Изобретение относится к системе управления рельсовым транспортным средством, которое позволяет определить его остановку. Кроме того, изобретение относится к рельсовому транспортному средству с указанной системой управления и к соответствующему способу.
В рельсовых транспортных средствах различные функции зависят от того, находится ли транспортное средство в состоянии остановки или нет. Например, функция открывания двери включается, как правило, только тогда, когда транспортное средство стоит. Определение остановки осуществляется зачастую повагонно или локально в зависимости от сигналов, формируемых находящимися на вагоне датчиками. Такими датчиками могут быть, например, датчики скорости осей противоюзного устройства. При выходе датчиков из строя определение остановки может усложниться, или его вообще нельзя будет больше осуществить.
Задача изобретения состоит в том, чтобы с небольшими затратами обеспечить надежное определение остановки.
Эта задача решается посредством изобретения, охарактеризованного признаками независимых пунктов формулы.
Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы.
Изобретение относится к системе управления рельсовым транспортным средством, содержащей устройство управления, подключенное или подключаемое для приема сигналов датчиков, причем сигналы датчиков представляют соответственно по меньшей мере одну скорость, а также по меньшей мере одно шинное присоединение, посредством которого устройство управления подключено или подключается к шине данных для обмена ими. Устройство управления на основе сигналов датчиков формирует сигнал остановки и передает его на шину данных. Кроме того, система управления содержит устройство определения остановки, которое принимает по шине данных сигналы остановки и на их основе определяет, находится ли рельсовое транспортное средство в состоянии остановки. Таким образом, по шине данных, которая может связывать между собой несколько вагонов, передаются сигналы остановки, которые могут локально обрабатываться устройством определения остановки. Поэтому локальное определение остановки может осуществляться на основе большого числа сигналов датчиков. Даже если в одном вагоне из строя выйдут один или несколько датчиков, можно осуществить надежное определение остановки. Сигналы могут формироваться подходящими датчиками, которые могут быть выполнены как части системы управления или отдельно от нее. Датчиками могут быть, например, относящиеся к противоюзному устройству датчики скорости осей или датчики частоты вращения. Одним датчиком может быть также основанный на радаре датчик или оптический датчик, который обеспечивает измерение скорости. Один датчик может быть выполнен для измерения величины, представляющей скорость, в частности скорость транспортного средства и/или скорость вагона. Одну величину можно рассматривать как представляющую скорость, если по ней можно определить и/или вычислить скорость, при необходимости, используя дополнительные параметры, например диаметр колес. Сигнал датчика, указывающий такую величину, можно рассматривать как представляющий скорость сигнал. Устройство управления может быть соединено или может соединяться соответственно с несколькими датчиками. Возможно, чтобы датчики были выполнены для определения скорости независимо друг от друга. Например, могут быть предусмотрены приданные нескольким разным осям датчики их скорости, которые независимо друг от друга определяют скорость соответственно одной оси. В принципе, в нормальном эксплуатационном состоянии рельсового транспортного средства, когда, например, при торможении не происходит скольжения, по скорости оси можно определить скорость рельсового транспортного средства. Каждому электронному устройству управления может быть придано по меньшей мере одно шинное присоединение. Возможно, чтобы для каждого из нескольких вагонов было предусмотрено электронное устройство управления, которое может быть присоединено или может присоединяться к шине данных. Шиной данных может быть посекционная или поездная шина данных, например Multifunction Vehicle Bus (MVB) (многофункциональная поездная шина, MVB-шина). Устройство определения остановки и электронное устройство управления могут быть реализованы в одном общем устройстве, например компьютере и/или микроконтроллере. Электронное устройство управления может располагать собственным программным кодом и интерфейсами, чтобы принимать, обрабатывать и передавать соответствующие сигналы. Устройство управления может быть реализовано, в частности, в рамках устройства управления торможением вагона.
Устройство управления может быть выполнено для приема сигналов нескольких датчиков и формирования сигнала остановки, который содержит для нескольких, представленных сигналами датчиков скоростей соответственно по меньшей мере одну информацию об остановке. Информация об остановке может иметь, в частности, ширину данных один бит. Таким образом, можно эффективно использовать имеющуюся ширину данных шины.
Может быть предусмотрено, что устройство управления выполнено для проверки действительности каждого принятого сигнала датчика. Проверкой может быть, например, проверка достоверности. Устройство управления может быть выполнено для контроля того, находится ли описанная сигналом датчика величина и/или ее временная характеристика в пределах заданных диапазонов параметров. Может быть также предусмотрено, чтобы устройство управления было выполнено для приема соответствующего сигнала скорости.
