Изобретение относится к области средств радионавигации и может быть использовано в приемниках сигналов спутниковых радионавигационных систем (СРНС), служащих для определения координат места потребителя и текущего времени по сигналам спутников СРНС ГЛОНАСС, GPS и им подобным.
Определение координатно-временной информации в приемниках сигналов СРНС производится на основе приема сигналов, излучаемых спутниками СРНС, и обработки их параметров: частот принимаемых сигналов и их задержек относительно местной шкалы времени. Для надежного определения координат места потребителя и текущего времени необходим одновременный устойчивый прием сигналов от нескольких спутников, количество которых должно быть не меньше количества одновременно определяемых ортогональных параметров, что составляет обычно четыре и более. Как правило, количество реально принимаемых сигналов СРНС в пределах их рабочих зон значительно больше (см., например, [1] - Ю.А.Соловьев. Спутниковая навигация и ее приложения / М.: Эко-Трендз, 2003, с.13-14, рис.1.2, с.32-33, рис.2.1), что позволяет успешно решать широкий круг разнообразных задач координатно-временного обеспечения.
Известны многоканальные приемники сигналов СРНС, работающие по сигналам СРНС ГЛОНАСС и GPS, описанные в патентах: [2] - RU № 2146378 (C1), G01S 5/14, 10.03.2000; [3] - RU № 2167431 (C2), G01S 5/14, 27.01.2001; [4] - RU № 2178894 (C1), G01S 5/14, 27.01.2002; [5] - EP № 1052786 (A1), G01S 1/00, G01S 5/14, H04B 7/185, 15.11.2000.
Обобщенная структурная схема этих приемников состоит из блока радиочастотного преобразования, блока многоканальной корреляционной обработки и вычислителя, связанного с периферийными устройствами - индикаторной панелью и панелью управления. Блок радиочастотного преобразования осуществляет селективный прием и усиление сигналов в заданной полосе частот с разделением сигналов по системам (ГЛОНАСС, GPS), преобразование несущей частоты сигналов с понижением частоты и последующее преобразование сигналов в цифровую форму. Для выполнения этих функций блок радиочастотного преобразования содержит аналоговые фильтры, усилители, преобразователи частоты (аналоговые смесители), аналого-цифровые преобразователи (дискретизаторы), а также формирователь тактовых и гетеродинных сигналов. Вычислитель и блок многоканальной корреляционной обработки выполняют совместно комплекс операций по выделению полезных сигналов из шумов и помех, разделению их на составляющие, относящиеся к разным спутникам, извлечению из этих составляющих навигационных параметров и служебной информации, преобразованию в выходные данные соответственно требованиям потребителя и выдачу выходных результатов на индикаторную панель или в другой форме, нужной потребителю. Вычислитель состоит из процессора, локального хранителя шкалы времени и запоминающего устройства, включающего в себя постоянную память для хранения программ и постоянных величин и оперативную память для хранения промежуточных результатов вычислений. Блок многоканальной корреляционной обработки состоит из N каналов, каждый из которых способен обрабатывать сигнал любого спутника. Все каналы связаны, с одной стороны, с выходом блока радиочастотного преобразования, а, с другой, через шину обмена данными - с вычислителем. Работа всех блоков синхронизируется тактовыми сигналами. В приемниках [2]÷[5] тактовые сигналы формируются в блоке радиочастотного преобразования, в качестве опорного сигнала при этом может использоваться либо сигнал собственного кварцевого генератора, либо внешний опорный сигнал, например, получаемый от стандарта частоты и времени.
Каналы блока многоканальной корреляционной обработки в приемниках [2]÷[5] выполнены по типовой схеме, представленной в [2, фиг.4], [3, фиг.3], [4, фиг.3], [5, фиг.6], в состав которой входят коммутатор сигналов систем (ГЛОНАСС или GPS), регистр управления, цифровой управляемый генератор несущей, цифровые смесители синфазного и квадратурного каналов обработки, блоки цифровых демодуляторов, накопительные блоки синфазного и квадратурного каналов обработки, а также цифровой управляемый генератор кода, генератор опорного кода и программируемая линия задержки. Основные процедуры, осуществляемые в каждом из каналов блока многоканальной обработки сигналов приемников [2]÷[5], заключаются в корреляции сигнала, поступающего с выхода коммутатора сигналов систем, с копией искомого сигнала и накопления результатов корреляции в накопительных блоках в течение определенного интервала времени. Обычно этот интервал составляет одну миллисекунду, что соответствует длине кодовой псевдослучайной последовательности (ПСП) опорного С/А кода СРНС GPS и ГЛОНАСС. Указанная корреляция осуществляется путем умножения цифровых отсчетов входного сигнала на генерируемую внутри канала локальную копию искомого сигнала, т.е. копию сигнала выбранного спутника СРНС. Замыкание петель слежения за задержкой опорного кода и частотой сигнала осуществляется с помощью вычислителя. Вычислитель считывает информацию из накопителей, обрабатывает ее с помощью соответствующих программ и вырабатывает управляющие сигналы обратной связи для цифровых генераторов несущей и кода, замыкая тем самым петли слежения.
