Изобретение относится к устройству контроля повреждений элементов ходовой части единиц подвижного состава, содержащему, по меньшей мере, один вибродатчик согласно ограничительной части п.1 формулы изобретения.
При движении единиц подвижного состава все большее значение приобретают системы контроля за ходовой частью. Во-первых, такие контрольные системы востребованы по соображениям безопасности и предусмотрены нормативами или инструкциями. В качестве примера можно указать следующие системы, которые требуются в европейских странах в соответствии с технической спецификацией для обеспечения возможности взаимодействия (TSI, официальный бюллетень Европейского союза) для высокоскоростных поездов:
- бортовые системы для обнаружения схода с рельсов,
- бортовые системы для обнаружения греющегося подшипника или опознавания повреждения подшипника,
- бортовые системы для опознавания неустойчивости или неисправности амортизаторов.
Во-вторых, системы контроля за ходовой частью применяются для диагностики и раннего опознавания поврежденных узлов, критических состояний и прочих неисправностей для проведения раннего, обусловленного состоянием технического обслуживания. Целями служит при этом обеспечение кратких простоев, повышенная степень использования конструктивных узлов и, следовательно, снижение затрат.
Так, например, в междугородном экспрессе применяется система опознавания неустойчивости хода, а в новых автоматических поездах метрополитена используется система обнаружения схода с рельсов. Общим для этих систем является то, что они сконструированы и применяются функционально раздельно. Каждая из этих систем обладает собственными датчиками.
Для опознавания неустойчивости обычно применяется один или несколько датчиков на раме ходовой тележки, которые измеряют поперечное ускорение (поперечно направлению движения х) в определенном диапазоне частот и вырабатывают тревожное сообщение в случае превышения предельной величины.
В DE 10145433 С2 и ЕР 1317369 описаны способ и устройство контроля повреждений элементов единицы подвижного состава, которые также основаны на измерении значений ускорения на консолях демпфера качки, закрепленных на кузове вагона. Направление детектирования датчиков ускорения является здесь параллельным направлению движения.
Пример, касающийся способа и устройства для обнаружения схода с рельсов, описан в документе DE 19953677. При этом сигналы измерения от датчика ускорения, установленного на осевом подшипнике, обрабатываются непосредственно. Замеренные величины ускорения дважды интегрируются и сопоставляются с предельной величиной. Направление детектирования простого датчика ускорения совпадает с направлением вертикальной оси (направление z) единицы подвижного состава. Согласно этому источнику могут также применяться датчики ускорения, которые по направлению детектирования одновременно ориентированы в направлении движения (направление х), поперечно направлению движения (направление y) и в направлении вертикальной оси (направление z). Такой датчик ускорения представляет собой так называемый многокомпонентный датчик, т.е. он состоит, по меньшей мере, из двух, в данном случае трех датчиков ускорения, каждый из которых выполняет измерение в одном направлении детектирования. Такие многокомпонентные датчики и приданные им устройства обработки являются относительно дорогостоящими.
Другая возможность для обнаружения схода с рельсов обеспечивается пневматическим контрольным прибором, основанным исключительно на пневматическом принципе. Основанием для такого контрольного устройства служит стандарт UIC541-9 «Устройства обнаружения схода с рельсов товарных вагонов». Прибор устанавливается на кузове товарного вагона и следит за вертикальными ускорениями. В качестве сенсорного элемента используется при этом пружинно-весовой вибратор, посредством которого, начиная с заданной предельной величины, открывается пневматический клапан.
Проблема при пользовании такими системами, в частности, в рамках функций: «опознавание неустойчивости» и «обнаружение схода с рельсов», состоит в высокой стоимости сенсорной техники, так как применяется множество отдельных датчиков на разных монтажных участках.
Поэтому задачей изобретения является такое усовершенствование устройства контроля повреждений элементов ходовой части единиц подвижного состава, при котором в нем применяется по возможности небольшое количество простых и дешевых датчиков при обеспечении полного контроля за элементами ходовой части. Наряду с экономией затрат за счет малого количества датчиков и, следовательно, обеспечением меньших затрат на кабельную разводку необходимо дополнительно снизить степень сложности технического оборудования.
Указанная задача решена согласно изобретению, охарактеризованного признаками п.1 формулы.
