Предлагаемое устройство относится к приборам, измеряющим угловую скорость, в частности к микромеханическим гироскопам (ММГ).
Известны ММГ компенсационного типа, в которых за счет обратной связи обеспечивается компенсация сил, обусловленных Кориолисовыми ускорениями [патент РФ №2393428 С1. Микромеханический гироскоп компенсационного типа].
Конструкция ММГ наиболее чувствительна к воздействию таких механических характеристик, как линейные вибрации, удары и ускорения вдоль оси первичных колебаний, и к изменению температуры. Перечисленные внешние воздействия приводят к изменению зазора между электродами, расположенными по оси вторичных колебаний. При этом изменяются характеристики датчиков угла и датчиков момента, в частности их коэффициенты передачи. Это может приводить к изменению масштабного коэффициента и смещения нуля, а также влиять на величину отрицательной жесткости и квадратурную помеху. Это приводит к появлению ошибок измерения в выходном сигнале ММГ.
Известны различные способы уменьшения влияния изменения зазора. В ряде патентов (см., например, пат. РФ №2289789 С1 и пат. США №6765305 В2) предложено решение для гироскопов прямого типа преобразования, заключающееся в измерении суммы токов, протекающих через электроды дифференциального емкостного датчика для выделения информации о зазоре, и в использовании полученного сигнала для коррекции масштабного коэффициента датчика угла.
Однако такой схемы компенсации изменения зазора в ММГ замкнутого типа недостаточно, т.к. от величины зазора зависит напряжение, приложенное к силовым электродам по оси вторичных колебаний, следовательно, коэффициент передачи этих электродов.
В заявке США №2009/0056443 А1 приведено решение, которое заключается в использовании силовой обратной связи с помощью дополнительных электродов (force balance plates) для поддержания величины зазора постоянной [фиг. 11-с этой заявки]. Также, в связи с тем что напряжения, приложенные к электродам, меняют параметры подвеса, то для компенсации изменения отрицательной жесткости и резонансной частоты предусмотрены специальные электроды (electric spring plates). Это позволяет работать как в разомкнутом, так и компенсационном режимах. Однако в патенте не приведен алгоритм измерения перемещения подвижной массы, и сама реализация дополнительных электродов требует дополнительных затрат.
Устройство, описанное в патенте РФ №2393428, является наиболее близким к предлагаемому устройству и выбрано в качестве прототипа. Оно содержит инерционную массу, гребенчатый двигатель, образованный гребенками статоров и ротора, устройство измерения перемещений инерционной массы по оси первичных колебаний, устройство измерения перемещений инерционной массы по оси вторичных колебаний, две пары электродов по оси вторичных колебаний, одна из которых является измерительной, другая - силовой, устройство возбуждения первичных колебаний, включенное между устройством измерения перемещений по оси первичных колебаний и электродами гребенчатого двигателя, последовательно включенные дифференцирующее звено и усилитель, включенные между устройством измерения перемещений по оси вторичных колебаний и парой силовых электродов по оси вторичных колебаний, последовательно включенные фазовращатель, умножитель и фильтр низкой частоты, вход фазовращателя подключен к выходу устройства измерения перемещений по оси первичных колебаний, а второй вход умножителя соединен с выходом усилителя, устройство подавления квадратуры, один вход которого подключен к выходу устройства измерения перемещений по оси первичных колебаний, второй вход устройства подавления квадратуры подключен к выходу устройства измерения перемещений по оси вторичных колебаний, выход устройства подавления квадратуры соединен с парой силовых электродов по оси вторичных колебаний, усилитель с постоянным коэффициентом усиления, включенный между устройством измерения перемещений по оси первичных колебаний и парой силовых электродов по оси вторичных колебаний.