Процедуре слежения за сигналами предшествует на начальном этапе процедура поиска и обнаружения сигналов спутников, по которым можно работать в данное время.
Поиск сигнала спутника осуществляется по двум параметрам - частоте и символам ПСП опорного кода. Совокупность всех позиций поиска по частоте и символам ПСП опорного кода определяет область поиска. Изменение позиций поиска по частоте осуществляется путем дискретного изменения частоты выходных сигналов цифрового управляемого генератора несущей. Изменение позиций поиска по символам ПСП опорного кода осуществляется путем дискретного изменения задержки опорного кода в программируемой линии задержки. Процедура поиска сигнала спутника заключается в последовательном переборе всех частотно-временных позиций области поиска и сравнении накопленных результатов корреляционной обработки с заданным порогом обнаружения. В приемниках [2]÷[5] этот порог устанавливается исходя из заданных вероятностей пропуска и ложной тревоги для наименьшего уровня сигналов. По результатам исследований конкретной частотно-временной позиции принимается решение об отсутствии или наличии сигнала спутника на данной позиции.
Источником данных для поиска сигналов спутников, по которым следует работать, начиная с момента включения приемника, является априорная информация о месте нахождения приемной антенны приемника, априорная информация о текущем времени, а также информация о действующих спутниках СРНС и их расположении в пространстве. Использование априорной информации ускоряет поиск сигналов и соответственно получение навигационного решения. Априорная информация периодически корректируется на основе служебной информации, извлекаемой из принимаемых сигналов. Кроме этого, в процессе слежения за сигналами производится текущее уточнение и обновление априорных данных по результатам расчета текущих координат спутника на орбите, например, с использованием способа, описанного в [6] - US № 6567712 (B1), G01C 21/12, 20.05.2003.
При перерывах в работе приемника необходимая для возобновления работы информация о времени сохраняется в локальном хранителе шкалы времени вычислителя, а о положении спутников на орбитах - в его памяти. Однако с увеличением длительности перерыва эта информация стареет, достоверность сохраняемых данных снижается, что создает проблему для возобновления работы приемника.
В частном случае, имеющем ограниченную область применения, проблема выбора рабочих спутников при включении приемника в работу может быть решена за счет информационной поддержки со стороны базовой станции, связанной радиоканалом с приемником и оснащенной средствами для собственного формирования эфемеридных данных, данных о номерах видимых спутников и доплеровском сдвиге частот, а также данных о приблизительном местоположении приемника, см., например, [7] - US № 6480557 (B1), H04B 1/10, 12.11.2002; [8] - US № 6690323 (B1), G01S 5/02, H04B 7/185, 10.02.2004.
В общем случае при отсутствии достоверных данных для выбора рабочих спутников приемник при своем включении начинает работу со слепого поиска сигналов. Цель слепого поиска - в условиях отсутствия «свежих» данных набрать необходимое для работы количество спутников, сигналы которых принимаются в данное время в точке нахождения приемника. При слепом поиске осуществляют обзор элементарных участков области неопределенности путем регулярного или случайного сканирования, где под областью неопределенности подразумевается список спутников, входящих в состав СРНС, и диапазоны по частоте и по задержке, в пределах которых сигналы этих спутников могут быть приняты. В обобщенном виде способ слепого поиска сигналов спутников СРНС изложен в [9] - Сетевые спутниковые радионавигационные системы / B.C.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. Под ред. B.C.Шебшаевича. - М.: Радио и связь, 1993, с.122-124.
Слепой поиск сигналов спутников начинается с поиска сигнала первого спутника из списка поиска, содержащего обозначения всех спутников СРНС, и продолжается до получения достаточного для навигационных измерений количества обнаруженных сигналов. Поиск сигнала спутника осуществляется в соответствии со стандартной процедурой, в процессе осуществления которой для каждой возможной позиции из диапазона поиска решается известная задача обнаружения - принятия решения о наличие или отсутствии на данной позиции сигнала. При обнаружении сигнала спутника, если общее количество сигналов недостаточно для решения навигационной задачи, выбирается следующий спутник из списка поиска (и так далее, до получения достаточного количества сигналов). То же самое (выбор следующего спутника из списка оставшихся) происходит, если сигнал спутника не обнаружен. Это имеет место, например, в случае нахождения спутника под горизонтом или затенения его сигнала каким либо мешающим объектом.
