Изобретение относится к области радиотехники, в частности к способу обнаружения спутников, как в условиях априорной неопределенности, так и в условиях, когда известна априорная информация, полученная посредством соединения с сервером, например, в режиме Assisted Global Positional System.
При запуске GPS приемника важную роль играет время обнаружения определенного числа сигналов спутников, которые позволяют определить позицию пользователя. Время, затраченное на попытку поиска каждого сигнала спутников, зависит от нескольких факторов, наиболее значимыми из которых являются размеры окон поиска сигнала по частоте и по временному положению, а также время наблюдения сигнала, прежде всего определяющее чувствительность приемника к слабым сигналам, а также ресурсоемкость поиска.
В случае программной реализации приемника прежде всего ресурсоемкость поиска определяет время, необходимое для поиска сигналов спутников.
Существует несколько способов уменьшить время поиска требуемого числа сигналов. Один из таких способов предполагает использование нескольких режимов поиска, один из которых наименее ресурсоемок и позволяет быстро обнаруживать сильные сигналы спутников, но при этом обладает низкой чувствительностью, т.е. не способен обнаруживать слабые сигналы спутников, другой режим более чувствителен, но и более ресурсоемок, и т.п. Таким образом, на поиск сильных сигналов спутников затрачивается меньше времени, чем на поиск остальных сигналов спутников.
Например, в патенте US №7,002,514 "Using Multiple Detection Algorithms in Positioning Signal Processing", Feb. 21, 2006 [1] предлагают использовать несколько режимов поиска. При этом в первом режиме, менее чувствительном и ресурсоемком, осуществляют поиск одного сильного сигнала спутника, по характеристикам которого осуществляется более точный и более ресурсоемкий поиск следующих сигналов.
Подобная процедура поиска описана и в патенте US №7,209,706 "Cross Correlation Mitigation Method and Apparatus for USE in a Global Position System Receiver" [2].
Недостатком упомянутых способов обнаружения сигналов спутников, особенно в случае их программной реализации, является отсутствие четкого порядка, в котором осуществляется поиск сигналов спутников. Одновременный поиск сигналов нескольких или всех спутников в случае программной реализации приемника оказывается очень ресурсоемким, что может затруднить или даже исключить возможность выполнения других задач, выполняемых на том же процессоре, что является существенным недостатком с точки зрения пользователя. В то же время последовательный поиск одного сигнала за другим оказывается длительным во времени, и желательно его ускорить, выполняя, в первую очередь, поиск тех сигналов, вероятность обнаружения которых больше всех остальных, или такой поиск будет наименее ресурсоемким (окна поиска по частоте и временному положению для данного сигнала наименьшие).
Такой подход реализован в следующих технических решениях:
патент US №7,250,904 "Navigation Satellite Acquisition in Satellite 25 Positioning System Receiver", Jul. 31, 2007 [3] и заявка US№2007/0229351 "Cold Start Satellite Search Method" [4].
Однако недостатками данных способов поиска являются отсутствие нескольких режимов поиска и невозможность использования какой-либо дополнительной априорной информации, ускоряющей поиск (например, информации, позволяющей сузить окно поиска для конкретного сигнала и тем самым снизить ресурсоемкость процедуры поиска этого сигнала).
Наиболее близким к предлагаемому способу поиска сигналов спутников является способ, описанный в патенте US №6,873,910 "Procedure for Searching Position Determination Signals Using a Plurality of Search Modes", Mar. 29, 2005 [5].
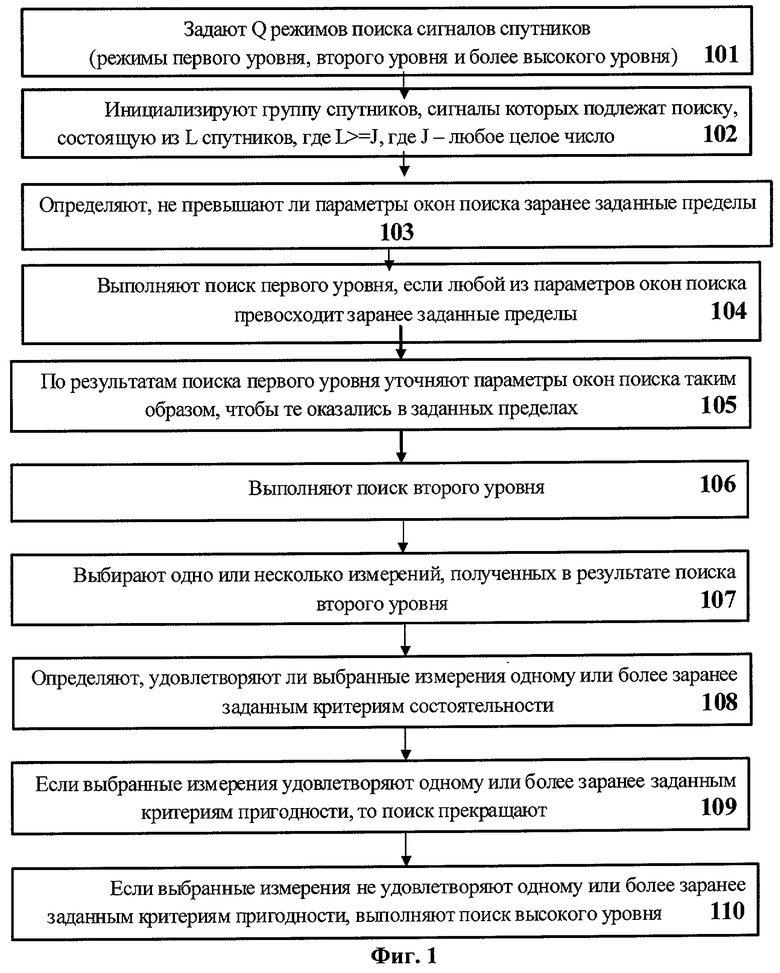
Структурная схема алгоритма, описанного в [5], приведена на фиг.1 и заключается в следующем:
- Предварительно задают Q режимов поиска, где Q≥3 (например, Q различных времен наблюдения), причем чувствительность увеличивается с уровнем режима. Это следующие режимы: режим первого уровня, режим второго уровня и, как минимум, один режим более высокого уровня.
- На приемной стороне пользователя (в приемнике) инициализируют группу спутников, подлежащих поиску, состоящую из L спутников, где L≥J, где J - любое целое число. Если известна какая-либо вспомогательная информация, группа инициализируется согласно ей, если нет, то в группу входят все спутники GPS (Global Positional System).
- Определяют, не превышают ли параметры окон поиска заранее заданные пределы.
- Если любой из параметров окон поиска превосходит заранее заданные пределы, то выполняют поиск первого уровня.
- По результатам поиска первого уровня уточняют параметры окон поиска таким образом, чтобы те оказались в заданных пределах.
- Выполняют поиск второго уровня.
- Выбирают одно или несколько измерений, полученных в результате поиска второго уровня.
- Определяют, удовлетворяют ли выбранные измерения одному или более заранее заданным критериям состоятельности.
- Если выбранные измерения удовлетворяют одному или более заранее заданным критериям состоятельности, то дальнейший поиск прекращают.
- Если выбранные измерения не удовлетворяют одному или более заранее заданным критериям состоятельности, выполняют поиск более высокого уровня.
В описанном способе-прототипе предлагается использовать несколько режимов поиска сигналов спутников, при этом каждый последующий из режимов обладает большей чувствительностью, но и большей ресурсоемкостью, при этом переход от поиска в текущем режиме к поиску в следующем режиме осуществляется, если результаты текущего поиска не удовлетворяют определенным критериям, но характеристики обнаруженных сигналов спутников не учитывают при последующем поиске.
Задача, на решение которой направлено заявляемое изобретение, - это уменьшение времени поиска, необходимого для обнаружения заданного количества сигналов спутников.
