Устройство относится к области радиолокации, а в частности к конструкции самолета, позволяющей улучшить размещение антенн.
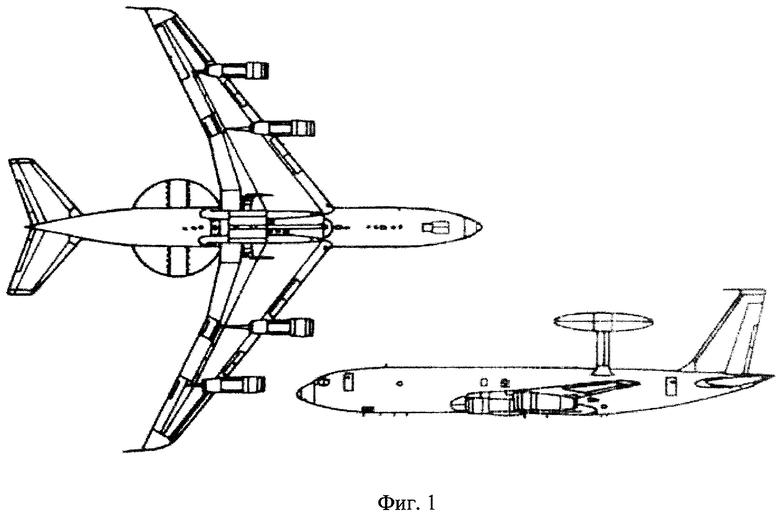
Наиболее распространенной конструкцией самолета дальнего радиолокационного обнаружения (ДРЛО) является схема с размещением антенны в «грибе» над фюзеляжем. Такой самолет, Е3 системы АВАКС, изображен на Фиг.1 [Военная авиация. Кн.1, Минск: Попурри, 1999].
Недостатками такой схемы являются:
- «гриб» ухудшает аэродинамику самолета;
- площадь антенны, размещаемой в «грибе», оказывается недостаточной для обнаружения целей на дальностях, соответствующих дальности радиогоризонта;
- хвостовой киль затеняет сектор в задней полусфере и не позволяет получить круговой обзор;
- антенна и «гриб» вращаются механически, что увеличивает массу оборудования, снижая длительность патрулирования.
Прототипом предлагаемого устройства является более новый самолет ДРЛО с РЛС PHALCON [Военная авиация. Кн.1. Минск: Попурри, 1999, стр.505], который имеет антенну в виде нескольких прямоугольных активных фазированных антенных решеток (ФАР). В зависимости от проекта таких ФАР может быть от 3 до 6. Размещение боковых антенн РЛС, изображенных в виде прямоугольников, показано на Фиг.2. Недостатком этой схемы является то, что в качестве носителя использован тот же самолет Боинг-707, что и у АВАКСа. В результате:
- расположение крыла в середине фюзеляжа не позволяет разместить антенну вдоль всего борта носителя, т.е. антенна имеет примерно ту же площадь, что и антенна РЛС АВАКС;
- из-за наличия крыла в середине корпуса и двигателей, расположенных на крыле, передняя боковая антенна может сканировать лучом только в передней полусфере и малой части задней полусферы (все углы, упоминаемые в данной заявке, отсчитываются в системе координат, связанной с корпусом самолета). При приближении луча к крылу и двигателям луч искажается, и работа РЛС становится невозможной. В результате, для обзора остальной части задней полусферы, сзади крыла устанавливается вторая антенна, что увеличивает массу РЛС;
- округлость формы фюзеляжа не позволяет разместить на нем антенну требуемой высоты. В результате ширина луча в вертикальной плоскости оказывается ≈8°. При обнаружении целей на дальностях 500-700 км размер луча по высоте оказывается равным 60-100 км. Учитывая то, что высота полета целей не превосходит, как правило, 12-15 км, получаем, что большая часть энергии в луче излучается напрасно, так как облучает пространство, в котором цели отсутствуют. В итоге, дальность обнаружения типовой цели снижается до ≈300 км.
Целью изобретения является увеличение дальности обнаружения и уменьшение массы самолета.