Данный способ слепого поиска может выполняться как в одноканальном, так и в многоканальном приемнике, выполненном по типу приемников, описанных в [2]÷[5]. Во втором случае многоканальный приемник предоставляет возможность начинать слепой поиск с одновременного поиска n≤N первых сигналов из списка поиска, где N - число каналов многоканального приемника, определяемое числом каналов блока многоканальной корреляционной обработки. Одновременный поиск n сигналов увеличивает вероятность обнаружения на первом шаге поиска хотя бы одного, а зачастую - и большего количества сигналов, доступных в точке приема. За счет этого поиск в многоканальном приемнике ускоряется (по сравнению с одноканальным приемником) в среднем пропорционально количеству используемых каналов, а, кроме этого, при обнаружении сигналов соответствующие каналы могут сразу перейти к их обработке и извлечению из них навигационных параметров. Такой вариант поиска реализован, в частности, в 12-канальном приемнике «eTrex» фирмы GARMIN, см. [10] - eTrex.series specifications. - GARMIN International, USA, 2000 (Рекламные материалы фирмы GARMIN, США), на экране которого визуально отображаются все последовательности указанного выбора спутников и результаты поиска их сигналов.
Аналогичный способ одновременного параллельного поиска сигналов для нескольких спутников в многоканальном приемнике сигналов СРНС, при котором процедура поиска сигнала для каждого спутника заключается в последовательном просмотре возможных значений задержек и доплеровских смещений частоты сигнала и сравнении результатов поиска с порогом, описан в [11] - Глобальная спутниковая радионавигационная система ГЛОНАСС / В.А.Болдин, В.И.Зубинский, Ю.Г.Зурабов и др. Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, 1998, с.74-78, рис.6.1. с.192-193.
Способ поиска сигналов спутников в многоканальном приемнике сигналов СРНС, описанный в [11], принят в качестве прототипа.
Способ-прототип состоит в следующем. Осуществляют выбор спутников по списку поиска в соответствии с числом каналов, используемых при параллельном поиске. В каждом из каналов осуществляют поиск назначенного из списка сигнала, используя стандартные операции поиска и обнаружения сигнала, т.е. для каждой возможной позиции из диапазона поиска решают задачу обнаружения - принятия решения о наличие или отсутствии на этой позиции сигнала. Если в каком-либо канале сигнал не обнаружен, то осуществляют выбор следующего спутника из списка оставшихся и повторяют операции поиска и обнаружения сигнала до получения достаточного (для осуществления навигационных измерений) количества обнаруженных сигналов.
При поиске используют квадратурные составляющие I и Q сигнала, преобразованного в канале блока многоканальной корреляционной обработки, а обнаружение сигнала в элементарной ячейке поиска осуществляют в соответствии с алгоритмом простого квадратурного обнаружителя (I2+Q2)≥h, где h - порог, выбираемый из условия обеспечения заданной вероятности правильного обнаружения.
Недостаток способа-прототипа связан с тем, что при поиске каждым каналом своего сигнала время работы по отдельному сигналу получается достаточно большим. При этом первый результат поиска сигнала (есть какой-то сигнал или его нет) появляется только по завершении процедуры в каком-либо канале либо обнаружением сигнала, либо решением о его отсутствии. При отсутствии сигнала в канале требуется большое время на проверку всего диапазона поиска; при наличии сигнала длительность его поиска определяется временем достижения позиции, на которой этот сигнал находится.
Очевидно, что время поиска нужного количества сигналов зависит от затрат времени на обнаружение каждого сигнала из присутствующих в эфире, а также на просмотр всего диапазона поиска каждого из сигналов, выбор которых оказался неудачным. Если по результатам первого этапа многоканального слепого поиска не удалось набрать нужного количества рабочих сигналов, неизбежен второй этап поиска, но перейти к нему можно только после освобождения каналов, которые были заняты поиском отсутствующих сигналов.
Есть случаи, когда время, затрачиваемое на получение первого отсчета координат, желательно сократить в любом режиме работы аппаратуры, в том числе и при выполнении рассматриваемого слепого поиска сигналов.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа слепого поиска сигналов в многоканальном приемнике сигналов СРНС, обеспечивающего сокращение среднего времени поиска необходимого для навигационных измерений количества сигналов СРНС.
Сущность изобретения состоит в том, что в способе поиска сигналов спутников в многоканальном приемнике сигналов СРНС, заключающемся в том, что осуществляют поиск сигналов спутников, включенных в список поиска, до получения достаточного для навигационных измерений количества обнаруженных сигналов, в отличие от прототипа, первыми в список поиска включают в произвольной последовательности три спутника, обеспечивающих максимальное покрытие поверхности Земли, а последующие спутники включают в список поиска в порядке, определяемом максимальной суммой средних расстояний от каждого из них до всех спутников, расположенных в списке поиска ближе к его началу, осуществляют поиск сигналов каждого проверяемого спутника, начиная с первого спутника из списка поиска, одновременно всеми свободными каналами приемника с распределением диапазона поиска между каналами, при этом поиск сигналов спутников осуществляют последовательно по списку поиска до первого обнаружения сигнала, после чего поиск сигналов последующих спутников, оставшихся в списке поиска, осуществляют в порядке, определяемом максимальной разностью между суммой средних расстояний выбираемого для проверки спутника от всех предыдущих проверенных спутников с необнаруженными сигналами и суммой средних расстояний этого спутника от всех предыдущих проверенных спутников с обнаруженными сигналами. В частном случае реализации способа первыми в список поиска включают три спутника, сумма средних расстояний между которыми максимальна.