Далее устройство управления может быть выполнено для формирования сигнала остановки, который для каждой информации об остановке указывает ее действительность. Действительность может указываться соответствующим сигналом действительности, который может иметь ширину данных один бит.
Устройство определения остановки может быть выполнено для приема сигнала опорной скорости. Сигнал опорной скорости может указывать опорную скорость. Возможно, чтобы сигнал опорной скорости был формирован внешним устройством транспортного средства, например центральным компьютером, устройством управления торможением или противоюзным устройством. Может быть предусмотрено, что устройство определения остановки выполнено для приема или формирования сигнала, указывающего действительность сигнала опорной скорости. Устройство определения остановки может быть выполнено для проверки достоверности или проверки сигнала или временной характеристики сигнала на его/ее надежность, например, лежит ли представленная величина или временная зависимость или производная в пределах заданного диапазона параметров.
В частности, устройство определения остановки может быть выполнено для определения на основе сигнала опорной скорости, находится ли рельсовое транспортное средство в состоянии остановки. Таким образом, может быть создан резервный уровень. Может быть, например, предусмотрено, что устройство определения остановки выполнено для определения наличия остановки только тогда, когда опорная скорость ниже заданной предельной скорости.
Система управления может быть выполнена для повагонного определения остановки транспортного средства. В частности, в каждом из нескольких вагонов может быть предусмотрено одно устройство управления, которое для определения остановки учитывает соответственно сигналы остановки, переданные по шине данных другими вагонами и/или их устройствами управления.
Кроме того, изобретение относится к рельсовому транспортному средству с описанной системой управления.
Рельсовое транспортное средство может содержать несколько вагонов с электронным устройством управления каждый, которые соединены между собой или соединяются шиной данных.
Кроме того, изобретение относится к способу определения того, находится ли рельсовое транспортное средство в состоянии остановки, в частности описанное рельсовое транспортное средство. Способ включает в себя этапы формирования по меньшей мере одним электронным устройством управления соответственно сигнала остановки на основе сигналов датчиков, которые представляют соответственно по меньшей мере одну скорость, и передачи по меньшей мере одним электронным устройством управления соответствующего сигнала остановки на шину данных, а также определения устройством определения остановки, имеет ли место остановка транспортного средства, на основе принятых по шине данных сигналов остановки.
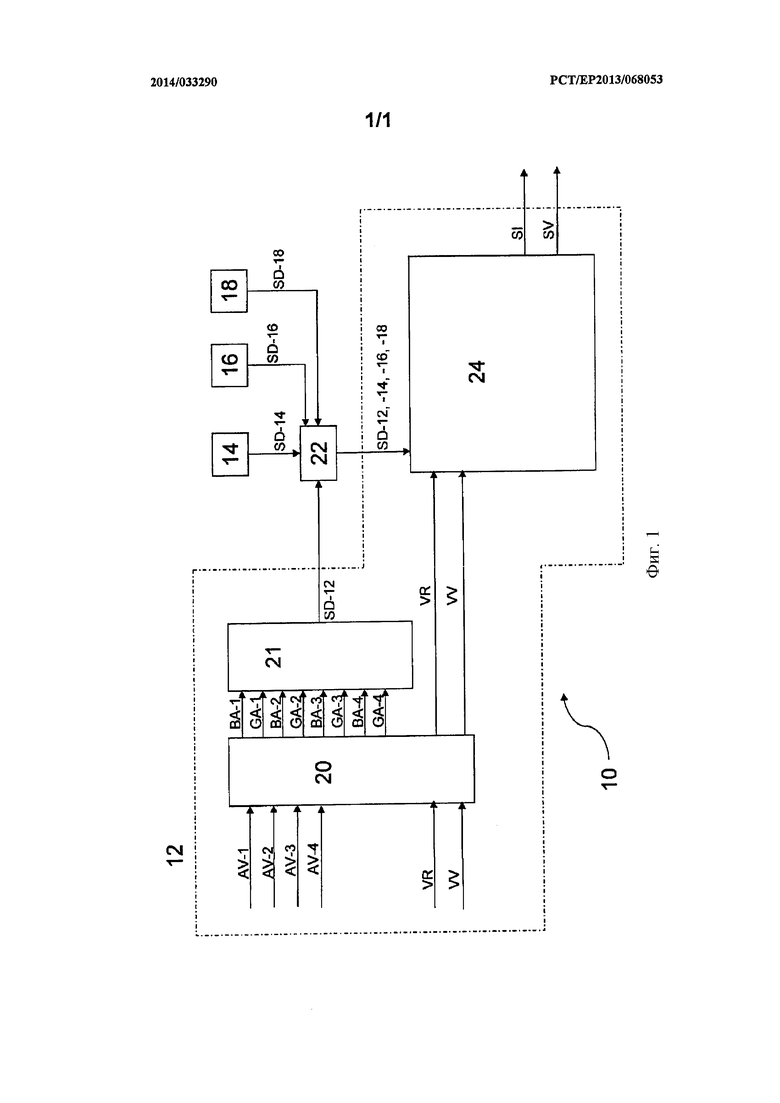
Изобретение поясняется ниже на предпочтительных вариантах его осуществления со ссылкой на фиг. 1, на которой схематично изображен пример системы управления, выполненной для формирования сигнала остановки.
