих элементов и другие концы демпфирующих элементов соединены вместе и связаны шарнирно с узлами крепления на контейнере, в котором установлена инерциальная навигационная система.
Причинно-следственные связи между отличительными признаками заявленного изобретения и техническим результатом следующие.
Как известно, при выполнении съемочного галса должны выдерживаться следующие параметры полета: горизонтальные координаты летательного аппарата, высота, горизонтальное и вертикальное ускорения. Допустимые погрешности определения горизонтальных координат и высоты зависят от масштаба продуцируемых карт. В прототипе навигационная система позволяет определять горизонтальные координаты с погрешностью ≅ 500 м, высоту ≅ 3 м, что соответствует картам с масштабом 1:500000.
Погрешности навигационной системы, корректируемой по координатам, в основном определяются курсовыми ошибками инерциальной системы и высотомеров:
ΔΨ = ΔΨ0 + KΔΨ • t,
где DJ0 ошибка начальной выставки инерциальной навигационной системы (2-3 угловые минуты); KΔΨ 1-2 угловые минуты/час.
Следовательно, например за 6 ч полета курсовая ошибка превысит 10 угловых минут.
В заявленном изобретении благодаря введению астроориентатора ошибка DJ не превышает 1-2 угловых минут и не зависит от времени. Кроме того, информация, получаемая от астроинерциальной системы, наряду с информацией, получаемой от барометрического измерителя вертикальной скорости, используется для измерения высоты и вертикальной скорости, что позволило ввести в автопилот управление и по высоте и по вертикальной скорости более точно. В свою очередь это обеспечивает повышение точности выдерживания курса и высоты полета при выполнении съемочного галса.
Введение амортизатора, собственная резонансная частота которого не превышает 3 Гц, позволяет уменьшить влияние вибраций, но главное в значительной мере компенсировать воздействие низкочастотных (3-20 Гц) аэроупругих колебаний и инерционных ускорений летательного аппарата на работу астроориентатора, инерциальной навигационной системы и гравиметров.
Увеличение количества бортовых гравиметров (с одного до трех) повышает точность их работы за счет использования эффекта внутренней сходимости показаний и адаптивных моделей ошибок их работы. Размещение гравиметров на гиростабилизированной платформе инерциальной навигационной системы, которая связана с корпусом летательного аппарата через амортизатор низкочастотных инерционных ускорений, обеспечивает уменьшение помех при измерении вертикальной составляющей полного ускорения.
Использование в качестве радиовысотомера радиолокатора сантиметрового диапазона волн позволило обеспечить измерение высоты над водной поверхностью (морем) с учетом ошибок, обусловленных волнением поверхности воды, а также высоты рельефа подстилающей местности при выполнении съемочного галса с точностью, необходимой для продуцирования карт гравитационных аномалий в масштабе 1:200000 и крупнее в редукции Буге.
Введение в наземное оборудование приемо-индикаторов спутниковой навигационной системы, работающих в фазодифференциальном режиме, и наземного (донного в случае работы над шельфом) гравиметра, установленного на опорном пункте, обеспечивает точное измерение абсолютного значения силы тяжести в опорном пункте. Использование стримера, выдающего информацию о величинах притяжения промежуточного слоя между уровнем моря и поверхностью суши, обеспечивает продуцирование карт непосредственно в редукции Буге.
Таким образом, совокупность отличительных признаков заявленного изобретения обеспечивает повышение точности измерения гравитационных аномалий за счет уменьшения ошибок определения координат местоположения летательного аппарата и улучшения помехоустойчивости измерений к виброинерционным помехам, а также повышение быстродействия аэрогравиметрического комплекса и в целом производительности аэрогравиметрических съемок.
Результаты аналитических расчетов и математического моделирования на математической модели аэрогравиметрического комплекса показали принципиальную возможность измерения гравитационных аномалий на борту летательного аппарата со среднеквадратичной погрешностью порядка 0,7 мГал.
Проведенный анализ уровня техники показал, что в выявленных источниках патентной и научно-технической информации решения, характеризующиеся признаками, тождественными всем признакам заявленного изобретения, отсутствуют, а изобретение явным образом из уровня техники не следует. В уровне техники не выявлена известность влияния на получение указанного технического результата преобразований, обусловленных совокупностью отличительных признаков, включенных в формулу изобретения. Это дает основание полагать, что заявленное изобретение соответствует условиям патентоспособности "новизна" и "изобретательский уровень".
