(5) УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ КАТАРАКТЫ




1
Изобретение относится к хирургической техни.ке, применяемой s офтальмохирургии, в частности для удаления катаракты.
Известен ультразвуковой прибор для эмульсификации катаракты, содержащий пульт управления с блоком дистанционного управления, системы эмуль сификации, состоящую из ультразвукового генератора, эмульсификатора и блока его охлаждения, систему ирригации глаза адаптированным раствором с гидроклапаном, систему аспирации с датчиком скорости оттока эмульсификата, гидроклапаном и пневмоклапаном р.
Однако такой прибор не обеспечивает защиты оперируемого глаза от теплового действия ультразвука и превышения суммарной дозы облучения ультразвуком, поддержания в оперируемом глазу постоянного давления и питания адаптированным раствором под необходимым давлением дополнительных инструментов. Кроме того, контроль за ходом операции ведется хирургом только визуально, а регулировка мощности ультразвука и величины вакуума в системе аспирацииоператором. Это осложняет контроль за ходом операции и делает ее небезопасной.
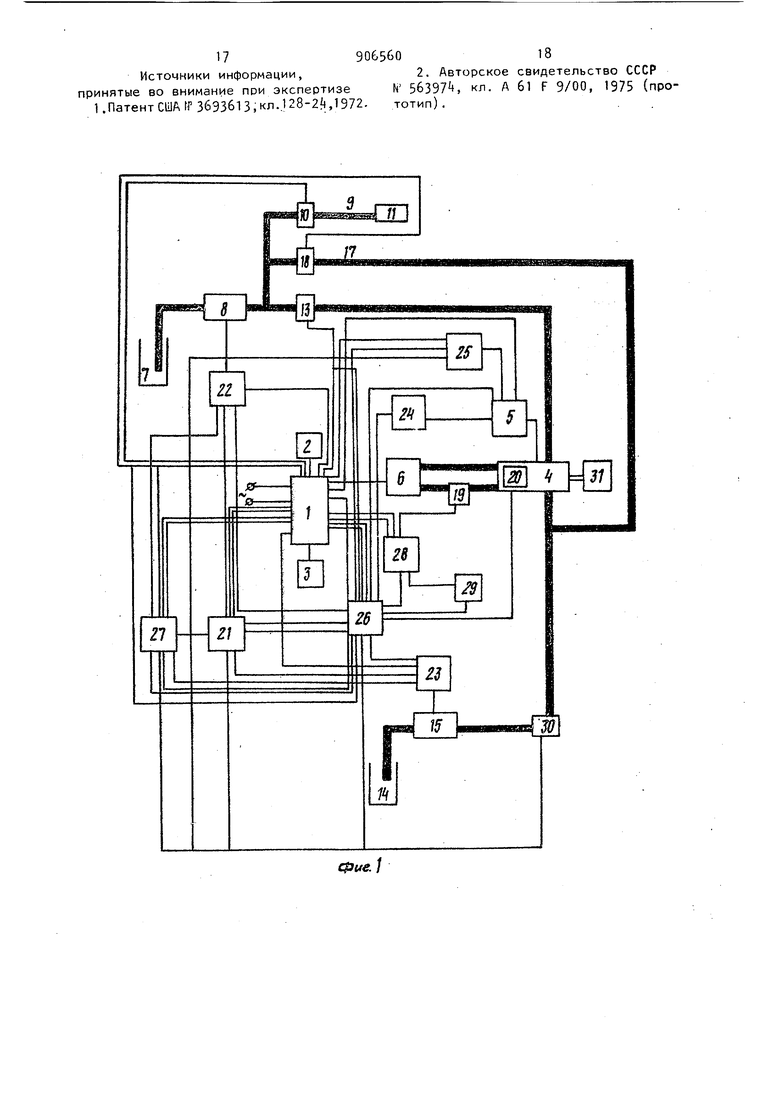
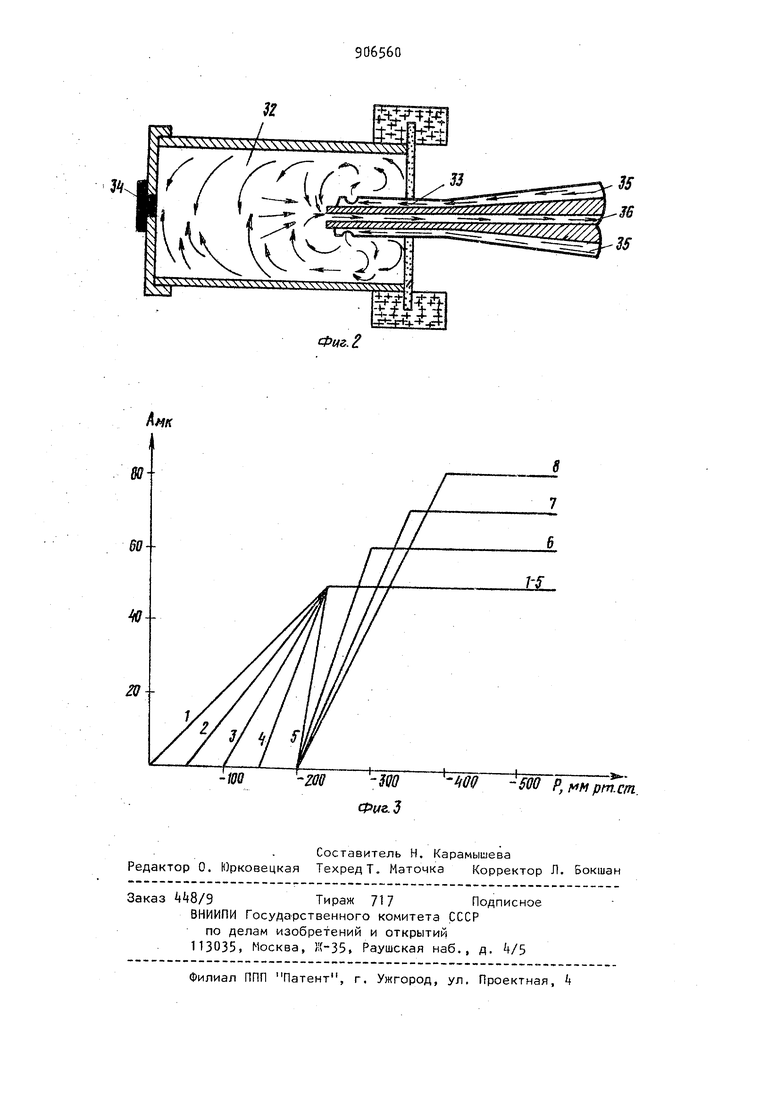
Известно также устройство для удаления катаракты, включающее пульт управления, связанные с ним блок дистанционного управления, блок сигнализации и систему эмульсификации, содержащую соединенные между собой эмульсификатор, ультразвуковой генератор и блок охлаждения, систему ирригации глаза, содержащую емкость для сбора адаптированного раствора и насос, подключенный через первый и второй клапаны к пульту и эмульсификатору и через третий клапан, связанный с пультом управления, к дополнительному инструменту, и систему аспирации глаза, содержащую емкость для сбора эмульсификата и насос, связанные между собой датчик дозы ультразвука и блок защиты, под ключенный к пульту упразления и соединенный с последним блок восста новления давления 2. Недостатки известного устройства заключается в том, что в процессе .операции контроль за работой систем устройства ведется на режимах, пограничных с опасными для глаза. Кроме того, пневмо-гидравлическая система вытеснения, используема для ирригации и аспирации, удлиняет время переходных процессов, что ели .яет на уровень внутриглазного давле ния и снижает надежность контроля , за ходом операции. Цель изобретения - повышение безопасности проведения операции путем сокращения времени воздействия ультразвука и уменьшения диапазона изменений внутриглазного давления. Поставленная цель достигается тем, что в устройство для удаления катаракты, включающее пульт управления, связанные с ним блок дистанционного управления, блок сигнализации и систему эмульсификации, содержащую соединенные между собой эмульсификатор, ультразвуковой генератор и блок охлаждения, связанные между собой систему аспирации газа, содержащую емкость для сбора эмульсификата и насос, подключенный через первый и второй клапаны к пульту и эмульсификатору и через третий клапан, связанный с пультом управления, к дополнительному инструменту, и систему ирригации глаз содержащую емкость для адаптированного раствора и насос, связанные между собой датчик дозы ультразвука и блок защиты, подключенный к пульту управления, и соединенный с последним блок восстановления давления введены блок контроля, связанные с последним блок синхронизации, блок регулирования давления системы аспи рации, давления системы ирригации, блок режимов, блок настройки частоты,датчика амплитуды, датчик давления системы аспирации и датчик давления блока охлаждения, соединен ный с блоком охлаждения, эмульсификатором и блоком защиты, при этом блок контроля связан с блоком восстановления давления, пультом управ ления, блоком