Уровень техники
Настоящее изобретение относится к ультразвуковым устройствам и, в частности, к устройствам для управления офтальмологическим факоэмульсификационным наконечником.
Обычное ультразвуковое хирургическое устройство, пригодное для офтальмологических процедур, состоит из наконечника с ультразвуковым приводом, прикрепленного полого режущего кончика, ирригирующей втулки и электронной консоли управления. Узел наконечника прикреплен к консоли управления при помощи электрического кабеля и гибких трубопроводов. При помощи электрического кабеля консоль изменяет уровень мощности, передаваемый наконечником на прикрепленный режущий кончик, и гибкие трубопроводы подают жидкость ирригации в глаз и вытягивают жидкость аспирации из него при помощи узла наконечника.
Рабочий орган наконечника представляет собой центрально расположенный полый резонирующий стержень или рупор, непосредственно прикрепленный к набору пьезоэлектрических кристаллов. Кристаллы подают требуемые ультразвуковые колебания, необходимые для приведения в движение как рупора, так и прикрепленного режущего кончика во время факоэмульсификации, и управляются консолью. Узел кристалла/рупора подвешен в полом корпусе или кожухе наконечника в его узловых точках посредством относительно негибких креплений. Корпус наконечника оканчивается частью с уменьшенным диаметром или передней конусообразной деталью на периферическом конце корпуса. Передняя конусообразная деталь имеет внешнюю резьбу для установки втулки ирригации. Аналогично, канал рупора имеет внутреннюю резьбу на своем периферическом конце для установки внешней резьбы режущего кончика. Втулка ирригации также имеет канал с внутренней резьбой, который наворачивается на внешнюю резьбу передней конусообразной детали. Режущий кончик регулируется, так что кончик выступает только на предварительно определенную величину из открытого конца ирригирующей втулки. Ультразвуковые наконечники и режущие кончики более подробно описаны в патентах США №№3589363; 4223676; 4246902; 4493694; 4515583; 4589415; 4609368; 4869715 и 4922902, содержание которых полностью включено в настоящий документ путем ссылки.
При использовании для выполнения факоэмульсификации концы режущего кончика и ирригирующей втулки вставляются в небольшой надрез предварительно определенной ширины в роговице, склере или в другом расположении в ткани глаза, чтобы получить доступ к передней камере глаза. Режущий кончик колеблется ультразвуком по его продольной оси в пределах ирригирующей втулки при помощи управляемого кристаллом ультразвукового рупора, таким образом, выполняя эмульсификацию при соприкосновении с выбранной тканью в соответствующем положении. Полый канал режущего кончика сопрягается с каналом в рупоре, который, в свою очередь, сопрягается с линией аспирации от наконечника к консоли. Источник пониженного давления или разрежения в консоли вытягивает или аспирирует эмульсифицированную ткань из глаза через открытый конец режущего кончика, канал режущего кончика, канал рупора и линию аспирации и в сборное устройство. Аспирации эмульсифицированной ткани способствует физиологический раствор для промывания или промывочный раствор, который вводится в участок хирургического вмешательства через небольшой кольцевой зазор между внутренней поверхностью ирригирующей втулки и внешней поверхностью режущего кончика. Промывочный раствор также поддерживает жидкостный баланс в глазу и способствует сохранению глазом своей формы.
Предпринимались известные попытки объединить ультразвуковое продольное движение режущего кончика с вращательным движением кончика, см. патенты США №№5222959 (Anis), 5722945 (Anis, et al) и 4504264 (Kelman), содержание которых полностью включено в данный документ путем ссылки. Эти известные ссылки использовали электрические двигатели для обеспечения вращения кончика, которые требовали уплотнительного кольца или других уплотнений, которые могли выйти из строя в дополнение к добавочной сложности и возможного выхода из строя двигателей.