Сущность изобретения поясняется графическими материалами.
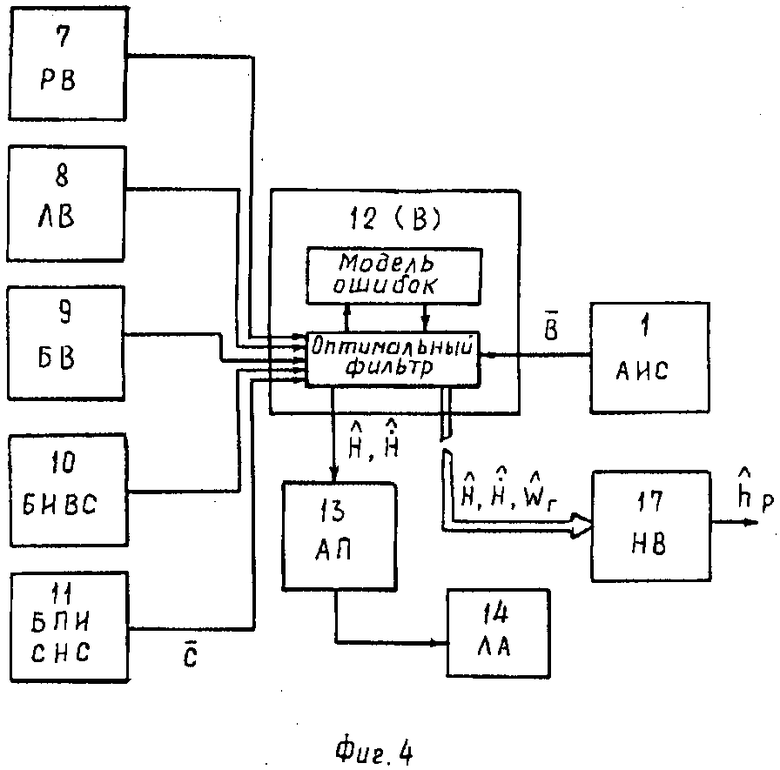
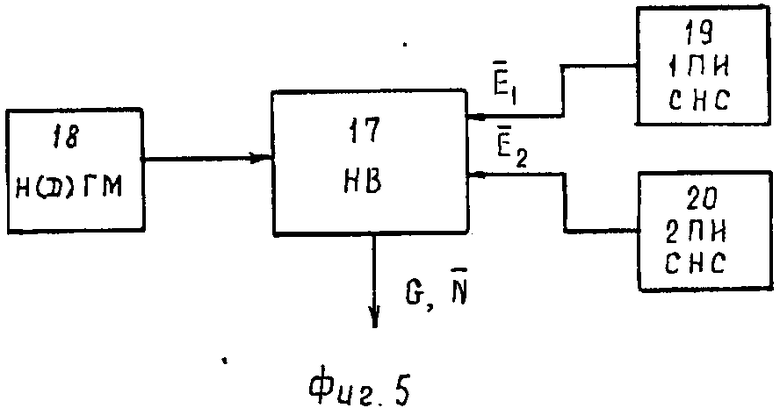
На фиг. 1 представлена структурная схема аэрогравиметрического комплекса; на фиг. 2 схема устройства амортизатора низкочастотных инерционных ускорений; на фиг. 3 блок схема астрокоррекции инерциальной навигационной системы; на фиг. 4 блок-схема измерения высоты, вертикальной скорости, вертикального и горизонтального ускорений, высоты рельефа подстилающей поверхности; на фиг. 5 блок-схема измерения величины абсолютного ускорения силы тяжести в опорном пункте.
Аэрогравиметрический комплекс включает бортовое и наземное оборудование (фиг. 1).
В состав бортового оборудования входят: астроинерциальная система (АИС) 1, содержащая астроориентатор (АО) 2 и инерциальную навигационную систему (ИНС) 3; первый (1ГМ) 4, второй (2ГМ) 5 и третий (3ГМ) 6 гравиметры; радиовысотомер (РВ) 7, лазерный высотомер (ЛВ) 8, барометрический высотомер (БВ) 9; барометрический измеритель вертикальной скорости (БИВС) 10; бортовой приемо-индикатор спутниковой навигационной системы (БПИ СНС) 11; бортовой вычислитель (В) 12 с внешним интерфейсом ввода-вывода (на схеме не показан); автопилот (АП) 13 летательного аппарата (ЛА) 14; амортизатор низкочастотных инерционных ускорений (АНИУ) 15; накопитель информации (НИ) 16. Информационные выходы указанных датчиков первичной информации подключены к бортовому вычислителю (В) 12. Его первый (управляющий) выход соединен с автопилотом (АП) 13, второй (управляющий) выход с инерциальной навигационной системой (ИНС) 3, третий (информационный) выход с накопителем информации (НИ) 16.