защиты, ультразвуковым генератором, соединенным с блоком настройки частоты и блоком режима, первым и вторым клапанами и датчиком дозы, а блок регулирования давления системы ирригации и блок регулирования давления системы аспирации соединены с блоком восстановления давления, пультом управления, соответствующими насосами и блоком синхронизации, связанным с пультом управления, датчиком давления системы аспирации и блоком восстановления , причем последний соединен со вторым клапаном и датчиком давления системы аспирации, а блок режимов - с пультом управления и датчмком давления системы аспирации. На фиг. 1 изображеиа блок-схема устройства для удаления катаракты; на фиг. 2 - настроечная камера, используемая при первичной настройке устройства и при профилактических ремонтах: на фиг. 3 - график зависимости амплитуды колебаний рабочего конца эмульсификатора от давления в системе аспирации, характеризующие различные режимы работы, выбираемые перед каждой операцией. Устройство для удаления катаракты содержит пульт V Управления, электрически связанные с ним блок 2 дистанционного управления и блок 3 дистанционной сигнализации, систему эмульсификации, состоящую из эмульсификатора k, электрически соединенного с ним ультразвукового генератора 5 и блока 6 охлаждения, гидравлически связанного с эмульсификатором k, систему ирригации глаза адаптированным раствором, включающую емкость 7 для адаптированного раствора, гидравлически связанный с ней насос 8, гидромагистраль 9 с клапаном 10, соединяющую систему ирригации с дополнительным инструментом 11, гидромагистраль 12 с клапаном 13, соединяющую систему ирригации с эмульсификатором 4, систему аспирации глаза, включающую емкость k для сбора эмульсификата, насос 15, гидравлически связанный с емкостью 14, гидромагистраль 16, соединяющую систему аспирации с эмульсификатором 4, гидромагистраль 17 с клапаном 18 соединяющую систему ирригации и систему аспирации, датчик 19 давления системы охлаждения, установленный в гидромагистрали, связывающей блок 6 охлаждения с эмульсификатором 4, датчик 20 амплитуды, вмонтированный в эмульсификатор , блок 21 синхронизации, блок 22 регулировки давления системы ирригации, блок 23 регулировки давления системы, аспирации, блок 2 настройки частоты, блок 25 режимов, блок 2б контроля, блок 27 восстановления давления, блок 28 за щиты, датчик 29 дозы ультразвука, датчик 30 давления системы аспираци настроечную камеру 31 с внутренней полостью 32, которая имеет первый вход 33 для введения конца эмульсиф катора k и второй вход З для введе ния датчиков давления температуры, мощности вибрации соответствующих контрольно-измерительных приборов. Рабочий конец эмульсификатора + име ет кольцевидный канал 35, соединенный с гидромагистралью 12, идущий о системы ирригации, и центральный ас пирационмый канал Зб в вибраторе эмульсификатора , связанный через гидромагистраль 16 с системой аспирации . Устройство работает следующим, образом. Сначала, проводят предварительную настройку устройства. Устанавливают зависимости между производительност насосов 8 и 15 систем ирригации и аспирации и давлением в системе аспирации, контролируемым датчиком 30 давления, значениями давлений в сис теме аспирации, соответствующими но мальному внутриглазному давлению и временем, за которое эти значения достигаются. Указанные зависимости значений давлений и времени определяются для всех этапов предоперационного режима Контроль работы уст ройства. Значения давлений в системе аспирации, соответствующие нормальному внутриглазному давлению, определяются при помощи настроечной камеры 31I через вход 33 которой введен в полость 32 рабочий конец эмульсификатора k, а через вход З датчик давления. Объем настроечной камеры равен объему части глаза, в котором производится операция. Изменяя производительность насосов и 15 с помощью датчика 30 давлени фиксируют давление системы аспираци при котором показание датчика давления, установленного в настроечной камере 31 через вход 3, равно нормальному внутриглазному давлению. 