Предлагаемое устройство относится к приборам, измеряющим угловую скорость, в частности к микромеханическим гироскопам (ММГ).
Известны ММГ с обратной связью по скорости перемещения подвижной массы по оси вторичных колебаний (Woon-Tahk Sung и др. "Ноо Controller Design of MEMS Gyroscope and Its Performance Test" (№0-7803-8416-4/04/$20.0002004 IEEE,), включающие в себя подвижный механический элемент, измерительные электроды, к которым подключен вход ПИД-регулятора, и силовые электроды, на которых формируется напряжение с выхода ПИД-регулятора. В случае, когда в ММГ отсутствует квадратурная помеха, то сформированное на силовых электродах напряжение пропорционально Кориолисову ускорению. В этих ММГ за счет обратной связи обеспечивается компенсация сил, обусловленных Кориолисовыми ускорениями.
При наличии квадратурной помехи в составе сформированного на силовых электродах напряжения присутствует составляющая, пропорциональная этой помехе. Для ее исключения в выходном сигнале применяется компенсация квадратурной помехи (Патент РФ №2301970, 2007 г.).
Однако несмотря на отсутствие квадратурной помехи в выходном сигнале ротор по-прежнему будет совершать колебания, что приведет к уменьшению динамического диапазона гироскопа. Также наличие колебаний ротора не позволит ввести достаточно большой коэффициент в обратной связи, что отрицательно скажется на линейности выходной характеристики гироскопа и ширине частотного диапазона.
Поэтому в данном изобретении для введения гироскопа в компенсационный режим и исключения квадратурной помехи предлагается подавлять квадратурную помеху не в тракте выходного канала, а на уровне самого чувствительного элемента.
Работа гироскопа в компенсационном режиме позволит снизить зазор между подвижной массой (ПМ) и электродами без уменьшения динамического диапазона работы ММГ из-за ограничений свободного хода ПМ по оси вторичных колебаний. Дополнительными преимуществами введения глубокой обратной связи является повышение линейности ММГ, т.к. компенсирующая сила линейно зависит от формируемого напряжения и на эту характеристику не оказывает влияние нелинейность емкостного датчика перемещения ПМ, т.к. само перемещение отсутствует или незначительно. Кроме того, возрастает и полоса пропускания ММГ, которая уже не определяется полосой пропускания резонансного подвеса.
При введении глубокой отрицательной обратной связи происходит изменение фазы выходного сигнала на выходе емкостного датчика таким образом, что квадратурная помеха становится сдвинутой на 90° относительно сигнала первичных колебаний, а полезный сигнал находится в фазе с сигналом первичных колебаний. Причем сдвиг фаз практически не зависит от разности частот между первичными и вторичными колебаниями, а сигнал на силовых электродах находится в противофазе с силой Кориолиса.
Подавление квадратурной помехи осуществляется с помощью дополнительных звеньев:
- устройства подавления квадратурной помехи, которое выделяет квадратурную помеху в канале вторичных колебаний и с помощью ПИ-регулятора формирует сигнал на силовых электродах, пропорциональный квадратурному моменту, но противоположный по фазе;
- усилителя.
Для обеспечения устойчивой работы гироскопа во время переходных процессов, например, при включении гироскопа, а также снижения требования к быстродействию устройства подавления квадратуры на силовые электроды подается дополнительный сигнал от емкостного датчика первичных колебаний, усиленный с помощью дополнительного усилителя, коэффициент усиления которого подбирается таким образом, чтобы создать сигнал, пропорциональный квадратурному моменту, но противоположный по фазе.
Устройство, описанное в патенте РФ №2301970 «Микромеханический гироскоп вибрационного типа», является наиболее близким к предлагаемому устройству и выбрано в качестве прототипа.
Задачей, на решение которой направлено изобретение, является увеличение линейности ММГ и расширение частотного и динамического диапазонов.
Решение указанной задачи достигается тем, что в микромеханический гироскоп вибрационного типа введены последовательно соединенные усилитель и дифференцирующее звено, включенные между парой измерительных электродов и парой силовых электродов по оси вторичных колебаний, последовательно включенные фазовращатель, умножитель и фильтр низкой частоты, при этом вход фазовращателя подключен к выходу емкостного датчика перемещения по оси первичных колебаний, а второй вход умножителя соединен с выходом дифференцирующего звена, отличающееся тем, что между выходом емкостного датчика по оси вторичных колебаний и парой силовых электродов по оси вторичных колебаний введено устройство подавления квадратуры. Кроме того, решение указанной задачи достигается тем, что устройство подавления квадратуры выполнено в виде последовательно соединенных первого умножителя, интегратора, второго умножителя, второй вход первого умножителя соединен с выходом фазовращателя, второй вход второго умножителя соединен с выходом емкостного датчика по оси первичных колебаний. Кроме того, решение указанной задачи достигается тем, что между выходом емкостного датчика по оси вторичных колебаний и парой силовых электродов по оси вторичных колебаний введен усилитель с постоянным коэффициентом усиления.
