Группа изобретений относится к области радиотехники, в частности к вариантам осуществления способа определения местоположения подвижного объекта посредством гибридной навигационной системы.
В ряде задач необходима точная информация о местоположении подвижного объекта. Достоинством спутниковой навигационной системы является возможность оценки местоположения объекта или пользователя в любой точке земного шара. При этом необходимым условием возможности получения оценки координат является прием минимум четырех сигналов спутников в режиме 3d локации. Это условие достаточно хорошо выполняется при позиционировании на открытой местности. В условиях города возможны ситуации, когда сигналы спутников экранированы рельефом или строениями. Примером таких условий являются туннели, крытые автостоянки. В таких условиях обычные спутниковые навигационные приемники зачастую не способны принять достаточное для позиционирования число навигационных сигналов.
Определять местоположение подвижного объекта возможно, используя инерционную навигационную систему. Зная начальное положение подвижного объекта, скорость движения и направление, возможно определить местоположение этого объекта в последующие промежутки времени. Недостатком данного способа является то, что с течением времени накапливается ошибка в определении местоположения подвижного объекта.
Одним из наиболее перспективных способов повышения точности определения местоположения (локации) в сложных условиях является применение гибридных систем навигации. Для реализации этой идеи спутниковый навигационный приемник дополняют инерционным измерительным блоком, который позволяет получать оценку местоположения на основе инерционных измерений.
Одним из таких известных способов является Loose integration алгоритм, описанный в патенте US 7193559 Inertial GPS Navigation System with Modified Kalman Filter [1]. В данном способе измерения со спутниковой навигационной системы используют для оценки ошибки инерционной навигационной системы и ее корректировки. Недостатком данного алгоритма является невозможность вычисления корректировок в случае, когда число видимых спутников менее четырех.
Известно использование Tight integration алгоритма (патент US 6900760 Adaptive GPS and INS integration system) [2] для решения данной технической задачи. В отличие от Loose integration алгоритма Tight integration обеспечивает возможность расчета корректировок даже при числе видимых спутников менее четырех. Однако недостатком данного алгоритма является повышенное усложнение вычислений, так как необходимо находить (вычислять) обратную матрицу к матрице большого размера, что значительно увеличивает число операций.
Известно использование более вычислительно-емких алгоритмов, например ultra-tight Integration (патент US 6516021 Global positioning systems and inertial measuring unit ultratight coupling method) [3]. Ultra-tight Integration представляет собой интеграцию систем GPS и IMU на низком уровне. Недостатком ultra-tight Integration является сложная практическая реализация в подвижных устройствах из-за большой вычислительной сложности.
Известны также алгоритмы, использующие большее количество датчиков, например, возможно использование вместо одной антенны GPS - две разнесенные антенны, либо используют магнитный сенсор, позволяющий корректировать направление движения объекта, ориентируясь по магнитному полю Земли. К таким алгоритмам можно отнести, например, техническое решение, описанное в патенте US 6480152 Integrated GPS/IMU Method and Microsystem thereof [4], в котором в качестве дополнительного датчика используют Magnetic Data Microprocessor. Недостатком таких способов является:
1. Увеличение сложности при реализации;
2. Увеличение размеров, вызванное наличием дополнительных датчиков, использование которых нежелательно для применения в мобильных устройствах.
Наиболее близким техническим решением к заявляемым вариантам изобретения является способ, описанный в [2]. Согласно способу-прототипу объединенная система из GPS и INS представляет собой: Inertial Measurement Unit, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по тем же ортогональным осям; GPS chipset для приема RF signal, который позволяет определять следующие данные: позицию спутников, скорость спутников, псевдорасстояния до объекта наблюдения и pseudo Doppler.
Способ-прототип заключается в следующем:
считают, что начальное местоположение подвижного объекта известно, значение скорости известно, угол между body-frame и локальной системой координат - attitude error - не известен;
принимают данные со спутников: координаты спутников, псевдорасстояния, pseudo Doppler, скорости спутников;
используя полученные данные со спутников, формируют две матрицы поворота: одна из которых - матрица поворота для координат спутников, другая - матрица поворота для скоростей спутников;
используя сформированные матрицы поворота, осуществляют преобразование координат спутников и их скоростей из системы ECEF в локальную систему, связанную с рассматриваемым подвижным объектом;
принимают данные с подвижного объекта: угловые скорости и линейные ускорения подвижного объекта;
используя принятые данные об угловых скоростях подвижного объекта, формируют матрицу поворота R;
используя сформированную матрицу поворота R, преобразуют полученные данные о линейных ускорениях подвижного объекта из body-frame (система координат, связанная с подвижным объектом) в локальную систему координат;
формируют dynamic matrix F (динамическая матрица F), диагональную матрицу дисперсий, характеризующую инерциальный измерительный блок - Q, корреляционную матрицу ошибок измерений W, характеризующую спутниковую навигационную систему;
используя преобразованные линейные ускорения, а также значения местоположения, скорости, сформированные матрицы поворота, рассчитанные на предыдущем шаге, вычисляют текущее местоположение подвижного объекта и его скорость движения;
преобразованные данные со спутников, dynamic matrix F, диагональная матрица дисперсий, характеризующая инерциальный измерительный блок - Q, корреляционная матрица ошибок измерения W, характеризующая спутниковую навигационную систему, сформированные матрицы поворота, рассчитанные на предыдущем шаге, поступают на подвижный объект;
на подвижном объекте посредством калмановского фильтра вычисляют прогнозируемые (predicted) значения для вектора состояния dx и его корреляционной матрицы ошибок Р;
вычисляют матрицу коэффициентов усиления калмановского фильтра;
вычисляют вектор состояния и его корреляционную матрицу ошибок P.
Частота обновления калмановского фильтра зависит обратно пропорционально tracking loop bandwidth.
Матрица коэффициентов усиления калмановского фильтра умножается на весовые коэффициенты, равные отношению времени между последующими измерениями к времени между последующими некоррелированными измерениями.
Корреляционную матрицу ошибок измерения W делят на адаптивную матрицу А. Или матрицу шума измерений, W, умножают на весовые коэффициенты, равные отношению времени между последовательными некоррелированными измерениями, к времени между последующими измерениями.
Недостатком данного способа является сложность в реализации способа-прототипа, которая возникает за счет нахождения обратной матрицы при вычислении матрицы коэффициентов усиления калмановского фильтра, а при фиксированной точности вычислений это приводит к неустойчивости алгоритма, что в конечном итоге приводит к невозможности получить точную информацию о местоположении подвижного объекта.
Задача, которую решает заявляемое изобретение (варианты) - это повышение точности определения местоположения подвижного объекта, находящегося в сложных условиях, посредством гибридной навигационной системы.