606 диапазон изменения которого 1030 мм рт.ст. Установление указанных зависимостей и параметров необходимо для поддержания на протяжении всей операции в передней камере глаза нормального внутриглазного давления, например 20 мм рт.ст., с возможным отклонением в сторону увеличения на 10 мм рт.ст. Во время операции внутриглазное давление контролируется по соответствующим ему показаниям датчика 30 давления в системе аспирации. Таким образом проводят тарировку устройства. Затем проводят предоперационную настройку устройства. Перед начался операции удаления каратакты рабочий конец эмульсификатора k вводится через вход 33 в полость 32 настроечной камеры 31. Выход 3 камеры 31 закрыт пробкой. Эмульсификатор с камерой 31 устанавливается на уровне оперируемого глаза. На вход устройства подается питание от электрической сети, по сигналу с пульта 1 управления или блока 2 дистанционного управления устройство начинает работать в режиме Контроль, который состоит из семи Этапов и проводится непос)эедственно перед каждой операцией удаления катаракты. При этом используют установленные заранее зависимости и значения параметров, предварительно определенные экспериментально проведением семи этапов режима Контроль Необходимость настройки устройства перед каждой операцией вызвана тем, что, например, в процессе подготовки устройства к операции в результате стерилизации его гидромагистралей и других деталей возможно изменение их гидросопротивлений и поэтому предварительно установленные производительности насосов могут не обеспечить необходимого уровня давления в системе аспирации для поддержания в настроечной камере 31, а во время операции и в передней камере глаза нормального внутриглазного давления, например 20 мм рт.ст. Контроль системы ирригации ( К1 }. Блок 26 контроля через блок 22 регулировки давления системы ирригации включает насос 8 системы ирригации и открывает клапан 18 гидромагистрали 17, соединяющей системы ирригации и аспирации. Адаптированный раствор из емкости 7 по гидромагистралям 17 и 16 поступает к датчику 30 давления системы аспирации и по аспирациЬнно(у каналу 36 эмульсификатора в полость 32 настроечной камеры 31- Блок 12 регулировки давления системы ирригации, изменяя производительность насоса 8 системы ирригации, устанавливает в течение заданного времени в системе аспирации определенный экс периментально уровень давления, необходимый для поддержания нормально.го внутриглазного давления в настроечной камере 31 что регистрируется датчиком 30 давления системы аспира7 ции. Блок 26 контроля фиксирует установившуюся производительность насоса 8 через блок 22 и затем закрывает клапан 18 гидромагистралн 17 и открывает клапан 13 гидромагистрали 12, соединяющей систему ирригации с эмульсификатором k-, Контроль системы ирригации(К2. Адаптированный раствор емкости 7 по гидромагистрали 12 поступает по коль невидному каналу 35 эмульсификатора k в камеру 31 и оттуда по аспирационному каналу Зб и гидромагистрали 15 к датчику 30 давления системы аспирации, который при этом регистрирует давление, равное давлению, установленному в режиме К1. Если давление не соответствует заданному по истечении заданного времени, блок 26 контроля повторяет цикл, начиная с режима К1. Контроль системы аспирацииСкЗ). Правильность работы системы ирригации в режиме К2 служит сигналом блоку 26 контроля для включения блока 2 синхронизации, который через блок 23 регулировки давления системы аспирации включает насос 15 системы аспирации на определенную производительность и через блок 22 регулировки давления системы ирригации повышае.