Основное преимущество предлагаемого изобретения обусловлено заявленной совокупностью признаков.
Заявленное устройство поясняется чертежами.
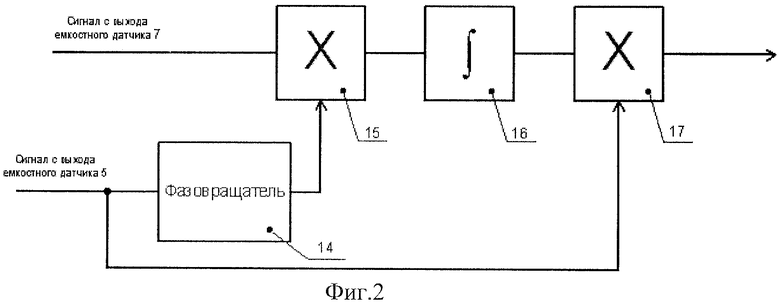
На фиг.1 приведена блок-схема предлагаемого устройства. На фиг.2 приведена блок-схема устройства подавления квадратуры. На фиг.1 и 2 приняты следующие обозначения:
1 - чувствительный элемент (ЧЭ) микромеханического гироскопа;
2 - подвижный элемент;
3 - измерительные электроды;
4 - силовые электроды;
5, 7 - емкостные датчики;
6, 14 - фазовращатели;
8, 13 - усилители;
9 - дифференцирующее звено;
10 - устройство подавления квадратуры;
11, 15, 17 - умножители;
12 - фильтр низких частот;
16 - интегратор.
18 - устройство возбуждения первичных колебаний.
Чувствительный элемент 1 состоит из подвижного элемента 2, измерительных электродов по осям первичных и вторичных колебаний 3 и силовых электродов 4, которые вместе с подвижным элементом 2 по оси первичных колебаний образуют гребенчатый двигатель. К измерительным электродам 3 подключены емкостные датчики 5 и 7, преобразующие емкость в напряжение. К выходу емкостного датчика 7 по оси вторичных колебаний последовательно подключены дифференцирующее звено 9 и усилитель 13, первый вход устройства подавления квадратуры 10. Выход усилителя 13 соединен с силовыми электродами 4 ЧЭ 1. К выходу емкостного датчика 5 по оси первичных колебаний подключены фазовращатель 6, второй вход устройства подавления квадратуры 10 и усилитель 8. Выход устройства подавления квадратуры 10 и выход усилителя 8 соединены с силовыми электродами 4 ЧЭ 1. Второй вход умножителя 11 соединен с выходом фазовращателя 8 и выходом усилителя 13. Выход умножителя 11 соединен с входом фильтра низкой частоты 12.
Устройство работает следующим образом.
Устройство возбуждения первичных колебаний 18 возбуждает колебания подвижного элемента 2 по оси первичных колебаний. Подробное описание работы устройства возбуждения колебаний приведено в книге Распопова В.Я. Микромеханические гироскопы, Тула, 2004 г. стр.416. Под действием силы Кориолиса и сил, возникающих из-за нежесткости торсионов, ротор начинает отклоняться. Сигнал, преобразованный в напряжение при помощи емкостного датчика 7, пропорциональный отклонениям ротора, поступает на последовательно включенные дифференцирующее звено, 9 и усилитель 13, которые обеспечивают работу гироскопа в компенсационном режиме. Сигнал с выхода усилителя 13 подается на силовые электроды 4.
Сигнал с емкостного датчика 7 также поступает на устройство подавления квадратурной помехи 10, где поступает на вход умножителя 15. Поскольку па второй вход умножителя 15 поступает напряжение, с помощью фазовращателя 14 сдвинутое на 90° той же частоты, что и на первый вход, элемент 15 осуществляет фазочувствительное детектирование входного сигнала и выделяет сигнал, синфазный с сигналом, поступающим от емкостного датчика 5, т.е. квадратурную помеху. Выделенный сигнал интегрируется элементом 16 и модулируется сигналом, находящимся в противофазе с моментом, вызывающим квадратурную помеху, с выхода емкостного датчика 5 с помощью умножителя 17. Поскольку момент, вызывающий квадратурную помеху, и выходной сигнал умножителя 17 находятся в противофазе, происходит подавление квадратурной помехи. Сигнал с выхода емкостного датчика 5 также подается на вход усилителя 8. Коэффициент усиления усилителя 8 подбирается таким образом, чтобы квадратурная помеха была полностью подавлена. Наличие усилителя 8 позволяет обеспечить устойчивость работы гироскопа во время переходных процессов, например при включении гироскопа, а также снизить требования к быстродействию устройства подавления квадратуры 10.