Астроинерциальная система 1 образована путем установки астроориентатора 2 на гиростабилизированную платформу инерциальной навигационной системы 3. Использован двухмерный астроориентатор, предназначенный для измерения двух координат (широта и долгота) местонахождения и истинного курса летательного аппарата посредством пеленгации двух небесных светил (см. например, Селезнев В. П. Навигационные устройства. Учебное пособие. М. Машиностроение, 1974, с. 476-480, рис. 13.19). В заявленном комплексе из схемы известного астроориентатора взят телескоп с фотоприемником и электронной следящей системой. На гиростабилизированную платформу ИНС 3 телескоп установлен в кардановом подвесе. Выход фотоприемника астроориентатора 2 подключен к бортовому вычислителю 12, в котором формируются корректирующие поправки для гироскопов ИНС 3 и подаются в нее со второго (управляющего) выхода В 12.
На этой же гиростабилизированной пластформе ИНС 3 установлены гравиметры 4, 5, 6, выходы которых подключены к бортовому вычислителю 12.
Гравиметры 4, 5, 6, выполнены идентичными, например в виде демпфированных струнных гравиметров. Такой гравиметр содержит груз, подвешенный к раме с помощью струны. Верхний конец струны электрически изолирован от рамы. Струна помещена между полюсами постоянного магнита, а ее концы подключены к генератору колебаний. Струнная система помещена в вакуумную камеру, причем груз находится в сосуде с демпферной жидкостью с кинематической вязкостью порядка 106 сСт (Лозинская А.М. Измерение силы тяжести на борту самолета. Обзор. Регион. разв. и промысловая геофизика. М. ВИЭМС, 1978, с. 3-11, рис. 10). Выходные сигналы гравиметра снимаются с индуктивного датчика в цифровой форме.
В качестве радиовысотомера 7 использован радиолокатор сантиметрового диапазона, содержащий антенную систему, передатчик, приемник, синхронизатор и устройство первичной обработки сигналов. Он предназначен для высокоточного измерения высоты полета ЛА над морской поверхностью. Радиолокатор работает на длине волны зондирующего сигнала 2,2 см и обеспечивает точность измерения высоты при волнении воды до 2 баллов не более 0,1 м, а при волнении свыше 7 баллов не более 0,5 м. Информационные сигналы, пропорциональные измеренной высоте, выдаются в цифровой форме (см. "Океанографический прецизионный радиовысотомер (ПРВО) самолетного базирования". Особое конструкторское бюро Московского Энергетического Института, М. 1995, рекламный проспект Международной выставки "Мосаэрошоу-95").
В качестве барометрического измерителя вертикальной скорости (БИВС) 10 может быть использован известный струнный измеритель вертикальной скорости, содержащий две одинаково чувствительные барометрические коробки, укрепленные на общей раме, между которыми натянута помещенная между полюсами постоянного магнита вибрационная струна. Струнная система находится внутри герметичной камеры, которая сообщается с внешней средой через капилляр. Внутренние объемы барометрических коробок свободно сообщаются с внешней средой через относительно широкие трубки.
Принцип действия прибора основан на линейной зависимости скорости потока в капилляре от перепада давления на его концах. При подъеме на высоту (или спуске) разность между внешним давлением и давлением внутри герметичной камеры будет тем больше, чем больше скорость подъема (спуска). Измеряя разность давлений, определяют вертикальную скорость (см. Лозинская А.М. Измерения силы тяжести на борту самолета. Обзор. Регион. разв. и промысл. геофизика. М. ВИЭМС, 1978, с. 12, 15-17, рис. 5 и 6). Выходные сигналы снимаются с индуктивного датчика в цифровой форме.
В качестве бортового приемо-индикатора спутниковой навигационной системы (БПИ СНС) 11 может быть использован приемо-индикатор GPS, содержащий антенну, радиоприемник с дисплеем, вычислитель (см. например, "Радиоэлектроника в 1976 г." Обзор. НИИ экономики и информации по радиоэлектронике. М. 1977, с. 11.7-11.11; Волков П. С. и др. Судовые комплекты спутниковой навигации. М. Судостроение, 1983).