т производительность насоса 8 системы ирригации на заданную величину. При этом датчик 30 давления системы аспирации должен зарегистри ровать установленный заранее для данного режима соответствующий нормальному . внутриглазному давлению уровень давления. Если давление не соответствует заданному уровню, то по сигналу с блока 2б контроля 23 регулировки давления системы аспира ции, изменяя производительность насоса 15 системы аспирации, устанавливает заданный уровень, а блок 26 контоля по сигналу с датчика 30 давления системы аспирации фиксирует установившуюся производительность насоса 15Контроль синхронности работы систем ирригации и аспирации СКА). Достижение давления, в системе аспирации соответствующего режиму КЗ и регистрируемого датчиком 30 давления, служит сигналом блоку 26 контроля для повышения производительности насосов 8 и 15 до максимального значения через блок 21 синхронизации и блоки 22 и 23 регулировки давления систем ирригации и аспирации. Если при этом датчик 30 давления регистрирует заданный для данного этапа уровень давления в системе аспирации, то устройство переключается на следующий этап контроля, если нет должного уровня, блок 26 контроля возвращает устройство на работу в режим КЗ и повторяет вышеописанные операции. Контроль работы системы эмульсификации(К5). Блок 26 контроля через пульт 1 управления включает блок 6 охлаждения. При наличии давления заданного в системе охлаждения, что регистрируется датчиком 19 давления системы охлаждения, блок 23 защиты через пульт 1 управления включает ультразвуковой генератор 5- Рабочий конец эмульсификатора 4 начинает колебатьсят Ток смещения, подводимый к катушке эмульсификатора k имеет максимальную заданную для данного этапа величину, устанавливаемую блоком 26 контроля. Блок 26 контроля включа.ет блок 2 настройки частоты, который изменяет частоту ультразвукового генератора 5 flo совпадения его частоты с резонансной частотой эмульсификатора , что регистрируется датчиком 20 амплитуды по возникновению максимальной амплитуды колебаний рабочего конца эмульсификатора 4. Затем блок 26 контроля по сигналу с датчика 20 амплитуды отключает блок 2 настройки частоты, фиксируя .частоту работы ультразвукового генератора 5 и переключает устройство на следующий этап контроля. Контроль синхронности работы систем аспирации и эмульсификации(Кб). Елок 26 контроля включает блок 25 режимов, который предназначен для установления синхронности работы систем эмульсификации и аспирации, т.е. для установления зависимос-ти амплитуды колебаний рабочего конца эмульсификатора k от давлении в системе аспирации. На данном этапе по одной из зависимостей fфиг.з)про изводят проверку синхронности работы систем аспирации и эмульсификации. После влкючения блока 25 режимов блок 2б контроля закрывает клапаН 13 гидромагистрали 12, соединяющей систему ирригации с эмульсификатором 4. При этом работающий насос 15 системы аспирации, откачивая жидкость из гидромагистралей 12, 16 и 17 каналов 35 и 36 змульсификатора и настроечной камеры 31, создает в них отрицательное давление, что регистрируется датчиком 30 давления, сигнал от которого приходит на блок 21 синхронизации и блок 25 режимов. Последний по мере роста от рицательного давления увеличивает ток смещения, подводимый к катушке эмульсификатора k от ультразвукового генератора 5 от нуля до максимал ной величины, тем самым увеличивая амплитуду колебаний рабочего конца эмульсификатора k согласно выбранной для контроля зависимости амплитуды колебаний рабочего конца эмуль сификатора от давления в системе аспирации. Если повышение отрицательного