Поставленная задача решается по первому варианту осуществления заявляемым способом определения местоположения подвижного объекта посредством гибридной навигационной системы, объединяющей приемник спутниковой навигационной системы для приема навигационного сигнала, который позволяет определять позицию спутников, скорость спутников, псевдорасстояния до объекта наблюдения и оценку допплеровского смещения несущей частоты навигационного сигнала, измерительное устройство инерционной навигационной системы и вычислительное устройство, расположенные на подвижном объекте, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по ортогональным осям;
заключающимся в том, что
считают, что начальное местоположение подвижного объекта и начальное значение вектора его скорости известно,
принимают данные со спутников, которые находятся в зоне радиовидимости, причем в качестве данных, принимаемых со спутников, используют, например, координаты и скорости спутников, псевдорасстояния и оценки допплеровского смещения несущей частоты навигационного сигнала,
используя полученные данные со спутников, формируют две матрицы поворота, одна из которых - матрица поворота для координат спутников, другая - матрица поворота для скоростей спутников;
используя сформированные матрицы поворота, осуществляют преобразование координат спутников и их скоростей из геоцентрической фиксированной системы координат в локальную систему координат;
принимают данные с измерительного устройства инерционной навигационной системы подвижного объекта - угловые скорости и линейные ускорения подвижного объекта;
используя принятые данные об угловых скоростях подвижного объекта, формируют матрицу поворота R из системы координат, связанной с подвижным объектом, в локальную систему координат;
используя сформированную матрицу поворота R, преобразуют полученные данные о линейных ускорениях подвижного объекта;
формируют матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые измерительным устройством инерционной навигационной системы, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы;
используя полученные преобразованные данные о линейных ускорениях подвижного объекта, а также значения местоположения, скорости, сформированные матрицы поворота, вычисляют местоположение подвижного объекта и его скорость движения;
преобразованные данные со спутников, матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, корреляционную матрицу ошибок измерения W, вычисленные местоположение подвижного объекта и его скорость движения, используют для формирования матрицы Н, описывающей линейную связь всех измерений с компонентами вектора состояния, и для вычисления прогнозируемых значений вектора состояния dx и корреляционную матрицу ошибок оценки компонентов вектора состояния Р;
используя вычисленные значения, вычисляют вектор состояния и его корреляционную матрицу ошибок,
по результатам вычисленного вектора состояния определяют текущее местоположение объекта,
отличающимся согласно изобретению тем, что
сформированные корреляционную матрицу ошибок инерционных измерений Q, корреляционную матрицу ошибок измерений W умножают на соответствующие им весовые коэффициенты,
при вычислении прогнозируемых значений вектора состояния dx и корреляционной матрицы его ошибок выполняют обращение матрицы по приближенной формуле вычисления:
 ,
,
при этом весовые коэффициенты выбирают, таким образом, чтобы выполнялось условие
 ,
,
элементы корреляционной матрицы ошибок вектора состояния сравнивают с заданной величиной порога,
если хотя бы один из элементов превышает заданную величину порога, то для вычисления вектора состояния текущего этапа используют вычисленные значения матрицы ошибок вектора состояния предыдущего этапа,
в случае превышения порога хотя бы одним из элементов, возвращается матрица дисперсии, вычисленная на предыдущем шаге.
Поставленная задача решается по второму варианту осуществления заявляемым способом определения местоположения подвижного объекта посредством гибридной навигационной системы, объединяющей приемник спутниковой навигационной системы для приема навигационного сигнала, который позволяет определять позицию спутников, скорость спутников, псевдорасстояния до объекта наблюдения и оценку допплеровского смещения несущей частоты навигационного сигнала, измерительное устройство инерционной навигационной системы и вычислительное устройство, расположенные на подвижном объекте, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по ортогональным осям;
заключающимся в том, что
считают, что начальное местоположение подвижного объекта и начальное значение вектора его скорости известно, а угол между системой координат, связанной с подвижным объектом, и локальной системой координат не известен;
принимают данные со спутников, которые находятся в зоне радиовидимости, например координаты спутников, скорости спутников, псевдорасстояния, оценки допплеровского смещения несущей частоты навигационного сигнала;
используя полученные данные со спутников, формируют две матрицы поворота, одна из которых - матрица поворота для координат спутников, другая - матрица поворота для скоростей спутников;
используя сформированные матрицы поворота, осуществляют преобразование координат спутников и их скоростей из геоцентрической фиксированной системы координат в локальную систему координат;
принимают данные с измерительного блока инерционной навигационной системы подвижного объекта - угловые скорости и линейные ускорения подвижного объекта;
используя принятые данные об угловых скоростях подвижного объекта, формируют матрицу поворота R из системы координат, связанной с подвижным объектом, в локальную систему координат;
используя сформированную матрицу поворота R, преобразуют полученные данные о линейных ускорениях подвижного объекта;
формируют матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые измерительным устройством инерционной навигационной системы, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы;
используя полученные преобразованные данные о линейных ускорениях подвижного объекта, а также значения местоположения, скорости, сформированные матрицы поворота, вычисляют местоположение подвижного объекта и его скорость движения;
преобразованные данные со спутников, матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, корреляционную матрицу ошибок измерения W, вычисленные местоположение подвижного объекта и его скорость движения, используют для формирования матрицы Н, описывающей линейную связь всех измерений с компонентами вектора состояния, и для вычисления прогнозируемых значений вектора состояния dx и корреляционную матрицу ошибок оценки компонентов вектора состояния Р;
используя вычисленные значения, вычисляют вектор состояния и его корреляционную матрицу ошибок,
по результатам вычисленного вектора состояния определяют текущее местоположение объекта,
отличающимся согласно изобретению тем, что
задают временной интервал τ, на каждом временном интервале τ:
из элементов вектора состояния формируют вектор, элементы которого содержат значения ошибки в определении угла между системой координат, связанной с подвижным объектом и локальной системой координат,
элементам вектора состояния, соответствующим ошибке в определении угла между системой координат, связанной с подвижным объектом, и локальной системой координат, присваивают нулевые значения,
используя сформированный вектор, вычисляют корректирующую матрицу поворота, используя которую выполняют коррекцию матрицы поворота R путем умножения ее на корректирующую матрицу, получая скорректированную матрицу поворота R за данный временной интервал τ,
используют скорректированную матрицу поворота R для преобразования полученных данных о линейных ускорениях подвижного объекта и формирования матрицы перехода для вектора состояния.
Таким образом, в результате предложенной новой последовательности действий предлагаемого изобретения по первому варианту осуществления существенно снижается объем вычислительных операций по сравнению с вычислительными операциями в способе-прототипе, которые выполняются посредством калмановского фильтра. Это преимущество изобретения позволяет не только существенно упростить и снизить габариты (размеры) вычислительного устройства, используемого на подвижном объекте, но и обеспечивает высокую точность определения местоположения подвижного объекта.
Снижение вычислительных операций при высокой точности определения местоположения подвижного объекта позволяет широко использовать изобретение в различных устройствах подвижных объектов, например мобильных устройствах пользователей, имеющих маленькие размеры, а также использовать изобретение в сложных условиях, например, когда сигналы спутников экранированы рельефом или строениями (туннели, крытые автостоянки и другие застройки, как городские, так и за пределами города).
В результате предложенной новой последовательности действий предлагаемого изобретения по второму варианту осуществления обеспечивается высокая точность определения местоположения подвижного объекта и устойчивость процедуры итеративной оценки координат подвижного объекта. Наличие этих признаков также позволяет широко использовать изобретение в сложных условиях, например, когда сигналы спутников экранированы рельефом или строениями. Это является очень важным преимуществом предлагаемого изобретения, как по первому, так и второму вариантам осуществления, поскольку многие технические решения, в том числе, описанные выше в разделе «описание уровня техники», практически не работают в сложных условиях или работают неэффективно.