В качестве накопителя информации (НИ) 16 предпочтительно использование накопителя на магнито-оптических дисках (МО-накопитель).
Наземное оборудование аэрогравиметрического комплекса включает в свой состав подключенные к входам наземного вычислителя (НВ) 17 наземный (донный) гравиметр (Н(Д)ГМ) 18, первый приемо-индикатор спутниковой навигационной системы (1ПИ СНС) 19, второй приемо-индикатор спутниковой навигационной системы (2ПИ СНС) 20, стример (С)21. К выходу НВ 17 подключено регистрирующее устройства (РУ)22.
В качестве наземного гравиметра 18 может быть использован известный гравиметр типа ГАГ-2 (см. например, Юзефович А.П. Огородова Л.В. Гравиметрия. М. Недра, 1980, с. 127-134, рис. 52, 53). Наземный гравиметр 18 предназначен для измерения величины ускорения силы тяжести на опорном пункте. Если опорный пункт находится на шельфе, то гравиметр 18 устанавливают на дне акватории. В качестве донного гравиметра может быть использован известный гравиметр типа ГМТД-2 (см. там же, с. 139-144, рис. 65).
Первый (1ПИ СНС) 19 и второй (2ПИ СНС) 20 приемо0индикаторы спутниковой навигационной системы идентичны бортовому приемо-индикатору спутниковой навигационной системы (БПИ СНС) 11. 1ПИ СНС 19 устанавливают в геодезическом пункте, 2ПИ СНС 20 в опорном пункте. При этом работа БПИ СНС 11 и 2ПИ СНС 20 синхронизирована во времени.
Стример (С) 21 представляет собой устройство хранения и выдачи информации о величинах притяжения промежуточного слоя земли между уровнем моря и поверхностью суши вдоль съемочных галсов. В качестве носителя информации предпочтительно использование компакт-дисков типа CD-ROM.
Регистрирующее устройство (РУ) 22 содержит блок записи и чтения информации на компакт-дисках CDR-ROM, дисплей, печатающее устройство (принтер).
Астроинерциальная система 1 бортового оборудования смонтирована в контейнере 23 (фиг. 2), на внешней поверхности которого имеются узлы крепления 24 элементов амортизатора низкочастотных инерционных ускорений (АНИУ) 15. Верхняя крышка 25 контейнера 23 выполнена из светопрозрачного материала, например, стекла, для обеспечения нормального функционирования телескопа астроориентатора 2, установленного на гиростабилизированной платформе 26 инерциальной навигационной системы 3 (на схеме не показано).
Амортизатор низкочастотных инерционных ускорений 15 выполнен в виде идентичных по своим механическим и кинематическим характеристикам связок, каждая из которых состоит из ортогонально расположенных упругого элемента 27 (например, металлическая спиральная пружина) и трех демпфирующих элементов 28 (например, воздушных или гидравлических). Упругий элемент 27 расположен вертикально, и его верхний конец жестко прикреплен к конструкции ЛА, а нижний конец соединен шарнирно с узлом крепления 24 на контейнере 23. С этим узлом шарнирно связаны одни концы демпфирующих элементов 28, другие их концы соединены при помощи шарниров 29 с конструкцией ЛА. Узлы крепления 24 элементов амортизатора расположены в горизонтальной плоскости, которая проходит через центр масс контейнера со всем его содержимым, и симметрично вертикальной оси, также проходящей через центр масс.
Таким образом, внешняя рама карданового подвеса инерциальной навигационной системы 3 опирается на корпус ЛА не непосредственно, как это обычно имеет место, а связана с ним через амортизатор 15, собственная резонансная частота колебаний которого не превышает 3 Гц.
Бортовые струнные гравиметры 4, 5, 6 благодаря конструктивному демпфированию грузов малочувствительны к тряске и ударам, но чувствительны к низкочастотным инерционным ускорениям и аэроупругим колебаниям конструкции ЛА в диапазоне 3-20 Гц. Размещение этих гравиметров на гиростабилизированной платформе 26 ИНС 3, которая в свою очередь подвешена на амортизаторе низкочастотных ускорений 15, в значительной мере повышает точность измерения силы тяжести на борту ЛА, так как амортизатор 15 обеспечивает стабилизацию пространственного положения гиростабилизированной платформы при аэроупругих колебаниях конструкции ЛА, а также колебаниях, вызванных действием инерционных ускорений.