Изобретение основано на идее, заключающейся в использовании общей сенсорной техники для разных функций устройства контроля повреждений элементов ходовой части единиц подвижного состава, таких, как упомянутые выше функции: опознавание неустойчивости и обнаружение схода с рельсов. Датчики выполнены в виде вибродатчиков, которые способны производить детектирование в зависимости от их расположения согласно изобретению в направлении вертикальной оси единицы подвижного состава (направление z) и поперечно направлению движения (направление y) или в направлении движения (направление х). При этом согласно изобретению предусмотрено два варианта:
а) расположение, по меньшей мере, одного вибродатчика на раме ходовой тележки или же на подшипнике колесной пары оси ходовой тележки единицы подвижного состава таким образом, чтобы его направление детектирования содержало составляющую в направлении движения (направление х) или составляющую, перпендикулярную направлению движения (направление y), или одновременно составляющую, параллельную вертикальной оси (направление z) единицы подвижного состава;
б) применение вибродатчиков, предназначенных для подшипников колесной пары оси, из которых один вибродатчик расположен на одном подшипнике колесной пары оси таким образом, что его направление детектирования является параллельным направлению движения, а другой вибродатчик расположен на другом подшипнике колесной пары оси таким образом, что его направление детектирования является параллельным вертикальной оси единицы подвижного состава.
В варианте а) вследствие косого направления детектирования вибродатчика происходит векторное сложение значений ускорения в направлении z со значениями ускорения в поперечном и продольном направлениях (направления y, х). Замеренные значения ускорения представляют собой сумму векторных отдельных ускорений в направлениях z, y или в направлении z. Эти значения служат указанием на тенденцию, при которой ходовая часть находится в неустойчивом режиме движения или сошла с рельсов. Более выборочный контроль может дополнительно достигаться специфической частотной оценкой замеренных значений ускорения. Вибрации на разных пространственных осях проявляются в разных диапазонах частот. Так, при неустойчивом режиме отмечаются, как правило, более низкие частоты в поперечном и продольном направлениях, чем по вертикальной оси. При сходе с рельсов критерий контроля образуется составляющими более высокой частоты по вертикальной оси. В результате целенаправленной оценки разных диапазонов частот возможен выборочный контроль за неустойчивым режимом движения и сходом с рельсов.
Составляющая в указанных направлениях (направления х, y, z) присутствует всегда тогда, когда угол, образуемый направлением детектирования в соответствующей плоскости, лежит в пределах от 0 до 90 градусов, не включая предельные величины 0 и 90 градусов. Особо предпочтительно, чтобы угол, образуемый направлением детектирования, лежал в диапазоне 10-80 градусов.
В результате становится возможным охватить с помощью только одного вибродатчика соответственно два перпендикулярных между собой направления детектирования (направление z и направление y или направление z и направление х). Благодаря этому с помощью одного вибродатчика, установленного на ходовой тележке или оси, можно получить при контроле за поперечным и продольным ускорением данные о возможной неустойчивости, а при контроле за ускорением в направлении вертикальной оси можно получить одновременно данные о возможной предрасположенности к сходу с рельсов.
Благодаря применению одного вибродатчика на каждой ходовой тележке обеспечиваются минимальные затраты на изготовление, монтаж и кабельную разводку для вибродатчика.
Согласно варианту б) каждому подшипнику колесной пары оси ходовой тележки придан вибродатчик. При этом направления детектирования обоих вибродатчиков, расположенных с обеих сторон оси, перпендикулярны между собой, а именно в направлении движения (направление х) и в направлении вертикальной оси (направление z). Таким образом в результате обработки сигналов ускорения от вибродатчиков могут быть также выполнены функции: «обнаружение схода с рельсов» и «опознавание неустойчивости». Поскольку вибродатчики приданы подшипникам колесной пары, то одновременно могут контролироваться и осевые подшипники, так как чрезмерные вибрации в зоне подшипников колесной пары указывают на наличие дефектов в этой зоне.
На другой оси ходовой тележки предусмотрено такое же расположение, но предпочтительно зеркальное по отношению к направлениям детектирования. Таким образом создается одинаковое направление детектирования, если смотреть по диагонали на оси ходовой тележки. Следовательно, на каждую ходовую тележку приходится по два вибродатчика с одинаковым направлением детектирования и, следовательно, достигается избыточность для соответствующего направления детектирования.
В результате по сравнению с решением, в котором подшипнику колесной пары придан двухкомпонентный датчик в виде комбинированного вибродатчика для двух направлений детектирования, как это описано, например, в документе DE 19953677 C1, достигается более высокое качество контроля за элементами ходовой части, так как контролируется каждый подшипник колесной пары. Кроме того необходимые при этом расходы не являются высокими, поскольку каждому подшипнику колесной пары придан только один вибродатчик.
Наряду с указанными контрольными функциями: опознавание неустойчивости и обнаружение схода с рельсов, с помощью устройства согласно изобретению могут выполняться и другие функции по контролю и диагностике с использованием соответствующих способов обработки и соответствующего электронного блока обработки. Так, при расположении датчиков на раме ходовой тележки становится возможным контролировать расположенные непосредственно на этой раме элементы, такие, как приводной рычаг, направляющие втулки, или саму раму.