Заявляемые изобретения (варианты способа) созданы в едином изобретательском замысле и направлены на решение одной технической задачи - это повышение точности определения местоположения подвижного объекта, находящегося в сложных условиях, посредством гибридной навигационной системы. Поэтому предлагаемые варианты осуществления заявляемого способа позволяют использовать изобретение по первому варианту и/или по второму варианту, что дает широкую возможность разработчику гибридной навигационной системы построить систему таким образом, чтобы получить максимальный технический эффект при использовании заявляемого изобретения.
Далее описание изобретения поясняется примерами выполнения и чертежами.
Фиг.1 иллюстрирует общий вид определения местоположения подвижного объекта посредством гибридной навигационной системы.
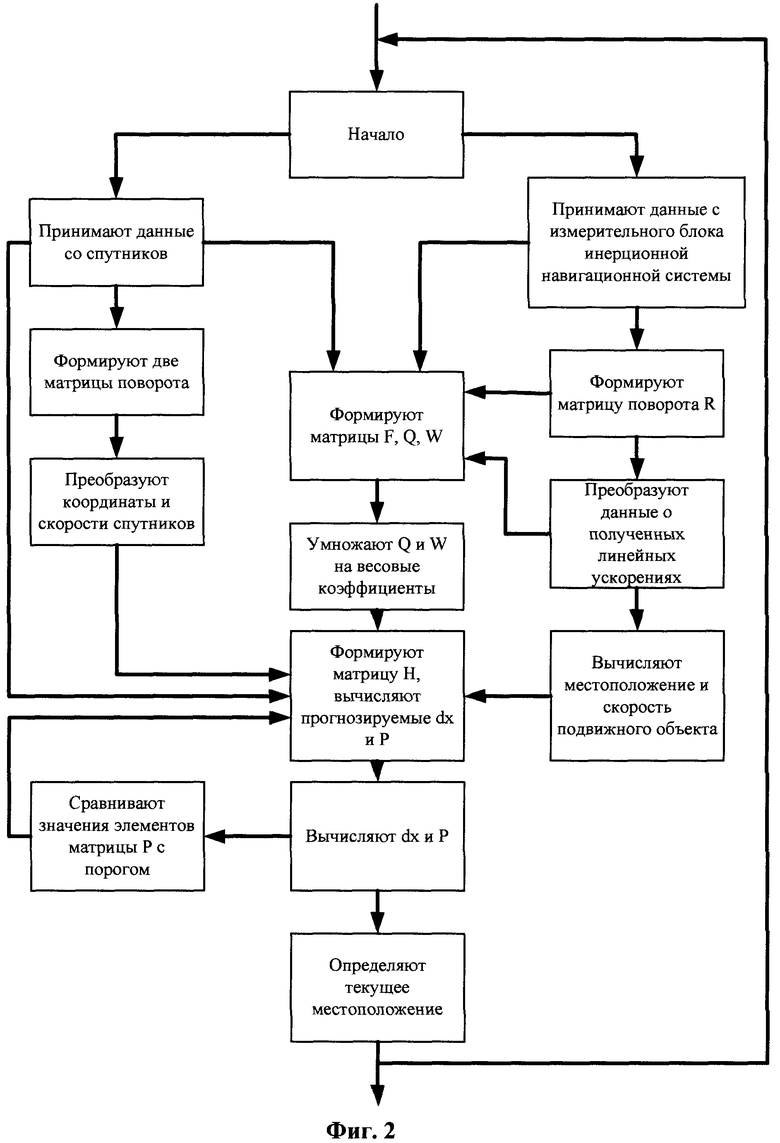
На фиг.2 выполнена структурная схема алгоритма согласно заявляемому изобретению по первому варианту осуществления.
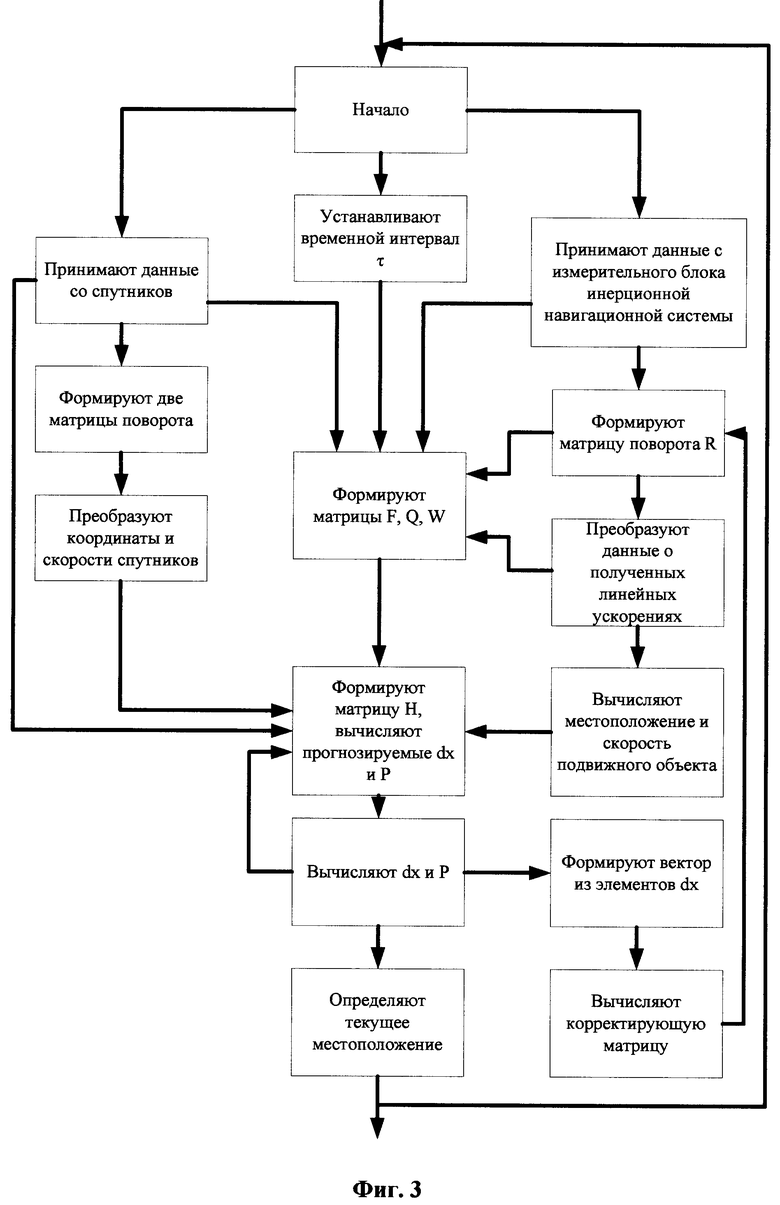
На фиг.3 выполнена структурная схема алгоритма согласно заявляемому изобретению по второму варианту осуществления.