Технический результат достигается за счет разработки нового способа поиска сигналов спутников, заключающегося в выполнении следующих операций:
- на принимающей стороне пользователя:
предварительно задают Q режимов поиска сигналов спутников, где Q>1, причем каждый последующий режим поиска отличается от предыдущего большим временным интервалом наблюдения сигналов спутников и возможностью на каждом последующем режиме поиска обнаруживать сигналы спутников с меньшей мощностью,
определяют условия, которым должны соответствовать весовые коэффициенты сигналов спутников, чтобы их поиск осуществлялся в заданном режиме, причем условия определяют таким образом, чтобы значение весового коэффициента могло удовлетворять только одному из этих условий, или не удовлетворять ни одному из них,
задают максимальное число спутников l, за которыми принимающая сторона пользователя может выполнять одновременное слежение, где l≥3,
формируют процедуру расчета весовых коэффициентов сигналов спутников и их обновления и запоминают ее,
каждому сигналу спутника присваивают порядковый номер,
при этом
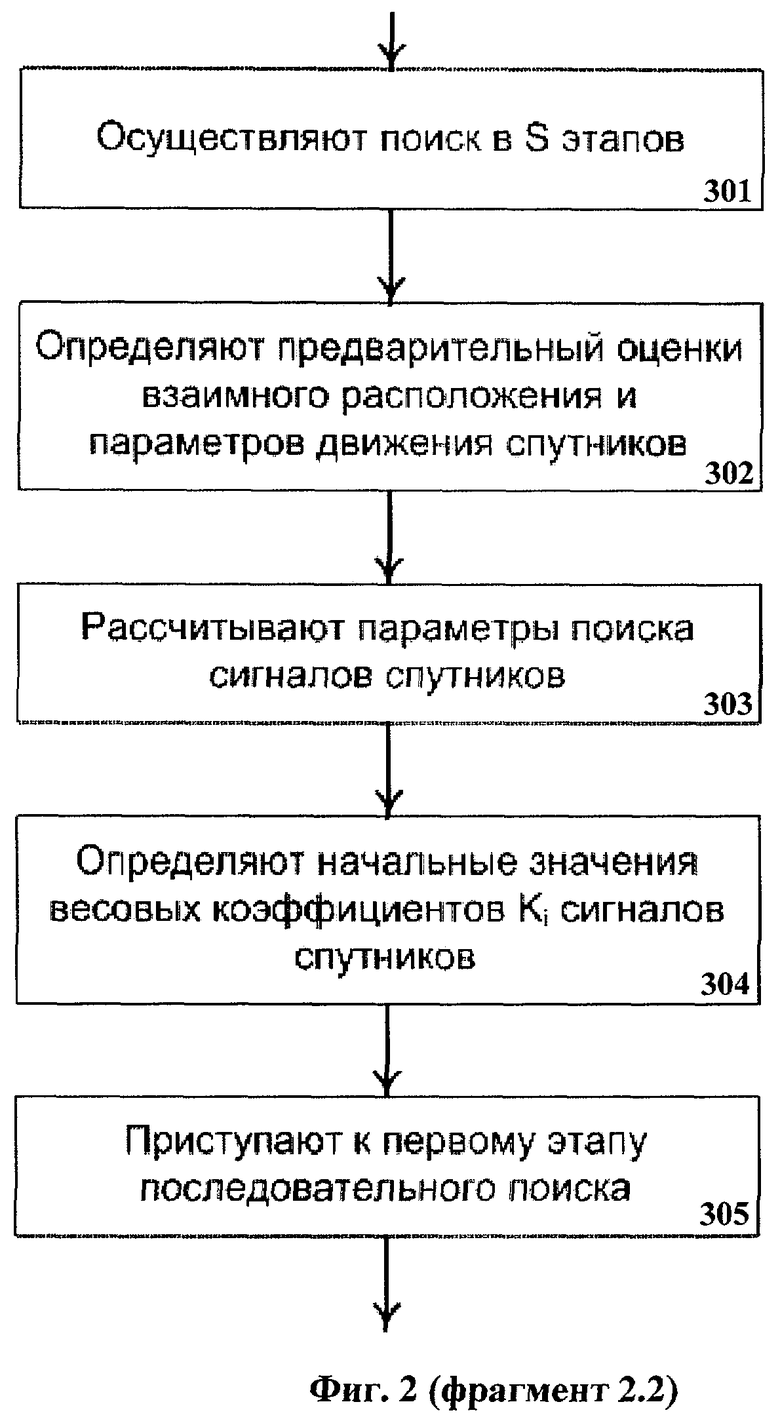
осуществляют поиск сигналов спутников в S этапов, где S≥1, для чего:
определяют предварительные оценки взаимного расположения и параметров движения спутников, используя информацию об их предыдущих значениях, или информацию, полученную посредством соединения с сервером, или предварительно записанную информацию о возможных значениях этих параметров,
используя полученные предварительные оценки взаимного расположения и параметров движения спутников, рассчитывают параметры поиска этих сигналов,
определяют начальные значения весовых коэффициентов сигналов спутников Ki по предварительно сформированной процедуре расчета весовых коэффициентов сигналов спутников, используя полученные предварительные оценки параметров поиска сигналов спутников,
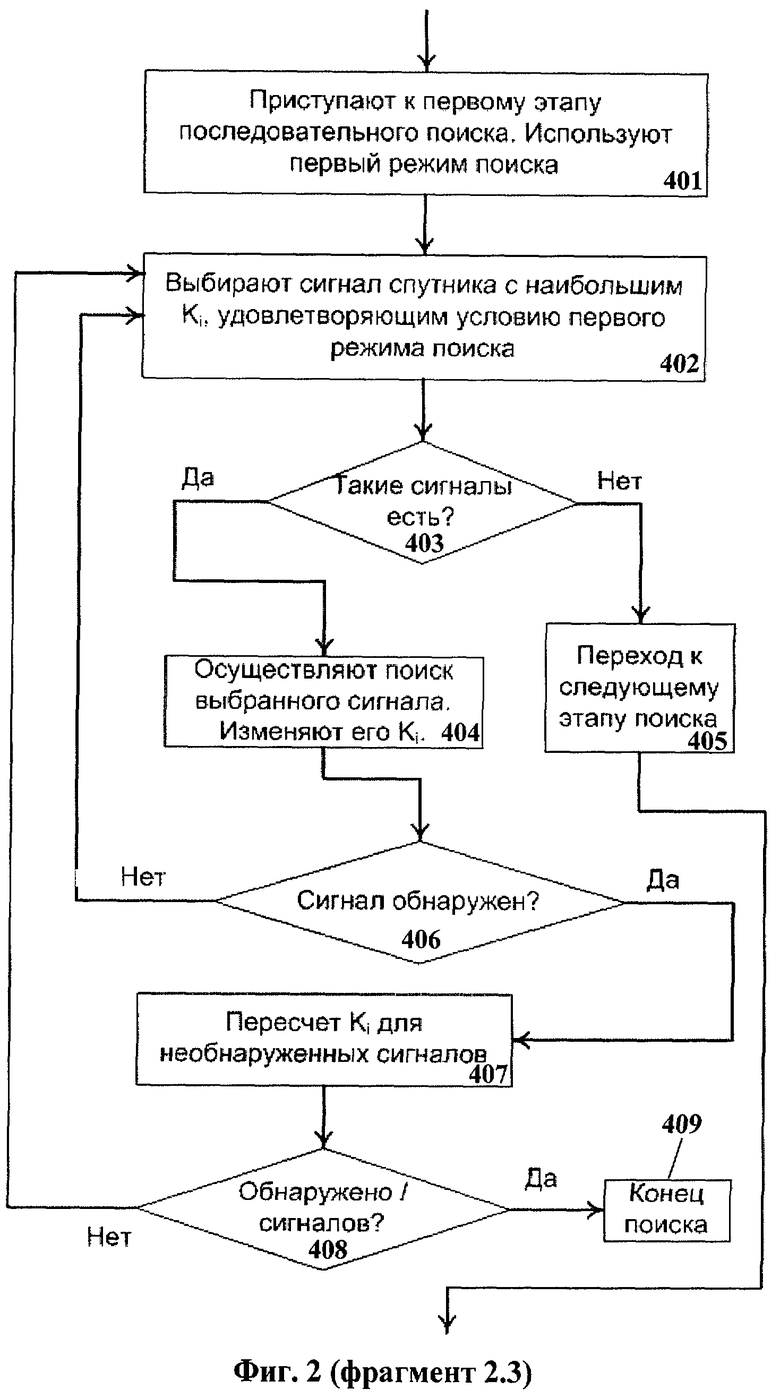
на первом этапе последовательно выполняют поиск сигналов спутников, весовые коэффициенты которых удовлетворяют условию первого режима поиска, при этом используют рассчитанные параметры поиска сигналов этих спутников, поиск каждого сигнала спутника выполняют один раз,
причем поиск сигналов спутников осуществляют в порядке убывания значений весовых коэффициентов сигналов спутников,
если значения весовых коэффициентов сигналов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания порядковых номеров сигналов спутников,
после обнаружения сигнала спутника или попытки обнаружения его сигнала весовой коэффициент этого сигнала изменяют, используя заранее сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, таким образом, чтобы он удовлетворял условию следующего режима поиска,
если сигнал спутника в результате поиска обнаружен, начинают обработку навигационного сигнала от данного спутника, и пересчитывают весовые коэффициенты для необнаруженных сигналов спутников, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления,
если обнаруженными оказываются менее l сигналов, то последовательно в порядке убывания соответствующих им измененных весовых коэффициентов продолжают поиск сигналов оставшихся спутников, весовые коэффициенты сигналов которых удовлетворяют условию первого режима поиска, и сигналы которых не обрабатывают в данный момент,
если сигналы l спутников обнаружены на первом этапе поиска, то поиск прекращают,
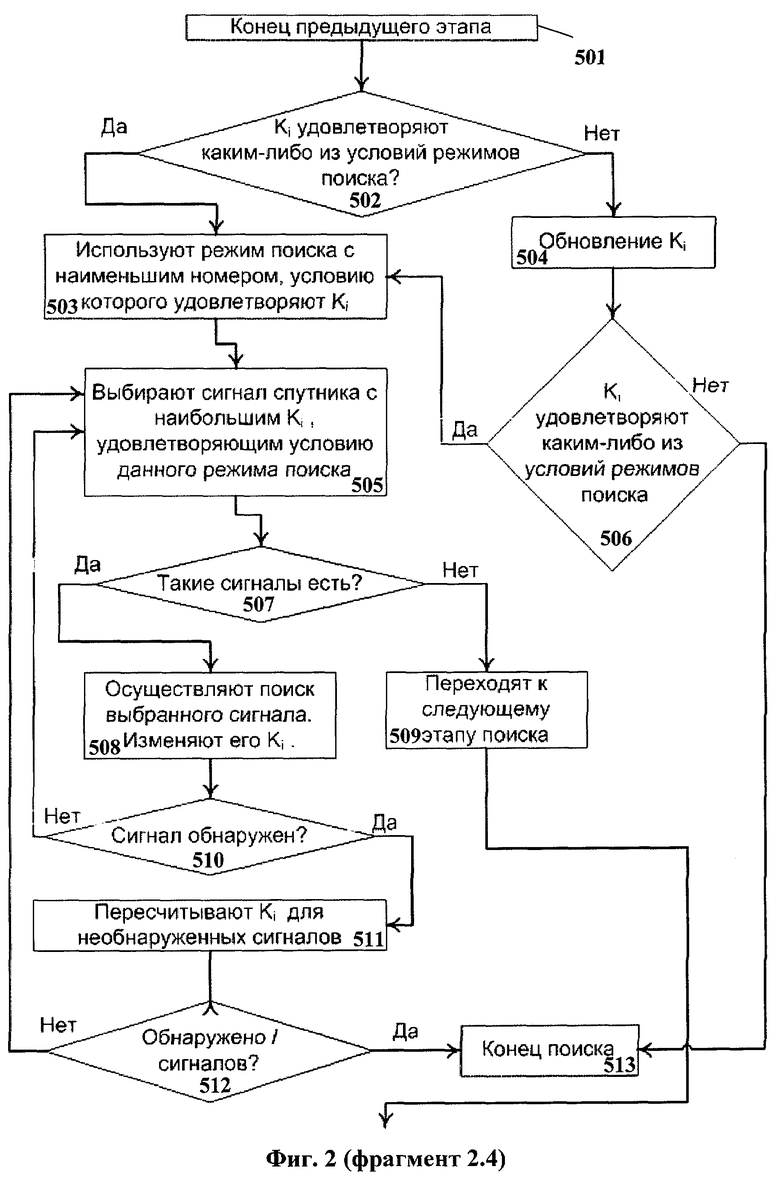
если число обнаруженных сигналов спутников на первом этапе меньше l, тогда переходят к следующему этапу поиска, для чего используют режим поиска с наименьшим номером, условию которого удовлетворяют весовые коэффициенты сигналов необнаруженных спутников,
порядок поиска необнаруженных сигналов спутников осуществляют в порядке убывания значений весовых коэффициентов сигналов спутников, если значения весовых коэффициентов сигналов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания порядковых номеров сигналов спутников,
если на данном этапе используют режим поиска с номером, меньшим Q, то после обнаружения сигнала спутника или попытки обнаружения его сигнала весовой коэффициент этого сигнала изменяют, используя заранее сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, таким образом, чтобы весовой коэффициент этого сигнала удовлетворял условию следующего режима поиска,
если на данном этапе используется режим поиска с номером, равным Q, то после обнаружения сигнала спутника или попытки обнаружения его сигнала весовой коэффициент этого сигнала изменяют, используя заранее сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, таким образом, чтобы весовой коэффициент этого сигнала не удовлетворял ни одному из условий заданных режимов поиска,
если сигнал спутника в результате поиска обнаружен, начинают обработку навигационного сигнала от данного спутника и пересчитывают весовые коэффициенты для всех необнаруженных сигналов спутников, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления,
если сигналы l спутников обнаружены на текущем и предыдущих этапах поиска, то поиск прекращают,
если число обнаруженных сигналов спутников на текущем и предыдущих этапах поиска меньше l, тогда переходят к следующему этапу поиска, для чего используют режим поиска с наименьшим номером, условию которого удовлетворяют весовые коэффициенты сигналов необнаруженных спутников,
если весовые коэффициенты сигналов всех необнаруженных спутников не удовлетворяют ни одному из условий режимов поиска, тогда, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников, их обновляют,
поиск продолжают до тех пор, пока будут обнаружены l сигналов спутников или пока не останется сигналов спутников, чьи весовые коэффициенты удовлетворяют условиям режимов поиска после обновления,
если обработка навигационного сигнала от обнаруженного спутника в силу каких-либо обстоятельств невозможна, то данный сигнал спутника считают необнаруженным, его обработку прекращают, и, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, пересчитывают весовые коэффициенты для всех необнаруженных сигналов спутников, процедуру поиска продолжают.
