Изобретение относится к трубопроводному транспорту и может быть использовано для диагностики технического состояния подводных участков магистральных трубопроводов (МТ), например проложенных по морскому дну.
Техническое состояние МТ определяется наличием или отсутствием транспортируемого продукта из МТ.
Известен способ того же назначения, согласно которому техническую диагностику морского МТ проводят с помощью гидроакустической антенны, располагаемой параллельно трубопроводу /Патент РФ №2183303, кл. F17D 5/06, G01M 3/24, 2002/.
Известен способ того же назначения, согласно которому техническую диагностику морского МТ проводят с помощью последовательно соединенных многолучевых антенн с веерными диаграммами направленности /Патент РФ №2193724, кл. F17D 5/06, G01M 3/24, 2002/.
Известен способ контроля технического состояния подводного МТ, принятый за прототип, заключающийся в установке на подводном трубопроводе датчиков, параметров, характеризующих техническое состояние трубопровода, по показаниям которых судят об угрозе появления опасного состояния контролируемого трубопровода /Патент РФ №2193725, кл. F17D 5/06, G01M 3/24, 2002/.
В прототипе в качестве датчиков параметров, характеризующих техническое состояние МТ, используется последовательность автономных гидроакустических приемоответчиков, установленных на контролируемом участке подводного МТ, смонтированных совместно с датчиками глубины.
Недостатками известных аналогов, в том числе и прототипа, являются трудности технического обслуживания аппаратуры, реализующей известные способы. Трудности эксплуатации аппаратуры связаны с тем, что датчики параметров, характеризующих техническое состояние МТ, расположены под водой, иногда на значительной глубине. (При этом выходные сигналы с датчиков по кабелю направляются на береговую обрабатывающую аппаратуру.) Любая поломка датчика на большой глубине связана с проблемами его замены.
Техническим результатом, получаемым от внедрения изобретения, является повышение эксплуатационных возможностей аппаратуры, реализующей известный способ, за счет расположения датчиков не на глубине водоема, как в прототипе, а по урезу воды водоема, в котором расположен МТ.
Данный технический результат достигается за счет того, что в известном способе контроля технического состояния подводного магистрального трубопровода, заключающемся в установке на трубопроводе измерителя параметров, характеризующих техническое состояние трубопровода, по показаниям которого судят об угрозе появления опасного состояния контролируемого трубопровода, в качестве измерителя параметров, характеризующих техническое состояние трубопровода, используют датчик линейных деформаций, установленный на трубопроводе в водоеме по урезу воды, при этом показания датчика сравнивают с пороговым значением, и при превышении показаний датчика над пороговым значением диагностируют угрозу опасного состояния подводного магистрального трубопровода.
Измеритель параметров, характеризующих техническое состояние трубопровода, дополнен вторым аналогичным датчиком линейных деформаций, причем оба датчика установлены на трубопроводе с двух сторон водоема по урезу воды, при этом при превышении показаний хотя бы одного из датчиков над пороговым значением диагностируют угрозу опасного состояния подводного магистрального трубопровода.
После диагностирования угрозы опасного состояния подводного магистрального трубопровода проводят наблюдение за состоянием водной поверхности над магистральным трубопроводом и отслеживают появление продуктов транспортировки на поверхности воды, по которым определяют пространственные координаты места появления утечки транспортируемого продукта.
Наблюдение за состоянием водной поверхности проводят с помощью телевизионной камеры.
Телевизионную камеру перемещают вдоль контролируемого трубопровода с помощью летательного аппарата или надводного плавсредства.
В измеритель параметров, характеризующих техническое состояние трубопровода, дополнительно вводят датчик давления транспортируемой среды, при этом определяют функциональную зависимость показаний датчика линейных деформаций и показаний датчика давления, затем контролируют линейность этой функциональной зависимости и при нарушении линейности данной зависимости также диагностируют угрозу опасного состояния магистрального трубопровода.
После диагностирования угрозы опасного состояния подводного магистрального трубопровода проводят обследование последнего с помощью автономного подводного аппарата.
Изобретение поясняется чертежами. На фиг.1 представлена схема реализации способа, на фиг.2 - функциональная схема аппаратуры, реализующей способ.