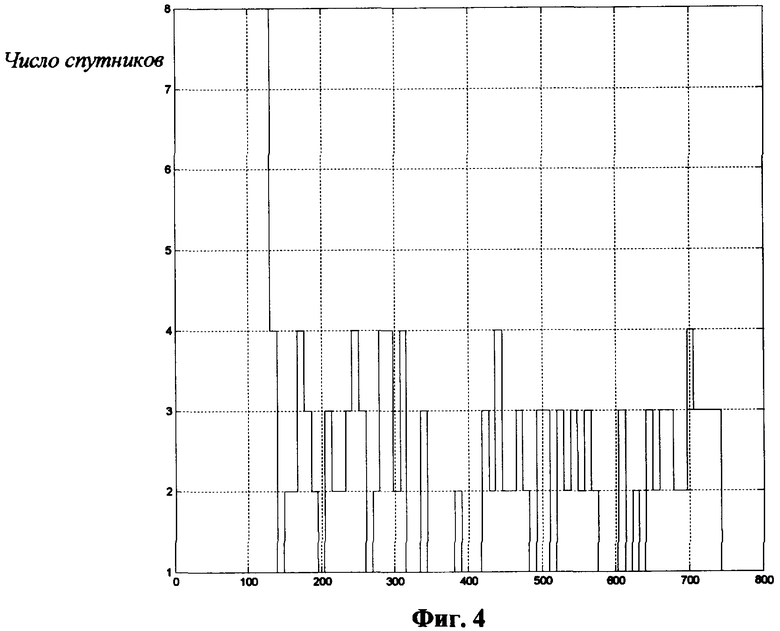
На фиг.4 приведены условия, при которых выполнялось компьютерное моделирование, показана зависимость числа спутников от прошедшего времени с начала движения.
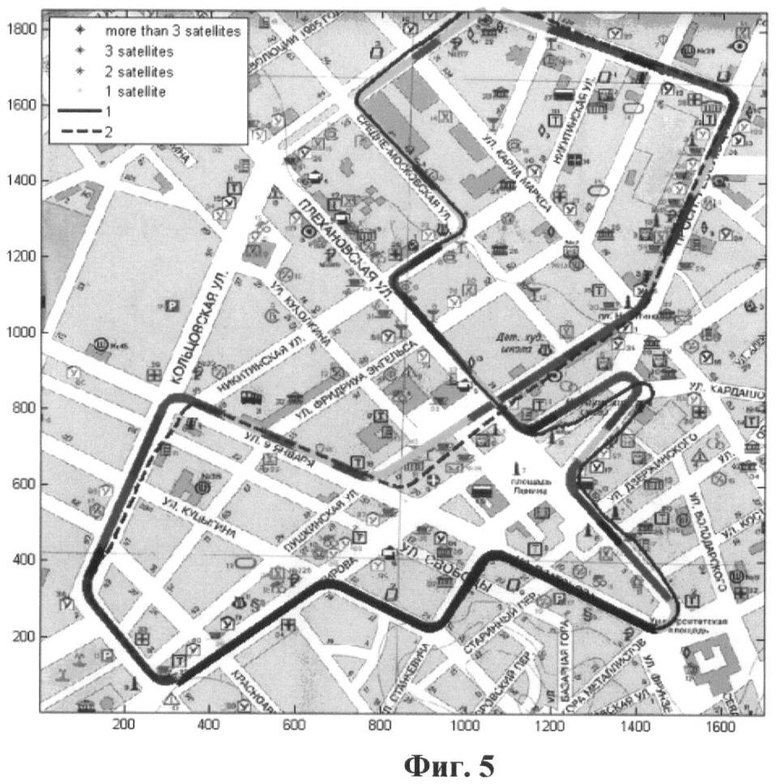
На фиг.5 показана траектория движения:
1 - траектория движения подвижного объекта, рассчитанная по известному алгоритму S.Godha, "Performance evaluation of low cost MEMS-based 1MU integrated with GPS for land vehicle navigation application," M. Sc. thesis, UCGE Report #20239, Department of Geomatics Engineering, University of Calgary, Calgary, Canada, 2006 [5].
2 - траектория движения подвижного объекта, рассчитанная по алгоритму согласно заявляемому изобретению по первому варианту осуществления.
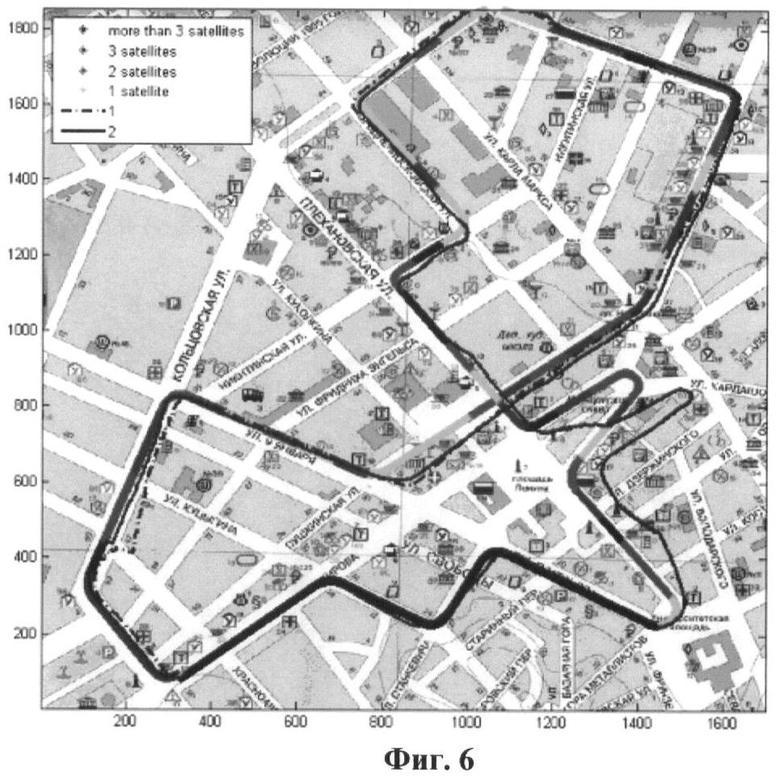
На фиг.6 показана траектория движения:
1 - траектория движения подвижного объекта, рассчитанная по известному алгоритму [5],
2 - траектория движения подвижного объекта, рассчитанная по алгоритму согласно заявляемому изобретению по второму варианту осуществления.
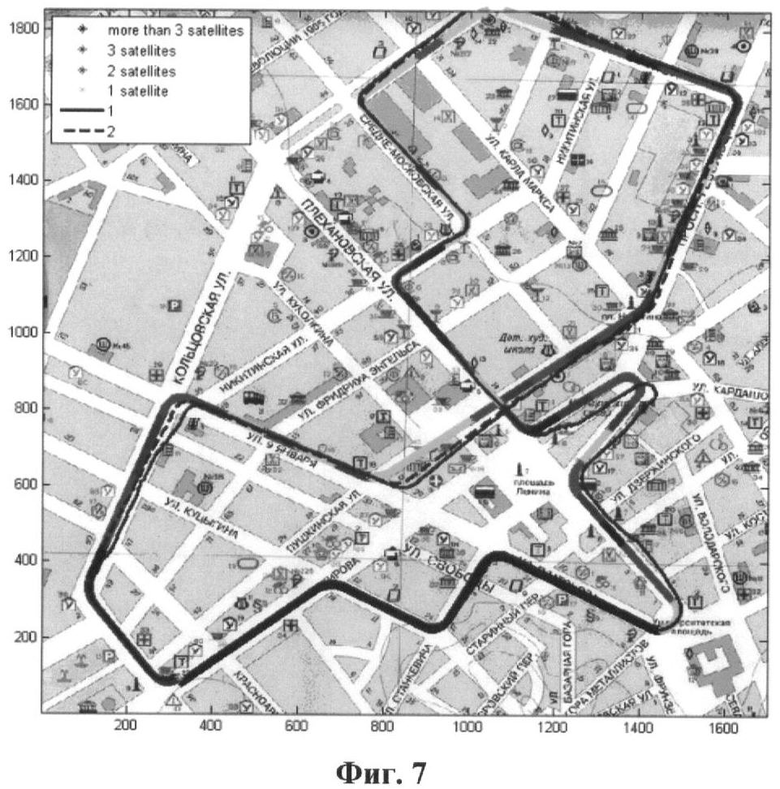
На фиг.7 показана траектория движения:
1 - траектория движения подвижного объекта, рассчитанная по алгоритму согласно заявляемому изобретению по первому варианту осуществления.