На фиг. 1 изображен пример системы управления 10 для формирования сигнала остановки. В этом примере система 10 реализована в секции рельсового транспортного средства, содержащего четыре вагона 12, 14, 16, 18. Следует учесть, что система 10 может быть реализована в организованных по-другому секциях или во всем транспортном средстве. В каждом из вагонов 12, 14, 16, 18 предусмотрено электронное устройство управления 10. Эти устройства управления 20 соответственно через шинное присоединение подключены к шине данных 22, которая может быть, например, MVB-шиной. Шина данных 22 может быть выполнена по всему транспортному средству или посекционно. В этом примере следует исходить из того, что каждый из вагонов 12, 14, 16, 18 содержит две тележки с двумя колесными осями каждая. Каждой колесной оси придан датчик скорости, который способен контролировать колесную ось, в частности ее вращение. Возможно, чтобы не каждой колесной оси был придан датчик. Датчик выполнен для формирования сигнала, представляющего скорость оси. Такой сигнал может указывать, например, частоту вращения или скорость, полученную в результате контроля вращения оси. В качестве подходящих датчиков рассматриваются, например, датчики контроля колесных осей противогазного устройства, которые контролируют, например, частоту вращения оси или колеса. Однако возможно также, чтобы датчики в качестве альтернативы или дополнительно иным образом формировали представляющий скорость сигнал, например посредством радарного измерения, GPS или оптически. Каждый датчик выполнен для передачи на первое электронное устройство управления 20 сигнала AV-N, представляющего полученную скорость оси. N является при этом номерным обозначением датчика или контролируемую им ось. В этом примере N соответствует для каждого вагона числу от 1 до 4. Т.е. AV-1 обозначает сигнал, который представляет скорость оси, измеренную первым контролирующим ее датчиком, AV-2 описывает скорость оси, измеренную вторым контролирующим ее датчиком, и т.д. В этом примере предусмотрено, что каждое электронное устройство управления 20 принимает сигналы датчиков, которые расположены на том же вагоне, что и оно, и/или контролируют колесные оси того же вагона. Сигналы датчиков могут быть аналоговыми или цифровыми, в частности цифровыми сигналами с шириной данных несколько бит, которые электронное устройство управления 20 способно принимать и/или обрабатывать. Оно может быть выполнено для оценки действительности сигналов AV-V датчиков и/или приема соответствующего сигнала действительности. Действительность сигнала можно оценить, например, за счет проверки достоверности сигнала или его изменения. Например, может быть предусмотрена проверка того, находится ли сигнал или его временная производная в пределах или вне пределов определенного заданного диапазона параметров и/или он/она по физическим причинам недействителен/действительна. Может быть предусмотрено, что электронное устройство управления 20 выполнено для осуществления соответствующей проверки действительности. Возможно также, чтобы предвключенное устройство управления или датчик было/был выполнено/выполнен для осуществления такой проверки и передачи соответствующего сигнала действительности на электронное устройство управления 20. К нему подается также сигнал VR, указывающий опорную скорость. Опорная скорость VR может указывать скорость транспортного средства, которая может быть создана поездным, секционным или локальным устройством. Опорная скорость VR может обеспечиваться, например, маршрутным компьютером поезда, тормозным компьютером и/или противоюзным устройством, в частности противоюзным компьютером. Опорная скорость может представлять скорость транспортного средства и определяться по результатам измерений одного или нескольких сенсорных устройств, например по полученным от нескольких противогазных датчиков частотам вращения колесных осей одного или нескольких вагонов, в частности вагона, на котором расположено соответствующее устройство управления 20, и/или на основе радарных измерений и/или других сенсорных устройств для определения скорости. Кроме того, к устройству управления 20 подается сигнал VV, который указывает действительность сигнала опорной скорости. Устройство управления 20 выполнено для формирования или расчета сигнала BA-N остановки на основе каждого сигнала AV-N скорости оси. Сигнал BA-N остановки может быть предусмотрен для указания того, позволяет ли соответствующий сигнал AV-N скорости оси сделать вывод об остановке соответствующей оси и/или транспортного средства. Сигнал BA-N остановки может иметь, в частности, ширину данных один бит. Устройство управления 20 может быть выполнено для сравнения сигнала AV-N с предельным значением, которое может представлять предельную скорость. Если представленная сигналом AV-N скорость ниже предельной скорости, которая может составлять 3-5 км/ч, то устройство управления 20 может сформировать указывающую остановку информацию о ней, в данном примере в виде сигнала BA-N остановки оси. Если представленная сигналом AV-N скорость выше предельной скорости, то устройство управления 20 может сформировать информацию об остановке в виде сигнала BA-N остановки оси, который указывает на то, что данная ось не позволяет сделать вывод об остановке. Кроме того, устройство управления 20 выполнено для формирования соответствующего каждому сигналу BA-N остановки оси сигнала GA-N действительности. Каждый из сигналов GA-N действительности указывает, действителен ли соответствующий сигнал BA-N остановки оси и/или он основан на действительном сигнале датчика. Каждый из сигналов BA-N и GA-N имеет ширину данных один бит.