Следует учесть, что Q режимов поиска сигналов спутников характеризуются для каждого режима поиска заданным числом одинаковых по длительности интервалов когерентного накопления сигнала, полученные значения когерентных накоплений сигнала суммируют некогерентно, причем заданное число интервалов когерентного накопления сигнала возрастает на каждом последующем режиме поиска, увеличивая, таким образом, чувствительность к уровню сигнала на каждом последующем режиме поиска.
Условие, которому должен соответствовать весовой коэффициент Ki сигнала спутника, чтобы его поиск осуществлялся в j-том режиме, определяют по формуле
Q-j+1>Ki≥Q-j+h,
где 1>h≥0,
например, h=0.01,
3>Ki>=2+h - сигнал удовлетворяет условию первого режима поиска, если число режимов Q=3,
2>Ki>=1+h - сигнал удовлетворяет условию второго режима поиска, если число режимов Q=3,
1>Ki>=0+h - сигнал удовлетворяет условию третьего режима поиска, если число режимов Q=3,
где 1>h>=0, например, h=0.01,
иные значения Ki - сигнал не удовлетворяет ни одному из условий режимов поиска.
Процедуру расчета весовых коэффициентов Ki сигналов спутников и их обновления формируют по формуле
Ki=Mi·(Ai+Pi·H+(1-Н)·(1-Fi/FM)·(1-Ti/TM)),
где Mi=±1 - коэффициент, определяющий знак Ki,
Ai - целое число, заданное для данного спутника,
Pi - вероятность обнаружения i-ого сигнала спутника, 1>=Pi>=0,
1>H>h, при этом Н заданное значение и равно constant,
Fi>0 - значение окна поиска по частоте для i-го сигнала спутника - диапазон изменения возможного значения частоты принимаемого сигнала,
FM - максимальное значение окна поиска по частоте, определяемое максимальной скоростью движения спутника относительно пользователя и техническими особенностями приемного устройства пользователя, при этом FM - заданное значение и равно constant,
Ti>0 - значение окна поиска по временной задержке для i-того сигнала спутника - диапазон изменения возможного значения временной задержки сигнала,
TM - максимальное значение окна поиска по временной задержке, при этом TM - заданное значение и равно constant,
причем Ti<TM, Fi<FM,
при этом в начале поиска в качестве значений А для всех сигналов спутников берут целое число, равное числу режимов поиска Q, минус единица, в качестве М для всех сигналов спутников берут единицу, в качестве значений Pi используют предварительно вычисленные значения вероятностей обнаружения, Fi и Ti - соответственно рассчитанные значения окон поиска по частоте и временной задержке для i-го сигнала спутника, если Pi>0, а если Pi=0, то в качестве значений Fi и Ti используют соответственно заданные значения FM и TM, равные constant,
после обнаружения сигнала спутника или попытки его обнаружения значения Ai и Mi изменяют таким образом, что если Ai>0, то значение Ai для данного сигнала спутника уменьшают на единицу, а значение Mi не изменяют, если Ai=0, то значение Mi для данного сигнала спутника берут равным минус единице, а значение А, не изменяют,
при обнаружении сигнала спутника для всех необнаруженных сигналов спутников пересчитывают вероятности Pi обнаружения сигналов спутников, кроме тех, для которых значения Pi=0 или Pi=1,
если весовые коэффициенты сигналов всех необнаруженных спутников не удовлетворяют ни одному из условий режимов поиска, тогда значение Mi для каждого из данных сигналов спутников берут равным плюс единице,
если обработка навигационного сигнал от обнаруженного спутника невозможна, то пересчитывают вероятности Pi обнаружения сигналов спутников.
Предварительными оценками взаимного расположения и параметров движения спутников являются диапазоны возможных значений углов возвышения спутников относительно предполагаемого местонахождения пользователя, возможных значений радиальных скоростей спутников относительно пользователя, возможных расстояний от спутников до предполагаемого местонахождения пользователя и предварительно вычисленные значения вероятностей обнаружения каждого сигнала спутника.
Параметрами поиска для каждого сигнала спутника являются рассчитанные значения окон поиска по частоте и временной задержке для данного сигнала спутника.
Таким образом, заявляемый способ поиска сигналов спутников по сравнению с известным уровнем техники позволяет существенно уменьшить время поиска, необходимое для обнаружения заданного количества сигналов спутников. Это преимущество достигается за счет того, что последовательный поиск сигналов спутников осуществляют в заданном порядке согласно изобретению, а именно в первую очередь осуществляют поиск сигналов спутников, для которых примерно известны окна поиска по частоте и временному положению, во вторую очередь осуществляют поиск сигналов спутников, для которых известны только окна поиска по частоте, а затем всех остальных сигналов спутников, для которых окна поиска неизвестны. Таким образом, сначала осуществляют поиск сигналов спутников, чей поиск наименее ресурсоемок, что значительно сокращает общее время обнаружения заданного числа сигналов спутников. При этом последовательный поиск позволяет существенно уменьшить использование ресурсов процессора приемника пользователя, а неиспользуемые ресурсы (возможности) приемника направить для выполнения других задач.
Кроме того, заявляемый способ поиска сигналов спутников предполагает использование Q режимов поиска сигналов спутников, при котором последовательный поиск сначала выполняют в наиболее быстром, но менее чувствительном режиме, что позволяет очень быстро обнаружить сильные сигналы спутников, а лишь затем осуществляют поиск в более чувствительных и более долгих по времени режимах.
Далее описание изобретения поясняется примерами выполнения и чертежами.
На фиг.1 выполнена структурная схема алгоритма прототипа.
На фиг.2 (фрагменты 2.1, 2.2, 2.3 и 2.4) выполнена структурная схема алгоритма заявляемого способа поиска сигналов спутников.
На фиг.3-11 для лучшего понимания реализации заявляемого способа показан пример выполнения последовательности действий поиска сигналов спутников, необходимых для осуществления изобретения и достижения указанного выше технического результата.