2 - траектория движения подвижного объекта, рассчитанная по алгоритмам согласно заявляемому изобретению для случая, когда одновременно используют изобретение по первому и второму вариантам осуществления.
Осуществляют заявляемое изобретение по первому и второму вариантам следующим образом (см. фиг.1-3).
Фиг.1 иллюстрирует общий вид осуществления заявляемого изобретения, на ней показано:
11-1N - спутники,
2 - подвижный объект,
3 - приемник спутниковой навигационной системы,
4 - измерительное устройство инерционной навигационной системы,
5 - вычислительное устройство.
Далее подробно рассмотрим реализацию заявляемого способа по первому варианту осуществления (см. фиг.1-2).
Заявляемый способ определения местоположения подвижного объекта посредством гибридной навигационной системы осуществляют в системе, объединяющей приемник спутниковой навигационной системы 3 для приема навигационного сигнала, который позволяет определять позицию спутников 11-1N, скорость спутников 11-1N, псевдорасстояния до объекта наблюдения и оценку допплеровского смещения несущей частоты навигационного сигнала, измерительное устройство инерционной навигационной системы 4 и вычислительное устройство 5, расположенные на подвижном объекте 2, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по ортогональным осям.
Считают, что начальное местоположение подвижного объекта 2 и начальное значение вектора его скорости известно. Принимают данные со спутников 11-1N, которые находятся в зоне радиовидимости: координаты и скорости спутников 11-1N, псевдорасстояния, оценки допплеровского смещения несущей частоты навигационного сигнала.
Используя полученные данные со спутников 11-1N (фиг.2) формируют две матрицы поворота: одна из которых - матрица поворота для координат спутников, другая - матрица поворота для скоростей спутников.
Используя сформированные матрицы поворота, осуществляют преобразование координат спутников 11-1N и их скоростей из геоцентрической фиксированной системы координат (European Organization for the Safety of Air Navigation, Institute of Geodesy and Navigation (IfEN), ((Reference WGS 84 implementation manual» Version 2.4, February 12, 1998, стр. 68 [6]) в локальную систему координат. В качестве локальной системы координат можно использовать, например, Gauss-Kruger projection (см. [6], стр 100).
Принимают данные с измерительного устройства инерционной навигационной системы 4 подвижного объекта 2 - угловые скорости ωk=(ωх, ωy, ωz) и линейные ускорения ƒk=(ƒx, ƒy, ƒz) подвижного объекта.
2. Используя принятые данные об угловых скоростях подвижного объекта 2, формируют матрицу поворота R из системы координат, связанной с подвижным объектом 2, в локальную систему координат.

ΔT - прошедшее время с момента предыдущего принятия данных с измерительного устройства инерционной навигационной системы.
Используя сформированную матрицу поворота R, преобразуют полученные данные о линейных ускорениях подвижного объекта 2.
ƒk=R·ƒk.
Формируют матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые инерциальным измерительным устройством, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы 3 (например, как описано в [5]). Сформированные корреляционную матрицу ошибок инерционных измерений Q, корреляционную матрицу ошибок измерений W умножают на соответствующие им весовые коэффициенты.
Используя полученные преобразованные данные о линейных ускорениях подвижного объекта 2, а также значения местоположения, скорости, сформированные матрицы поворота, вычисляют местоположение подвижного объекта 2 и его скорость движения (см. [5]).
Преобразованные данные со спутников 11-1N, матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые измерительным устройством инерционной навигационной системы 4, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы 3, вычисленные местоположение подвижного объекта 2 и его скорость движения, используют для формирования матрицы Н, описывающей линейную связь всех измерений с компонентами вектора состояния, и для вычисления прогнозируемых значений вектора состояния dx и корреляционную матрицу ошибок оценки компонентов вектора состояния Р. При этом матрицу Н формируют, например, следующим образом:
 ,
,
где

N - число спутников, находящихся в зоне радиовидимости, r - псевдорасстояния,  - оценка допплеровского смещения несущей частоты навигационного сигнала, ν - скорости спутников.
- оценка допплеровского смещения несущей частоты навигационного сигнала, ν - скорости спутников.
Вычисляют прогнозируемую корреляционную матрицу ошибок оценки компонентов вектора состояния Р:

Вычисляют прогнозируемое значение вектора состояния dx:

Используя вычисленные значения, вычисляют вектор состояния и его корреляционную матрицу ошибок.
Вычисляют

Вычисляют вектор состояния

Вычисляют корреляционную матрицу ошибок
 ,
,
где
где ′~′ обозначает прогнозируемые измеренные величины, рассчитанные на основе оцененных позиции и скорости подвижного объекта, а ′Δ′ обозначает разность соответствующих наблюдаемых величин.
При вычислении прогнозируемых значений вектора состояния dx и корреляционной матрицы его ошибок выполняют обращение матрицы по приближенной формуле вычисления:
,
при этом весовые коэффициенты выбирают, таким образом, чтобы выполнялось условие
.
Используя вычисленные значения, вычисляют вектор состояния и его корреляционную матрицу ошибок. Элементы корреляционной матрицы ошибок вектора состояния сравнивают с заданной величиной порога, если хотя бы один из элементов превышает заданную величину порога, то для вычисления вектора состояния текущего этапа используют вычисленные значения матрицы ошибок вектора состояния предыдущего этапа. В случае превышения порога хотя бы одним из элементов, возвращается матрица дисперсии, вычисленная на предыдущем шаге.
По результатам вычисленного вектора состояния определяют текущее местоположение объекта.
Далее подробно рассмотрим реализацию заявляемого способа по второму варианту осуществления (см. фиг.1, 3).
Заявляемый способ определения местоположения подвижного объекта посредством гибридной навигационной системы по второму варианту осуществляют в системе, объединяющей приемник спутниковой навигационной системы 3 для приема навигационного сигнала, который позволяет определять позицию спутников 11-1N, где N≥1, скорость спутников 11-1N, псевдорасстояния до подвижного объекта наблюдения 2 и оценку допплеровского смещения несущей частоты навигационного сигнала, измерительное устройство инерционной навигационной системы 4 и вычислительное устройство 5, расположенные на подвижном объекте 2, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по ортогональным осям.
Считают, что начальное местоположение подвижного объекта 2 и начальное значение вектора его скорости известно, а угол между системой координат, связанной с подвижным объектом 2 и локальной системой координат не известен.
Данные со спутников 11-1N, которые находятся в зоне радиовидимости, например, координаты и скорости спутников 11-1N, псевдорасстояния, оценки допплеровского смещения несущей частоты навигационного сигнала, поступают в приемник спутниковой навигационной системы 3. С приемника спутниковой навигационной системы 3 и измерительного устройства инерционной навигационной системы 4 поступают на вычислительное устройство 5.
