Группа изобретений относится к трубопроводному транспорту и может быть использована для диагностики технического состояния магистральных трубопроводов.
Известен способ дистанционного мониторинга технического состояния магистрального трубопровода (ТС МТ), заключающийся в облете контролируемой трассы МТ летательным аппаратом (ЛА) и контроль ТС МТ путем радиолокации последнего /Патент РФ №2260742, Кл. F17D 5/02, 2004/.
Недостатком известного способа является возможность потери информации о ТС МТ в период между облетами ЛА МТ.
Известен способ дистанционного мониторинга ТС МТ, заключающийся в облете контролируемой трассы МТ ЛА, например вертолетом, при использовании на нем радиоприемопередающего оборудования и вычислительного комплекса для считывания информации о ТС МТ, а также навигационного оборудования /Патент РФ №2040783, Кл. G01М 3/00, 1995/.
Данный способ принят за прототип.
В прототипе обзор трассы МТ осуществляют метровым локатором. Одновременно сканируют МТ съюстированными тепловизионным и телевизионным датчиками. Затем осуществляют совместную цифровую обработку сигналов датчиков.
Известна система для дистанционного мониторинга ТС МТ, реализуемая в системе контроля перехода МТ с устройством катодной зашиты через авто- или железные дороги /Патент РФ №2264578, Кл. F17D 5/02, F16L 7/00, 58, 2005/.
Данная система может применяться во множестве пунктов, поэтому, учитывая большие расстояния между пунктами контроля, считывание информации в известной системе может осуществляться с ЛА. То есть известная система может быть принята за прототип.
Система для дистанционного мониторинга ТС МТ содержит стационарный интеллектуальный контрольно-измерительный пункт (ИКИП), включающий в себя датчики параметров, влияющих на ТС МТ, центральный процессор (ЦП), радиомодем с приемопередающей антенной, аккумуляторную батарею (АКБ), соединенную с фотоэлектрическим модулем (ФМ), мультиплексор и аналого-цифровой преобразователь (АЦП), при этом выходы датчиков параметров, влияющих на ТС МТ, подключены через последовательно соединенные мультиплексор и АЦП к ЦП, причем выходы ЦП также соединены с управляемыми входами мультиплексора и радиомодема.
Недостатком способа дистанционного мониторинга ТС МТ и системы для его реализации является потеря информации о ТС МТ в период между облетами контролируемой трассы МТ ЛА.
Техническим результатом, получаемым от внедрения группы изобретений, является устранение недостатка прототипов, т.е. устранение возможности потери информации о ТС МТ.
Данный технический результат достигается за счет того, что в известном способе, заключающемся в облете контролируемой трассы МТ летательным аппаратом, например, вертолетом, при использовании на нем радиоприемопередающего оборудования и вычислительного комплекса для считывания информации о ТС МТ, а также навигационного оборудования для определения пространственных координат контролируемых участков трассы МТ, информацию о ТС МТ предварительно измеряют с помощью стационарных интеллектуальных контрольно измерительных пунктов, снабженных радиомодемами, энергонезависимыми оперативно-запоминающими устройствами (ОЗУ) и датчиками параметров, влияющих на ТС МТ, расположенных вдоль МТ с заданным шагом, затем запоминают полученную ИКИП информацию в энергонезависимых ОЗУ, а облет контролируемой трассы ТМ проводят с периодичностью, определяемой объемом памяти ОЗУ, при этом считывание информации с помощью радиоприемопередающего оборудования ЛА начинается с ближайшего к ЛА ИКИП по направлению, противоположному направлению полета ЛА.
Данный технический результат достигается также за счет того, что в известной системе для дистанционного мониторинга ТС МТ, содержащей стационарный ИКИП, включающий в себя датчики параметров, влияющих на ТС МТ, центральный процессор, радиомодем с приемопередающей антенной, аккумуляторную батарею (АКБ), соединенную с фотоэлектрическим модулем (ФМ), мультиплексор и АЦП, при этом выходы датчиков параметров, влияющих на ТС МТ, подключены через последовательно соединенные мультиплексор и АЦП к ЦП, причем выходы процессора также соединены с управляемыми входами мультиплексора и радиомодемом, дополнительно содержит n аналогичных ИКИП, расположенных вдоль МТ, при этом каждый ИКИП дополнительно содержит ОЗУ, соединенные с процессором двухсторонней связью, а управляемый вход радиомодема соединен с выходом процессора также двухсторонней связью, причем все элементы ИКИП расположены под землей в защитном корпусе, а ФМ и приемопередающая антенна закреплены на верхнем конце вертикальной стойки, заглубленной нижним концом в землю, при этом светочувствительная плоскость ФМ установлена под углом 5-10° горизонту, а высота вертикальной стойки задается более 1,5, м.