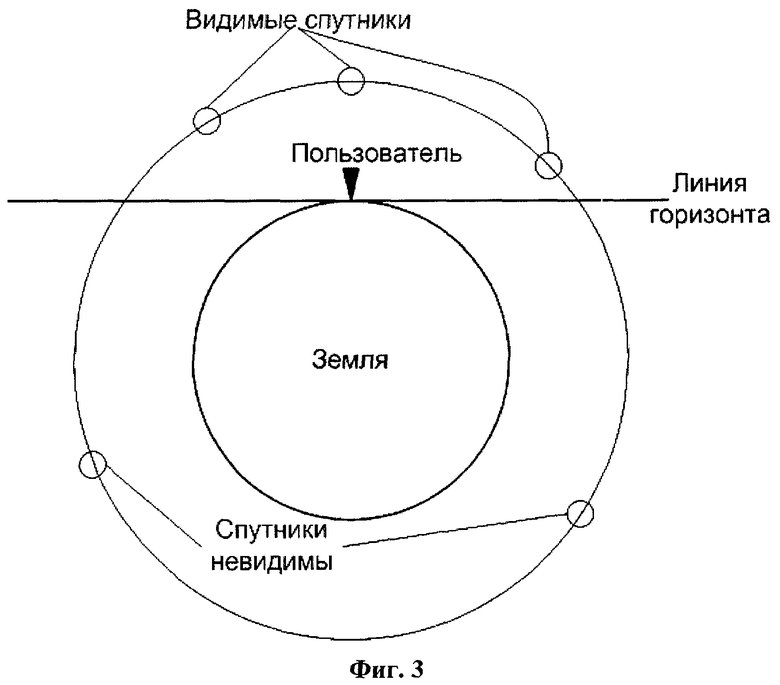
На фиг.3 показано положение спутников относительно линии горизонта пользователя.
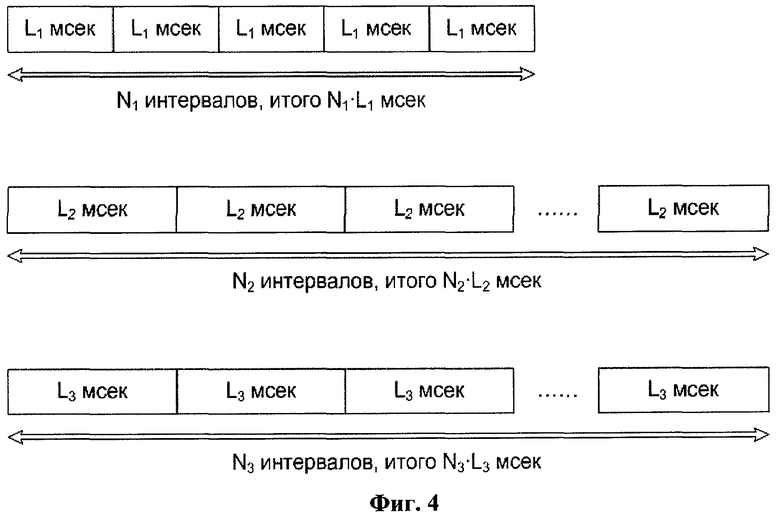
На фиг.4 приведены три режима поиска сигналов спутников, характеризующиеся для каждого режима поиска заданным числом одинаковых по длительности интервалов когерентного накопления сигнала.
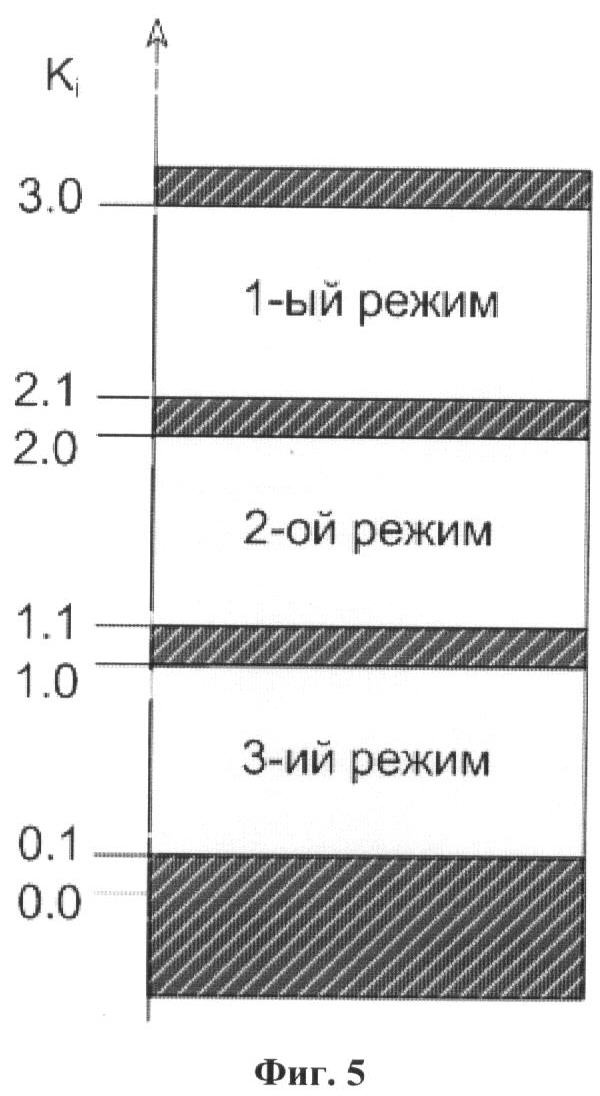
На фиг.5 приведены условия, которым должен соответствовать весовой коэффициент Ki сигнала спутника, чтобы его поиск осуществлялся в заданном режиме.
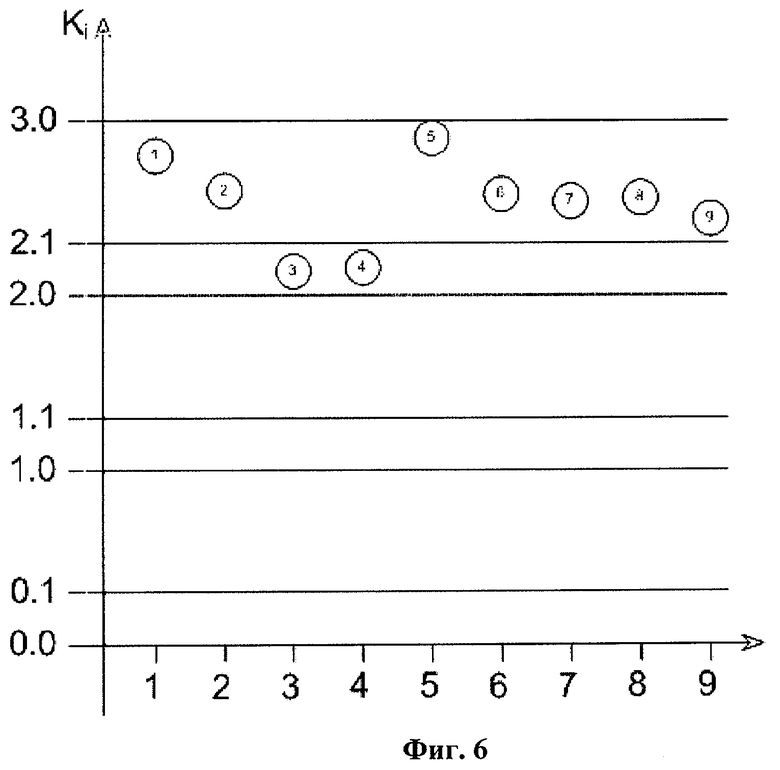
На фиг.6 приведены значения весовых коэффициентов, например, для первых девяти сигналов спутников, причем показано, что сигнал спутника с наибольшим весовым коэффициентом имеет номер 5.
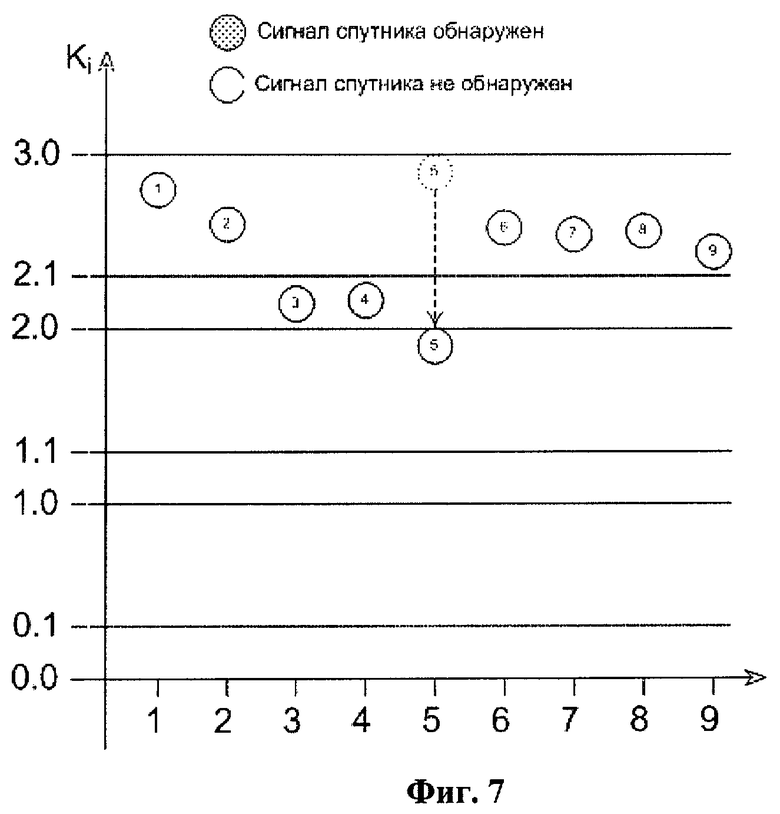
На фиг.7 показано, например, что сигнал спутника под номером 5 не обнаруживают и изменяют его весовой коэффициент.