Недостатком прототипа является то, что в нем не предусмотрен способ компенсации изменения зазора, что приводит к появлению ошибок измерения в выходном сигнале ММГ.
Задачей, на решение которой направлено изобретение, является уменьшение влияния линейных ускорений, вибраций и температуры на точностные характеристики микромеханического гироскопа компенсационного типа.
Решение указанной задачи достигается тем, что в компенсационный гироскоп введен дополнительный блок с изменяемым коэффициентом передачи, при этом один вход которого соединен с выходом фильтра низкой частоты, а на второй вход поступает сигнал с выхода устройства измерения перемещений, представляющего собой известную структуру емкостного датчика [патент РФ №2289789 С1], который позволяет определять синфазную и дифференциальную составляющую.
Заявленное устройство поясняется чертежами.
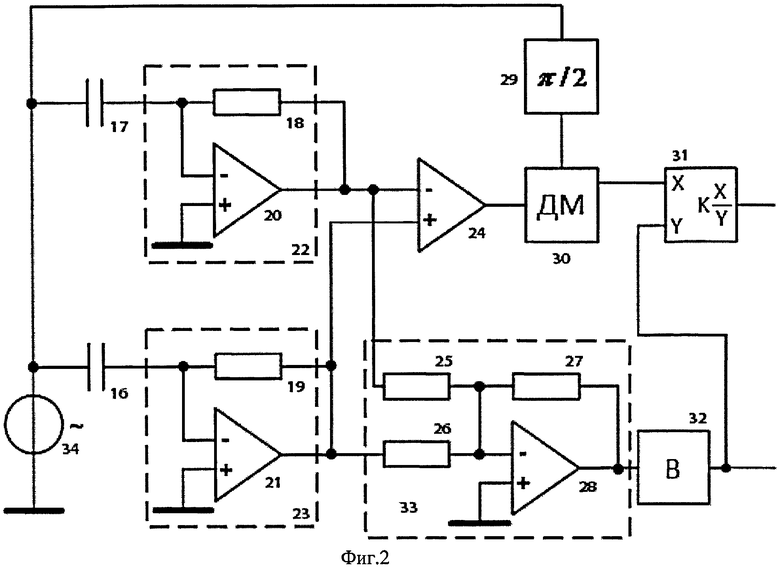
На фиг.1 приведена блок-схема предлагаемого устройства. На фиг.2 приведена блок-схема устройства измерения перемещений подвижной массы микромеханического гироскопа по оси вторичных колебаний.
На фиг.1 приняты следующие обозначения:
1 - чувствительный элемент (ЧЭ) микромеханического гироскопа;
2 - инерционная масса;
3 - измерительные электроды;
4 - силовые электроды;
5 - устройство возбуждения первичных колебаний;
6, 1 - устройства измерения перемещений;
8 - дифференцирующее звено;
9 - устройство подавления квадратуры;
10, 11 - усилители;
12 - умножитель;
13 - фильтр низкой частоты;
14 - устройство с изменяемым коэффициентом передачи;
15 - фазосдвигающее устройство.
На фиг.2 приняты следующие обозначения:
16, 17 - конденсаторы, образованные подвижной массой и статорами дифференциального емкостного датчика по оси вторичных колебаний;
18, 19, 25-27 - резисторы;
20, 21, 24 - операционные усилители;
22, 23 - трансрезистивные усилители;
28 - дифференциальный усилитель;
29 - фазосдвигающее устройство;
30 - демодулятор;
31 - устройство преобразования сигналов;
32 - выпрямитель;
33 - суммирующее устройство;
34 - генератор переменного напряжения.
Чувствительный элемент 1 состоит из инерционной массы 2, измерительных электродов по осям первичных и вторичных колебаний 3 и силовых электродов 4. К измерительным электродам 3 подключены устройства измерения перемещений 6 и 7. К выходу устройства измерения перемещений 7 по оси вторичных колебаний последовательно подключены дифференцирующее звено 8 и усилитель 11, первый вход устройства подавления квадратуры 9. Выход усилителя 11 соединен с силовыми электродами 4 ЧЭ 1. К выходу устройства измерения перемещений 6 по оси первичных колебаний подключены фазовращатель 15, второй вход устройства подавления квадратуры 9, устройство возбуждения первичных колебаний 5 и усилитель 10. Выход устройства подавления квадратуры 9, выход усилителя 10 и выход устройства возбуждения соединены с силовыми электродами 4 ЧЭ 1. Первый вход умножителя 12 соединен с выходом фазовращателя 15, а второй вход умножителя 12 соединен с выходом усилителя 11. Выход умножителя 11 соединен с входом фильтра низкой частоты 13. К выходу фильтра низкой частоты 13 подключено устройство с изменяемым коэффициентом передачи, второй вход которого подключен к выходу устройства измерения перемещений 7.
Устройство работает следующим образом.
Инерционная масса 2 под управлением устройства возбуждения первичных колебаний 5 совершает колебательные движения. При появлении переносной скорости основания относительно оси чувствительности возникают моменты сил Кориолиса, это вызывает вторичные угловые колебания ротора ММГ.
В контуре обратной связи, образованном дифференцирующим звеном 8 и усилителем 11, формируется сигнал управления, который возвращает инерционную массу в нейтральное положение.
Для системы с обратной связью сигнал управления определяется с помощью передаточной функции:
где Кос - коэффициент передачи в обратной связи; Мкор - входной момент, создаваемый силами Кориолиса; W(s) - передаточная функция объекта (разомкнутой цепи).
Т.к. для обеспечения компенсационного режима контурный коэффициент должен удовлетворять условию:

то выражение (1) принимает вид:
Момент, формируемый силовым электродом 4, определяется по формуле:
где ε - диэлектрическая проницаемость среды в зазоре между электродами; S - площадь электродов, образующих конденсаторы емкостных датчиков; x0 - начальный зазор между электродами;
Для дифференциального управления выражение (4) принимает вид:

где V1,2=V0±ΔV - напряжения, прикладываемые к силовым электродам;
V0 - постоянное напряжение смещения; ΔV - напряжение управления.
Откуда коэффициент передачи в обратной связи равен:
Соответственно, подставляя Кос в выражение (3), получаем зависимость сигнала управления Uупр от зазора x0:
Т.к. М изменяется по гармоническому закону:

где Ma - амплитуда; ωγ - частота первичных колебаний.
Таким образом, выходной сигнал с усилителя 11 поступает на умножитель 12, где перемножается с сигналом, сдвинутым фазовращателем 15 на 90° по отношению к напряжению на выходе устройства измерения перемещений 6 по оси первичных колебаний. Затем сигнал, содержащий только полезную составляющую, фильтруется на ФНЧ 13:
Принцип работы устройства измерения перемещений подробно рассмотрен в описании устройства патента РФ №2289789.
Сигналом, пропорциональным смещению подвижной массы, является выходной сигнал выпрямителя 32. Выделение этого сигнала поясняется фиг.2.
Для суммы токов, протекающих через электроды дифференциальных емкостных датчиков по оси вторичных колебаний, справедливо выражение:

Для плоскопараллельных дифференциальных емкостных датчиков можно считать, что емкости 16 и 17 изменяются в соответствии с выражениями:

х1, x2 - зазоры между электродами датчиков, которые пропорциональны величине:


Δx - смещение подвижной массы.
Из выражений (10-14) можно получить следующее выражение:
где U - напряжение на выходе генератора переменного напряжения 34; ω - угловая частота напряжения.
При малых (по сравнению с величиной зазора x0) перемещениях подвижной массы (Δx) выражение (15) примет вид:
Т.е. измеренная сумма токов обратно пропорциональна зазору между электродами. Следовательно, сигнал на втором выходе устройства измерения перемещений пропорционален величине:
Поэтому этот сигнал можно использовать в законе управления (в обработке информации) для компенсации изменения зазора в сигнале U13.
Для этого в устройстве с изменяемым коэффициентом передачи 14 реализован следующий алгоритм:

где Х, Y и Z - соответственно сигналы на первом и втором входах и выходе устройства с изменяемым коэффициентом передачи; К - коэффициент преобразования.
На основании формул (9, 17, 18) сигнал на выходе устройства с изменяемым коэффициентом передачи 14 пропорционален:

и не зависит от зазора.
Выходной сигнал устройства с изменяемым коэффициентом передачи является выходным сигналом ММГ, пропорциональным действующей угловой скорости основания ММГ.
Следовательно, наличие этого блока и введение в схеме измерения перемещения дополнительного сигнала о смещении ротора гироскопа позволяет компенсировать изменения характеристик силовых электродов при воздействии на ММГ вибраций и температуры.
Устройство с изменяемым коэффициентом передачи 14 может быть выполнено на основе аналоговых умножителей или с использованием цифровых процессоров. Суть изобретения не меняется при реализации отдельных элементов предложенного устройства на другой, кроме приводимой в качестве примера, элементной базе.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2010 |
|
RU2447402C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2008 |
|
RU2393428C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2006 |
|
RU2301970C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2008 |
|
RU2370733C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕКРЕСТНЫХ ЖЕСТКОСТИ И ДЕМПФИРОВАНИЯ ПОДВЕСА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП, В КОТОРОМ РЕАЛИЗОВАН ДАННЫЙ СПОСОБ | 2007 |
|
RU2346239C1 |
| ИНТЕРФЕЙСНОЕ УСТРОЙСТВО ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2006 |
|
RU2314495C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2010 |
|
RU2447403C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ СИГНАЛОВ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ВИБРАЦИОННОГО ТИПА | 2004 |
|
RU2274833C1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ЕЕ ОСНОВЕ | 2006 |
|
RU2320962C1 |
| СПОСОБ НАСТРОЙКИ ФАЗЫ ОПОРНОГО СИГНАЛА ДЕМОДУЛЯТОРА ВЫХОДНОГО ТРАКТА МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2014 |
|
RU2577369C1 |
Изобретение относится к приборам, измеряющим угловую скорость, в частности к микромеханическим гироскопам. Микромеханический гироскоп содержит инерционную массу, гребенчатый двигатель, устройства измерения перемещений инерционной массы, последовательно включенные фазовращатель, умножитель и фильтр низкой частоты, а также устройство с изменяемым коэффициентом передачи, реализующее следующую зависимость: Z=K·X·Y2, где X, Y - соответственно сигналы на первом и втором выходах устройства преобразования сигналов; Z - выходной сигнал управления; К - коэффициент преобразования. При этом один вход устройства с изменяемым коэффициентом передачи соединен с выходом фильтра низкой частоты, а на второй вход поступает сигнал с выхода устройства измерения перемещений по оси вторичных колебаний, который позволяет определять синфазную и дифференциальную составляющую. Изобретение позволяет уменьшить влияние линейных ускорений, вибраций и температуры на точностные характеристики микромеханического гироскопа компенсационного типа. 2 ил.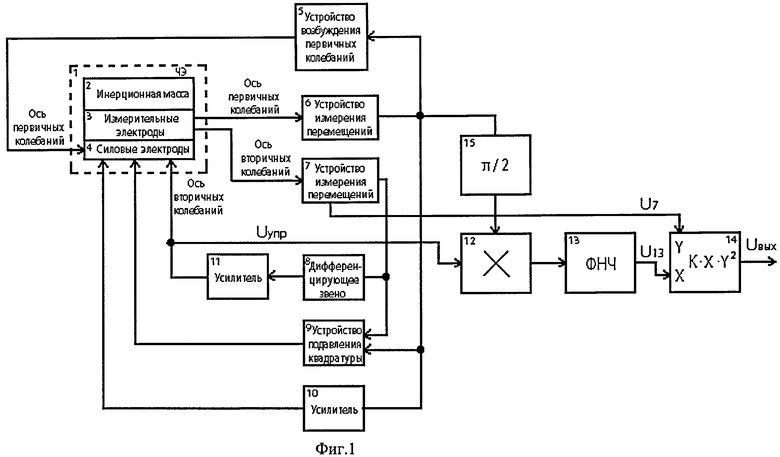
Микромеханический гироскоп компенсационного типа, содержащий инерционную массу, гребенчатый двигатель, образованный гребенками статоров и ротора, устройство измерения перемещений инерционной массы по оси первичных колебаний, устройство измерения перемещений инерционной массы по оси вторичных колебаний, имеющее два выхода, две пары электродов по оси вторичных колебаний, одна из которых является измерительной, другая - силовой, устройство возбуждения первичных колебаний, включенное между устройством измерения перемещений по оси первичных колебаний и электродами гребенчатого двигателя, последовательно включенные дифференцирующее звено и усилитель, включенные между первым выходом устройства измерения перемещений по оси вторичных колебаний и парой силовых электродов по оси вторичных колебаний, устройство подавления квадратуры, один вход которого подключен к выходу устройства измерения перемещений по оси первичных колебаний, второй вход устройства подавления квадратуры подключен к первому выходу устройства измерения перемещений по оси вторичных колебаний, выход устройства подавления квадратуры соединен с парой силовых электродов по оси вторичных колебаний, усилитель с постоянным коэффициентом усиления, включенный между устройством измерения перемещений по оси первичных колебаний и парой силовых электродов по оси вторичных колебаний, последовательно включенные фазовращатель, умножитель и фильтр низкой частоты, вход фазовращателя подключен к выходу устройства измерения перемещений по оси первичных колебаний, а второй вход умножителя соединен с выходом усилителя, отличающийся тем, что в него дополнительно введено устройство с изменяемым коэффициентом передачи, соединенное с выходом фильтра низкой частоты, а второй вход устройства с изменяемым коэффициентом передачи соединен со вторым выходом устройства измерения перемещений по оси вторичных колебаний, при этом устройство с изменяемым коэффициентом передачи реализует следующую зависимость: Z=К·Х·Y2,
где X, Y и Z - соответственно сигналы на первом и втором входах и выходе устройства с изменяемым коэффициентом передачи; К - коэффициент преобразования.
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП КОМПЕНСАЦИОННОГО ТИПА | 2008 |
|
RU2393428C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ПЕРВИЧНЫХ КОЛЕБАНИЙ | 2005 |
|
RU2289789C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2006 |
|
RU2301970C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 7444869 B2, 04.11.2008. | |||