Таким образом, в отличие от способа-прототипа, в заявляемом способе последовательность поиска сигналов спутников подчиняется следующему правилу: поиск начинается со спутников, обеспечивающих максимальное покрытие поверхности Земли, продолжается добавлением к ним наиболее удаленных от них спутников, и так до получения первого положительного результата, после чего последовательность поиска определяется степенью близости выбираемого для проверки спутника к проверенным спутникам, сигналы которых обнаружены, и удаленности от проверенных спутников, сигналы которых не обнаружены. Такая последовательность поиска в сочетании с тем, что поиск сигнала каждого проверяемого спутника осуществляется одновременно всеми свободными каналами приемника с распределением диапазона поиска между каналами, обеспечивает сокращение среднего времени поиска необходимого для навигационных измерений количества сигналов СРНС.
Сущность заявляемого способа и возможность его осуществления поясняются иллюстративными материалами, представленными на фиг.1, 2 и 3,
где на фиг.1 представлена обобщенная структурная схема многоканального приемника сигналов СРНС, в котором реализуется предложенный способ;
на фиг.2 - обобщенная структурная схема одного канала блока многоканальной корреляционной обработки в многоканальном приемнике сигналов СРНС;
на фиг.3 - блок схема алгоритма, поясняющая последовательность операций заявляемого способа.
Обобщенная структурная схема многоканального приемника СРНС (фиг.1) состоит из связанных друг с другом блока 1 радиочастотного преобразования, блока 2 многоканальной корреляционной обработки, состоящего из N каналов 3 (31, 32, ..., 3N), каждый из которых способен обрабатывать сигнал любого спутника, вычислителя 4 и блока 5 периферийных устройств.
Блок 5 периферийных устройств предназначен для ручного ввода управляющих команд и данных и индикации выходных данных. В состав блока 5 периферийных устройств входят, например, панель управления и индикаторная панель (на фиг.1 не показаны).
Блок 1 радиочастотного преобразования предназначен для осуществления селективного приема и усиления сигналов в заданной полосе частот с разделением сигналов по системам (ГЛОНАСС, GPS), преобразования несущей частоты сигналов с понижением частоты и последующего преобразования сигналов в цифровую форму, пригодную для обработки в блоке 2. В блоке 1 радиочастотного преобразования также формируются тактовые сигналы (Fт), синхронизирующие работу всех блоков приемника. В рассматриваемом случае блок 1 радиочастотного преобразования может быть выполнен в соответствии с известной схемой, представленной в [2, фиг.3].
Вычислитель 4 предназначен для осуществления операций, связанных с вычислениями, формированием необходимых для работы приемника внутренних команд, хранением управляющих программ и данных, формированием выходных данных, в том числе данных, отображаемых на индикаторной панели блока 5 периферийных устройств. Вычислитель 4 состоит из процессора, локального хранителя шкалы времени и запоминающего устройства, включающего в себя постоянную память для хранения программ и постоянных величин и оперативную память для хранения промежуточных результатов вычислений (на фиг.1 не показаны).
Блок 2 многоканальной корреляционной обработки предназначен для выполнения совместно с вычислителем 4 комплекса операций по поиску и обнаружению сигналов спутников, при которых осуществляется выделение полезных сигналов из шумов и помех и разделение их на составляющие, относящиеся к разным спутникам, а также комплекса операций, связанных с последующим слежением за обнаруженными сигналами и извлечением из них навигационных данных и служебной информации. При этом при поиске сигнала одного спутника используются сразу несколько каналов 3, свободных от слежения, а при слежении - один, тот, в котором первым был обнаружен сигнал данного спутника.