В вычислительном устройстве 5 задают временной интервал τ и на каждом временном интервале τ принимают данные со спутников 11-1N, находящихся в зоне радиовидимости. Используя полученные данные со спутников 11-1N, формируют две матрицы поворота, одна из которых - матрица поворота для координат спутников 11-1N, другая - матрица поворота для скоростей спутников 11-1N.
Используя сформированные матрицы поворота, осуществляют преобразование координат спутников 11-1N и их скоростей из геоцентрической фиксированной системы координат в локальную систему координат.
Принимают данные с измерительного устройства инерционной навигационной системы 4 подвижного объекта 2 угловые скорости ωk=(ωx, ωy, ωz) и линейные ускорения ƒk=(ƒx, ƒy, ƒz) подвижного объекта.
2. Используя принятые данные о угловых скоростях подвижного объекта 2, формируют матрицу поворота R из системы координат, связанной с подвижным объектом 2, в локальную систему координат.

ΔT - прошедшее с момента предыдущего принятия данных с измерительного блока инерционной навигационной системы время.
Используя сформированную матрицу поворота R, преобразуют полученные данные о линейных ускорениях подвижного объекта 2.
ƒk=ƒk·Rk
Формируют матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые инерциальным измерительным устройством, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы 3 (например, см. [5]).
Используя полученные преобразованные данные о линейных ускорениях подвижного объекта 2, а также значения местоположения, скорости, сформированные матрицы поворота, вычисляют местоположение подвижного объекта 2 и его скорость движения (см. [5]).
Преобразованные данные со спутников 11-1N, матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые измерительным устройством инерционной навигационной системы 4, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы 3, вычисленные местоположение подвижного объекта 2 и его скорость движения, используют для формирования матрицы Н, описывающей линейную связь всех измерений с компонентами вектора состояния, и для вычисления прогнозируемых значений вектора состояния dx и корреляционную матрицу ошибок оценки компонентов вектора состояния Р. При этом матрицу Н формируют, например, следующим образом:
 ,
,
где
N - число спутников, находящихся в зоне радиовидимости,
r - псевдорасстояния,
 - оценка допплеровского смещения несущей частоты навигационного сигнала.
- оценка допплеровского смещения несущей частоты навигационного сигнала.
Вычисляют прогнозируемую корреляционную матрицу ошибок оценки компонентов вектора состояния Р:

Вычисляют прогнозируемое значение вектора состояния dx:
Используя вычисленные значения, вычисляют вектор состояния и его корреляционную матрицу ошибок.
Вычисляют

Вычисляют вектор состояния

Вычисляют корреляционную матрицу ошибок
 ,
,
где

где ′~′ обозначает прогнозируемые измеренные величины,
рассчитанные на основе оцененных позиции и скорости подвижного объекта, а ′Δ′ обозначает разность соответствующих наблюдаемых величин.
Из элементов вектора состояния формируют вектор, элементы которого содержат значения ошибки в определении угла между системой координат, связанной с подвижным объектом 2 и локальной системой координат. Элементам вектора состояния, соответствующим ошибке в определении угла между системой координат, связанной с подвижным объектом 2 и локальной системой координат, присваивают нулевые значения.
Используя сформированный вектор, вычисляют корректирующую матрицу поворота, используя которую выполняют коррекцию матрицы поворота R путем умножения ее на корректирующую матрицу, получая скорректированную матрицу поворота R за данный временной интервал τ.
Используют скорректированную матрицу поворота R для преобразования полученных данных о линейных ускорениях подвижного объекта 2 и формирования матрицы перехода для вектора состояния. По результатам вычисленного вектора состояния определяют текущее местоположение подвижного объекта 2.
Заявляемый способ (варианты) осуществляют посредством известных в данном уровне технике устройств - это:
спутники 11-1N, с которых поступают данные на приемник спутниковой навигационной системы 3;
любые подвижные объекты 2 (устройства), местоположение которых периодически необходимо определять;
приемник спутниковой навигационной системы, посредством которого принимают данные, поступающие со спутников, и передают на вычислительное устройство;
измерительное устройство инерционной навигационной системы 4, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по ортогональным осям;
вычислительное устройство, которое для осуществления способа соответственно по первому и второму вариантам выполнено таким образом, что позволяет:
по первому варианту - выполнять следующие вычислительные операции: перевести данные, поступающие с приемника спутниковой навигационной системы 3 из ECEF (геоцентрической фиксированной системы координат) в локальную систему координат; вычислить местоположение, скорость подвижного объекта и матрицы поворота R на основе данных, поступающих с измерительного устройства инерционной навигационной системы 4; вычислять вектор состояния и текущее местоположение подвижного объекта 2;
по второму варианту - выполнять следующие вычислительные операции: задать временной интервал τ, перевести данные, поступающие с приемника спутниковой навигационной системы 3 из ECEF (геоцентрической фиксированной системы координат) в локальную систему координат; вычислить местоположение, скорость подвижного объекта и матрицы поворота R на основе данных, поступающих с измерительного устройства инерционной навигационной системы 4; на каждом временном интервале τ корректировать матрицу поворота R; вычислять вектор состояния и текущее местоположение подвижного объекта 2.
Для подтверждения эффективности заявляемого изобретения (варианты способа) было проведено компьютерное моделирование его алгоритмов. Условия, при которых осуществлялось моделирование, приведены на фиг.4. В частности на этом чертеже показана зависимость числа спутников от прошедшего времени с начала движения. Система отсчета, связанная с подвижным объектом, может быть повернута на некоторые начальные углы относительно локальной системы координат. Зададим эти углы по осям X, Y, Z (-8°, 10°, 21°) соответственно. Начальную величину скорости движения зададим 10 м/с. Данные с измерительного устройства инерционной навигационной системы 4 поступают с частотой 10 Гц. Данные с приемника спутниковой навигационной системы поступают с частотой 1 Гц.
На фиг.5 показана траектория движения подвижного объекта:
1 - траектория движения подвижного объекта, рассчитанная по известному алгоритму [5],
2 - траектория движения подвижного объекта, рассчитанная по алгоритму заявляемого изобретения по первому варианту осуществления.
Рассматривался случай, когда известны начальное местоположение подвижного объекта 2 и его начальная скорость.
Из фиг.5 очевидно, что предложенный алгоритм согласно изобретению позволяет определять местоположение объекта в том случае, когда число видимых спутников менее четырех. Позволяет корректировать данные с измерительного устройства инерционной навигационной системы. Позволяет определить начальный угол между системой координат, связанной с подвижным объектом, и локальной системой. Если вычисления проводить в условиях ограниченной разрядности (точности) без введенных признаков алгоритма согласно изобретению, например как в известном техническом решении, то проявится неустойчивость алгоритма и вычисление местоположения объекта станет невозможным.
Компьютерное моделирование алгоритма по второму варианту осуществления заявляемого способа проводилось при условиях, аналогичных для моделирования алгоритма по первому варианту осуществления заявляемого способа, т.е. система отсчета, связанная с подвижным объектом, может быть повернута на некоторые начальные углы относительно локальной системы координат. Зададим эти углы по осям X, Y, Z (-8°, 10°, 21°) соответственно. Начальную величину скорости движения зададим 10 м/с. Данные с измерительного устройства инерционной навигационной системы поступают с частотой 10 Гц. Данные с приемника спутниковой навигационной системы поступают с частотой 1 Гц. Причем моделирование зависимости числа спутников от времени, прошедшего с начала движения подвижного объекта задавалась таким же образом, как показано на фиг.4. Однако большое количество спутников в начале движения было выбрано для определения начальных углов между системой координат, связанной с подвижным объектом, и локальной системой координат. Так как если бы в начале движения количество спутников было бы менее четырех, то определить этот угол не удалось.