В частности, при установке вибродатчика непосредственно на подшипнике колесной пары или его корпусе возможны дополнительные функции контроля и диагностики, как, например, опознавание выбоин, повреждений подшипников или обнаружение повреждений вала колесной пары или самого колеса.
Благодаря приведенным в зависимых пунктах формулы изобретения мерам возможны оптимальные варианты развития и усовершенствования изобретения по этим зависимым пунктам.
Особо предпочтительно, чтобы в варианте а) направление детектирования вибродатчика проходило в плоскости перпендикулярно оси ходовой тележки и образовывало с вертикальной осью (направление z) и с параллельной направлению движения осью (направление х) угол в 45 градусов. Поскольку в этом случае составляющие имеют одинаковые величины, то формируются предпочтительно соразмерные сигналы для продольных и вертикальных вибраций ходовой тележки или подшипников колесной пары.
В качестве альтернативы направление детектирования вибродатчика может проходить в плоскости перпендикулярно направлению движения и образовывать угол 45 градусов с вертикальной осью (направление z) и с перпендикулярной к направлению движения осью (направление y). В этом случае формируются соразмерные сигналы для поперечных и вертикальных вибраций ходовой тележки или подшипников колесной пары.
Особо предпочтительно, чтобы при усовершенствовании варианта а) вибродатчик располагался только на одном из обоих подшипников оси колесной пары. Если направление детектирования такого вибродатчика проходит в плоскости перпендикулярно оси и образует с вертикальной осью, а также с параллельной направлению движения осью предпочтительно угол в 45 градусов, то становится также возможным получить из сигнала измерения вибродатчика соразмерные данные о предрасположенности к сходу с рельсов и об устойчивости ходовой части. Если, например, два таких вибродатчика расположить по диагонали относительно вертикальной оси вращения ходовой тележки, то дополнительно достигается избыточность измерения, что повышает надежность контрольного устройства.
В этом варианте выполнения вибродатчик предпочтительно применять в комбинации с импульсным датчиком. Применение встроенных датчиков, формирующих сигналы для электронного блока обработки и регистрирующих дополнительно частоту вращения оси, например, для защиты от скольжения, дополнительно снижает затраты на установку датчиков и кабельную разводку.
С целью минимизации затрат на изготовление и монтаж, а также на кабельную разводку при усовершенствовании варианта б) на каждом подшипнике колесной пары оси устанавливается только один вибродатчик. Такие вибродатчики предпочтительно устанавливать на подшипниках колесной пары осей ходовой тележки таким образом, чтобы, если смотреть в направлении движения, направления детектирования вибродатчиков чередовались на каждой стороне единицы подвижного состава. Следовательно, по отношению к вертикальной оси ходовой тележки вибродатчики с одинаковым направлением детектирования будут располагаться по диагонали. Благодаря этому достигается оптимальная избыточность, повышающая надежность контрольного устройства в отношении выхода из строя.
Предпочтительно, чтобы в этом варианте выполнения, по меньшей мере, один вибродатчик применялся в комбинации с импульсным датчиком, что гарантирует указанные выше преимущества. Дополнительно в комбинированный датчик может быть встроен также датчик для измерения мгновенной температуры подшипника колесной пары. Указание о возможности такого выполнения комбинированного датчика содержится в документе DE 102005010118.
Следует учесть, что, по меньшей мере, один электронный блок обработки устройства контроля за повреждениями элементов ходовой части может служить неотъемлемой составной частью системы защиты от скольжения и/или системы управления торможением единицы подвижного состава, что также раскрыто в документе DE 102005010118.