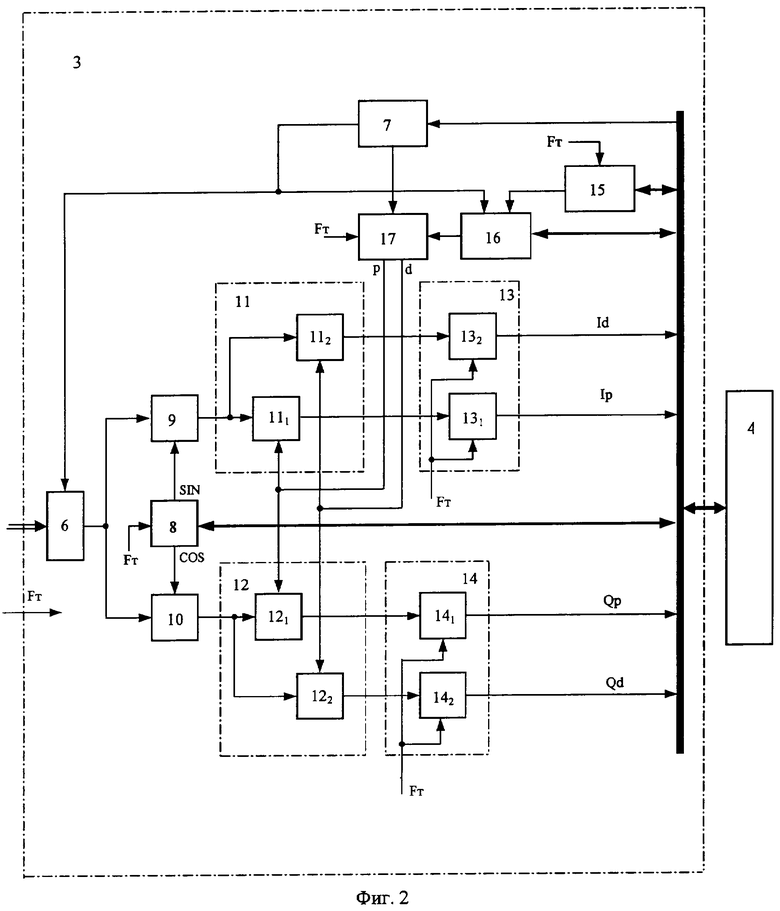
В рассматриваемом случае каждый из каналов 3 (31, 32, ..., 3N) блока 2 многоканальной корреляционной обработки выполнен в соответствии с известной схемой, представленной в [2, фиг.4]. В состав этой схемы входят (см. фиг.2) коммутатор 6 - коммутатор сигналов систем (ГЛОНАСС или GPS), регистр 7 управления, цифровой управляемый генератор 8 несущей, цифровые смесители 9 и 10 синфазного и квадратурного каналов обработки, блоки 11 и 12 цифровых демодуляторов синфазного и квадратурного каналов обработки, состоящие из цифровых демодуляторов 111, 112 и 121, 122, накопительные блоки 13 и 14 синфазного и квадратурного каналов обработки, состоящие из накопителей 131, 132 и 141, 142, а также цифровой управляемый генератор 15 кода, генератор 16 опорного кода и программируемая линия задержки 17.
Сигнальные входы цифровых демодуляторов 111 и 112 соединены между собой и образуют сигнальный вход блока 11, выходы цифровых демодуляторов 111 и 112 образуют выходы блока 11, а опорные входы цифровых демодуляторов 111 и 112 образуют опорные входы блока 11. Сигнальные входы цифровых демодуляторов 121 и 122 соединены между собой и образуют сигнальный вход блока 12, выходы цифровых демодуляторов 121 и 122 образуют выходы блока 12, а опорные входы цифровых демодуляторов 121 и 122 образуют опорные входы блока 12.
Выходы накопителей 131 и 132 образуют выходы блока 13, сигнальные входы накопителей 131 и 132 образуют сигнальные входы блока 13, а соединенные между собой тактовые входы накопителей 131 и 132 образуют тактовый вход блока 13. Выходы накопителей 141 и 142 образуют выходы блока 14, сигнальные входы накопителей 141 и 142 образуют сигнальные входы блока 14, а соединенные между собой тактовые входы накопителей 141 и 142 образуют тактовый вход блока 14.
Сигнальные входы коммутатора 6, образующие сигнальные входы канала 3, связаны с сигнальными выходами (выходами сигналов ГЛОНАСС и GPS) блока 1 радиочастотного преобразования. Сигнальные входы цифровых смесителей 9 и 10 связаны с выходом коммутатора 6, а их опорные входы связаны соответственно с первым и вторым выходами цифрового управляемого генератора 8 несущей. Сигнальные входы блоков 11 и 12 цифровых демодуляторов связаны соответственно с выходами цифровых смесителей 9 и 10, а их выходы связаны с соответствующими входами накопительных блоков 13 и 14. Выходы накопительных блоков 13 и 14 связаны через шину обмена данными с вычислителем 4. Выход цифрового управляемого генератора 15 кода связан с сигнальным входом генератора 16 опорного кода, выход которого связан с сигнальным входом программируемой линии задержки 17. Выходы управляемой линии задержки 17 связаны с соответствующими опорными входами блоков 11 и 12 цифровых демодуляторов (опорными входами цифровых демодуляторов 111, 112, 121, 122). При этом первый выход управляемой линии задержки 17, на котором формируется «точная» («р») копия опорного кода, связан с опорными входами цифровых демодуляторов 111 и 121, а второй выход управляемой линии задержки 17, на котором формируется «смещенная» («d») копия опорного кода, связан с опорными входами цифровых демодуляторов 112 и 122. Управляющий вход программируемой линии задержки 17 связан с первым выходом регистра 7 управления, второй выход которого связан с управляющими входами коммутатора 6 и генератора 16 опорного кода. Цифровой управляемый генератор 8 несущей, регистр 7 управления, цифровой управляемый генератор 15 кода, генератор 16 опорного кода связаны через шину обмена данными с вычислителем 4. Тактовые входы цифрового управляемого генератора 8 несущей, накопительных блоков 13 и 14, программируемой линии задержки 17, цифрового управляемого генератора 15 кода связаны с тактовым входом канала 3, соединенным с выходом тактовых сигналов (Fт) блока 1 радиочастотного преобразования.