Также были предложены известные попытки создания как продольного, так и крутящего движения без использования электрических двигателей. Например, в патентах США №№6028387, 6077285 и 6402769 (Boukhny) описывается наконечник, имеющий две пары пьезоэлектрических кристаллов. Одна пара поляризуется для получения продольного движения. Другая пара поляризуется для получения крутящего движения. Два отдельных приводных сигнала используются для привода двух пар кристаллов. Фактически на практике трудно изготовить наконечник, используя две пары кристаллов, которые резонируют как в продольном, так и крутящем направлении. Одно возможное решение описывается в публикации патента США № US 2001/0011176 А1 (Boukhny). Эта ссылка описывает, что наконечник имеет отдельный набор пьезоэлектрических кристаллов, которые создают продольное движение, и группу диагональных прорезей на рупоре или кончике наконечника, которые создают крутящее движение, когда рупор или кончик приводится в движение на резонансной частоте пьезоэлектрических кристаллов. Снова, на практике, резонансная частота пьезоэлектрических кристаллов и кончика или рупора не совпадают, поэтому было трудно достичь одновременно продольного и крутящего движения.
Следовательно, продолжает существовать потребность в надежном ультразвуковом наконечнике, который выполняет колебания как в продольном, так и крутящем направлении, как одновременно, так и по отдельности.
Краткая сущность изобретения
Настоящее изобретение улучшает способы работы ультразвукового наконечника известного уровня техники посредством обеспечения наконечника, имеющего по меньшей мере один набор пьезоэлектрических элементов, поляризованных для получения продольного движения при возбуждении на соответствующей резонансной частоте. Пьезоэлектрические кристаллы подсоединены к ультразвуковому рупору, к которому прикреплен режущий кончик. Рупор и/или режущий кончик содержит множество диагональных прорезей или канавок. Прорези или канавки создают оптимизированное крутящее движение режущего кончика, когда пьезоэлектрические кристаллы возбуждаются на второй резонансной частоте. В крутящем режиме вещество может закупоривать режущий кончик. Настоящий способ включает в себя этап обеспечения импульса продольного движения кончика, когда обнаруживается закупоривание.
Следовательно, задачей настоящего изобретения является обеспечение ультразвукового наконечника, имеющего как продольное, так и крутящее движение.
Другой задачей настоящего изобретения является обеспечение ультразвукового наконечника с рупором, имеющим ряд диагональных прорезей для получения крутящего движения.
Другие задачи, признаки и преимущества настоящего изобретения станут очевидны со ссылкой на чертежи и последующее описание чертежей и формулы изобретения.
Краткое описание чертежей
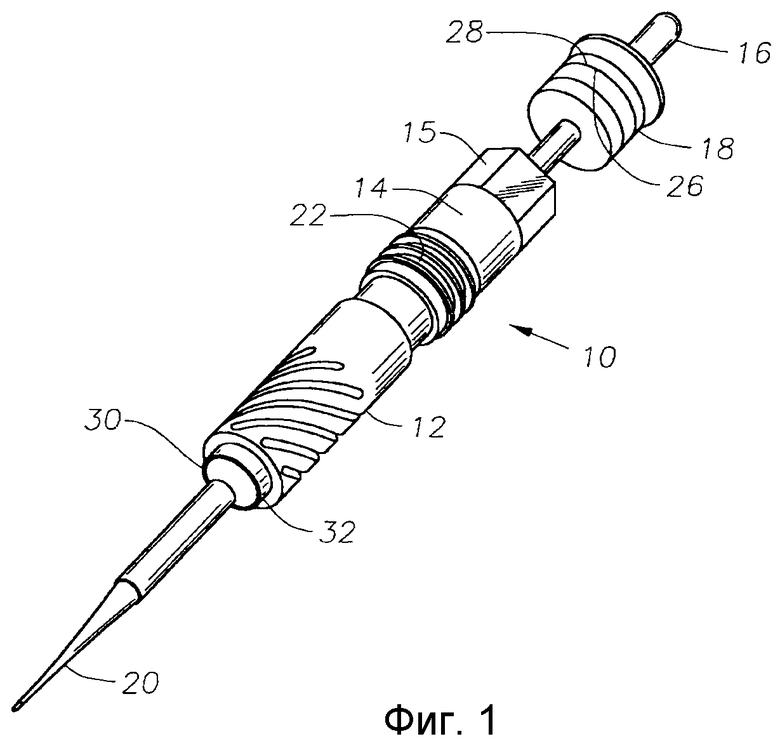
Фиг.1 представляет собой вид в перспективе наконечника, который может использоваться в способе согласно настоящему изобретению, со снятым внешним кожухом.