Более точные сведения приводятся в нижеследующем описании вариантов выполнения.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - вид сверху ходовой тележки с частью устройства контроля повреждений элементов ходовой части единиц подвижного состава согласно первому варианту выполнения изобретения, схематично;
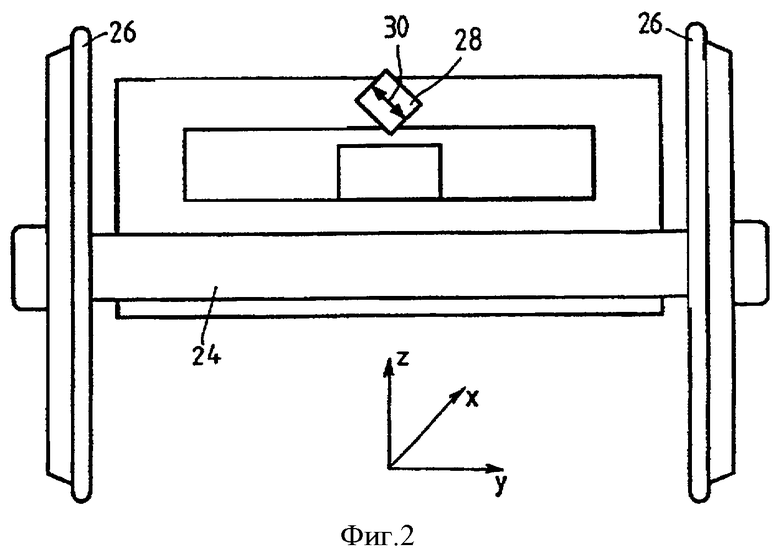
фиг.2 - вид спереди ходовой тележки по фиг.1;
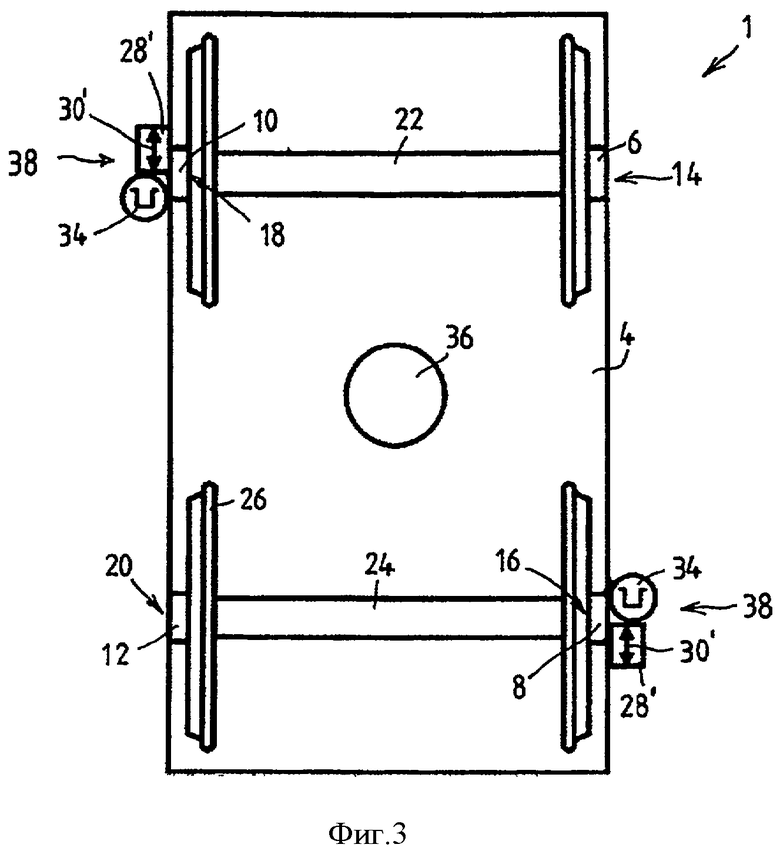
фиг.3 - вид сверху ходовой тележки с частью устройства контроля повреждений элементов ходовой части единиц подвижного состава согласно другому предпочтительному варианту выполнения изобретения;
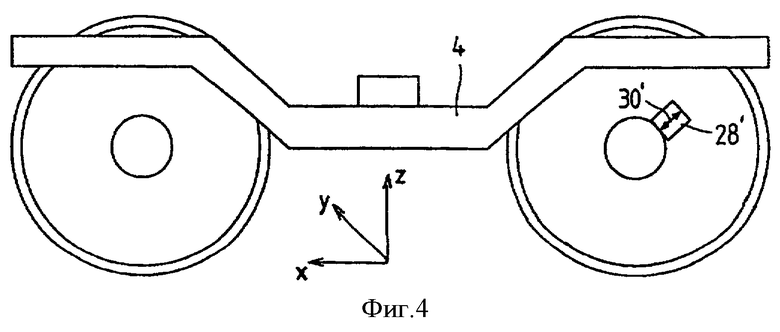
фиг.4 - вид спереди ходовой тележки по фиг.3;
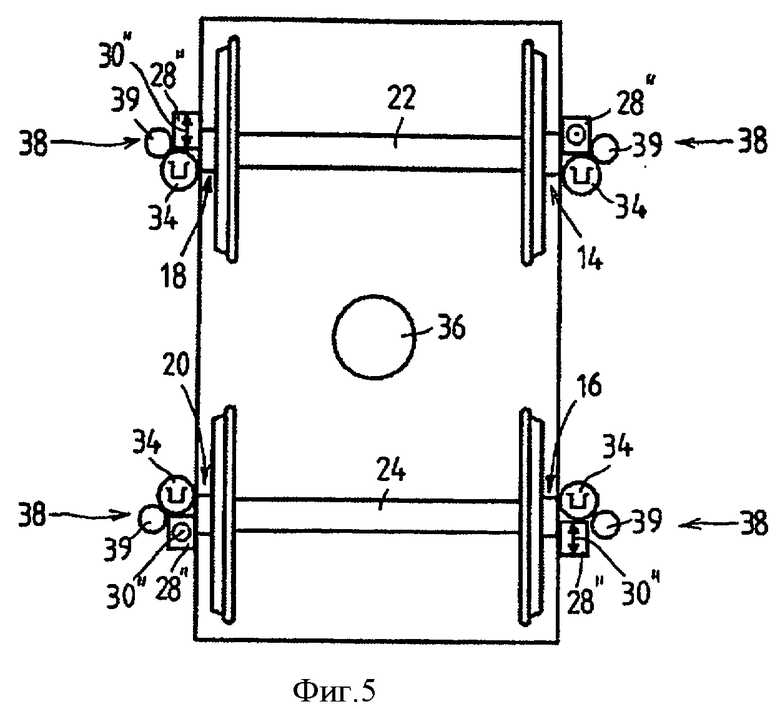
фиг.5 - вид сверху ходовой тележки с частью устройства контроля повреждений элементов ходовой части единиц подвижного состава согласно еще одному предпочтительному варианту выполнения изобретения;
фиг.6 - вид спереди ходовой тележки по фиг.5;
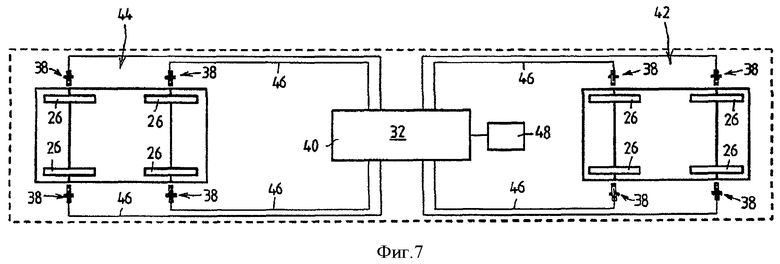
фиг.7 - электрическая схема устройства контроля повреждений элементов ходовой части единиц подвижного состава согласно варианту выполнения по фиг.5 и 6;
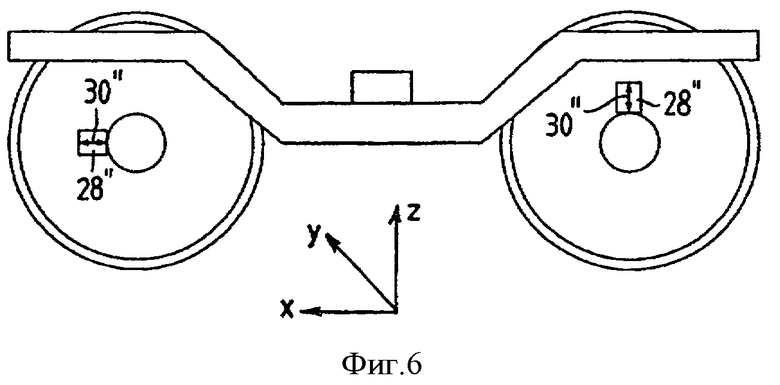
На фиг.1 схематично показан вид сверху ходовой тележки 1 с частью устройства 2 контроля повреждений элементов ходовой части единиц подвижного состава согласно первому варианту выполнения изобретения.