Принцип действия описанного аэрогравиметрического комплекса заключается в следующем.
Параметры траектории полета ЛА 14 измеряются группой датчиков разной физической структуры (астроинерциальная система 1, радио- 7, баро- 9 и лазерный 8 высотомеры, барометрический измеритель вертикальной скорости 10, приемо-индикатор спутниковой навигационной системы 11) и поступают в бортовой вычислитель 12. С учетом содержащихся в памяти вычислителя моделей ошибок измерений сигналы подвергаются оптимальной фильтрации и формируется алгоритм для управления автопилотом 13 по курсу, высоте и вертикальной скорости. По показаниям гравиметров 4, 5 и 6 и параметрам, связанным с ускорением траекторного движения ЛА горизонтальные координаты v,λ, истинный курс j, высота Н, вертикальная скорость  определяется полное вертикальное ускорение. Решая систему линейных уравнений, связывающих эти параметры с вертикальным и горизонтальным ускорениями, из полного вертикального ускорения выделяются требуемые величины аномалии ускорения силы тяжести в свободном воздухе. Измеряется высота hp рельефа подстилающей поверхности вдоль съемочного галса. Все эти данные вводятся в накопитель информации 16.
определяется полное вертикальное ускорение. Решая систему линейных уравнений, связывающих эти параметры с вертикальным и горизонтальным ускорениями, из полного вертикального ускорения выделяются требуемые величины аномалии ускорения силы тяжести в свободном воздухе. Измеряется высота hp рельефа подстилающей поверхности вдоль съемочного галса. Все эти данные вводятся в накопитель информации 16.
Кроме упомянутых выше алгоритмов в бортовом вычислителе 12 информация от датчиков форматируется, синхронизируется, и в результате формируется выходной файл для постобработки в наземном вычислителе 17.
Постобработка сигналов в НВ 17 включает в себя алгоритмы фазодифференциального режима спутниковой навигационной системы (БПИ СНС 11 и 2ПИ СНС 20), оптимальную фильтрацию шумов измерителей, пересчет показаний наземного (донного) гравиметра 18, редукцию Буге с учетом высоты hp подстилающей поверхности и величин притяжения промежуточного слоя земли между уровнем моря и поверхностью суши вдоль съемочных галсов. На выходе НВ 17 формируется цифровой файл, который поступает в регистрирующее устройство 22 для получения визуального изображения изоаномал на дисплее и бумажном носителе с помощью принтера.
На первом (предварительном) этапе работы аэрогравиметрического комплекса осуществляется уточнение проектного и/или полетного задания на выполнение аэрогравиметрической съемки в заданном районе картографирования. При этом в бортовой вычислитель (В) 12 (фиг. 1), автопилот (АП) 13, астроинерциальную систему (АИС) 1, радиовысотомер (РВ) 7, лазерный высотомер ЛВ) 8, барометрический высотомер (БВ) 9, барометрический измеритель вертикальной скорости (БИВС) 10 и бортовой приемо-индикатор спутниковой навигационной системы (БПИ СНС) 11 вводятся соответствующие стартовые геодезические и гравиинерционные данные, а в астроориентатор (АО) 2 астрономические данные в виде эфемерид опорных небесных светил и их астрономических азимутов на время старта ЛА.
Кроме стартовых исходных астрономо-геодезических данных в В 12 и наземный вычислитель (НВ) 17 вводятся результаты эталонирования бортовых гравиметров 4, 5 и 6, наземного (донного) гравиметра 18, результаты юстировок постоянных и масштабирующих коэффициентов бортового 11 и наземных 19, 20 приемо-индикаторов спутниковой навигационной системы, результаты калибровок масштабирующих коэффициентов высотомеров 7, 8, 9 и БИВС 10. В бортовой 12 и наземный 17 вычислители также вводится предварительно спроектированная схема съемочных галсов в заданном районе картографирования в виде соответствующих курсов прямолинейных маршрутов, геодезических координат начала и конца каждого съемочного галса, заданной высоты и скорости полета ЛА. С учетом метеоусловий в районе съемки, например бальности порывов ветра, производят соответствующую регулировку демпфирующих элементов 28 амортизатора низкочастотных инерционных ускорения (АНИУ) 15.