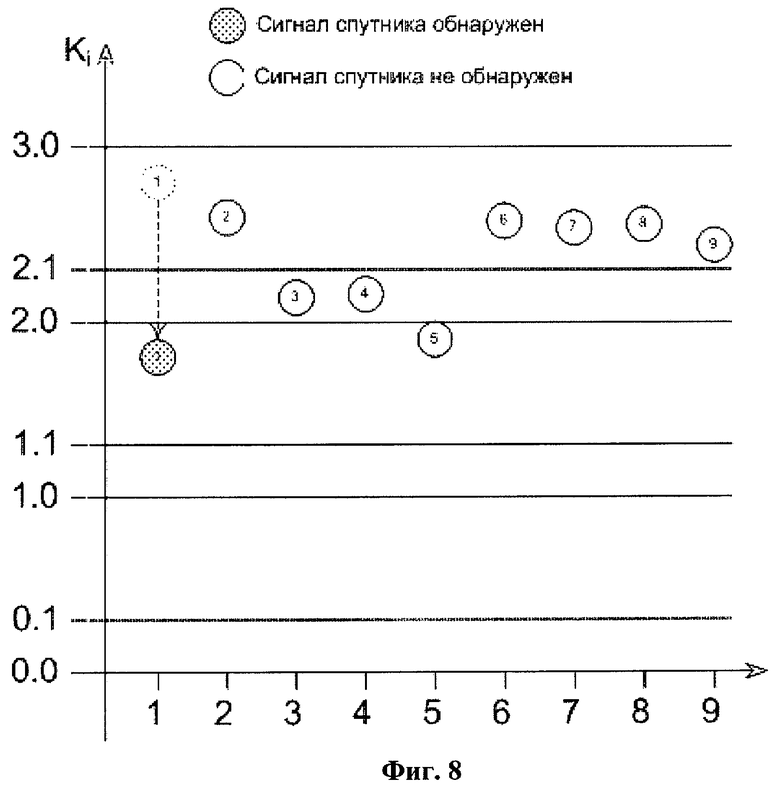
На фиг.8 показано, что сигнал спутника под номером 1 обнаруживают и изменяют его весовой коэффициент.
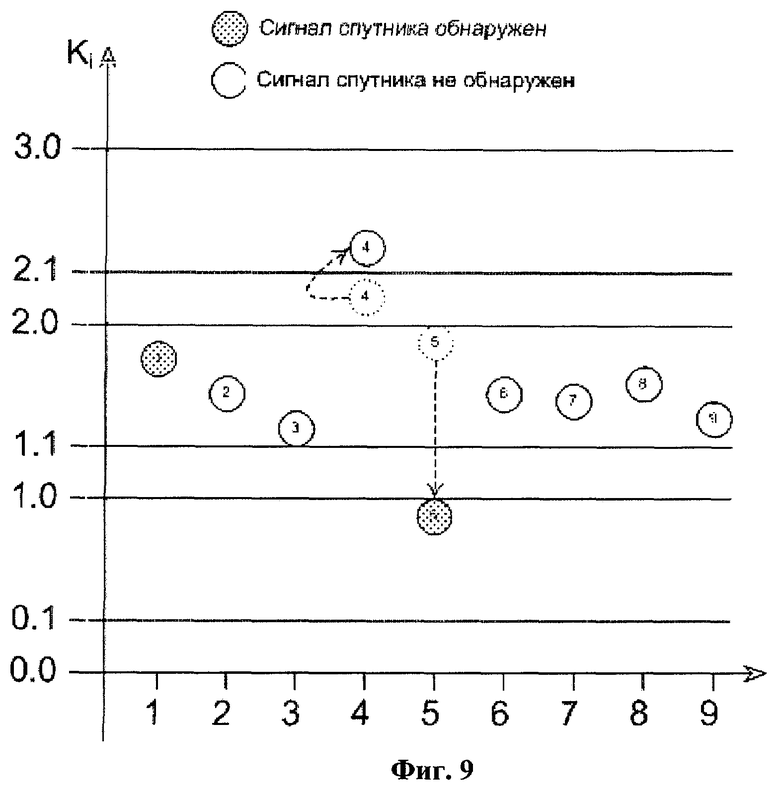
На фиг.9 показано, что сигнал спутника под номером 5 обнаружен на втором этапе поиска, и изменяют его весовой коэффициент. Также отражено, что для спутника под номером 4 произошло качественное изменение его весового коэффициента.
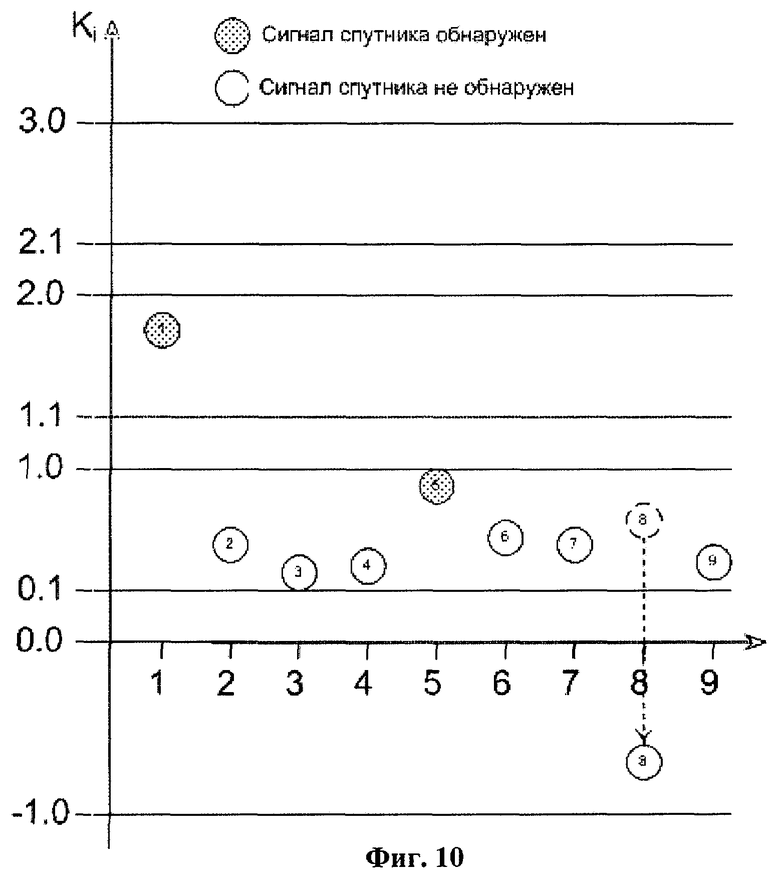
На фиг.10 показано, что сигнал спутника под номером 8 не обнаруживают и изменяют его весовой коэффициент.
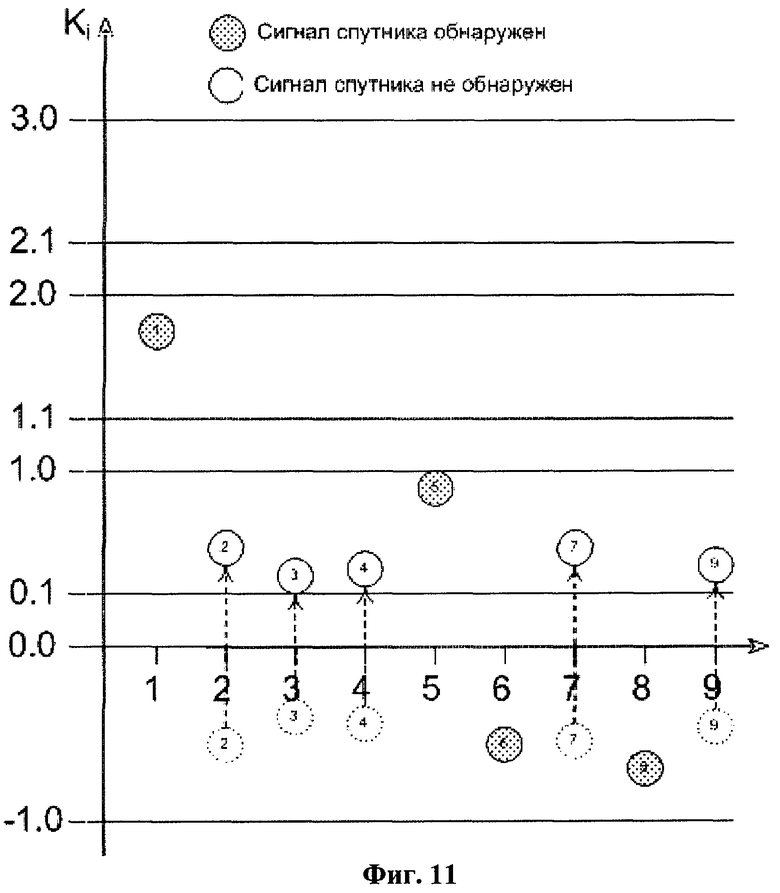
На фиг.11 показано, что для всех сигналов спутников, необнаруженных при поиске с использование третьего режима, обновляют весовые коэффициенты.
Осуществляют изобретение следующим образом (фиг.2-11). При этом параллельно будем обращаться к фиг.2 (фрагменты 2.1, 2.2, 2.3 и 2.4), на которых в виде структурной схемы выполнен алгоритм заявляемого способа поиска сигналов спутников, и к фиг.3-11, которые иллюстрируют примеры его выполнения.