Ходовая тележка 1 установлена с возможностью поворота вокруг вертикальной оси 36 по отношению к не показанному кузову вагона и содержит раму 4, опирающуюся на кузов вагона посредством рессорной системы, которая также не показана, так как для изобретения имеет второстепенное значение.
Рама 4 ходовой тележки опирается, с другой стороны, через первичное рессорное подвешивание на четыре корпуса 6, 8, 10, 12 подшипников колесной пары, в которых размещено по одному подшипнику 14, 16, 18, 20 колесной пары для опоры оси 22, 24, несущей на концах два колеса 26. В целом ходовая тележка 1 содержит две оси 22, 24.
Для контроля за ходовой тележкой 1 и ее составными частями 4-20 предусмотрено устройство 2, из которого на фиг.1 и 2 показан только вибродатчик 28.
Вибродатчик 28 установлен на раме 4 ходовой тележки таким образом, что его, показанное стрелкой 30 направление детектирования, содержит составляющую, параллельную вертикальной оси (направление z), и составляющую в направлении движения (направление х) или составляющую, перпендикулярную направлению движения (направление y) единицы подвижного состава. Предпочтительно, чтобы направление 30 детектирования, например, вибродатчика 28, показанного в виде датчика ускорения, содержало составляющую, перпендикулярную направлению движения (направление y) и одновременно составляющую, параллельную вертикальной оси (направление z) единицы подвижного состава, как это показано, в частности, на фиг.2.