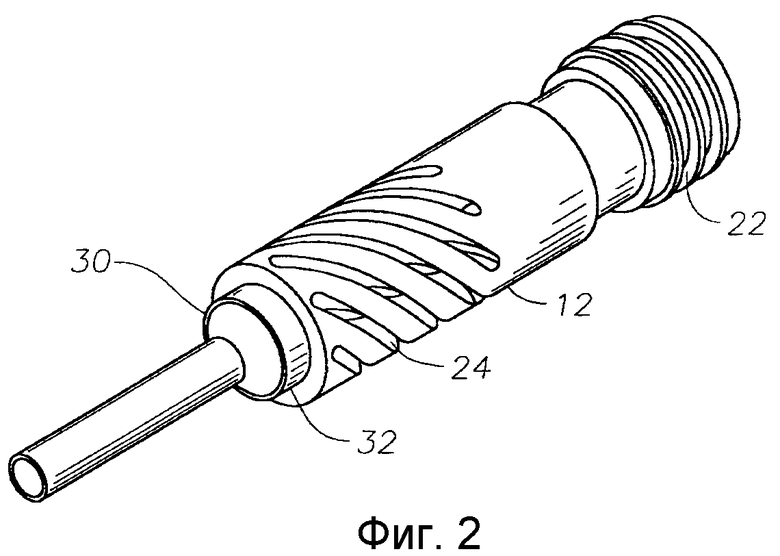
Фиг.2 представляет собой вид в перспективе ультразвукового рупора, который может использоваться в способе настоящего изобретения.
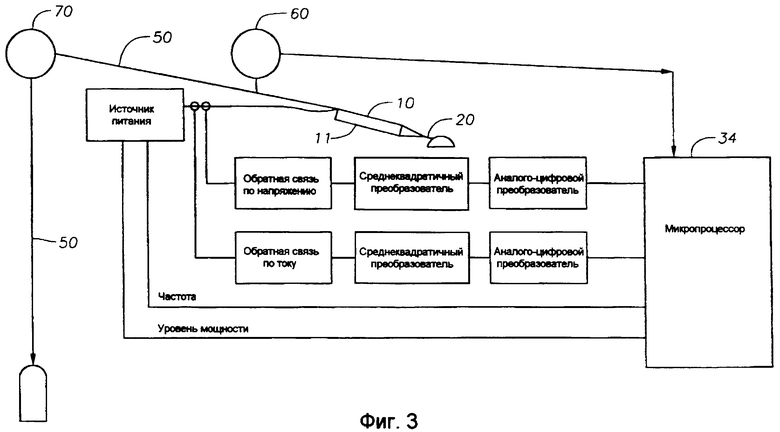
Фиг.3 представляет собой блок-схему схемы привода, которая может использоваться в настоящем изобретении.