Рассмотрим фиг.2.1, на которой выполнена структурная схема начала алгоритма заявляемого способа поиска сигналов спутников, и фиг.3, на которой показано местонахождение пользователя относительно линии горизонта, когда он находится в зоне, например, трех видимых спутников и двух невидимых спутников (за линией горизонта).
На принимающей стороне пользователя (в приемнике) предварительно задают Q режимов поиска сигналов спутников, например 3 режима поиска, имеющие следующие характеристики (см. фиг.2.1 и 4):
1-ый режим предполагает N1 интервалов когерентного накопления сигнала, длительность каждого из которых равно L1 мсек. Полученные значения когерентных накоплений сигнала суммируются некогерентно. Таким образом, общее время накопления сигнала составляет N1·L1 мсек.
2-ой режим предполагает N2 интервалов когерентного накопления сигнала, длительность каждого из которых равно L2 мсек. Полученные значения когерентных накоплений сигнала суммируются некогерентно. Таким образом, общее время накопления сигнала составляет N2·L2 мсек.
3-ий режим предполагает N3 интервалов когерентного накопления сигнала, длительность каждого из которых равно L3 мсек. Полученные значения когерентных накоплений сигнала суммируются некогерентно. Таким образом, общее время накопления сигнала составляет N3·L3 мсек.
При этом N1<N2<N3, где N - целое положительное, и L1≤L2≤L3, где L - целое положительное.
Благодаря увеличивающемуся времени накопления каждый последующий режим позволяет обнаруживать более слабые сигналы. Однако увеличение времени накопления приводит к увеличению числа математических операций, осуществляемых над сигналом, а следовательно, к большей ресурсоемкости режима. Таким образом, предоставляется возможность создать универсальный приемник, который позволит осуществить как быстрый поиск с меньшими вычислительными затратами, так и более точный поиск сигналов спутников, но с большими вычислительными затратами.
Определяют условия, которым должен соответствовать весовой коэффициент Ki сигнала спутника, чтобы его поиск осуществлялся в конкретном режиме, следующим образом (фиг.2.1 и 5):
3>Ki≥2.01 - удовлетворяет условию первого режима поиска,
2>Ki≥1.01 - удовлетворяет условию первого режима поиска,
1>Ki≥0.01 - удовлетворяет условию первого режима поиска,
иные значения Ki - сигнал не удовлетворяет ни одному из условий режимов поиска.
Задают максимальное число спутников, например 8, за которыми приемник пользователя может выполнять одновременное слежение,
запоминают следующую формулу расчета весовых коэффициентов:

где Mi=±1 - коэффициент, определяющий знак Ki,
Ai - целое число, заданное для данного спутника,
Pi - вероятность обнаружения i-ого сигнала спутника, 1>=Pi>=0,
Fi>0 - значение окна поиска по частоте для i-го сигнала спутника - диапазон изменения возможного значения частоты принимаемого сигнала,
Ti>0 - значение окна поиска по временной задержке для i-го сигнала спутника - диапазон изменения возможного значения временной задержки сигнала.
В упомянутой формуле (*) 10000 Гц - максимальное окно поиска по частоте, обусловленное максимально возможным доплеровским смещением частоты принимаемого сигнала, равным ±5000 Гц, а 1 мсек - период М-последовательности, модулирующей сигнал, определяющей максимальное значение расстройки по времени между принимаемым и опорным сигналами.
Каждому сигналу спутника присваивают порядковый номер.
Осуществляют поиск сигналов спутников (фиг.2.2) в S этапов, где S≥1, для чего проверяют, доступны ли параметры орбитального движения спутников, например оперативная информация (эфемериды) и неоперативная информация (альманахи) (см. «Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ» (редакция 5.0). Координационный научно-информационный центр. Москва, 2002 г., с.21, п.4.2. Содержание навигационного сообщения, http://www.glonass-center.ru) [6].
Для этого проверяют, доступно ли соединение с сервером, посредством которого они могут быть получены, а также проверяют наличие этих параметров, полученных при предыдущих включениях приемника. Далее проверяют, известно ли время или его оценка, в которое осуществляется поиск сигналов, известна ли позиция пользователя или ее оценка.
В случае известной оценки времени и оценки позиции пользователя для тех спутников, для которых доступны альманах и эфемериды, определяют предварительные оценки взаимного расположения и параметров движения - диапазоны возможных значений угла возвышения спутников относительно пользователя, диапазоны возможных значений скоростей спутников относительно пользователя и диапазоны возможных расстояний от пользователя до спутника.
В случае если это невозможно, углы возвышения, расстояния и скорости спутников считают неизвестными.
Используя предварительно полученные диапазоны возможных скоростей и углов возвышения, рассчитывают размеры окон поиска Fi по частоте и Тi по временной задержке - параметры поиска этих сигналов, таким образом, что 10000 Гц≥Fi>0, и 1 мсек≥Ti>0. Для тех спутников, для которых углы возвышения, расстояния и скорости спутников считают неизвестными, берут Fi=10000 Гц и Ti=1 мсек.
Определяют начальные значения весовых коэффициентов сигналов спутников Ki по формуле (*), где для всех спутников в качестве Mi берут единицу, в качестве Ai берут двойку, в качестве Pi выбирают одно из следующих значений:
Pi=1 - для спутников, для которых угол возвышения может принимать только положительные значения (нижняя граница диапазон выше нуля),
Pi=0 - для спутников, для которых угол возвышения может принимать только отрицательные значения (верхняя граница диапазона ниже нуля).
Для остальных спутников берут условную вероятность их наличия при условии, что обнаружены те спутники, для которых Pi=1, и не обнаружены те, для которых Pi=0. В случае, если нет спутников, для которых Pi=1 или Pi=0, для всех спутников берут Pi=0.38.
В качестве Fi и Ti используют их предварительно рассчитанные значения: если Pi<1, если Pi=0, то Fi=10000 Гц и Ti=1 мсек. Таким образом, для тех спутников, для которых Pi=0, получается Ki=2, что не удовлетворяет ни одному из условий поиска. Т.е. сигнал с нулевой вероятностью обнаружения заведомо не будет подлежать поиску.
Рассмотрим фиг.6, на которой проиллюстрированы значения весовых коэффициентов для первых девяти сигналов спутников. Например, для спутников с номерами 3 и 4 оказалось, что F3=F4=10000 Гц, Т3=Т4=1 мсек, Р3=0.03, P4=0.04. Тогда для них К3=2.006, K4=2.008, и они не удовлетворяют ни одному из условий поиска. Окна поиска для сигналов этих спутников слишком велики, а вероятность их обнаружения мала.
На первом этапе последовательно выполняют поиск сигналов спутников, весовые коэффициенты которых удовлетворяют условию первого режима поиска (фиг.2.3), при этом используют рассчитанные параметры поиска сигналов этих спутников, поиск каждого сигнала спутника выполняют один раз.
Например, сигнал спутника с наибольшим весовым коэффициентом имеет номер 5 (фиг.6). Предположим, что его не находят. Это, однако, не означает, что сигнал данного спутника отсутствует. Это может означать, что сигнал ослаблен, или спутник заслонен от пользователя каким-либо препятствием. Поэтому его весовой коэффициент уменьшают на единицу (уменьшают на единицу Ai) и вновь по формуле (*) рассчитывают Ki. Теперь весовой коэффициент этого сигнала удовлетворяет условию второго режима поиска (фиг.7), и его в дальнейшем попытаются обнаружить, используя большее время накопления, но уже на следующем этапе поиска.
Пусть сигнал спутника со вторым по величине весовым коэффициентом находят. Предположим, что его номер 1 (фиг.6 и 7). Принимают для него Pi=1, а также уменьшают Аi на единицу. Начинают обработку навигационного сообщения от него. Для необнаруженных спутников, у которых Pi≠1 и Pi≠0, пересчитывают Pi. В качестве Pi берется условная вероятность их наличия при условии, что обнаружены те спутники, для которых Pi=1, и не обнаружены те, для которых Pi=0. Используя новые значения Pi, рассчитываются новые Ki. Предположим, что после пересчета значений Pi оказалось, что Р3=0.13, в результате чего К3=2.026. Это значит, что теперь третий спутник удовлетворяет условию первого режима поиска (фиг.8). Однако при дальнейшем поиске Р3 вновь может измениться так, что К3 не будет удовлетворять ни одному из условий поиска.
Продолжают поиск, однако последовательность поиска оставшихся спутников в новом порядке осуществляют в порядке убывания пересчитанных Ki. В дальнейшем при обнаружении или необнаружении сигнала спутника поступают аналогичным образом.
Предположим, что на первом этапе обнаружено всего три спутника под номерами один, десять и двенадцать (последние два не отображены на чертежах), но не осталось больше спутников, удовлетворяющих условию поиска в первом режиме. Тогда переходят ко второму этапу, на котором используют второй режим поиска. Спутники также продолжают искать в порядке убывания их весовых коэффициентов. При попытке обнаружения сигнала, а также после обнаружения сигнала поступают аналогичным образом, что и на первом этапе.
Допустим, что на протяжении первого этапа величина K4 не удовлетворяла условию первого режима поиска и оставалась меньшей чем 2.01, но большей двух. Сигнал спутника под номером четыре не искали. Предположим, что в начале второго этапа среди сигналов спутников, удовлетворяющих условию второго режима поиска, самый большой коэффициент имеет сигнал спутника под номером пять. Пусть этот сигнал обнаруживают, и после этого обнаружения при пересчете величин Pi оказалось, что Р4=0.14. Так как сигнал спутника под номером 4 не пытались обнаружить на первом этапе поиска в первом режиме (фиг.9), то для него А4=2, тогда К4=2.028, и он удовлетворяет условию первого режима поиска. Однако на втором этапе используется второй режим поиска. Это означает, что сигнал этого спутника не будут пытаться обнаружить на втором этапе.