На фиг.6 показана траектория движения подвижного объекта.
1 - траектория движения подвижного объекта, рассчитанная по известному алгоритму [5],
2 - траектория движения подвижного объекта, рассчитанная по алгоритму заявленного способа по второму варианту осуществления.
Рассматривался случай, когда известны начальное местоположение подвижного объекта 2 и его начальная скорость. Угол между системой координат, связанной с подвижным объектом, и локальной системой координат не известен.
Из фиг.6 очевидно, что предложенный алгоритм согласно изобретению позволяет определять местоположение объекта в том случае, когда число видимых спутников менее четырех. Позволяет корректировать данные с измерительного устройства инерционной навигационной системы. Позволяет определить начальный угол между системой координат, связанной с подвижным объектом, и локальной системой.
Было проведено также компьютерное моделирование для случая использования двух алгоритмов одновременно при тех же условиях, как показано на фиг.4.
На фиг.7 показана траектория движения подвижного объекта.
1 - траектория движения подвижного объекта, рассчитанная по алгоритму заявляемого изобретения по первому варианту осуществления.
2 - траектория движения подвижного объекта, рассчитанная по алгоритмам заявленного способа, когда одновременно используется способ по первому и второму вариантам осуществления.
Из фиг.7 следует, что предложенный алгоритм согласно изобретению позволяет определять местоположение объекта в том случае, когда число видимых спутников менее четырех. Позволяет корректировать данные с измерительного устройства инерционной навигационной системы. Позволяет определить начальный угол между системой координат, связанной с подвижным объектом, и локальной системой. Если вычисления проводить в условиях ограниченной разрядности (точности) без введенных признаков алгоритма согласно изобретению, например как в известном техническом решении, то проявится неустойчивость алгоритма и вычисление местоположения объекта станет невозможным.
Таким образом, проведенное компьютерное моделирование заявляемого способа (варианты) подтвердило не только высокую эффективность изобретения при определении местоположения подвижного объекта, но и позволяет разработчику построить систему таким образом, чтобы получить максимальный технический эффект при использовании заявляемого изобретения.
Заявляемое изобретение по первому варианту осуществления позволяет:
- существенно снизить объем вычислительных операций для определения местоположения подвижного объекта;
- снизить размеры вычислительного устройства, используемого на подвижном объекте, что делает возможным использовать его практически на любых подвижных объектах, имеющих даже маленькие размеры;
- обеспечить высокую точность определения местоположения подвижного объекта даже в сложных условиях, когда сигналы спутников экранированы рельефом или строениями, или прием сигналов спутников по каким-либо причинам временно не возможен.
Заявляемое изобретение по второму варианту осуществления позволяет обеспечить высокую точность определения местоположения подвижного объекта даже в сложных условиях, когда сигналы спутников экранированы рельефом или строениями, или прием сигналов спутников по каким-либо причинам временно не возможен, повысить устойчивость процедуры итеративной оценки координат подвижного объекта.
Использование изобретения по первому и/или второму вариантам дает широкую возможность выбора реализации позволяет разработчику построить систему таким образом, чтобы получить максимальный технический эффект при использовании заявляемого изобретения.
Изобретение относится к области радиотехники, в частности, к определению местоположения подвижного объекта посредством гибридной навигационной системы. Первый вариант заявленного способа заключается в том, что сформированные корреляционную матрицу ошибок инерционных измерений Q и корреляционную матрицу ошибок измерений W умножают на соответствующие им весовые коэффициенты, при вычислении прогнозируемых значений вектора состояния dx и корреляционной матрицы его ошибок выполняют обращение матрицы по соответствующей вычислительной формуле, элементы корреляционной матрицы ошибок вектора состояния сравнивают с заданной величиной порога, если хотя бы один из элементов превышает заданную величину порога, то для вычисления вектора состояния текущего этапа используют вычисленные значения матрицы ошибок вектора состояния предыдущего этапа, в случае превышения порога хотя бы одним из элементов, возвращается матрица дисперсии, вычисленная на предыдущем шаге. Второй вариант заявленного способа заключается в том, что сформированные корреляционную матрицу ошибок инерционных измерений Q и корреляционную матрицу ошибок измерений W умножают на соответствующие им весовые коэффициенты, при вычислении прогнозируемых значений вектора состояния dx и корреляционной матрицы его ошибок выполняют обращение матрицы по определенной вычислительной формуле, элементы корреляционной матрицы ошибок вектора состояния сравнивают с заданной величиной порога, если хотя бы один из элементов превышает заданную величину порога, то для вычисления вектора состояния текущего этапа используют вычисленные значения матрицы ошибок вектора состояния предыдущего этапа, в случае превышения порога хотя бы одним из элементов, возвращается матрица дисперсии, вычисленная на предыдущем шаге. Достигаемый технический результат - повышение точности определения местоположения подвижного объекта. 2 н.п. ф-лы, 7 ил.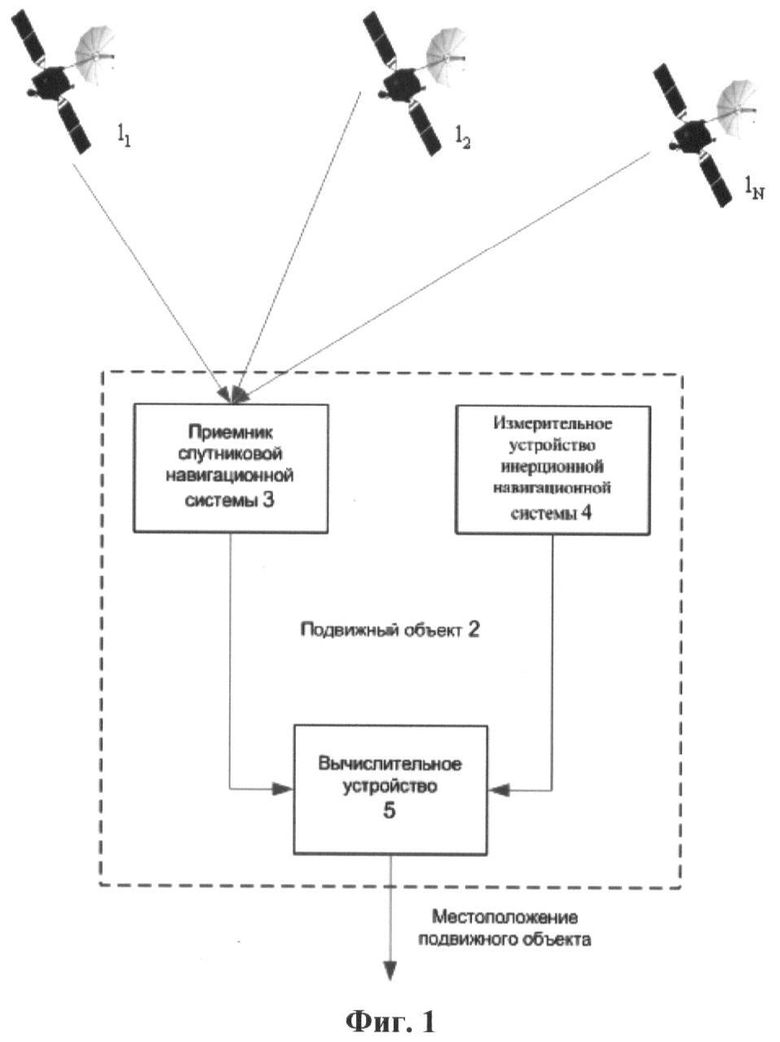
1. Способ определения местоположения подвижного объекта посредством гибридной навигационной системы, объединяющей приемник спутниковой навигационной системы для приема навигационного сигнала, который позволяет определять позицию спутников, скорость спутников, псевдорасстояния до объекта наблюдения и оценку допплеровского смещения несущей частоты навигационного сигнала, измерительное устройство инерционной навигационной системы и вычислительное устройство, расположенные на подвижном объекте, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по ортогональным осям, заключающийся в том, что считают, что начальное местоположение подвижного объекта и начальное значение вектора его скорости известно, принятые данные со спутников, которые находятся в зоне радиовидимости, используют для формирования посредством вычислительного устройства двух матриц поворота, одна из которых - матрица поворота для координат спутников, другая - матрица поворота для скоростей спутников, используя сформированные матрицы поворота посредством вычислительного устройства осуществляют преобразование координат спутников и их скоростей из геоцентрической фиксированной системы координат в локальную систему координат, принимают данные с измерительного устройства инерционной навигационной системы подвижного объекта - угловые скорости и линейные ускорения