Устройство управления 20 выполнено для формирования соответствующих сигналов BA-N и GA-N для каждого из датчиков, расположенных на соответствующем ему вагоне. Далее устройство управления 20 выполнено для группирования соответствующих сигналов BA-N и GA-N в одну группу 21 сигналов остановки и ее передачи по шине 22 данных в виде сигнала SD-12 остановки вагона. Если, как в данном случае, каждый вагон содержит четыре датчика скорости осей, для которых формируются и передаются по шине 22 данных соответственно сигналы BA-N и GA-N, то результирующий, переданный устройством управления 20 по шине 22 данных сигнал SD-12 остановки вагона имеет соответственно, в целом, ширину данных один байт. На каждом из четырех вагонов 12, 14, 16, 18 секции или транспортного средства предусмотрено соответствующее устройство управления 20, так что в этом примере для определения остановки по шине 22 данных передаются, в общей сложности, 4 байта, а именно сигналы SD-14, SD-16 и SD-18 остановки вагонов. Каждый из вагонов содержит далее устройство 24 определения остановки, которое подключено к шине 22 данных для их приема. Устройство 24 определения остановки может быть выполнено в виде аппаратного и/или программного обеспечения, например в виде программы и/или модуля. Соответственно показанные на фиг. 1 соединения для передачи данных могут быть выполнены в виде аппаратного и/или программного обеспечения, например в виде интерфейсов данных и/или программных интерфейсов или интерфейсов памяти.
Например, возможно, чтобы устройство 24 определения остановки было выполнено в виде отдельного устройства управления. Устройство 24 определения остановки может быть реализовано внутри электронного устройства управления 20 или как его часть. Как правило, устройство 24 определения остановки выполнено для приема сигналов SD-12, SD-14, SD-16, SD-18 остановки, происходящих от всех относящихся к секции и/или подключенных к шине данных вагонов. Понятно, что устройство 24 определения остановки может быть выполнено для приема локального сигнала остановки, например SD-12 для вагона 12, от соответствующего устройства управления 20, вместо того, чтобы считывать его с шины 22 данных. Далее устройство 24 определения остановки принимает сигналы VR и W, которые в этом примере могут передаваться устройством управления 20 на каждом вагоне на соответствующее устройство 24 определения остановки. Также возможно, чтобы опорные сигналы VR и W передавались на устройство 24 определения остановки в обход устройства управления 20. Устройство управления 20 и/или устройство 24 определения остановки могут быть реализованы как или как часть устройства управления торможением вагона. Устройство 24 определения остановки выполнено для определения на основе сигналов SD-12, SD-14, SD-16, SD-18 остановки и опорной скорости VR, находится ли транспортное средство в состоянии остановки. В целом, в данном примере для каждого устройства 24 определения остановки имеются 16 сигналов BA-N остановки оси и соответствующие сигналы GA-N действительности, которые закодированы в сигналы остановки и имеют соответственно ширину данных один бит. Для оценки того, находится ли транспортное средство в состоянии остановки, можно игнорировать охарактеризованные как недействительные сигналы остановки и/или, при необходимости, недействительную опорную скорость. На основе числа действительных сигналов остановки формируется пороговое значение. В зависимости от числа действительных сигналов остановки оно указывает, начиная с какого числа сигналов остановки осей, указывающих остановку, фактически принимается остановка. Может быть предусмотрено, что устройство 24 определения остановки выполнено для обнаружения остановки только тогда, когда опорная скорость ниже заданного опорного предельного значения, которое может составлять, например, 3-5 км/ч. Если число сигналов остановки осей, указывающих, что транспортное средство остановилось, меньше определенного порогового значения, то можно исходить из того, что транспортное средство не остановилось. Для этой оценки нет необходимости сравнивать опорную скорость с предельной скоростью. В частности, устройство 24 определения остановки может быть выполнено для повторного устранения состояния, в котором обнаруживается остановка, если число сигналов остановки осей падает ниже порогового значения.