Непосредственно перед взлетом ЛА выполняются наземные гравиметрические измерения бортовыми гравиметрами 4, 5 и 6 при работающей астроинерциальной системе (АИС) 1 на опорном гравиметрическом пункте, расположенном вблизи стоянки ЛА и/или рядом с наземным (донным) гравиметром 18. Результаты наземных стартовых измерений гравиметрами 18, 4, 5 и 6 вводятся в бортовой 12 и наземный 17 вычислители.
На втором (основном) этапе работы аэрогравиметрического комплекса в воздухе осуществляются измерения силы тяжести бортовыми гравиметрами 4, 5 и 6. Главным условием обеспечения заданной точности измерений является выдерживание летательным аппаратом заданных курса и высоты полета с помощью автопилота 13.
Выдерживание ЛА заданного курса осуществляется путем астрокоррекции инерциальной навигационной системы (ИНС) 3 (фиг. 3). При этом в бортовой вычислитель (В) 12, в память которого заложены модель ошибок ИНС 3 и структура оптимального фильтра, поступают сигналы от ИНС 3, пропорциональные курсу ЛА ψинс, и сигналы коррекции (вектор  ) курса от астроориентатора (АО)2 согласно предварительно введенной в него проектной схемы съемочных галсов. В результате оптимальной обработки на выходе В 12 формируется управляющий сигнал, пропорциональный откорректированному курсу
) курса от астроориентатора (АО)2 согласно предварительно введенной в него проектной схемы съемочных галсов. В результате оптимальной обработки на выходе В 12 формируется управляющий сигнал, пропорциональный откорректированному курсу  , который подается на вход автопилота 13 ЛА. Таким образом осуществляется высокоточное пилотирование ЛА по курсу с погрешностью порядка 1 угловой минуты, что в несколько раз лучше, чем в прототипе. Это обеспечивает уменьшение ошибок измерений бортовых гравиметров 4, 5 и 6 за влияние угловых скоростей и угловых ускорений, обусловленных влиянием остаточных погрешностей работы астроинерциальной системы, и соответствующее (в 2-3 раза) уменьшение ошибок за влияние остаточных кориолисовых ускорений и/или эффекта Этвеша (на уровне 0,3-0,5 мГал).
, который подается на вход автопилота 13 ЛА. Таким образом осуществляется высокоточное пилотирование ЛА по курсу с погрешностью порядка 1 угловой минуты, что в несколько раз лучше, чем в прототипе. Это обеспечивает уменьшение ошибок измерений бортовых гравиметров 4, 5 и 6 за влияние угловых скоростей и угловых ускорений, обусловленных влиянием остаточных погрешностей работы астроинерциальной системы, и соответствующее (в 2-3 раза) уменьшение ошибок за влияние остаточных кориолисовых ускорений и/или эффекта Этвеша (на уровне 0,3-0,5 мГал).
Для стабилизации горизонтального полета ЛА на заданной высоте используется алгоритм определения высоты Н, вертикальной скорости  и горизонтального ускорения Wгор и формирования соответствующих управляющих сигналов для автопилота 13. При этом (фиг. 4) сигналы, поступающие в бортовой вычислитель (В) 12 от радио- 7, баро- 8 и лазерного 9 высотомеров, барометрического измерителя вертикальной скорости (БИВС) 10, бортового приемо-индикатора спутниковой навигационной системы (БПИ СНС) 11 (
и горизонтального ускорения Wгор и формирования соответствующих управляющих сигналов для автопилота 13. При этом (фиг. 4) сигналы, поступающие в бортовой вычислитель (В) 12 от радио- 7, баро- 8 и лазерного 9 высотомеров, барометрического измерителя вертикальной скорости (БИВС) 10, бортового приемо-индикатора спутниковой навигационной системы (БПИ СНС) 11 ( вектор выходных сигналов указанных датчиков), а также астроинерциальной системы (АИС) 1 (
вектор выходных сигналов указанных датчиков), а также астроинерциальной системы (АИС) 1 ( вектор выходных сигналов АИС), подвергаются оптимальной обработке в В 12 с учетом моделей ошибок измерителей, в результате которой на выходе В 12 формируются сигналы управления АП 13 по высоте
вектор выходных сигналов АИС), подвергаются оптимальной обработке в В 12 с учетом моделей ошибок измерителей, в результате которой на выходе В 12 формируются сигналы управления АП 13 по высоте  и вертикальной скорости
и вертикальной скорости  . БПИ СНС 11 работает также в фазодифференциальном режиме со вторым приемо-индикатором спутниковой навигационной системы (2ПИ СНС)20 (фиг. 1), установленным в опорном пункте и/или рядом с наземным (донным) гравиметром (Н(Д)ГМ) 18. Это обеспечивает высокоточное измерение пространственных координат местоположения ЛА и величин изменений вертикальной скорости. При этом осуществляется многомерный контроль по инерциальным и неинерциальным измерителям высоты фактического полета ЛА и точности работы его автопилота, что позволяет с учетом работы амортизатора низкочастотных инерционных ускорений (АНИУ) 15, собственная резонансная частота которого не превышает 3 Гц, существенно уменьшить (в 2-3 раза) остаточные погрешности измерений бортовых гравиметров 4, 5 и 6, обусловленные флуктуациями стабилизированной высоты полета ЛА, его вертикальными скоростями и ускорениями, а также воздействиями виброакустических и аэроупругих колебаний конструкции ЛА. Суммарные остаточные влияния на погрешность бортовых гравиметров 4, 5 и 6, обусловленные вышеуказанными причинами, не превышают 0,3-0,5 мГал.