подвижного объекта, используя принятые данные об угловых скоростях подвижного объекта, формируют матрицу поворота R из системы координат, связанной с подвижным объектом, в локальную систему координат, используя сформированную матрицу поворота R, преобразуют полученные данные о линейных ускорениях подвижного объекта; формируют матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые измерительным устройством инерционной навигационной системы, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы, используя полученные преобразованные данные о линейных ускорениях подвижного объекта, а также значения местоположения, скорости, сформированные матрицы поворота, посредством вычислительного устройства вычисляют местоположение подвижного объекта и его скорость движения; преобразованные данные со спутников, матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, корреляционную матрицу ошибок измерения W, вычисленные местоположение подвижного объекта и его скорость движения, используют для формирования матрицы Н, описывающей линейную связь всех измерений с компонентами вектора состояния, для вычисления прогнозируемых значений вектора состояния dx и для вычисления корреляционной матрицы ошибок оценки компонентов вектора состояния Р, используя вычисленные значения, вычисляют вектор состояния и его корреляционную матрицу ошибок, по результатам вычисленного вектора состояния определяют текущее местоположение объекта, отличающийся тем, что сформированные корреляционную матрицу ошибок инерционных измерений Q и корреляционную матрицу ошибок измерений W умножают на соответствующие им весовые коэффициенты, используя вычислительное устройство, при вычислении прогнозируемых значений вектора состояния dx и корреляционной матрицы его ошибок выполняют посредством вычислительного устройства обращение матрицы по приближенной формуле:
(W+H·P·HT)-1≈1/W(1-H·P·HT/W),
где T - операция транспонирования матрицы,
при этом весовые коэффициенты выбирают таким образом, чтобы выполнялось условие H·P·HT/W<1, элементы корреляционной матрицы ошибок вектора состояния сравнивают с заданной величиной порога, если хотя бы один из элементов превышает заданную величину порога, то для вычисления вектора состояния текущего этапа используют вычисленные значения матрицы ошибок вектора состояния предыдущего этапа, в случае превышения порога хотя бы одним из элементов возвращается матрица дисперсии, вычисленная на предыдущем шаге.
2. Способ определения местоположения подвижного объекта посредством гибридной навигационной системы, объединяющей приемник спутниковой навигационной системы для приема навигационного сигнала, который позволяет определять позицию спутников, скорость спутников, псевдорасстояния до объекта наблюдения и оценку допплеровского смещения несущей частоты навигационного сигнала, измерительное устройство инерционной навигационной системы и вычислительное устройство, расположенные на подвижном объекте, с которого поступают угловые скорости по каждой ортогональной оси X, Y и Z, линейные ускорения по ортогональным осям, заключающийся в том, что считают, что начальное местоположение подвижного объекта и начальное значение вектора его скорости известно, а угол между системой координат, связанной с подвижным объектом, и локальной системой координат не известен; принятые данные со спутников, которые находятся в зоне радиовидимости, используют для формирования посредством вычислительного устройства двух матриц поворота, одна из которых - матрица поворота для координат спутников, другая - матрица поворота для скоростей спутников, используя сформированные матрицы поворота посредством вычислительного устройства осуществляют преобразование координат спутников и их скоростей из геоцентрической фиксированной системы координат в локальную систему координат; принимают данные с измерительного устройства инерционной навигационной системы подвижного объекта - угловые скорости и линейные ускорения подвижного объекта, используя принятые данные об угловых скоростях подвижного объекта, формируют матрицу поворота R из системы координат, связанной с подвижным объектом, в локальную систему координат, используя сформированную матрицу поворота R, преобразуют полученные данные о линейных ускорениях подвижного объекта; формируют матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые измерительным устройством инерционной навигационной системы, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы, используя полученные преобразованные данные о линейных ускорениях подвижного объекта, а также значения местоположения, скорости, сформированные матрицы поворота, посредством вычислительного устройства вычисляют местоположение подвижного объекта и его скорость движения; преобразованные данные со спутников, матрицу перехода для вектора состояния, корреляционную матрицу ошибок инерционных измерений Q, характеризующую измерения, осуществляемые измерительным устройством инерционной навигационной системы, корреляционную матрицу ошибок измерения W, характеризующую данные, поступающие с приемника спутниковой навигационной системы, вычисленные местоположение подвижного объекта и его скорость движения, используют для формирования матрицы Н, описывающей линейную связь всех измерений с компонентами вектора состояния, для вычисления прогнозируемых значений вектора состояния dx и для вычисления корреляционной матрицы ошибок оценки компонентов вектора состояния Р, используя вычисленные значения, вычисляют вектор состояния и его корреляционную матрицу ошибок, по результатам вычисленного вектора состояния определяют текущее местоположение объекта, отличающийся тем, что задают временной интервал τ, на каждом временном интервале τ из элементов вектора состояния посредством вычислительного устройства формируют вектор, элементы которого содержат значения ошибки в определении угла между системой координат, связанной с подвижным объектом, и локальной системой координат, элементам вектора состояния, соответствующим ошибке в определении угла между системой координат, связанной с подвижным объектом, и локальной системой координат, присваивают нулевые значения, используя сформированный вектор, вычисляют корректирующую матрицу поворота, используя которую выполняют коррекцию матрицы поворота R путем умножения ее на корректирующую матрицу, получая скорректированную матрицу поворота R за данный временной интервал τ, используют скорректированную матрицу поворота R для преобразования полученных данных о линейных ускорениях подвижного объекта и формирования матрицы перехода для вектора состояния.
| US 6900760 А1, 31.05.2005 | |||
| СПОСОБ (ВАРИАНТЫ) И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241958C9 |
| RU 2004132062 А, 10.04.2006 | |||
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| US 2004150557 А, 05.08.2004 | |||
| FR 2905470 А1, 07.03.2008 | |||
| JP 4020143 В2, 12.12.2007 | |||
| US 2007276593 А1, 29.11.2007. | |||