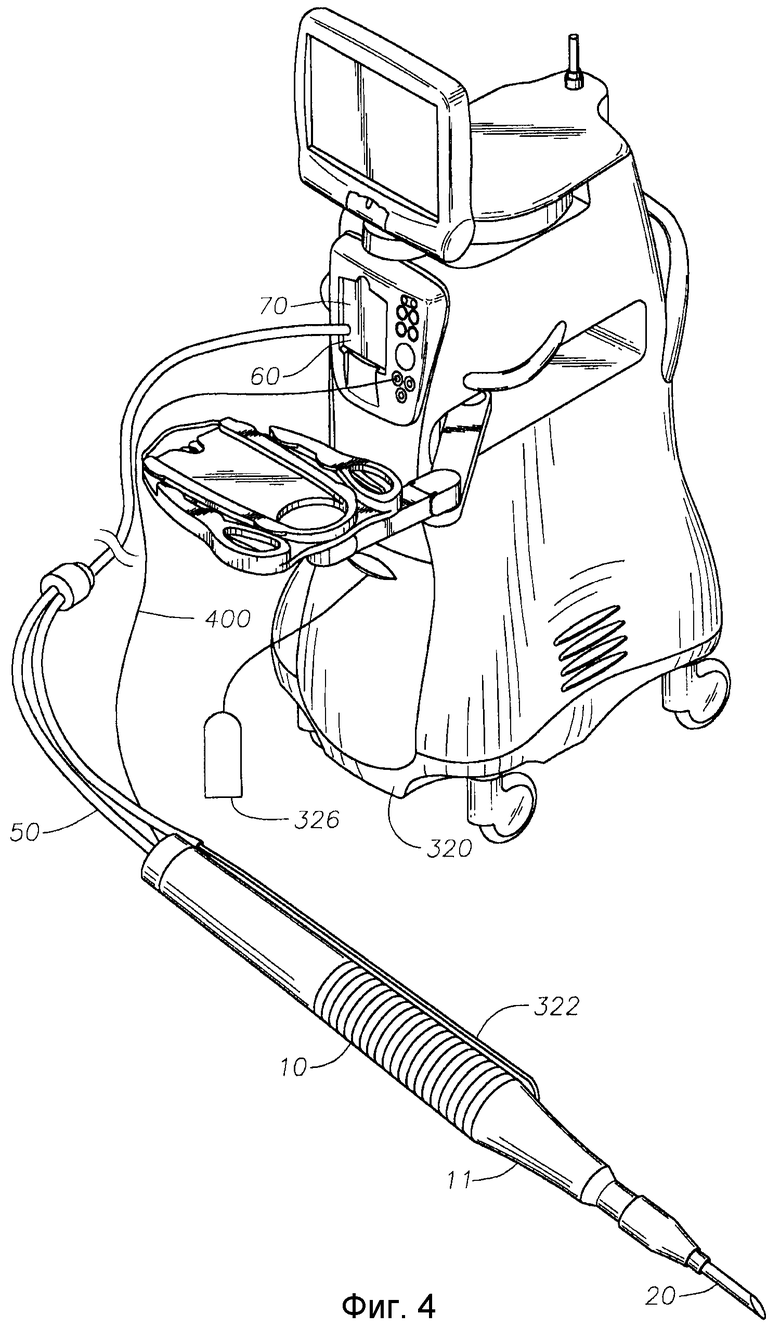
Фиг.4 представляет собой вид в перспективе наконечника и консоли управления, которые могут использоваться в настоящем изобретении.
Подробное описание изобретения
Как лучше всего видно на фиг.4, хирургическая консоль 320, пригодная для использования в настоящем изобретении, может представлять собой любую имеющуюся в продаже хирургическую консоль управления, такую как хирургические системы INFINITI®, имеющиеся в наличии у компании Alcon Laboratories, Inc., г.Форт-Уэрт, шт.Техас, США. Консоль 320 соединена с наконечником 10 при помощи линии 322 ирригации и линии 50 аспирации, и поток через линии 322 и 50 управляется пользователем, например, при помощи ножного выключателя 326. Питание подается на наконечник по электрическому кабелю 400.
Как лучше всего видно на фиг.1, наконечник 10 настоящего изобретения, в основном, содержит ультразвуковой рупор 12, обычно выполненный из титанового сплава. Рупор 12 имеет множество спиральных прорезей, которые описаны ниже. Множество (обычно 1 или 2 пары) кольцеобразных пьезоэлектрических элементов 14 удерживаются стяжной гайкой 15 у рупора 12. Стержень 16 аспирации проходит по длине наконечника 10 через рупор 12, пьезоэлектрические элементы 14, гайку 15 и через пробку 18 на периферическом конце наконечника 10. Трубка 16 аспирации позволяет аспирировать вещество через полый кончик 20, который прикреплен к рупору 12, и через наконечник 10 и из него. Пробка 18 уплотняет внешний кожух 11 наконечника 10 непроницаемо для жидкости, позволяя стерилизовать наконечник 10 в автоклаве без вредного воздействия на пьезоэлектрические элементы 14. Дополнительные канавки 22 для уплотнительных кольцевых прокладок (не показаны) предусмотрены на рупоре 12.