Приступают к третьему этапу поиска (фиг.2.4). Сигналы необнаруженных спутников удовлетворяют либо условию третьего режима поиска, либо не удовлетворяют ни одному из этих условий, кроме сигнала спутника под номером 4. Из-за изменения коэффициента сигнал спутника под номером 4 удовлетворяет условию первого режима поиска. Тогда на третьем этапе не будут использовать третий режим поиска, а вновь используют первый режим поиска для спутника под номером 4. Его начальный весовой коэффициент не удовлетворял ни одному из условий режимов поиска, но в процессе поиска был пересчитан. Допустим, что его не обнаруживают. Тогда весовой коэффициент для него уменьшают на единицу (путем уменьшения А4 на единицу). Таким образом, он будет удовлетворять условию второго режима поиска.
На четвертом этапе вновь будут искать сигнал спутника под номером 4, используя для этого второй режим поиска. Предположим, что его опять не обнаруживают.
Теперь не остается сигналов спутников, удовлетворяющих условию первого или второго режима поиска. Тогда на пятом этапе приступают к поиску сигналов спутников в третьем режиме.
Допустим необнаруженный сигнал спутника с наибольшим весовым коэффициентом под номером восемь не находят (фиг.10). Его весовой коэффициент не уменьшают на единицу, а меняют знак этого коэффициента (для него величину Mi принимают равной минус единице).
Пусть необнаруженный сигнал спутника со вторым по величине весовым коэффициентом находят. Принимают для него Pi=1, а также меняют знак этого коэффициента. Величины Pi пересчитывают, используя то же правило, что и на предыдущих этапах.
Предположим, что на пятом этапе обнаружено еще два сигнала спутников под номерами восемь и шесть. Таким образом, всего за пять этапов обнаружено шесть спутников. Например, в течение пятого этапа не появилось спутников, чьи весовые коэффициенты удовлетворяют условию второго или первого режима поиска, как это было со спутником под номером 4. Таким образом, к концу третьего этапа не остается спутников, удовлетворяющих какому-либо из условий поиска.
Тогда для всех необнаруженных сигналов спутников обновляют весовые коэффициенты - для них принимают, что Mi=1 (фиг.11). Приступают к шестому этапу поиска. Вновь пытаются обнаружить спутники в третьем режиме поиска. Допустим, что на шестом этапе обнаруживают еще два спутника. Поиск завершают.
Заявляемый способ несложен в реализации, его осуществляют посредством известных в данном уровне технике устройств - это:
спутники, с которых поступают данные на приемник спутниковой навигационной системы;
любые подвижные объекты (устройства), местоположение которых периодически необходимо определять;
подвижные объекты содержат приемник спутниковой навигационной системы, посредством которого принимают данные, поступающие со спутников, и обрабатывают их;
приемник спутниковой навигационной системы содержит процессор, посредством которого по заданному алгоритму и его программному обеспечению осуществляют заявляемый способ поиска сигналов спутников.
Таким образом, предложенная последовательность действий заявляемого способа поиска сигналов спутников по сравнению с известным уровнем техники позволяет существенно уменьшить время поиска, необходимого для обнаружения заданного количества сигналов спутников. Это преимущество достигается за счет того, что последовательный поиск сигналов спутников осуществляют в заданном порядке, а именно в первую очередь осуществляют поиск сигналов спутников, для которых примерно известны окна поиска по частоте и временному положению, во вторую очередь осуществляют поиск сигналов спутников, для которых известны только окна поиска по частоте. Поэтому сначала осуществляют поиск сигналов спутников, чей поиск наименее ресурсоемок, что значительно сокращает общее время обнаружения заданного числа сигналов спутников. При этом последовательный поиск позволяет существенно уменьшить использование ресурсов процессора приемника, а неиспользуемые ресурсы (возможности) приемника направить для выполнения других задач.
Кроме того, заявляемый способ поиска сигналов спутников предполагает использование Q режимов поиска сигналов спутников, при котором последовательный поиск сначала выполняют в наиболее быстром, но менее чувствительном режиме, что позволяет очень быстро обнаружить сильные сигналы спутников, а лишь затем осуществляют поиск в более чувствительных и более долгих по времени режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ СПУТНИКОВ В УСЛОВИЯХ ПОЛНОЙ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ | 2008 |
|
RU2411531C2 |
| СПОСОБ ПОИСКА СИГНАЛОВ СПУТНИКОВ В МНОГОКАНАЛЬНОМ ПРИЕМНИКЕ СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2318221C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ПО ПСЕВДОДАЛЬНОСТИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ (ГСП) | 2000 |
|
RU2253127C2 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИБРИДНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ (ВАРИАНТЫ) | 2008 |
|
RU2399065C2 |
| НАВИГАЦИОННАЯ СИСТЕМА И СПОСОБ РАЗРЕШЕНИЯ ЦЕЛОЧИСЛЕННЫХ НЕОДНОЗНАЧНОСТЕЙ С ИСПОЛЬЗОВАНИЕМ ОГРАНИЧЕНИЯ НЕОДНОЗНАЧНОСТИ ДВОЙНОЙ РАЗНОСТИ | 2011 |
|
RU2591953C2 |
| Способ расследования распределенных событий компьютерной безопасности | 2015 |
|
RU2610395C1 |
| СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ДАННЫХ ДЛЯ ПОМОЩИ В ОБНАРУЖЕНИИ СИГНАЛА | 2004 |
|
RU2365933C2 |
| СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ДАННЫХ ДЛЯ ПОМОЩИ В ОБНАРУЖЕНИИ СИГНАЛА | 2009 |
|
RU2488134C2 |
| РАСПРЕДЕЛИТЕЛЬНЫЕ КОДЫ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2005 |
|
RU2416101C2 |
Изобретение относится к способу поиска сигналов спутников. Техническим результатом является уменьшение времени поиска, необходимого для обнаружения заданного количества сигналов спутников, и уменьшение использования ресурсов процессора приемника. Технический результат достигается тем, что в первую очередь осуществляют поиск сигналов спутников, для которых примерно известны окна поиска по частоте и временному положению, во вторую очередь осуществляют поиск сигналов спутников, для которых известны только окна поиска по частоте. При этом последовательный поиск сначала выполняют в наиболее быстром, но менее чувствительном режиме, затем осуществляют поиск в более чувствительных и более долгих по времени режимах. 5 з.п. ф-лы, 11 ил.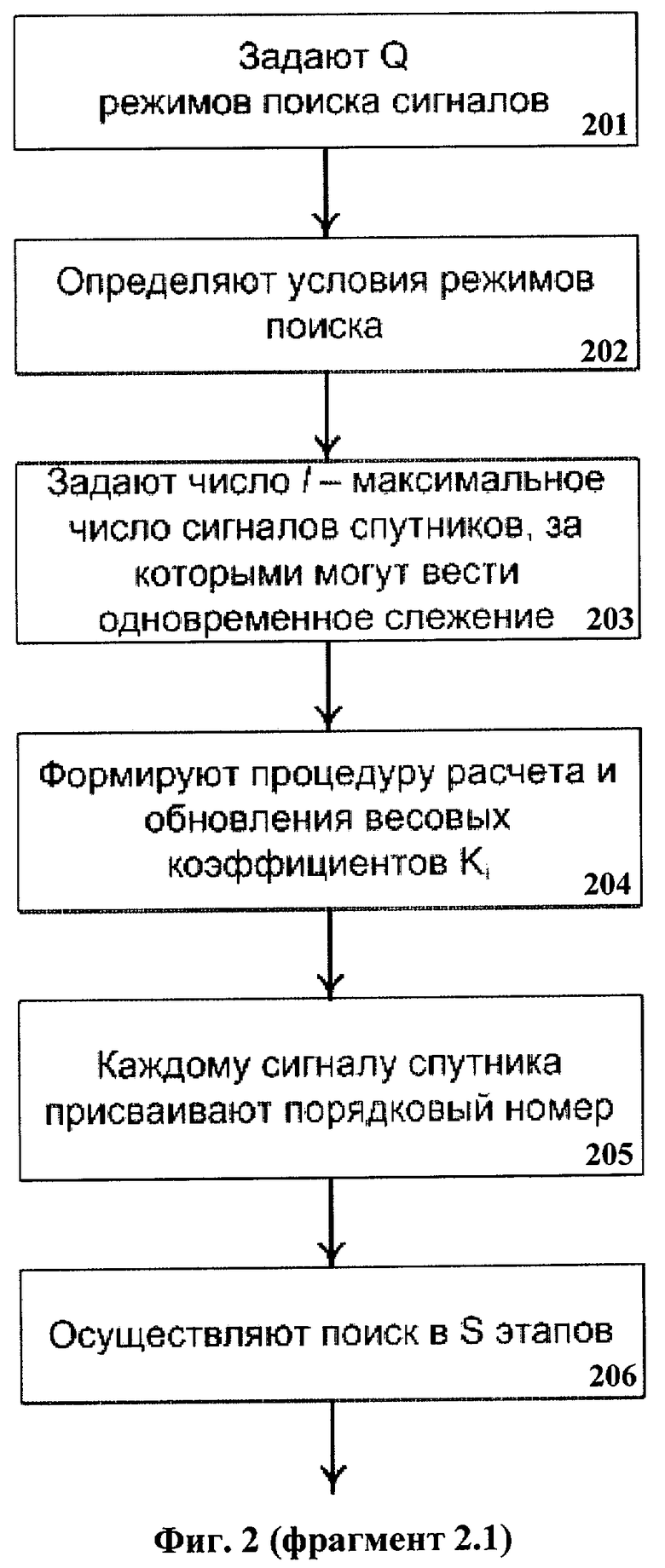
1. Способ поиска сигналов спутников, при котором на принимающей стороне пользователя предварительно задают Q режимов поиска сигналов спутников, где Q>1, причем каждый последующий режим поиска отличается от предыдущего большим временным интервалом наблюдения сигналов спутников и возможностью на каждом последующем режиме поиска обнаруживать сигналы спутников с меньшей мощностью, определяют условия, которым должны соответствовать весовые коэффициенты сигналов спутников, чтобы их поиск осуществлялся в заданном режиме, причем условия определяют таким образом, чтобы значение весового коэффициента могло удовлетворять только одному из этих условий, или не удовлетворять ни одному из них, задают максимальное число спутников l, за которыми принимающая сторона пользователя может выполнять одновременное слежение, где l≥3, формируют процедуру расчета весовых коэффициентов сигналов спутников и их обновления и запоминают ее, каждому сигналу спутника присваивают порядковый номер, при этом осуществляют поиск сигналов спутников в S этапов, где S≥1, для чего определяют предварительные оценки взаимного расположения и параметров движения спутников, используя информацию об их предыдущих значениях, или информацию, полученную посредством соединения с сервером, или предварительно записанную информацию о возможных значениях этих параметров, используя полученные предварительные оценки взаимного расположения и параметров движения спутников, рассчитывают параметры поиска этих сигналов, определяют начальные значения весовых коэффициентов сигналов спутников Ki по предварительно сформированной процедуре расчета весовых коэффициентов сигналов спутников, используя полученные предварительные оценки параметров поиска сигналов спутников, на первом этапе последовательно выполняют поиск сигналов спутников, весовые коэффициенты которых удовлетворяют условию первого режима поиска, при этом используют