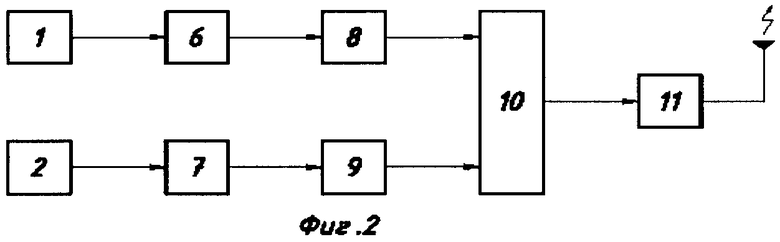
Аппаратура, реализующая способ, содержит, например, два датчика 1, 2 линейных деформаций, установленных на МТ 3 по урезу 4 воды по одному у противоположных берегов водоема 5 (фиг.1).
Выходы датчиков 1, 2 через усилители 6, 7 подключены к аналого-цифровым преобразователям 8, 9 (АЦП 8, 9). Выходы АЦП 8, 9 соединены с микропроцессором 10 (МП 10). Выход МП 10 подключен к управляемому входу радиомодема 11, связанного по радиоканалу с диспетчерским пунктом (на фиг.2 не показан).
В состав аппаратуры, реализующей способ, может входить надводное судно (не показано) или летательный аппарат 12, снабженный телевизионной камерой 13 и радиомодемом 14.
В состав аппаратуры также может входить датчик давления, контролирующий давление транспортируемой среды, а также датчики акустической эмиссии, датчики скорости коррозии МТ, датчики потенциала МТ относительно земли и др. (на чертеже не показаны).
Способ реализуется следующим образом. С помощь датчиков 1, 2 линейных деформаций, установленных на МТ 3 по урезу воды водоема 5, контролируется напряженно-деформированное состояние подводного трубопровода в наиболее «слабых» местах последнего.
Любая нештатная механическая нагрузка на подводную часть трубопровода неизбежно скажется на показаниях датчиков 1, 2, расположенных по урезу 4 воды водоема 5.
Выходные сигналы датчиков 1, 2 после усиления в усилителях 6, 7 и оцифровки в АЦП 8, 9 направляются в МП 10, где сравниваются с пороговым значением, величина которого задается, исходя из разумного компромисса между величиной вероятности пропуска опасного состояния МТ 3 и величиной вероятности ложного срабатывания аппаратуры.
Выходной сигнал с МП 10 направляется на управляемый вход радиомодема 11, с помощью которого сигнал о техническом состоянии трубопровода направляют на диспетчерский пункт (не показан).
При превышении хотя бы одним из выходных сигналов датчиков 1, 2 порогового значения диагностируют угрозу опасного состояния МТ 3.
Для повышения надежности аппаратуры дополнительно контролируют линейность зависимости показаний датчиков 1 или 2 и датчика давления транспортируемой среды. А также контролируют величины акустической эмиссии, электрического потенциала и скорости текущей и суммарной коррозии МТ 3.
После диагностирования угрозы опасного состояния МТ 3 проводят наблюдение за состоянием водной поверхности водоема 5 над МТ 3.
Наблюдение проводят, например, путем облета водной поверхности с помощью летательного аппарата 12 вдоль МТ 3.
Поле зрения видеокамеры 13 летательного аппарата 12 направлено на водную поверхность водоема 5.
При обнаружении на поверхности водоема 5 продуктов транспортировки, например, газовых пузырей 15 (фиг.1) с летательного аппарата 12 с помощью радиомодема 14 на диспетчерский пункт направляется информация о пространственных координатах места прорыва МТ 3.