Как лучше всего видно на фиг.2, рупор 12 содержит множество спиральных прорезей 24. Предпочтительно, ширина прорезей 24 составляет 2-65% от внешнего диаметра рупора 12. Это, конечно, оказывает влияние на то, сколько прорезей 24 может быть сделано на рупоре 12 (например, если прорези 24 составляют 65% от диаметра рупора 12, тогда только одна прорезь 24 может быть прорезана в рупоре 12). Ширина выбранных прорезей 24 будет зависеть от требуемой величины крутящего движения. Глубина прорезей 24 в рупоре 12, предпочтительно, составляет 4-45% от внешнего диаметра рупора 12. Прорези 24 могут иметь плоское или квадратное вырезанное дно, но предпочтительно имеют закругленное или сферическое дно, которое легче в производстве. Длина прорезей 24 составляет, предпочтительно, 8-75% от длины большего диаметра рупора 12. Шаг прорезей 24 составляет, предпочтительно, 125-500% от большего диаметра рупора 12. В качестве примера, изобретатели обнаружили, что одна подходящая конфигурация с прорезями 24 на рупоре 12 с внешним диаметром 0,475 дюймов с общим количеством в восемь прорезей 24, имеющих ширину 0,04 дюйма, глубину 0,140 (с полностью скругленным дном), длину 0,7 дюйма и шаг 1,35 дюйма, дает подходящее крутящее движение рупора 12 без компромисса с продольным движением рупора 12.
Как лучше всего видно на фиг.1, расположение продольных и крутящих узловых точек (точек с нулевой скоростью соответствующего режима) является важным для правильного функционирования наконечника 10. Крутящая узловая точка 26, предпочтительно, располагается в проксимальной продольной узловой точке 28, так что крутящая узловая точка 26 и продольная узловая точка 28 совпадают, например обе они располагаются на пробке 18. Наконечник 10 также содержит периферическую продольную узловую точку 30, расположенную на части 32 с уменьшенным диаметром рупора 12.
Как лучше всего видно на фиг.3, схема 34 привода, которая может использоваться с наконечником 10 настоящего изобретения, предпочтительно подобна описанной в патенте США №5431664, содержание которого полностью включено в данный документ путем ссылки, в том, что схема 34 привода отслеживает подвод наконечника 10 и управляет частотой наконечника 10, чтобы поддерживать постоянный подвод. Однако схема 34 привода контролирует как крутящий режим, так и продольный режим и управляет этими режимами в наконечнике 10, используя две различные частоты привода. Предпочтительно, крутящий приводной сигнал составляет примерно 32 кГц, и продольный приводной сигнал составляет 44 кГц, но эти частоты изменяются в зависимости от используемых пьезоэлектрических элементов 14 и размера и формы рупора 12 и прорезей 24. Хотя как продольный приводной сигнал, так и крутящий приводной сигнал может подаваться непрерывным образом, предпочтительно, чтобы продольный приводной сигнал и крутящий приводной сигнал чередовались, так что приводной сигнал обеспечивается в требуемом импульсном режиме на одной частоте и затем переключается на другую частоту для подобного импульсного режима, без перекрытия между двумя частотами, но без пропуска или паузы в приводном сигнале. Альтернативно, приводной сигнал может работать аналогичным образом, как описано, но могут быть введены короткие паузы или пропуски в приводном сигнале. Кроме того, амплитуда приводного сигнала может модулироваться и устанавливаться независимо для каждой частоты.
Пауза или пропуск между приводными сигналами могут служить различным целям. Одной целью является то, чтобы дать возможность ультразвуковому движению пьезоэлектрических элементов 14 и рупора 12 замеряться или останавливаться, так чтобы фрагменты хрусталика глаза могли еще раз отсасываться в кончик 20 и могла восстанавливаться окклюзия, таким образом увеличивая задерживающую силу на фрагменты хрусталика глаза. Восстановление окклюзии повышает эффективность резания следующего импульса ультразвука, или продольного, или крутящего. Другой целью паузы или пропуска между приводными сигналами является то, чтобы дать возможность ультразвуковому движению пьезоэлектрических элементов 14 и рупора 12 уменьшаться или останавливаться перед возбуждением другого (или продольного, или крутящего) режима. Такое затухание между приводными сигналами уменьшает величину потенциальных нелинейных взаимодействий в системе, которые могут создавать нежелательное тепло и приводить к преждевременной деградации пьезоэлектрических элементов 14 или механическому повреждению всего узла.