Тогда вследствие косого направления 30 детектирования вибродатчика 28 произойдет векторное сложение величин ускорения в направлении z с величинами ускорения в направлении y (поперечное направление). Моментальные значения ускорения в направлении z и направлении y рассчитываются показанным на фиг.7 электронным блоком 32 обработки на основе сигналов измерения от вибродатчика 28 и образуют величину, характеризующую тенденцию ходовой тележки к сходу с рельсов (сигнал измерения в направлении z) и/или к неустойчивым режимам движения, таким, как чрезмерная качка (сигнал измерения в направлении y).
Кроме того, каждой оси 22, 24 придан известный импульсный датчик 34 для измерения частоты вращения, расположенный предпочтительно в соответствующем корпусе 6, 8 подшипника колесной пары или же прифланцованный к нему своим корпусом.
Особо предпочтительно, чтобы согласно варианту выполнения по фиг.1, 2 направление 30 детектирования вибродатчика 28 проходило в плоскости перпендикулярно направлению движения (направление х) и образовывало с вертикальной осью (направление z) и с параллельной направлению движения осью (направление y) угол предпочтительно в 45 градусов. Поскольку в этом случае составляющие имеют одинаковые величины в направлении к этим осям, то образуются предпочтительно соразмерные сигналы для поперечных и вертикальных вибраций ходовой тележки 1.
В качестве альтернативы направление 30 детектирования вибродатчика 28 может проходить в плоскости перпендикулярно оси 22, 24 ходовой тележки и образовывать с вертикальной осью (направление z) и с направлением движения (направление х) угол, равный предпочтительно 45 градусам. В этом случае формируются соразмерные сигналы для продольных и вертикальных вибраций ходовой тележки 1.
Согласно варианту выполнения по фиг.3, 4 на одном подшипнике 16, 18 из обоих подшипников 16, 20 или 14, 18 колесной пары оси 22, 24 установлен вибродатчик 28'. В том случае, когда направления 30' детектирования обоих вибродатчиков 28' совпадают, проходят в плоскости перпендикулярно осям 22, 24 ходовой тележки 1 и образуют с вертикальной осью (направление z) и с расположенной параллельно направлению движения осью (направление х) угол предпочтительно в 45 градусов, то становится возможным получить на основании сигналов измерения вибродатчиков 28' соразмерные данные о предрасположенности к сходу с рельсов и об устойчивости ходовой части. Особо предпочтительно, чтобы, как показано на фиг.3, оба вибродатчика 28', предназначенных для осей 22, 24, располагались по диагонали относительно вертикальной оси вращения 36 ходовой тележки 1. В этом варианте выполнения вибродатчики 28' объединены дополнительно с импульсным датчиком 34 для измерения скорости вращения колеса с образованием встроенного комбинированного датчика 38.
В варианте выполнения по фиг.5 и 6 для каждого подшипника 14-20 колесной пары ходовой тележки 1 предназначен вибродатчик 28'', при этом вибродатчик 28'' установлен на подшипнике 16 или 18 колесной пары соответствующей оси 24, 22 таким образом, что его направление детектирования 30'' является параллельным направлению движения (направление х), при этом другой вибродатчик 28'' расположен на другом подшипнике 14 или 20 колесной пары соответствующей оси 22, 24 так, что его направление 30'' детектирования параллельно вертикальной оси (направление z) единицы подвижного состава, В соответствии с этим направления 30'' детектирования обоих, предназначенных для оси 22, 24 ходовой тележки 1 вибродатчиков 28'' являются перпендикулярными между собой и совпадают с направлением движения (направление х) и вертикальной осью (направление z). Поэтому вибродатчики 28'' с одинаковым направлением 30'' детектирования предпочтительно располагать по диагонали относительно оси 36 вращения ходовой тележки 1.
Предпочтительно, чтобы и в этом варианте выполнения, по меньшей мере, один вибродатчик 28'' применялся в комбинации с импульсным датчиком 34 в виде комбинированного датчика 38, чем достигаются указанные выше преимущества. Дополнительно может быть также встроен в комбинированный датчик 38 датчик 39 для измерения моментальной температуры соответствующего подшипника 14-20 колесной пары.
Во всех вариантах выполнения применяются предпочтительно только простые, т.е. действующие лишь в одном направлении 30, 30', 30'' детектирования вибродатчики 28, 28', 28'' одного типа.