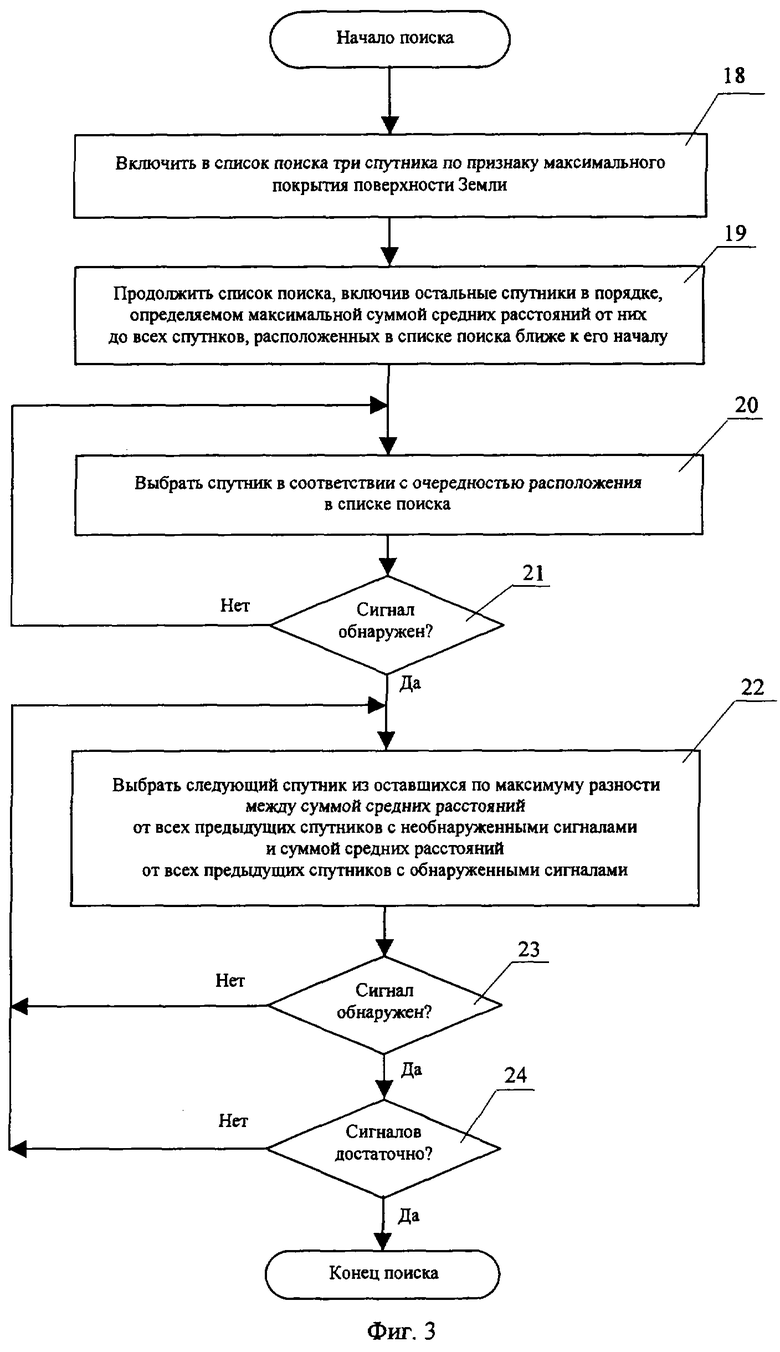
Слепой поиск сигналов спутников в соответствии с заявляемым способом осуществляется в многоканальном приемнике сигналов СРНС по следующему алгоритму (фиг.3).
Вначале формируют список поиска, в котором первыми включают в произвольной последовательности три спутника, обеспечивающих максимальное покрытие поверхности Земли, а последующие спутники включают в список поиска в порядке, определяемом максимальной суммой средних расстояний от каждого из них до всех спутников, расположенных в списке поиска ближе к его началу (фиг.3, блоки 18, 19). В частном случае первыми в список поиска включают три спутника, сумма средних расстояний между которыми максимальна. Формируют список поиска средствами вычислителя 4, хранение списка поиска осуществляют в его оперативной памяти. Поскольку при слепом поиске отсутствуют априорные сведения о текущем времени, состоянии системы и видимости спутников в точке, координаты которой надо определить, для составления списка поиска используют средние расстояния между спутниками, полученные осреднением за период обращения. В качестве первичной информации, из которой формируют средние расстояния, могут быть использованы, например, данные, полученные на основе теоретически известного или когда-то принятого альманаха, а при включениях приемника эти данные могут обновляться для использования в последующих сеансах поиска.