ИКИП расположены вдоль МТ с равномерным шагом. Вертикальная стойка выполнена из металлического уголка.
Изобретения поясняются чертежами.
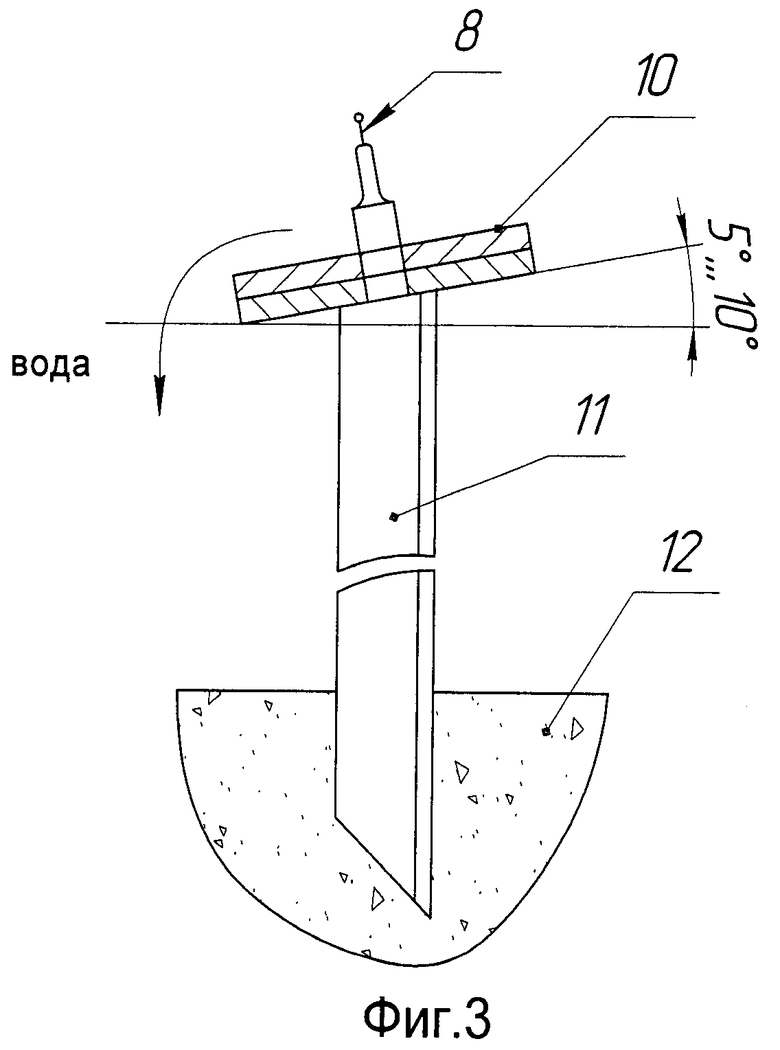
На фиг.1 представлена схема системы для реализации способа; на фиг.2 - блок схема ИКИП; на фиг.3 - конструктивная схема приемопередающей радиоантенны.
Система для дистанционного мониторинга ТС МТ содержит стационарные ИКИП 11, 12… (фиг.1), каждый из которых включает в себя датчики 21, 22… параметров, влияющих на ТС МТ, мультиплексор 3, АЦП 4, ЦП 5, ОЗУ 6, радиомодем 7 с приемопередающей антенной 8, АКБ 9 и ФМ 10 (фиг.2).
Связи между электронными блоками в ИКИП 1 представлены на фиг.2. Датчики 2 подключены выходами через последовательно соединенные мультиплексор 3, АЦП 4 и ЦП 5 к ОЗУ 6. Выход ЦП 5 соединен также с управляющим входом мультиплексора 3, а ЦП 5 соединен с радиомодемом 7 двухсторонней связью. Такой же связью ЦП 5 соединен с ОЗУ 6.
Все ИКИП расположены с заданным пространственным шагом вдоль МТ под землей в защитном корпусе (не показан), а ФМ 10 и приемопередающая антенна 8 закреплены в каждом ИКИП на верхнем конце вертикальной стойки 11 (фиг.3), заглубленной нижним концом в землю 12.
Стойка 11 может быть выполнена из уголка.
Зеркальная плоскость ФМ 10 наклонена к горизонту под углом 5-10°, а высота наземной части стойки выбирается более 1,5 м.