Поставленная цель достигается тем, что вместо гражданского носителя используется специализированный, форма которого позволяет размещать антенны, площадь которых максимально приближена к площади соответствующей поверхности фюзеляжа. Для этого боковые поверхности фюзеляжа выполнены плоскими, а крыло разделено на два, и одно из крыльев установлено в передней верхней, а второе в задней верхней части фюзеляжа. Для того чтобы переднее крыло не затеняло сектор обзора боковой антенны, оно имеет обратную стреловидность.
Максимизация площади боковой антенны произведена за счет занятия почти всей боковой поверхности фюзеляжа. При этом крайние части антенн оказываются под крыльями, что позволяет использовать их только при сканировании нижней полусферы, при сканировании верхней полусферы они отключаются.
На Фиг.1 изображен общий вид самолета АВАКС, на Фиг.2 - самолета PHALCON, на Фиг.3 - виды сверху, сбоку и спереди предлагаемого самолета, где:
1 - фюзеляж
2 - переднее крыло
3 - заднее крыло
4 - левая боковая антенна
5 - передняя антенна
6 - правая боковая антенна
7 - задняя антенна
8 - киль
9 - двигатели.
На Фиг.4 приведена функциональная блок-схема РЛС, где
4 - левая боковая антенна
5 - передняя антенна
6 - правая боковая антенна
7 - задняя антенна
10 - блок управления лучами антенн
11 - приемно-формирующий блок
12 - коммутаторы.
Предлагаемый самолет состоит из фюзеляжа 1 и двух крыльев 2 и 3 (Фиг.3). Крыло 2 установлено в носовой части, а крыло 3 в хвостовой части самолета. Переднее крыло имеет обратную стреловидность, а заднее нормальную стреловидность. Крылья отклонены от фюзеляжа вверх на угол, превышающий ширину луча антенны по углу места.
В фюзеляже установлены четыре антенны - две боковые 4 и 6, передняя 5 и задняя 7. На фюзеляже находится киль 8 и двигатели 9.
Каждая боковая антенна имеет прямоугольную форму и разделена вдоль фюзеляжа на три части: две крайние находятся под крыльями, а средняя часть - в свободной от крыльев части фюзеляжа. Каждая из частей является самостоятельной активной ФАР. ФАР состоят из приемо-передающих модулей, которые работают или на прием, или на передачу. Блок-схема подключения ФАР к остальным блокам РЛС изображена на Фиг.4.
Все три части боковых ФАР имеют единую систему управления лучом 10 и приемо-формирующий блок. 11, к которому средние части подключены непосредственно, а крайние - через коммутатор 12.
Боковые поверхности фюзеляжа наклонены под углом 5°÷10° от вертикали (Фиг.3, вид спереди), что обеспечивает улучшенный обзор нижней полусферы, в которой находится большинство обнаруживаемых целей. Передняя кромка переднего крыла и задняя кромка заднего крыла отклонены от строительной оси фюзеляжа на угол 45°÷60° (Фиг.3, вид сверху), что обеспечивает круговое сканирование при использовании всех четырех антенн.
Для того чтобы при установке луча на угол места, равный 0°, можно было бы использовать все три части боковой антенны, крылья отклонены от горизонтали вверх на угол, превышающий ширину луча антенны РЛС по углу места (Фиг.3, вид спереди).
Наилучшие технико-экономические характеристики получаются при беспилотном исполнении самолета. Операторы управляют полетом и работой РЛС по линии связи с наземного командного пункта. Передача информации на приемник командного пункта производится той антенной РЛС, в зоне действия которой находится командный пункт. Для этого блок управления 10 выделяет специальный интервал времени в циклограмме работы РЛС. Такой способ передачи информации обеспечивает высокую помехоустойчивость за счет направленности антенн и высокой мощности передатчиков.