. БПИ СНС 11 работает также в фазодифференциальном режиме со вторым приемо-индикатором спутниковой навигационной системы (2ПИ СНС)20 (фиг. 1), установленным в опорном пункте и/или рядом с наземным (донным) гравиметром (Н(Д)ГМ) 18. Это обеспечивает высокоточное измерение пространственных координат местоположения ЛА и величин изменений вертикальной скорости. При этом осуществляется многомерный контроль по инерциальным и неинерциальным измерителям высоты фактического полета ЛА и точности работы его автопилота, что позволяет с учетом работы амортизатора низкочастотных инерционных ускорений (АНИУ) 15, собственная резонансная частота которого не превышает 3 Гц, существенно уменьшить (в 2-3 раза) остаточные погрешности измерений бортовых гравиметров 4, 5 и 6, обусловленные флуктуациями стабилизированной высоты полета ЛА, его вертикальными скоростями и ускорениями, а также воздействиями виброакустических и аэроупругих колебаний конструкции ЛА. Суммарные остаточные влияния на погрешность бортовых гравиметров 4, 5 и 6, обусловленные вышеуказанными причинами, не превышают 0,3-0,5 мГал.
Представленная на фиг. 4 совокупность датчиков первичной информации, оптимальные алгоритмы обработки их сигналов с учетом моделей ошибок позволяют получить в бортовом 12 и наземном 17 вычислителях оптимальные оценки фактической высоты прямолинейного полета ЛА во время съемочного галса, а также получить оценку высоты  рельефа подстилающей поверхности для ее последующего использования при вычислениях поправок (редукции) Буге в НВ 17. В прототипе операция уточнения высоты рельефа отсутствует. В заявленном аэрогравиметрическом комплексе эта задача решается помощью радио- 7, баро 8, лазерного 9 высотомеров и бортового приемо-индикатора спутниковой навигационной системы (БПИ СНС) 11 с точностью, необходимой для продуцирования карт гравитационных аномалий в масштабе 1:200000 и крупнее.
рельефа подстилающей поверхности для ее последующего использования при вычислениях поправок (редукции) Буге в НВ 17. В прототипе операция уточнения высоты рельефа отсутствует. В заявленном аэрогравиметрическом комплексе эта задача решается помощью радио- 7, баро 8, лазерного 9 высотомеров и бортового приемо-индикатора спутниковой навигационной системы (БПИ СНС) 11 с точностью, необходимой для продуцирования карт гравитационных аномалий в масштабе 1:200000 и крупнее.
При съемке гравитационных аномалий необходимо иметь "опорную точку" с известными геодезическими координатами и в которой известно абсолютное значение ускорения силы тяжести. Эта задача решается следующим образом (фиг. 5). Первый наземный приемо-индикатор спутниковой навигационной системы (1ПИ СНС) 19 устанавливают в геодезическом пункте, а 2ПИ СНС 20 устанавливают в опорном пункте, где также установлен наземный 18 (или донный 18, если опорный пункт находится на шельфе) гравиметр. Предварительно нулевые отсчеты Н(Д)ГМ 18 берутся в геодезическом пункте, а затем он переносится в опорный пункт. Необходимая геодезическая коррекция в опорном пункте осуществляется НВ 17 по показаниям первого 19 ( ) и второго 20 (
) и второго 20 ( ) ПИ СНС, работающих в фазодифференциальном режиме. Таким образом, отсчеты Н(Д)ГМ 18 корректируются с учетом геодезической коррекции, что обеспечивает получение на выходе НВ 17 исходных геодезических
) ПИ СНС, работающих в фазодифференциальном режиме. Таким образом, отсчеты Н(Д)ГМ 18 корректируются с учетом геодезической коррекции, что обеспечивает получение на выходе НВ 17 исходных геодезических  и гравиметрических G данных для выполнения аэрогравиметрических работ. При этом отпадает необходимость в дорогостоящей и трудоемкой работе по предварительному созданию сети опорных гравиметрических пунктов в заданном районе съемок, что по сравнению с прототипом существенно повышает производительность аэрогравиметрического комплекса.