Альтернативно, может быть незначительное перекрытие в продольных и крутящих приводных сигналах. Перекрытие может обеспечивать относительно короткие временные интервалы, когда добавочное действие как крутящего, так и продольного смещения приводит к особенно высокой скорости эмульсификации хрусталика глаза, и все же перекрытие должно быть достаточно коротким, чтобы предотвратить преждевременную деградацию пьезоэлектрических элементов 14 или повреждение всего механического узла в результате избыточного напряжения.
Еще другим вариантом является полное перекрытие как продольных, так и крутящих приводных сигналов, таким образом, приводя к приложению уровней высокого напряжения к веществу хрусталика глаза, когда перекрываются два сигнала, и все же оставляя паузу между ними для самовосстановления окклюзии и нарастания разрежения, таким образом, повышая эффективность применения следующего импульса.
Еще другим вариантом является применение непрерывного продольного сигнала с импульсным крутящим сигналом, или наоборот, непрерывного крутящего сигнала с импульсным продольным сигналом. Непрерывное приложение крутящего ультразвука не вызывает отталкивания, так как движение кончика 20 ориентируется перпендикулярно направлению контактирования кончика 20 с хрусталиком глаза, и импульсное приложение продольного ультразвука достаточно короткое, чтобы предотвратить перегрев или механическое повреждение пьезоэлектрических элементов 14.
Дополнительно, как описано выше, как продольные приводные сигналы, так и крутящие приводные сигналы могут прикладываться непрерывно и одновременно, причем амплитуды обоих сигналов выбираются так, что уменьшается перегрев и избыточное механическое напряжение в системе. Если должна использоваться такая схема привода, предпочтительны два набора пьезоэлектрических элементов 14, при этом крутящий сигнал прикладывается к одному набору, тогда как продольный сигнал прикладывается к другому набору.
Наконец, продольное движение кончика способствует выведению вещества, которое аспирируется в кончик аналогично перистальтической накачке. Крутящее движение кончика не создает этого перистальтического движения. Как результат, кончик 20 может иметь тенденцию закупориваться, когда используется исключительно крутящее движение. Закупоривание кончика проявляется повышением разрежения для аспирации в линии 50 аспирации, причем такое разрежение создается насосом 70. Поэтому, увеличение разрежения для аспирации измеряется в линии 50 аспирации посредством датчика 60 давления, датчик 60 подает эту информацию на схему 34 привода. Когда измеренное разрежение превышает предварительно определенный порог, может кратковременно включаться продольный режим, или увеличивается интенсивность или длительность, чтобы способствовать устранению любого закупоривания. Для специалиста в данной области техники понятно, что изменения длительности и/или временные соотношения продольного импульса могут быть сделаны такими, которые требуются для надлежащего устранения любого закупоривания кончика. Кроме того, некоторые более высокие уровни крутящей мощности могут быть более склонны к закупориванию, чем меньшие уровни мощности. Поэтому продольное движение может запускаться автоматически и при изменяемых уровнях мощности, когда уровень крутящей мощности достигает предварительно выбранного уровня мощности. Для специалиста в данной области техники также понятно, что фраза «уровень мощности» охватывает как амплитуду (ход), так и коэффициент заполнения импульса.
Хотя выше были описаны некоторые варианты осуществления настоящего изобретения, эти описания даны с целью иллюстрации и объяснения. Варианты, изменения, модификации и отступления от систем и способов, описанных выше, могут быть приняты без отступления от объема или сущности настоящего изобретения. Например, первичный приводной сигнал может иметь первую частоту и давать возможность осуществлять крутящее движение, тогда как вторичный приводной сигнал может иметь вторую частоту и давать возможность осуществлять продольное движение, или наоборот.