При работе РЛС все 4 антенны работают независимо. Каждая антенна сканирует азимутальный сектор ±(45-60)°, чем обеспечивается круговой обзор. Из-за кривизны земли наиболее удаленные воздушные цели находятся в нижней полусфере. При полете вдоль границ наиболее важным является осмотр бокового сектора, поэтому для примера рассмотрим работу боковой антенны. Каждая из трех частей антенны является самостоятельной активной ФАР. Входные сигналы, принятые каждым приемопередающим модулем ФАР, суммируются внутри каждой ФАР и с выхода каждой ФАР подаются на 3 отдельных входа приемо-формирующего блока 11. Данный блок является типовым многоканальным приемником. Кроме того, в блоке 11 находится формирователь излучаемого сигнала. Излучаемый сигнал подается с выхода блока 11 на входы всех трех ФАР боковой антенны. Команды на включение ФАР и управления лучом поступают с выхода блока 10. При сканировании лучи всех трех ФАР перемещаются параллельно, а в пространстве образуется единый луч, идентичный лучу неразделенной боковой антенны. При приеме сигналы трех ФАР суммируются внутри блока 11, образуя аналогичный суммарный луч.
Во время сканирования нижней полусферы коммутаторы 12 размыкаются и крайние ФАР перестают работать, а луч образует только средняя ФАР. Таким образом, луч этой части боковой ФАР проходит мимо крыла, не задевая его и не искажаясь.
Дальность обнаружения цели при отключении крайних ФАР уменьшается. Уменьшение считается допустимым, так как в верхней полусфере из-за кривизны земли цели появляются на меньших дальностях, чем в нижней.
Передняя и задняя ФАР работают аналогично средней части боковой ФАР, то есть без коммутации.
Самолет Боинг - 707 PHALCON при массе 150-160 т имеет боковую антенну площадью ≈10 м2. Длина самолета равна 42 м, средний диаметр фюзеляжа 3,5 м, экипаж 15 человек.
Предположим, что для получения качественно новых дальностей обнаружения требуется иметь боковую антенну площадью 40 м2, например 16·2,5 м. Тогда предлагаемый самолет будет иметь фюзеляж длиной 20-21 м, высотой 3-3,5 м, шириной 2-2,5 м. Учитывая отсутствие необходимости, для беспилотного самолета, герметизировать кабину, массу самолета можно оценить в 50 т. При указанной высоте самолета высота антенны окажется не менее 2,5 м, и луч в вертикальной плоскости сузится в 1,5-1,6 раза. В результате, при одинаковой излучаемой мощности, дальность обнаружения возрастет в 1,6 раза. Увеличение размеров антенны позволяет уменьшить ширину луча и уровень боковых лепестков, что повышает помехозащищенность РЛС.
В боевых условиях самолеты ДРЛО летают под охраной истребителей. Повышение дальности обнаружения и беспилотное исполнение позволяет для предлагаемого самолета отказаться от охраны, что дополнительно существенно уменьшает эксплуатационные расходы.
Производство и эксплуатация беспилотного самолета массой 50 т должна обходиться в 3-5 раз дешевле, чем для прототипа. Такие показатели позволят организовать его серийное производство, что окупит затраты на разработку.