Угол наклона светочувствительной зеркальной плоскости ФМ 10 к горизонту задается из условия обеспечения стока воды с ее поверхности, а высота стойки 11 - из условия обеспечения отсутствия зеркального отображения от ФМ 10 на высоте человеческого роста для сбережения антенны от вандалов.
ИКИП 1 располагают вдоль МТ 13 (фиг.1) с равномерным шагом, величина которого задается конкретными техническими условиями.
ЛА 14 (фиг.1), который не входит в состав системы, оснащается вычислительным комплексом 15, построенным, например, на базе IBM-совместимого компьютера в промышленном исполнении. Вычислительный комплекс ЛА 14 питается от импульсного блока 16 питания от бортовой сети. Радиомодем 17 ЛА 14 с приемопередающей антенной 18 соединен с блоком питания 16 и вычислительным комплексом 15.
В качестве датчиков 2 параметров, влияющих на ТС МТ, применяются известные датчики скорости коррозии, датчики акустической эмиссии, датчики утечки, датчики температуры и давления транспортируемой среды, датчики сопротивления изоляции МТ, тензометры и другие.
Способ дистанционного мониторинга ТС МТ реализуется в системе аналогичного назначения следующим образом.
ЛА 14 с установленным на его борту вычислительным комплексом 15 осуществляет пролет вдоль МТ 13 и последовательный опрос всех ИКИП 1 со считыванием содержимого ОЗУ 6, представляющего собой отсчеты параметров всех видов датчиков 2 за весь период времени, прошедший с момента времени считывания.
В каждый момент времени опрашивается только один ИКИП 1 системы, поэтому в состав вычислительного комплекса 15 ЛА 14 включена навигационная аппаратура потребителей, осуществляющая определение текущих координат ЛА 14 и определение адреса ближайшего к ЛА 14 ИКИП 1 по направлению, противоположному направлению полета ЛА 14, для первоочередного опроса. В противном случае, информация с данного ИКИП 1 может быть утеряна.
После пролета ЛА 14 вдоль контролируемого участка МТ 13 система начинает работать в режиме накопления (записи) информации о ТС МТ. Датчики 2 выдают через мультиплексор 3, АЦП 4 и ЦП 5 информацию о ТС МТ на ОЗУ 6, где она в оцифрованном виде запоминается до следующего облета ЛА 14 контролируемого участка МТ 13.
Подземный вариант исполнения ИКИП, а также вандалоустойчивый вариант исполнения наземных его частей (антенны) позволяют обеспечить длительное хранение информации между очередными облетами ЛА контролируемого участка МТ.
С другой стороны, наклон поверхности ФМ к горизонту обеспечивает сток воды и устойчивую работу последнего, для регулярной подзарядки АКБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГЛУБОКОВОДНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА (ВАРИАНТЫ) | 2008 |
|
RU2392537C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА ТЕХНИЧЕСКИМ СОСТОЯНИЕМ МАГИСТРАЛЬНОГО ГАЗОПРОВОДА И ИНТЕЛЛЕКТУАЛЬНАЯ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ КОЛОНКА ДЛЯ ЕЕ РЕАЛИЗАЦИИ | 2009 |
|
RU2393378C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС МОНИТОРИНГА КОРРОЗИОННОЙ ЗАЩИТЫ ПОДЗЕМНЫХ СООРУЖЕНИЙ | 2013 |
|
RU2580610C2 |
| СПОСОБ МОНИТОРИНГА И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОСТУПЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ В УЧАСТОК ТРУБОПРОВОДА | 2010 |
|
RU2477818C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДВОДНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2009 |
|
RU2433334C2 |
| СИСТЕМА КОНТРОЛЯ ПЕРЕХОДА ТРУБОПРОВОДА С УСТРОЙСТВОМ КАТОДНОЙ ЗАЩИТЫ ПОД АВТО- И ЖЕЛЕЗНЫМИ ДОРОГАМИ | 2004 |
|
RU2264578C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2439519C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА | 2009 |
|
RU2413250C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ | 2002 |
|
RU2231037C1 |


Группа изобретений относится к трубопроводному транспорту и может быть использована для диагностики технического состояния магистральных трубопроводов. Сущность технического решения в части способа заключается в том, что вдоль магистральных трубопроводов с заданным пространственным шагом устанавливают интеллектуальные контрольно-измерительные комплексы (ИКИП), оснащенные датчиками параметров, влияющих на технического состояния магистральных трубопроводов, оперативно запоминающим устройством (ОЗУ) и радиомодемом. Летательный аппарат (ЛА), оснащенный вычислительным комплексом, навигационным оборудованием и радиомодемом, пролетает вдоль магистрального трубопровода и считывает информацию, хранящуюся в ОЗУ ИКИП. Сущность технического решения в части устройства заключается в оригинальном исполнении ИКИП и его антенны. Последняя выполняется в вандалоустойчивом варианте, для чего система дополнительно содержит n аналогичных интеллектуальных контрольно-измерительных пунктов, расположенных вдоль магистрального трубопровода, при этом каждый интеллектуальный контрольно-измерительный пункт дополнительно содержит оперативно-запоминающее устройство, соединенное с центральным процессором двухсторонней связью, а управляемый вход радиомодема соединен с выходом центрального процессора также двухсторонней связью, причем все элементы интеллектуальных контрольно-измерительных пунктов расположены под землей в защитном корпусе, а фотомодуль и приемопередающая антенна закреплены на верхнем конце вертикальной стойки, заглубленной нижним концом в землю, при этом светочувствительная плоскость фотомодуля установлена под углом 5-10° к горизонту, а высота вертикальной стойки задается более 1,5 м. 2 н. и 3 з.п. ф-лы, 3 ил.