давления и рост амплитуды протекают синхронно по времени и ве личине, устройство переключается на следующий этап контроля. Контроль работы блока 27 восстановления давления СК7). Блок 26 контроля открывает клапан 13 гидром гистрали 12, соединяющей систему ирригации и эмульсификатор k. При этом давление в гидромагистралях 12 и 1б и настроечной камере 31 повышается, что регистрируется датчиком 30 давления, и служит сигналом к включению блока 27 восстановления давления. Блок 27 восстановления давления через блок 23 регулировки давления системы аспирации останавливает насос 15 системы аспирации, открывает клапан 18 гидромагистрали 17, соединяющей систему ирригации с системой аспирации, и через блок 22 регулировки давления системы ирригации повышает производитель ность насоса 8 системы ирригации на заданную величину. При этом давле010ние в гидромагистралях 12, 16 и 17 и в камере 31 повышается до величины, установленной в режиме К1. Если восстановление давления происходит за установленный промежуток времени, блок 26 контроля переключает устройство на режим Подготовка, что свидетельствует о правильности работы всех систем устройства. Если одна из контролируемых систем в процессе работы устройства в режиме Контроль не работаетв заданных значениях контролируемых параметров, блок 2б контроля не переключает устройство на последукяций этап контроля и индифицирует причину на пульте 1 управления и на блоке 3 дистанционной сигнализации. После переключения устройства на режим Подготовка насосы 8 и 15 выключаются,клапаны 13 и 18 закрываются, а с рабочего конца эмульсификатора k снимается настроечная камера 31. Устройство готово к проведению операции. К гидромагистрали 9 присоединяют дополнительные инструменты 11, с помощью которых производится рассечение и удаление капсулы хрусталина и другие манипуляции. По сигналу с пульта 1 управления или блока 2 дистанционного управления включается насос 8 системы ирригации. Затем конец дополнительного инструмента 11 вводится в разрез тканей глаза, по сигналу с пульта I управления или блока 2 дистанционного управления открывается клапан 10 и жидкость из емкости 7 через дополнительный инструмент 11 заполняет переднюю камеру глаза, после чего инструмент 11 вводят на необходимую глубину и производят рассечение передней капсулы хрусталина и ее удаление при заданном уровне внутриглазного давления. По сигналу с пульта 1 управления или блока 2 дистанционного управления клапан 10 закрывается. Дополнительный инструмент извлекается из глаза. По сигналу с пульта 1 управления ли блока 2 дистанционного управлеия устройство переключается на peИМ Введение, при этом открываетя клапан 18 гидромагистрали 17, соеиняющей систему аспирации с систеой ирригации, жидкость из емкости 7 оступает по гидромагистралян 17. 6 и аспирационному каналу 36 эмульсификатора 4 в переднюю камеру глаз До заполнения передней камеры глаза рабочий конец эмульсификатора k вве ден только в разрез тканей глаза. После заполнения передней камеры ра бочий конец эмульсификатора вводится на необходимую глубину. Между наружной стенкой рабочего конца эмульсификатора i и стенками разреза тканей глаза возможна утечка жидкости, из-за чего производительност насоса 8 системы ирригации, опреде- ленная на первом этапе режима Контроль ( К1 ) может оказаться недостаточной для поддержания нормального внутриглазного давления, что регистрируется датчиком 30 .давления сис темы аспирации. По сигналу с датчик 30 блок 26 контроля через блок -22 регулировки давления системы иррига ции повышает производительность насоса 8 системы ирригации, повышая внутриглазное давление до заданного Лосле достижения заданного уровн внутриглазного давления по сигналу с пульта 1 управления или блока 2 дистанционного управления устройство переключается на режим Удаление. При этом клапан 18 закрывается, а клапан 13 открывается, включается блок 6 охлаждения. Режим Удаление состоит из нескольких этапов. .