Расположение датчиков 1, 2 по урезу воды позволяет повысить эксплуатационную способность аппаратуры, реализующей способ, поскольку облегчается замена вышедших из строя датчиков. Этим достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2009 |
|
RU2423644C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕСЕЧЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2413902C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГЛУБОКОВОДНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА (ВАРИАНТЫ) | 2008 |
|
RU2392537C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕСЕЧЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2433332C2 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ЗА ТЕХНИЧЕСКИМ СОСТОЯНИЕМ МАГИСТРАЛЬНОГО ГАЗОПРОВОДА И ИНТЕЛЛЕКТУАЛЬНАЯ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ КОЛОНКА ДЛЯ ЕЕ РЕАЛИЗАЦИИ | 2009 |
|
RU2393378C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ВЗАИМНЫХ ПЕРЕСЕЧЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2427752C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕХОДА МАГИСТРАЛЬНОГО ТРУБОПРОВОДА ЧЕРЕЗ ДОРОГУ | 2009 |
|
RU2433335C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПЕРЕСЕЧЕНИЙ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2423643C2 |
| СПОСОБ МОНИТОРИНГА И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2451874C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392536C1 |
Способ контроля технического состояния подводного магистрального трубопровода относится к трубопроводному транспорту и может быть использован для диагностики технического состояния подводных участков магистрального трубопроводов. Способ заключается в установке на трубопроводе измерителя параметров, характеризующих техническое состояние трубопровода, по показаниям которого судят об угрозе появления опасного состояния контролируемого трубопровода. В качестве измерителя параметров, характеризующих техническое состояние трубопровода, используют датчик линейных деформаций, установленный на трубопроводе в водоеме по урезу воды, при этом показания датчика сравнивают с пороговым значением, и при превышении показаний датчика над пороговым значением диагностируют угрозу опасного состояния подводного магистрального трубопровода. Технический результат - повышение эксплуатационных возможностей аппаратуры. 6 з.п. ф-лы, 2 ил.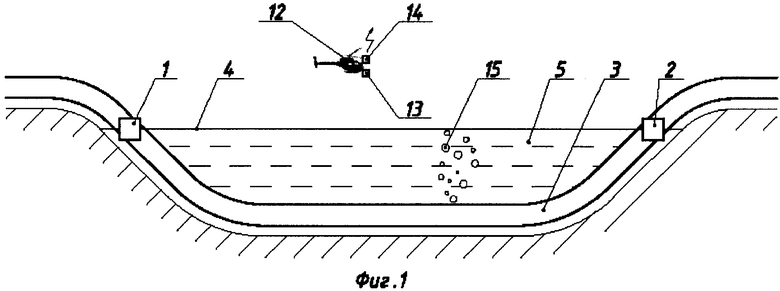
1. Способ контроля технического состояния подводного магистрального трубопровода, заключающийся в установке на трубопроводе измерителя параметров, характеризующих техническое состояние трубопровода, по показаниям которого судят об угрозе появления опасного состояния контролируемого трубопровода, отличающийся тем, что в качестве измерителя параметров, характеризующих техническое состояние трубопровода, используют датчик линейных деформаций, установленный на трубопроводе в водоеме по урезу воды, при этом показания датчика сравнивают с пороговым значением и при превышении показаний датчика над пороговым значением диагностируют угрозу опасного состояния подводного магистрального трубопровода.
2. Способ по п.1, отличающийся тем, что измеритель параметров, характеризующих техническое состояние трубопровода, дополнен вторым аналогичным датчиком линейных деформаций, причем оба датчика установлены на трубопроводе с двух сторон водоема по урезу воды, при этом при превышении показаний хотя бы одного из датчиков над пороговым значением диагностируют угрозу опасного состояния подводного магистрального трубопровода.
3. Способ по п.1, отличающиеся тем, что после диагностирования угрозы опасного состояния подводного магистрального трубопровода проводят наблюдение .за состоянием водной поверхности над магистральным трубопроводом и отслеживают появление продуктов транспортировки на поверхности воды, по которым определяют пространственные координаты места появления утечки транспортируемого продукта.
4. Способ по п.3, отличающийся тем, что наблюдение за состоянием водной поверхности проводят с помощью телевизионной камеры.
5. Способ по п.4, отличающийся тем, что телевизионную камеру перемещают вдоль контролируемого трубопровода с помощью летательного аппарата или надводного плавсредства.
6. Способ по п.1, отличающийся тем, что в измеритель параметров, характеризующих техническое состояние трубопровода, дополнительно вводят датчик давления транспортируемой среды, при этом определяют функциональную зависимость показаний датчика линейных деформаций и показаний датчика давления, затем контролируют линейность этой функциональной зависимости и при нарушении линейности данной зависимости также диагностируют угрозу опасного состояния магистрального трубопровода.
7. Способ по п.1, отличающийся тем, что после диагностирования угрозы опасного состояния подводного магистрального трубопровода проводят обследование последнего с помощью автономного подводного аппарата.
| АППАРАТУРА ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ДЕФОРМАЦИЙ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2007 |
|
RU2334162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2190152C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАЦИОНАРНАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГЛУБОКОВОДНОГО ТРУБОПРОВОДА | 2001 |
|
RU2193724C1 |
| Способ дистанционного обнаружения утечек в трубопроводе | 1991 |
|
SU1800219A1 |
| DE 102007041178 A1, 05.03.2009. | |||