1. Способ дистанционного мониторинга технического состояния магистрального трубопровода, заключающийся в облете контролируемой трассы магистрального трубопровода летательным аппаратом, например, вертолетом, при использовании на нем радиоприемопередающего оборудования и вычислительного комплекса для считывания информации о техническом состоянии магистрального трубопровода, а также навигационного оборудования, отличающийся тем, что информацию о техническом состоянии магистрального трубопровода предварительно измеряют с помощью стационарных интеллектуальных контрольно-измерительных пунктов, снабженных радиомодемами, энергонезависимыми оперативно-запоминающими устройствами и датчиками параметров, влияющих на техническое состояние магистрального трубопровода, расположенных вдоль трубопровода с заданным шагом, затем запоминают полученную интеллектуальными контрольно-измерительными пунктами информацию в энергонезависимых оперативно-запоминающих устройствах, а облет контролируемой трассы магистрального трубопровода проводят с периодичностью, определяемой объемом памяти оперативно-запоминающего устройства.
2. Способ по п.1, отличающийся тем, что считывание информации с помощью радиоприемопередающего оборудования летательного аппарата начинается с ближайшего к летательному аппарату интеллектуального контрольно-измерительного пункта по направлению, противоположному направлению полета летательного аппарата.
3. Система для дистанционного мониторинга технического состояния магистрального трубопровода, содержащая стационарный интеллектуальный контрольно-измерительный пункт, включающий в себя датчики параметров, влияющих на техническое состояние магистрального трубопровода, центральный процессор, радиомодем с приемопередающей антенной, аккумуляторную батарею, соединенную с фотоэлектрическим модулем, мультиплексор и аналого-цифровой преобразователь, при этом выходы датчиков параметров, влияющих на техническое состояние магистрального трубопровода, подключены через последовательно соединенные мультиплексор и аналого-цифровой преобразователь к центральному процессору, причем выходы центрального процессора также соединены с управляемыми входами мультиплексора и радиомодема, отличающаяся тем, что дополнительно содержит n аналогичных интеллектуальных контрольно-измерительных пунктов, расположенных вдоль магистрального трубопровода, при этом каждый интеллектуальный контрольно-измерительный пункт дополнительно содержит оперативно-запоминающее устройство, соединенное с центральным процессором двухсторонней связью, а управляемый вход радиомодема соединен с выходом центрального процессора также двухсторонней связью, причем все элементы интеллектуальных контрольно-измерительных пунктов расположены под землей в защитном корпусе, а фотомодуль и приемопередающая антенна закреплены на верхнем конце вертикальной стойки, заглубленной нижним концом в землю, при этом светочувствительная плоскость фотомодуля установлена под углом 5-10° к горизонту, а высота вертикальной стойки задается более 1,5 м.
4. Система по п.2, отличающаяся тем, что интеллектуальные контрольно-измерительные пункты расположены вдоль магистрального трубопровода с равномерным шагом.
5. Система по п.2, отличающаяся тем, что вертикальная стойка выполнена из металлического уголка.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ | 1991 |
|
RU2040783C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ТРУБОПРОВОДА В ЗОНЕ ВЕЧНОЙ МЕРЗЛОТЫ | 2004 |
|
RU2260742C1 |
| СИСТЕМА КОНТРОЛЯ ПЕРЕХОДА ТРУБОПРОВОДА С УСТРОЙСТВОМ КАТОДНОЙ ЗАЩИТЫ ПОД АВТО- И ЖЕЛЕЗНЫМИ ДОРОГАМИ | 2004 |
|
RU2264578C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| Пробоотборник для жидкостей | 1930 |
|
SU40045A1 |