Контроль системы аспирации (У1). По сигналу с пульта 1 управления или блока 2 дистанционного управления через блок 23 регулировки давления системы аспирации включается Насос 15 системы аспирации на производительность, установленную в ре жиме КЗ. При достижении отрицательного давления в системе аспирации, соответствующего заданному за установленное время по сигналу с датчика 30 давления системы аспирации блок 2б контроля включает блок 21 на следующий этап У2. При недостато ном отрицательном давлении в системе аспирации блок 26 контроля через блок 23 регулировки давления систем аспирации повышает производительноность насоса 15 системы аспирации. При давлении в системе аспирации ни же заданного блок 26 контроля включает блок 21 синхронизации на этап УЗ, минуя этап У2. Форсированное промывание операционной зоны ( У2). По сигналу с бло ка 26 контроля блок 21 синхронизации через блоки 22 и 23, регулировки давления переключает насосы 8 и .15 систем ирригации и аспирации на максимальную предварительно установленную производительность. При этом хрусталик или его частицы закрывают вход в аспирационный канал 36 рабочего конца эмульсификатора 4, вызывая этим снижение давления в системе аспирации, регистрируемое датчиком 30 давления системы аспирации, что служит сигналом блоку 21 синхронизации для переключения на этап УЗ. Удаление катаракты (.УЗ). Изменяя через блоки 22 и 23 регулировки давления производительность насосов 8 и 15 систем ирригации и аспирации, блок 21 синхронизации поддерживает в передней камере глаза заданный уровень внутриглазного давления по сигналам с датчика 30 давления системы аспирации. По сигналу с датчика 30 давления системы аспирации блок 25 режимов изменяет величину тока смещения, подаваемого с генератора 5 на катушку эмульсификатора 4, согласно выбранной перед операцией, исходя из биологических свойств хрусталина больного,, зависи мости, характеризующей синхронность работы систем эмульсификации и аспирации (фиг.З). 8 процессе удаления катаракты время прироста отрицательного давления в системе аспирации учитывается, так как оно является показателем правильности синхронизации отрицательного давления в системе аспирации, которое удерживает на рабочем конце эмульсификатора k разрушаемый хрусталин или его часть, и величины амплитуды рабочего конца эмульсификатора k, который, разрушая хрусталин, отталкивает его. Если величина амплитуды рабочего конца эмульсификатора k меньше, чем необходимая для данной твердости разрушаемого хрусталина, то хрусталин отталкиваться, а не разрушаться, и время прироста отрицательного давления замедлится. Если величина амплитуды рабочего конца эмульсификатора 4 больше, чем трубется для разрушения хрусталина, то время прироста давления ускорится что опасно заполнением системы аспирации неразрушенными частями хрусталина и необходимостью прерывания операции для очистки системы аспирации. Поэтому блок 26 контроля при замедленном темпе прироста отрмцательного давления переключает блок 25 режимов на режим, при котором ультразвуковая вибрация рабочего конца эм льсификатора k появляется при более низком отрицательном давлении в системе аспирации, т.е. на режим, который характеризуется зависимостью, лежащей правее перво: начально выбранной перед операцией (фиг.