рассчитанные параметры поиска сигналов этих спутников, поиск каждого сигнала спутника выполняют один раз, причем поиск сигналов спутников осуществляют в порядке убывания значений весовых коэффициентов сигналов спутников, если значения весовых коэффициентов сигналов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания порядковых номеров сигналов спутников, после обнаружения сигнала спутника или попытки обнаружения его сигнала весовой коэффициент этого сигнала изменяют, используя заранее сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, таким образом, чтобы он удовлетворял условию следующего режима поиска, если сигнал спутника в результате поиска обнаружен, начинают обработку навигационного сигнала от данного спутника, и пересчитывают весовые коэффициенты для необнаруженных сигналов спутников, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, если обнаруженными оказываются менее l сигналов, то последовательно в порядке убывания соответствующих им измененных весовых коэффициентов продолжают поиск сигналов оставшихся спутников, весовые коэффициенты сигналов которых удовлетворяют условию первого режима поиска, и сигналы которых не обрабатывают в данный момент, если сигналы l спутников обнаружены на первом этапе поиска, то поиск прекращают, если число обнаруженных сигналов спутников на первом этапе меньше l, тогда переходят к следующему этапу поиска, для чего, используют режим поиска с наименьшим номером, условию которого удовлетворяют весовые коэффициенты сигналов необнаруженных спутников, порядок поиска необнаруженных сигналов спутников осуществляют в порядке убывания значений весовых коэффициентов сигналов спутников, если значения весовых коэффициентов сигналов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания порядковых номеров сигналов спутников, если на данном этапе используют режим поиска с номером, меньшим Q, то после обнаружения сигнала спутника или попытки обнаружения его сигнала весовой коэффициент этого сигнала изменяют, используя заранее сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, таким образом, чтобы весовой коэффициент этого сигнала удовлетворял условию следующего режима поиска, если на данном этапе используется режим поиска с номером, равным Q, то после обнаружения сигнала спутника или попытки обнаружения его сигнала весовой коэффициент этого сигнала изменяют, используя заранее сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, таким образом, чтобы весовой коэффициент этого сигнала не удовлетворял ни одному из условий заданных режимов поиска, если сигнал спутника в результате поиска обнаружен, начинают обработку навигационного сигнала от данного спутника и пересчитывают весовые коэффициенты для всех необнаруженных сигналов спутников, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, если сигналы l спутников обнаружены на текущем и предыдущих этапах поиска, то поиск прекращают, если число обнаруженных сигналов спутников на текущем и предыдущих этапах поиска меньше l, тогда переходят к следующему этапу поиска, для чего, используют режим поиска с наименьшим номером, условию которого удовлетворяют весовые коэффициенты сигналов необнаруженных спутников, если весовые коэффициенты сигналов всех необнаруженных спутников не удовлетворяют ни одному из условий режимов поиска, тогда, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников, их обновляют, поиск продолжают до тех пор, пока будут обнаружены l сигналов спутников или пока не останется сигналов спутников, чьи весовые коэффициенты удовлетворяют условиям режимов поиска после обновления, если обработка навигационного сигнала от обнаруженного спутника в силу каких-либо обстоятельств невозможна, то данный сигнал спутника считают необнаруженным, его обработку прекращают, и, используя сформированную процедуру расчета весовых коэффициентов сигналов спутников и их обновления, пересчитывают весовые коэффициенты для всех необнаруженных спутников, процедуру поиска продолжают.
2. Способ по п.1, отличающийся тем, что Q режимов поиска сигналов спутников характеризуют для каждого режима поиска заданным числом одинаковых по длительности интервалов когерентного накопления сигнала, полученные значения когерентных накоплений сигнала суммируют некогерентно, причем заданное число интервалов когерентного накопления сигнала возрастает на каждом последующем режиме поиска.
3. Способ по п.1, отличающийся тем, что условие, которому должен соответствовать весовой коэффициент Ki сигнала спутника, чтобы его поиск осуществлялся j-м режиме, определяют по формуле
Q-j+1>Ki≥Q-j+h,
где 1>h≥0,
3>Ki≥2+h - сигнал удовлетворяет условию первого режима поиска, если число режимов Q=3,
2>Ki≥l+h - сигнал удовлетворяет условию второго режима поиска, если число режимов Q=3,
1>Ki≥0+h - сигнал удовлетворяет условию третьего режима поиска, если число режимов Q=3,
где 1>h≥0,
иные значения Ki - сигнал не удовлетворяет ни одному из условий режимов поиска.
4. Способ по п.1, отличающийся тем, что процедуру расчета весовых коэффициентов Ki сигналов спутников и их обновления формируют как
Ki=Mi·(Ai+Pi·H+(1-H)·(1-Fi/FM)·(1-Ti/TM)),
где Mi=±1 - коэффициент, определяющий знак Ki,
Аi - целое число, заданное для данного спутника,
Pi - вероятность обнаружения i-го сигнала спутника, 1>=Pi>=0,
1>H>h, при этом Н заданное значение и равно constant,
Fi>0 - значение окна поиска по частоте для i-го сигнала спутника - диапазон изменения возможного значения частоты принимаемого сигнала,
FM - максимальное значение окна поиска по частоте, определяемое максимальной скоростью движения спутника относительно пользователя и техническими особенностями приемного устройства пользователя, при этом FM - заданное значение и равно constant,
Тi>0 - значение окна поиска по временной задержке для i-го сигнала спутника - диапазон изменения возможного значения временной задержки сигнала,
ТM - максимальное значение окна поиска по временной задержке, при этом ТM заданное значение и равно constant,
причем Тi<ТМ, Fi<FM,
при этом в начале поиска в качестве значений А для всех сигналов спутников берут целое число, равное числу режимов поиска Q минус единица, в качестве М для всех сигналов спутников берут единицу, в качестве значений Рi, используют предварительно вычисленные значения вероятностей обнаружения, Fi и Тi - соответственно рассчитанные значения окон поиска по частоте и временной задержке для i-го сигнала спутника, если Рi>0, а если Рi=0, то в качестве значений Fi и Ti используют соответственно заданные значения FM и ТM, равные constant, после обнаружения сигнала спутника или попытки его обнаружения значения Ai и Мi изменяют таким образом, что, если Аi>0, то значение Ai для данного сигнала спутника уменьшают на единицу, а значение Мi не изменяют, если Ai=0, то значение Мi для данного сигнала спутника берут равным минус единице, а значение Аi не изменяют, при обнаружении сигнала спутника для всех необнаруженных сигналов спутников пересчитывают вероятности Pi обнаружения сигналов спутников, кроме тех, для которых значения Рi=0 или Рi=1, если весовые коэффициенты сигналов всех необнаруженных спутников не удовлетворяют ни одному из условий режимов поиска, тогда значение Mi для каждого из данных сигналов спутников берут равным плюс единице, если обработка навигационного сигнала от обнаруженного спутника невозможна, то пересчитывают вероятности Рi обнаружения сигналов спутников.
5. Способ по п.1, отличающийся тем, что в качестве предварительных оценок взаимного расположения и параметров движения спутников используют диапазоны возможных значений углов возвышения спутников относительно предполагаемого местонахождения пользователя, возможных значений радиальных скоростей спутников относительно пользователя, возможных расстояний от спутников до предполагаемого местонахождения пользователя и предварительно вычисленные значения вероятностей обнаружения каждого сигнала спутника.
6. Способ по п.1, отличающийся тем, что в качестве параметров поиска для каждого сигнала спутника используют рассчитанные значения окон поиска по частоте и временной задержке для данного сигнала спутника.
| US 6873910 А1, 22.04.2004 | |||
| RU 2006130799 А, 20.03.2008 | |||
| US 2008252511 А1, 16.10.2008 | |||
| WO 2004021036 A1, 11.03.2004 | |||
| RU 2006110909 C1, 11.10.2007. |