Изобретение относится к медицине, а именно к способам управления офтальмологическим факоэмульсификационным наконечником. Способ включает использование ультразвукового наконечника, имеющего кожух, множество пьезоэлектрических элементов, соединенных с ультразвуковым рупором, установленных внутри кожуха, и линию аспирации, подачу на пьезоэлектрические элементы приводного сигнала, имеющего первую частоту, создающую крутящее движение в рупоре, измерение разрежения в линии аспирации и подачу на пьезоэлектрические элементы приводного сигнала, имеющего вторую частоту, когда измеренное разрежение в линии аспирации превышает предварительно определенный порог. Вторая частота создает продольное движение в рупоре, достаточное для устранения закупоривания. Вариант выполнения способа предусматривает использование ультразвукового наконечника, дополнительно имеющего кончик, прикрепленный к рупору, при этом первичный приводной сигнал создает первое движение кончика, а вторичный - второе движение, достаточное для устранения закупоривания. Использование изобретения позволяет улучшить работу ультразвукового наконечника. 2 н. и 9 з.п. ф-лы, 4 ил.
1. Способ работы ультразвукового наконечника, включающий
a) обеспечение ультразвукового наконечника, имеющего кожух наконечника, множество пьезоэлектрических элементов, соединенных с ультразвуковым рупором, причем пьезоэлектрические элементы и рупор удерживаются внутри кожуха, и линию аспирации;
b) подачу на пьезоэлектрические элементы приводного сигнала, имеющего первую частоту, причем первая частота создает крутящее движение в рупоре;
c) измерение разрежения в линии аспирации; и
d) подачу на пьезоэлектрические элементы приводного сигнала, имеющего вторую частоту, когда измеренное разрежение в линии аспирации превышает предварительно определенный порог, причем вторая частота создает продольное движение в рупоре, причем продольное движение достаточно для устранения закупоривания.
2. Способ по п.1, в котором приводной сигнал, имеющий первую частоту, и приводной сигнал, имеющий вторую частоту, не перекрываются.
3. Способ по п.1, в котором приводной сигнал, имеющий первую частоту, и приводной сигнал, имеющий вторую частоту, перекрываются.
4. Способ по п.1, в котором приводной сигнал, имеющий первую частоту, прикладывается непрерывно, а приводной сигнал, имеющий вторую частоту, генерируется в импульсном виде в ответ на измеренное разрежение в линии аспирации.
5. Способ по п.4, в котором приводной сигнал, имеющий первую частоту, или приводной сигнал, имеющий вторую частоту, имеет изменяемую длительность импульса и/или временные соотношения.
6. Способ работы ультразвукового наконечника, включающий
a) обеспечение ультразвукового наконечника, имеющего кожух наконечника, множество пьезоэлектрических элементов, соединенных с ультразвуковым рупором, кончика, прикрепленного к рупору, причем пьезоэлектрические элементы и рупор удерживаются внутри кожуха, и линию аспирации;
b) подачу на пьезоэлектрические элементы первичного приводного сигнала, при этом первичный приводной сигнал создает первое движение кончика;
c) измерение разрежения в линии аспирации; и
d) подачу на пьезоэлектрические элементы вторичного приводного сигнала, когда измеренное разрежение в линии аспирации превышает предварительно определенный порог, причем вторичный приводной сигнал создает второе движение кончика, достаточное для устранения закупоривания.
7. Способ по п.6, в котором первичный приводной сигнал и вторичный не перекрываются.
8. Способ по п.6, в котором первичный приводной сигнал и вторичный приводной сигнал перекрываются.
9. Способ по п.6, в котором первичный приводной сигнал прикладывается непрерывно, а вторичный приводной сигнал генерируется в импульсном виде в ответ на измеренное разрежение в линии аспирации.
10. Способ по п.6, в котором первичный приводной сигнал имеет изменяемую длительность импульса и/или временные соотношения.
11. Способ по п.6, в котором первичный приводной сигнал или вторичный приводной сигнал имеет изменяемую длительность импульса и/или временные соотношения.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 6402769 В1, 11.06.2002 | |||
| US 5766146 А, 16.06.1998 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Устройство для удаления катаракты | 1979 |
|
SU906560A1 |