З), а при быстром - на режим, при котором ультразвуковая вибрация рабочего конца эмульсификатора появляется при более высоком отрицательном давлении, который характеризуется зависимостью, лежащей левее первоначально выбранной. Установленная в режиме К5 частота работы ульт развукового генератора 5 в процессе удаления катаракты поддерживается блоком 2k настройки частоты. Величина амплитуды колебаний рабочего конца эмульсификатора контролируется блоком 2б контроля по сигналам с датчика 20 амплитуды. Кроме того, блок 26 контроля, чтобы не вызвать . нагревания тканей глаза, через оп-ределенные промежутки .времени, кор ректируемые блоком 25 режимов, переключает устройство на следующий этап У. Восстановление давления (У). Бло 27 восстановления давления включается по сигналу с блока 26 контроля и с датчика 30 давления системы аспирации при повышении давления в ней, что свидетельствует об открытии входа в аспирационный канал Зб эмульсификатора k. При этом открывается кла пан 18 гидромагистрали 17, соединяющей системы аспирации и ирригации, через блок 22 регулировки давления п вышается производительность насоса 8 системы ирригации, а через блок 23 регулировки давления останавливается насос 15 системы аспирации. Подъем давления в системе аспирации вызывает отключение через блок 26 контроля подачи ультразвуковой энергии к эмульсификатору k. Блок 26 контроля по сигналу с датчика 30 давления 3 системе аспирации выключает блок 27 восстановления давления и переключает устройство на этап У1. Этапы У1-У повторяются до полного удаления хрусталина. Причем после удаления всех видимых хирургу час 01/ тиц устройство обязательно включается на этап У2, время работы в котором контролируется блоком 26 контроля . С помощьк форсированного промывания операционной зоны вымываются мелкие частицы, задерживающиеся в лакунах радужной оболочки, в углу передней камеры в складках капсулы у экватора хрусталина. По сигналу блока 26 контроля по истечении времени этапа У2 включается блок 28 защиты, выключающий подачу ультрайвуковой энергии к эмульсификатору k, останавливающий работу насоса 15 системы аспирации м насоса 8 системы ирригации через пульт 1 управления и блоки 22 и 23 регулировки давления и закрывающий все клапаны устройства. После этого снимается питание от сети с входа устройства. Блок 28 защиты включается по сигналу с блока 26 контроля при несоответствии давления в системе аспирации заданному по истечении времени, необходимого на автоматическую регулировку на этапах У1 и У, а также при несоответствии амплитуды коле- баний рабочего конца эмульсификатора 4 уровню отрицательного давления на этапе УЗ. Блок 28 защиты включается также по сигналу с датчика 19 давления системы охлаждения при недостаточном давлении, по сигналу с датчика 29 дозы ультразвука, который получает и суммирует через блок 2б контроля сигнал с датчика 20 амплитуды.. . На любом этапе операция может быть временно прервана с пульта 1 оператором или с блока 2 дистанционного управления хирургом путем включения блока 28 защиты. Предлагаемое устройство позволяет повысить безопасность проведения операции удаления катаракты за счет того, что правильность работы системы устройства контролируется на приборе, полностью подготовленном .к операции, с помощью блока контроля, электрически взаимосвязанного со всеми системами устройства и датчиками; выполнение систем аспирации и ирригации гидравлическими уменьшает время переходных процессов между этапами различных режимов, что позволяет удерживать в течение всей операции установленный уровень внутриглазного давления, например 20 мм рт.ст. с отклонением в сторону увеличения 10 мм рт.ст. Кроме того блок режимов, электрически соединенный со всеми системами устройства и блоком контроля, позволяет устаноЁить до начала операции синхронность работы системы аспирации и эмульсификации, исходя из биофизических свойств хрусталина и своевременно изменять ее в ходе oneрации в зависимости от времени прироста отрицательного давления в системе аспирации, не допуская как прерывания операции вследствие заполнения системы аспирации неразрушенными частями хрусталина, так и .