Выходной сигнал с усилителя 13 с уже отсутствующей квадратурной помехой поступает на умножитель 11, где перемножается с сигналом, сдвинутым фазовращателем 6 на 90° по отношению к напряжению на выходе емкостного датчика 5 по оси первичных колебаний, т.е. с синфазным сигналом. Затем сигнал, содержащий только полезную составляющую, фильтруется на ФНЧ 12. Таким образом, на выходе получаем напряжение, содержащее информацию об угловой скорости основания ММГ.
Изобретение относится к приборам, измеряющим угловую скорость, в частности к микромеханическим гироскопам (ММГ). ММГ вибрационного типа содержит емкостные датчики перемещения подвижного механического элемента по оси первичных колебаний, две пары электродов по оси вторичных колебаний, одна из которых является измерительной, другая - силовой, устройство возбуждения первичных колебаний, включенное между емкостными датчиками по оси первичных колебаний и электродами гребенчатого двигателя, дифференцирующее звено и последовательно включенные фазовращательное звено, умножитель и фильтр низкой частоты. Между выходом емкостного датчика по оси вторичных колебаний и парой силовых электродов по оси вторичных колебаний введено устройство подавления квадратуры, выполненное в виде последовательно соединенных первого умножителя, интегратора и второго умножителя, а между выходом емкостного датчика по оси вторичных колебаний и парой силовых электродов по оси вторичных колебаний введен усилитель с постоянным коэффициентом усиления. Изобретение позволяет повысить линейность и точность ММГ и расширить его частотный диапазон. 1 з.п. ф-лы, 2 ил.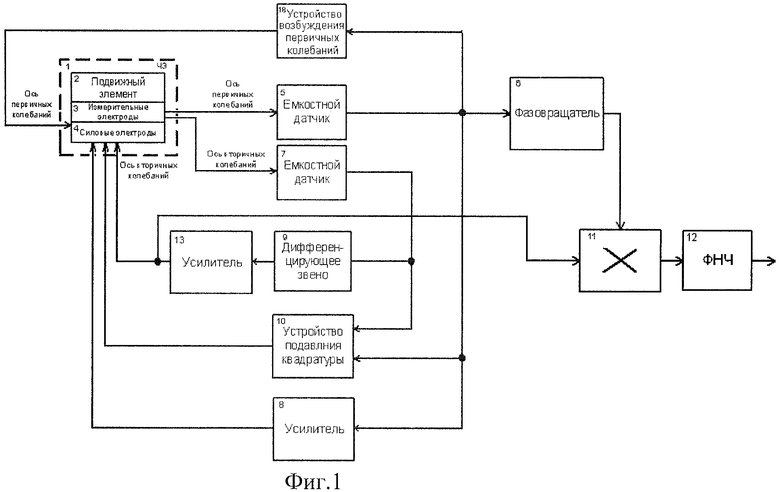
1. Микромеханический гироскоп компенсационного типа, включающий в себя подвижный механический элемент, гребенчатый двигатель, образованный гребенками статоров и ротора, емкостной датчик перемещения подвижного механического элемента по оси первичных колебаний, емкостной датчик перемещения подвижного механического элемента по оси вторичных, две пары электродов по оси вторичных колебаний, одна из которых является измерительной, другая - силовой, устройство возбуждения первичных колебаний, включенное между емкостным датчиком по оси первичных колебаний и электродами гребенчатого двигателя, дифференцирующее звено, включенное между парой измерительных и парой силовых электродов по оси вторичных колебаний, последовательно включенные фазовращатель, умножитель и фильтр низкой частоты, при этом вход фазовращателя подключен к выходу емкостного датчика перемещения по оси первичных колебаний, а второй вход умножителя соединен с выходом дифференцирующего звена, а также устройство подавления квадратуры, выполненное в виде последовательно соединенных первого умножителя, интегратора и второго умножителя, один вход которого подключен к выходу емкостного датчика по оси первичных колебаний, отличающийся тем, что в устройство подавления квадратуры введен фазовращатель, при этом на первый вход первого умножителя поступает сигнал с емкостного датчика по оси вторичных колебаний, второй вход умножителя соединен с выходом фазовращателя устройства подавления квадратуры, выход второго умножителя соединен с парой силовых электродов по оси вторичных колебаний.
2. Микромеханический гироскоп по п.1, отличающийся тем, что между выходом емкостного датчика по оси первичных колебаний и парой силовых электродов по оси вторичных колебаний введен усилитель с постоянным коэффициентом усиления.
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2006 |
|
RU2301970C1 |
| ПЕШЕХОНОВ В.Г | |||
| и др | |||
| Результаты разработки микромеханического гироскопа | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Санкт-Петербург, с.268-274 | |||
| US 6553833 B1, 29.04.2003 | |||
| US 6370937 B2, 16.04.2002 | |||
| US 5992233 А, 30.11.1999. | |||