и гравиметрических G данных для выполнения аэрогравиметрических работ. При этом отпадает необходимость в дорогостоящей и трудоемкой работе по предварительному созданию сети опорных гравиметрических пунктов в заданном районе съемок, что по сравнению с прототипом существенно повышает производительность аэрогравиметрического комплекса.
Второй (основной этап работы аэрогравиметрического комплекса завершается процедурой контрольной проверки работы бортовых гравиметров 4, 5 и 6 на работающем амортизированном гиростабилизаторе астроинерциальной системы 1 на земле в ЛА, который после приземления устанавливают вблизи опорного пункта и/или Н(Д)ГМ 18, совмещенного с 2ПИ СНС 20.
Третий (заключительный) этап работы аэрогравиметрического комплекса включает введение в наземный вычислитель 17 данных из бортового накопителя информации 16 и осуществление традиционной процедуры гравиметрических измерений (см. например, Юзефович А.П. Огородова Л.В. Гравиметрия М. Недра, 1980, с. 229-234, рис. 126). При этом в НВ 17 по разработанному заявителем алгоритму с учетом высоты рельефа подстилающей поверхности hp и величин притяжения промежуточного слоя земли между уровнем моря и поверхностью суши, вводимых из стримера 21, определяются значения гравитационных аномалий непосредственно в редукции Буге, которые фиксируются регистрирующим устройством 22 и воспроизводятся в виде карты изоаномал гравитационного поля в редукции Буге.
Приведенные сведения подтверждают, что средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в гравиметрии, а именно для измерения аномалий силы тяжести в редукции Буге с масштабом картографирования 1:200000 и крупнее с целью поиска полезных ископаемых. Для изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке или известных до даты приоритета изобретения средств и методов. Средства, воплощающие заявленное изобретение, способны обеспечить получение указанного в заявке технического результата. Следовательно, изобретение соответствует условию патентоспособности "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) | 2018 |
|
RU2697474C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОСИ ЧУВСТВИТЕЛЬНОСТИ ГРАВИМЕТРА, УСТАНОВЛЕННОГО НА ЛЕТАТЕЛЬНОМ АППАРАТЕ, ПРИ ЕГО ДИСТАНЦИОННОЙ ВЫСТАВКЕ ПО ЛИНИИ ОТВЕСА | 2001 |
|
RU2221990C2 |
| СПОСОБ МОНИТОРИНГА ВЫДЕРЖИВАНИЯ ВЫСОТЫ ЭШЕЛОНА ПОЛЕТА | 2008 |
|
RU2390793C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |


Использование: аэрогравиметрический комплекс предназначен для изучения гравитационного поля, в частности для картографирования гравитационных аномалий Земли. Сущность изобретения: устройство включает бортовое и наземное оборудование. Бортовое оборудование содержит подключенные к вычислителю с накопителем информации автопилот, астроинерциальную навигационную систему, приемо-индикатор спутниковой навигационной системы, три гравиметра, радио-, баро- и лазерный высотомеры, барометрический измеритель вертикальной скорости. Астроинерциальная система образована путем установки на гироплатформе инерциальной навигационной системы астроориентатора, выход которого соединен с вычислителем. На этой же гироплатформе установлены бортовые гравиметры. Астроинерциальная система смонтирована в контейнере, который снабжен амортизатором низкочастотных инерционных ускорений. Наземное оборудование содержит подключенные к вычислителю наземный или донный гравиметр, приемоиндикатор спутниковой навигационной системы, установленный в геодезическом пункте, и приемо-индикатор спутниковой навигационной системы, установленный в опорном пункте, стример, регистрирующее устройство. 3 з.п. ф-лы, 5 ил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1053047, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 4435981, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