увеличения времени проведения операции, а значит и увеличения дозы энергии ультразвуковых колебаний, воздействующих на глаз; а также время работы устройства в отдельных режимах определяется не хирургом субъективно во время операции, а его определенные во время предварительной настройки устройства значения для всех режимов устанавливает блок контроля и контро лирует их соблюдение. Для использования устройства не требуется специальный стол-подъемник, с помощью которого устанавливаю уровень устрой-ства относительно оперируемого глаза, так как об уровне внутриглазного давления судят по показаниям датчика давления в системе аспирации, заранее установив их соот ветствие друг другу во всех режимах Все режимы и их этапы, причины срабатывания блока 28 защиты, работа блока контроля индицируются на пульт управления и на блоке дистанционной сигнализации, установленного в поле зрения хирурга. Таким образом, хирург визуально может полностью контролировать работ устройства, также как и управлять им в процессе операции без помощи подготовленного оператора, поскольку включение сетевого питания и переключение устройства на режим Контроль может быть выполнено неподготовленным персоналом. Применение устройства расширяет круг показаний к удалению катаракты сокращает время пребывания больного в стационаре, упрощает уход и более быстро реабелитирует больных. 9 Формула изобретения Устройство для удаления катаракты, включающее пульт управления, связанные с ним блок дистанционного управления, блок сигнализации и систему эмульсификации, содержащую соединенные между собой эмульсификатор, ультразвуковой генератор и блок охлаждения, связанные между собой систему аспирации газа, содержащую емкость для сбора эмульсификата и насос,подключенный через первый и второй клапаны к пульту и эмульсификатору и через третий клапан, связанный с пультом управления, к дополнительному инструменту, и систему ирригации глаза, содержащую емкость для адаптированного раствора и насос, связанные между собой датчик дозы ультразвука и блок защиты, подключенный к пульту управления, и соединенный с последним блок восстановления давления , отличающееся тем, что, с целью повышения безопасности проведения операции путем сокращения времени воздействия ультразвука и уменьшения диапазона изменений внутриглазного давления, в него введены блок контроля, связанные с последним блок синхронизации, блок регулирования давления системы ирригации, блок регулирования давления системы аспирации, блок режимов, блок настройки частоты, датчик амплитуды, датчик давления системы аспирации и датчик давления блока охлаждения , соединенный с блоком охлаждения , эмульсификатором и блоком защиты, при этом блок контроля связан с блоком восстановления давления пультом управления, блоком защиты., ультразвуковым генератором, соединенным с блоком настройки частоты и блоком режима, первым и вторым клапанами и датчиком дозы, а блок регулирования давления системы ирригации и блок регулирования давления системы аспирации соединены с блоком восстановления давления, пультом управления, соответствующими насосами и блоком синхронизации, связанным с пультом управления, датчиком давления системы аспирации и блоком восстановления, причем последний соединен со вторым клапаном и датчиком давления системы аспирации, а блок режимов - с пультом управления и датчиком давления системы аспирации.
Источники информации,2. Авторское свидетельство СССР
принятые во внимание при экспертизе N 5(ЗЭ7, кл. А 61 F 9/00, 1975 (проl.naTeHTCinAtf 3693613,кл..128-2),1972. тотип) .
90656018
Фиг.
Р
tSfcsi