Промышленная реализуемость обеспечивается тем, что самолет изготавливается по тем же технологиям, что и прототип, с изменением только формы. Крыло с обратной стреловидностью известно давно и используется, например, в самолете Су-37. Возможность последовательной установки двух крыльев также подтверждается формой Су-37, где большое хвостовое оперение можно рассматривать как второе крыло. Уменьшенная крейсерская скорость самолета облегчает, по сравнению с прототипом, решение аэродинамических задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ ДАЛЬНЕГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 2012 |
|
RU2499730C1 |
| Самолет дальнего радиолокационного обнаружения | 2023 |
|
RU2824829C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ С ПОНИЖЕННОЙ РАДИОЛОКАЦИОННОЙ ЗАМЕТНОСТЬЮ | 2011 |
|
RU2502643C2 |
| ОКЕАНИЧЕСКАЯ СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНАЯ | 2021 |
|
RU2753818C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ | 2023 |
|
RU2807624C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПОСЛЕ ПУСКА УПРАВЛЯЕМОЙ РАКЕТЫ | 2004 |
|
RU2269452C2 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2234714C2 |
| СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНО-ПОРАЖАЮЩАЯ | 2020 |
|
RU2753779C1 |


Изобретение относится к области радиолокации. Самолет дальнего радиолокационного обнаружения имеет два крыла, которые установлены в верхней части фюзеляжа. Переднее крыло установлено в носовой части фюзеляжа и имеет обратную стреловидность. Заднее крыло установлено в хвостовой части и имеет нормальную стреловидность, вследствие чего боковые антенны могут занимать большую часть боковых поверхностей фюзеляжа. Достигается повышение дальности обнаружения, точности измерения и помехозащищенности, при одновременном снижении массы носителя. 2 з.п. ф-лы, 4 ил.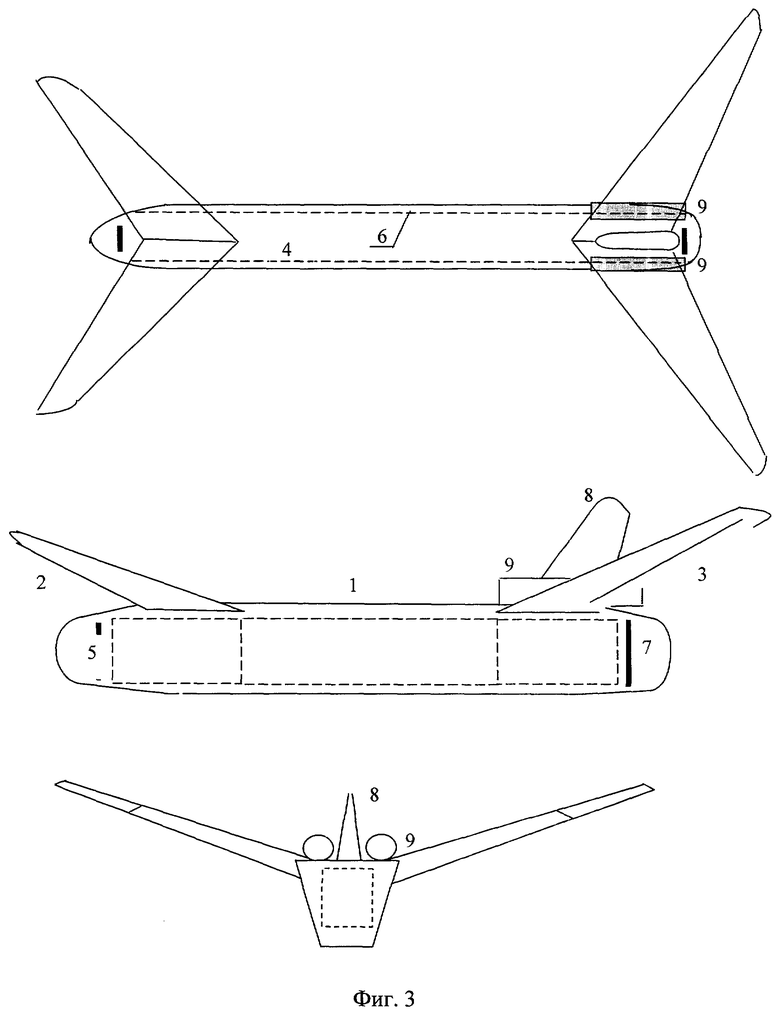
1. Самолет дальнего радиолокационного обнаружения, состоящий из фюзеляжа, крыльев и радиолокатора с активными фазированными антенными решетками, отличающийся тем, что в верхней части фюзеляжа устанавливают два крыла, одно из которых в передней части фюзеляжа имеет обратную стреловидность, а второе, в задней части фюзеляжа, имеет нормальную стреловидность.
2. Самолет по п.1, отличающийся тем, что, крылья отклонены вверх на угол, превышающий ширину луча антенны.
3. Самолет по п.2, отличающийся тем, что боковые антенны разделены на три части так, что крайние части находятся под крыльями, а средняя часть - в свободной от крыльев части фюзеляжа, причем средняя часть подключена к приемно-формирующему блоку непосредственно, а крайние - через коммутаторы, переключаемые блоком управления лучами антенн.
| ВОЕННАЯ АВИАЦИЯ | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - Минск: ПОПУРРИ, 1999, стр.505 | |||
| RU 95121375 А, 27.01.1998 | |||
| RU 97122007 A, 10.04.1999 | |||
| US 5671898 A, 30.09.1997. | |||