На фиг.7 показан электронный блок 32 обработки для устройства 2, встроенный в электронный блок 40 защиты от скольжения, относящийся к системе защиты от скольжения, служащей для задания оптимального проскальзывания между колесами пассажирского вагона с двумя ходовыми тележками 42, 44 и рельсами при скорости движения до 200 км/ч и соединенный сенсорными линиями 46 с соответствующими комбинированными датчиками 38, установленными на подшипниках колесных пар, для передачи сигналов. Пассажирский вагон оборудован расположенным предпочтительно на каждом подшипнике колесной пары комбинированным датчиком 38 для измерения скорости вращения колес (импульсный датчик), температуры колесных подшипников (датчики температуры) и ускорения колес в соответствующем направлении 30'' детектирования (простой датчик ускорения). Замеренные этими датчиками 38 сигналы вводятся в центральный электронный блок 32 обработки и обрабатываются в нем. В целом комбинированными датчиками 38 могут выполняться следующие контрольные функции:
- контроль за качением (опознавание не вращающихся колес),
- обнаружение греющихся подшипников (контроль за температурой подшипников колесной пары),
- опознавание повреждения подшипника путем измерения вибрации,
- опознавание неустойчивости хода или неисправности амортизаторов ходовой части,
- обнаружение схода с рельсов,
- обнаружение выбоин и некруглости колес.
Кроме того возможны дополнительные диагностические функции для раннего опознавания дефектных деталей. Не последнюю роль играет также диагностика участка железнодорожного пути с целью обнаружения его дефектов. Через устройство 40 ввода-вывода может производиться ввод или вывод данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПОВРЕЖДЕНИЙ ЭЛЕМЕНТОВ ХОДОВОЙ ЧАСТИ ЕДИНИЦ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2460658C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2392140C2 |
| СПОСОБ МАКЕТНОГО МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПО РЕЛЬСОВОМУ ПУТИ И КОНСТРУКЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2570477C2 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2513338C1 |
| СПОСОБ КОНТРОЛЯ КРИТИЧЕСКОГО СОСТОЯНИЯ ПОДВИЖНОГО СОСТАВА НА РЕЛЬСОВОМ ПУТИ И РЕГИСТРАЦИИ ЕГО СХОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399524C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 1997 |
|
RU2134319C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ АКТИВНОЙ ХОДОВОЙ ЧАСТИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2422312C2 |
| ДЕФЕКТОСКОПНОЕ ПЕРЕДВИЖНОЕ СРЕДСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2001 |
|
RU2228870C2 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ГРУЗОВОГО ВАГОНА | 2019 |
|
RU2716392C1 |
Изобретение относится к устройству (2) контроля повреждений элементов ходовой части единиц подвижного состава, содержащему, по меньшей мере, один вибродатчик (28, 28', 28''). Согласно варианту выполнения изобретения предусмотрено, что, по меньшей мере, один вибродатчик (28, 28') установлен на раме (4) ходовой тележки или на подшипнике (14-20) колесной пары оси (22, 24) ходовой тележки (1) единицы подвижного состава, при этом его направление (30, 30') детектирования содержит составляющую в направлении движения (направление x) или составляющую, перпендикулярную направлению движения (направление y), и одновременно составляющую, параллельную вертикальной оси (направление z) единицы подвижного состава. В результате обеспечивается полный контроль за элементами ходовой части при снижении степени сложности технического оборудования. 7 з.п. ф-лы, 7 ил.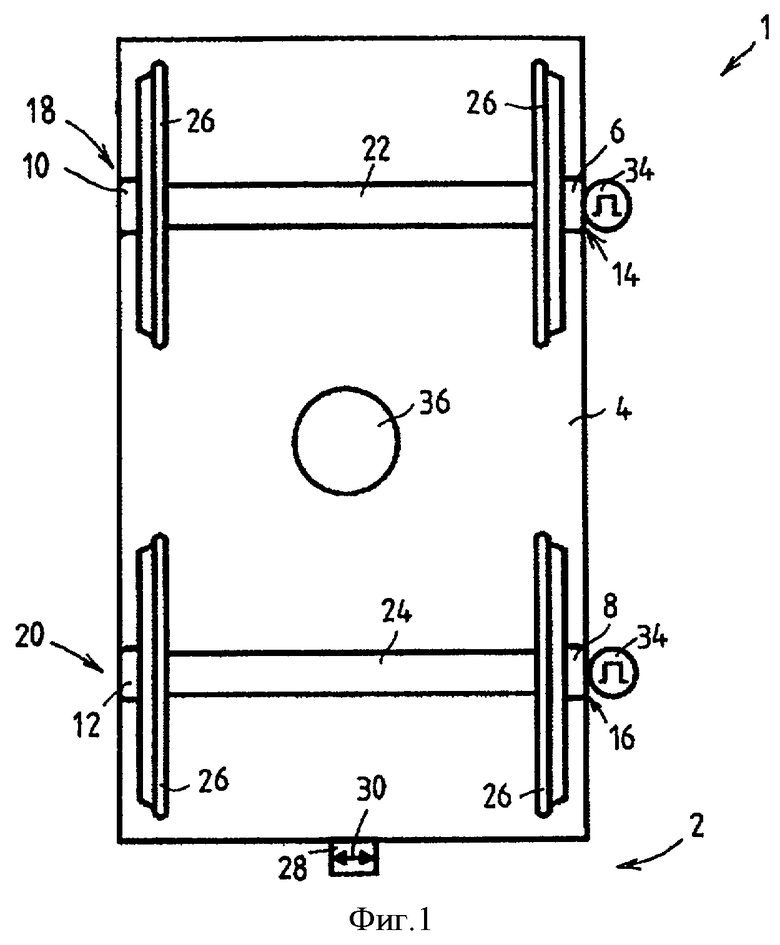