Понятно, что система управления 10 может быть выполнена для непрерывного контроля скорости транспортного средства и, в частности, для регулярного формирования сигналов SD-12, SD-14, SD-16, SD-18 остановки и для контроля того, остановилось ли транспортное средство. Устройство 24 определения остановки может быть выполнено для формирования сигнала SI результата и сигнала SV действительности результата, которые указывают на то, остановилось ли транспортное средство и действителен ли сигнал остановки. Эти сигналы могут передаваться по шине. Также возможно, чтобы сигнал результата использовался локально в плоскости вагона. Например, сигнал результата может использоваться для управления открыванием дверей или функции открывания дверей и/или для диагностики неисправностей. Может быть также предусмотрено, что различные устройства транспортного средства или вагонные устройства, которые активируются при его остановке или движении, на основе сигнала результата активируются или деактивируются.
Признаки, раскрытые в предшествующем описании, на чертеже и в нижеследующей формуле изобретения, могут быть существенными для его реализации как по отдельности, так и в любой комбинации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводно-тормозной системой рельсового транспортного средства | 1989 |
|
SU1816271A3 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2524805C2 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| Устройство мониторинга рельсового транспортного средства | 2018 |
|
RU2721219C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2522532C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2392140C2 |
| Способ формирования результатов измерений на основании сигналов датчиков | 2014 |
|
RU2643746C2 |
| ИНТЕРАКТИВНАЯ ВНЕШНЯЯ СВЯЗЬ ТРАНСПОРТНОГО СРЕДСТВА С ПОЛЬЗОВАТЕЛЕМ | 2019 |
|
RU2750763C1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ОДНООСНОЙ ТЕЛЕЖКОЙ | 1997 |
|
RU2143356C1 |
| ШАРНИР ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ ИЛИ МОДУЛЕЙ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С ДАТЧИКОМ УГЛА | 2013 |
|
RU2608200C2 |
Изобретение относится к области железнодорожной автоматики и телемеханики для обнаружения остановки рельсового транспортного средства. Система содержит по меньшей мере одно устройство управления, которое подключено или выполнено с возможностью подключения для приема сигналов датчиков, причем сигналы датчиков представляют соответственно по меньшей мере одну скорость, по меньшей мере одно шинное присоединение, посредством которого устройство управления подключено или выполнено с возможностью подключения к шине данных рельсового транспортного средства для их обмена. Причем устройство управления выполнено с возможностью формирования на основе сигналов датчиков сигнала остановки и его передачи на шину данных; устройство определения остановки выполнено с возможностью приема по шине данных сигналов остановки и с возможностью определения на основе принятых по шине данных сигналов остановки, находится ли рельсовое транспортное средство в состоянии остановки. Достигается повышение надежности обнаружения остановки рельсового транспортного средства. 3 н. и 7 з.п. ф-лы, 1 ил.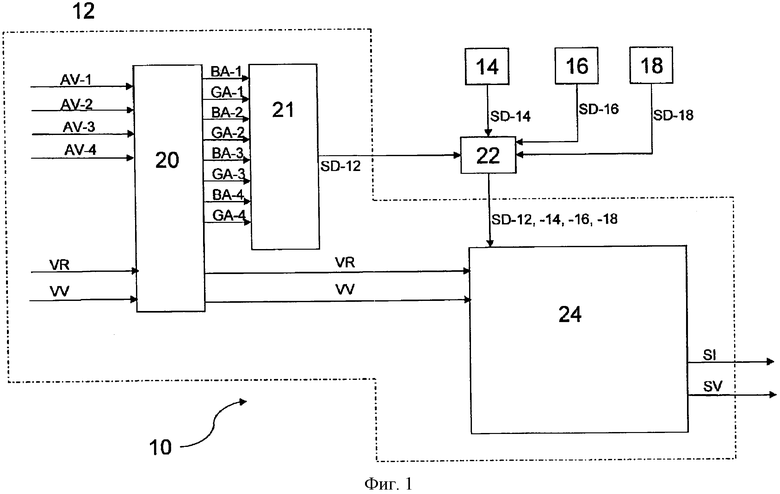
1. Система управления (10; 20, 24) рельсовым транспортным средством, содержащая
- по меньшей мере одно устройство управления (20), которое подключено или выполнено с возможностью подключения для приема сигналов (AV-1; AV-2; AV-3; AV-4) датчиков, причем сигналы (AV-1; AV-2; AV-3; AV-4) датчиков представляют соответственно по меньшей мере одну скорость;