Затем осуществляют поиск сигналов спутников по списку поиска последовательно, начиная с первого по списку спутника, до первого обнаружения сигнала (фиг.3, блоки 20, 21).
Поиск сигнала проверяемого спутника осуществляют одновременно всеми свободными каналами 3 с распределением диапазона поиска между каналами 3. Канал, в котором происходит обнаружение сигнала проверяемого спутника, переходит к режиму слежения за обнаруженным сигналом, оставшиеся каналы переходят к поиску сигналов следующих спутников. При этом после первого обнаружения сигнала правило выбора последующих спутников меняют в связи с появлением нового вида информации в истории поиска - найденных сигналов. Теперь поиск сигналов последующих спутников, оставшихся в списке поиска, осуществляют в порядке, определяемом максимальной разностью между суммой средних расстояний выбираемого для проверки спутника от всех предыдущих проверенных спутников с необнаруженными сигналами и суммой средних расстояний этого спутника от всех предыдущих проверенных спутников с обнаруженными сигналами, т.е. ищут сигналы спутников, максимально удаленных от спутников с необнаруженными сигналами и максимально близких к спутникам с обнаруженными сигналами (фиг.3, блоки 22, 23).
Поиск в таком порядке продолжают до получения достаточного для осуществления навигационных измерений количества сигналов (фиг.3, блок 24).
Операции по поиску сигналов спутников, осуществляемые в заявляемом способе, являются известными операциями, аналогичными осуществляемым в многоканальных приемниках [2]÷[5], [7], [8].
В обобщенном виде процедура поиска сигнала спутника в отдельном канале 3i включает в себя следующие стандартные этапы. В начале процесса поиска вычислитель 4, исходя из списка поиска и заданного распределения диапазона поиска между каналами 3, устанавливает начальную частотно-временную позицию поиска в канале 3i, т.е. задает частоту несущей для цифрового управляемого генератора 8 несущей, частоту кода для цифрового управляемого генератора 15 кода и положение «точной» («р») и «смещенной» («d») копий опорного С/А кода СРНС ГЛОНАСС или GPS с помощью регистра 7 управления. В соответствии с командой вычислителя 4, выдаваемой в регистр 7 управления, коммутатор 6 подключает на свой выход сигналы нужной системы ГЛОНАСС или GPS. Сигналы этой системы поступают на сигнальные входы цифровых смесителей 9 и 10, на опорные входы которых поступают квадратурные сигналы («SIN» и «COS») опорной частоты с соответствующих выходов цифрового управляемого генератора 8 несущей. Цифровой управляемый генератор 8 несущей обеспечивает формирование квадратурных сигналов промежуточной частоты заданной литеры СРНС ГЛОНАСС, двоичный код которой выдается вычислителем 4, или промежуточной частоты сигналов СРНС GPS. Цифровые смесители 9 и 10 обеспечивают выделение сигналов заданной литеры СРНС ГЛОНАСС или сигналов спутников СРНС GPS и перенос спектров этих сигналов в основную полосу частот (на нулевую частоту). С выходов цифровых смесителей 9 и 10 сигналы поступают на сигнальные входы блоков 11 и 12 цифровых демодуляторов. На опорные входы блоков 11 и 12 цифровых демодуляторов с первого и второго выходов программируемой линии задержки 17 поступают соответственно «точная» («р») и «смещенная» («d») копии опорного С/А кода СРНС ГЛОНАСС или GPS. Блоки 11 и 12 цифровых демодуляторов с помощью входящих в их состав цифровых демодуляторов 111, 112 и 121, 122 осуществляют корреляцию принимаемых сигналов с «точной» («р») и «смещенной» («d») копиями опорного С/А кода СРНС ГЛОНАСС или GPS. Программируемая линия задержки 17 работает по сигналам, поступающим с выхода генератора 16 опорного кода, формирующего опорные псевдослучайные С/А коды спутников СРНС ГЛОНАСС или GPS. Необходимый для работы генератора 16 сигнал тактовой частоты 1,023 МГц для GPS или 0,511 МГц для ГЛОНАСС подается на его сигнальный вход с выхода цифрового управляемого генератора 15 кода. Выбор вида вырабатываемой псевдослучайной кодовой последовательности и значения тактовой частоты опорного кода осуществляется по командам вычислителя 4, поступающим через шину обмена данными на генераторы 15 и 16. Результаты корреляции накапливаются в накопительных блоках 13 и 14 в соответствующих накопителях 131, 132 и 141, 142, а именно, накопитель 131 накапливает синфазную компоненту корреляции точной копии сигнала (Ip), накопитель 132 накапливает синфазную компоненту корреляции смещенной копии сигнала (Id), накопитель 141 накапливает квадратурную компоненту корреляции точной копии сигнала (Qp), а накопитель 142 накапливает квадратурную компоненту корреляции смещенной копии сигнала (Qd). Период накопления равен периоду опорного С/А кода, т.е. 1 мс. Накопленные в накопителях 131, 132, 141, 142 данные (Ip, Qp, Id, Qd) периодически считываются вычислителем 4, в котором реализуются алгоритмы обнаружения сигнала, например, как в прототипе, алгоритм простого квадратурного обнаружителя [I2 p(d)+Q2 p(d)]≥h, где h - порог, выбираемый из условия обеспечения заданной вероятности правильного обнаружения. Если в результате сравнений выявляется превышение порога, то принимается решение об обнаружении сигнала на данной частотно-временной позиции поиска. Далее осуществляется процедура подтверждения, при завершении которой принимается решение об окончании или продолжении процедуры поиска на следующих позициях поиска. Изменение позиций поиска по частоте осуществляется путем дискретного изменения частоты выходных сигналов цифрового управляемого генератора 8 несущей. Изменение позиций поиска по символам ПСП опорного кода осуществляется путем дискретного изменения задержки опорного кода в программируемой линии задержки 17.