1. Устройство (2) контроля повреждений элементов ходовой части единиц подвижного состава, содержащее, по меньшей мере, один вибродатчик (28, 28', 28''), отличающееся тем, что
а) по меньшей мере, один вибродатчик (28, 28') установлен на раме (4) ходовой тележки или на подшипнике (14-20) колесной пары оси (22, 24) ходовой тележки (1) единицы подвижного состава, при этом его направление (30, 30') детектирования содержит составляющую в направлении движения (направление x) или составляющую, перпендикулярную направлению движения (направление y), и одновременно составляющую, параллельную вертикальной оси (направление z) единицы подвижного состава, причем
а1) направление (30') детектирования вибродатчика (28') проходит в плоскости перпендикулярно оси (22, 24) ходовой тележки (1) и образует с вертикальной осью (направление z) и с параллельной направлению движения осью (направление x) угол в диапазоне от 10 до 80°, или
а2) направление (30) детектирования вибродатчика (28) проходит в плоскости перпендикулярно направлению движения (направлению х) и образует с вертикальной осью (направление z) и с перпендикулярной направлению движения осью (направление y) угол в диапазоне от 10 до 80°, или
б) содержит вибродатчики (28''), предназначенные для подшипников (14-20) колесной пары оси (22, 24), из которых один вибродатчик (28'') установлен на одном подшипнике (16 или 18) колесной пары оси (22, 24), при этом его направление (30'') детектирования является параллельным направлению движения (направление х), а другой вибродатчик (28'') установлен на другом подшипнике (14 или 20) колесной пары оси (22, 24) и его направление (30'') детектирования является параллельным вертикальной оси (направление z) единицы подвижного состава.
2. Устройство по п.1, отличающееся тем, что на раме (4) ходовой тележки (1) расположен один вибродатчик (28).
3. Устройство по п.1, отличающееся тем, что вибродатчик (28') расположен на одном подшипнике (16, 18) из подшипников (14-20) колесной пары оси (22, 24) ходовой тележки (1).
4. Устройство по п.1, отличающееся тем, что на каждом подшипнике (14-20) колесной пары оси (22, 24) установлен один вибродатчик (28'').
5. Устройство по п.4, отличающееся тем, что вибродатчики (28'') расположены на подшипниках (14-20) колесной пары осей (22, 24) ходовой тележки (1), причем при рассмотрении в направлении движения (направление х) направления (30'') детектирования вибродатчиков (28'') чередуются на каждой стороне единицы подвижного состава.
6. Устройство по любому из пп.1-5, отличающееся тем, что, по меньшей мере, один вибродатчик (28, 28', 28'') выполнен в виде датчика ускорения и при этом совместно, по меньшей мере, с одним датчиком (34) для измерения моментальной скорости вращения колеса и/или с одним датчиком (39) для измерения моментальной температуры подшипника (14-20) колесной пары встроен в комбинированный датчик (38).
7. Устройство по любому из пп.1-5, отличающееся тем, что в состав системы защиты от скольжения и/или системы управления торможением единицы подвижного состава входит в качестве составной части, по меньшей мере, один электронный блок (32) обработки устройства (2).
8. Устройство по любому из пп.1-5, отличающееся тем, что, по меньшей мере, некоторые из вибродатчиков (28, 28', 28'') присутствуют в избытке.
| US 6672681 B1, 06.01.2004 | |||
| DE 19953677 C1, 21.06.2001 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| МНОГОФАКТОРНЫЙ СПОСОБ ДИАГНОСТИРОВАНИЯ РОТОРНЫХ, МЕХАНИЧЕСКИХ, ПОДШИПНИКОВЫХ И РЕДУКТОРНЫХ УЗЛОВ | 2004 |
|
RU2284021C2 |
| СТЕНД ДИНАМИЧЕСКОГО КОНТРОЛЯ | 2002 |
|
RU2225601C2 |