- по меньшей мере одно шинное присоединение, посредством которого устройство управления (20) подключено или выполнено с возможностью подключения к шине (22) данных рельсового транспортного средства для их обмена,
- причем устройство управления (20) выполнено с возможностью формирования на основе сигналов (AV-1; AV-2; AV-3; AV-4) датчиков сигнала (SD-12) остановки и его передачи на шину (22) данных;
- устройство (24) определения остановки, выполненное с возможностью приема по шине (22) данных сигналов (SD-12, SD-14, SD-16, SD-18) остановки,
- причем устройство (24) определения остановки выполнено с возможностью определения на основе принятых по шине (22) данных сигналов (SD-12, SD-14, SD-16, SD-18) остановки, находится ли рельсовое транспортное средство в состоянии остановки.
2. Система по п. 1, в которой устройство управления (20) выполнено с возможностью приема сигналов (AV-1; AV-2; AV-3; AV-4) нескольких датчиков и формирования сигнала (SD-12, SD-14, SD-16, SD-18) остановки, который для нескольких представленных сигналами (AV-1; AV-2; AV-3; AV-4) датчиков скоростей содержит соответственно по меньшей мере одну информацию (BA-1, BA-2, BA-3, BA-4) об остановке.
3. Система по п. 1 или 2, в которой устройство управления (20) выполнено с возможностью проверки действительности каждого принятого сигнала (AV-1; AV-2; AV-3; AV-4) датчика.
4. Система по п. 1 или 2, в которой устройство управления (20) выполнено с возможностью формирования сигнала (SD-12, SD-14, SD-16, SD-18) остановки, который для каждой информации об остановке указывает ее действительность.
5. Система по п. 1 или 2, в которой устройство (24) определения остановки выполнено с возможностью приема сигнала (VR) опорной скорости.
6. Система по п. 5, в которой устройство (24) определения остановки выполнено с возможностью определения на основе сигнала (VR) опорной скорости, находится ли рельсовое транспортное средство в состоянии остановки.
7. Система по п. 1 или 2, которая выполнена с возможностью повагонного определения остановки рельсового транспортного средства.
8. Рельсовое транспортное средство с системой управления по любому из пп. 1-7.
9. Рельсовое транспортное средство по п. 8, содержащее несколько вагонов с электронным устройством управления (20) каждый, которые соединены между собой или выполнены с возможностью соединения посредством шины (22) данных.
10. Способ определения остановки рельсового транспортного средства, в частности рельсового транспортного средства по п. 8 или 9, в котором выполняют следующие этапы:
- формирование посредством по меньшей мере одного электронного устройства управления (20) соответственно сигнала (SD-12, SD-14, SD-16, SD-18) остановки на основе сигналов (SD-12, SD-14, SD-16, SD-18) остановки, представляющих соответственно по меньшей мере одну скорость;
- передачу посредством по меньшей мере одного электронного устройства управления (20) соответствующего сигнала (SD-12, SD-14, SD-16, SD-18) остановки на шину (22) данных;
- определение посредством по меньшей мере одного электронного устройства управления (20), находится ли транспортное средство в состоянии остановки, на основе принятых по шине (22) данных сигналов (SD-12, SD-14, SD-16, SD-18) остановки.
| Колосоуборка | 1923 |
|
SU2009A1 |
| EP 1473210 A1, 03.11.2004 | |||
| DE 102010061878 A1, 24.05.2012. | |||