Если принимается решение об обнаружении сигнала в канале 3i, то процедура поиска сигнала в данном канале, а также в остальных каналах, занятых поиском сигнала данного спутника, прекращается. Канал 3i переходит к процедуре слежения за обнаруженным сигналом, а остальные каналы, освободившиеся от поиска сигнала данного спутника, переориентируются на поиск сигнала следующего спутника из списка поиска.
Если после обработки всех установленных для канала 3i позиций поиска сигнал в канале 3i не обнаружен, вычислитель 4 переориентирует этот канал на поиск сигнала следующего спутника из списка поиска.
Таким образом, с помощью заявляемого способа осуществляется слепой поиск сигналов спутников в многоканальном приемнике СРНС. При этом по сравнению с прототипом заявляемый способ обладает следующими особенностями: поочередный поиск сигналов спутников концентрирует ресурсы приемника на поиске до его завершения принятием решения, которое идет в историю поиска и используется для повышения вероятности обнаружения на следующем этапе поиска; поиск сигнала спутника всеми свободными каналами приемника сокращает время работы по сигналу этого спутника пропорционально количеству используемых при поиске каналов и уменьшает время на формирование очередного события истории поиска сигналов; использование сведений о средних расстояниях между спутниками СРНС и реальной истории поиска уменьшает вероятность назначения на поиск спутников, сигналы которых принять в текущем сеансе работы нереально. Совокупность указанных особенностей приводит к сокращению средней длительности слепого поиска.
Из рассмотренного следует, что заявляемое изобретение технически осуществимо и решает поставленную задачу по разработке способа слепого поиска сигналов в многоканальном приемнике сигналов СРНС, обеспечивающего сокращение среднего времени поиска необходимого для навигационных измерений количества сигналов СРНС.
Источники информации
1. Ю.А.Соловьев. Спутниковая навигация и ее приложения / М.: Эко-Трендз, 2003, с.13-14, рис.1.2, с.32-33, рис.2.1.
2. RU № 2146378 (C1), G01S 5/14, опубл. 10.03.2000.
3. RU № 2167431 (C2), G01S 5/14, опубл. 27.01.2001.
4. RU № 2178894 (C1), G01S 5/14, опубл. 27.01.2002.
5. ЕР № 1052786 (A1), G01S 1/00, G01S 5/14, H04B 7/185, опубл. 15.11.2000.
6. US № 6567712 (B1), G01C 21/12, опубл. 20.05.2003.
7. US № 6480557 (B1), H04B 1/10, опубл. 12.11.2002.
8. US № 6690323 (B1), G01S 5/02, H04B 7/185, опубл. 10.02.2004.
9. Сетевые спутниковые радионавигационные системы / B.C.Шебшаевич, П.П.Дмитриев, Н.В.Иванцевич и др. Под ред. B.C.Шебшаевича. - М.: Радио и связь, 1993, с.122-124.
10. eTrex.series specifications. - GARMIN International, USA, 2000 (Рекламные материалы фирмы GARMIN, США).
11. Глобальная спутниковая радионавигационная система ГЛОНАСС / В.А.Болдин, В.И.Зубинский, Ю.Г.Зурабов и др. Под ред. В.Н.Харисова, А.И.Перова, В.А.Болдина. - М.: ИПРЖР, 1998, с.74-78, рис.6.1. с.192-193.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ КОРРЕЛЯТОР ПРИЕМНИКА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2310212C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2167431C2 |
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| МНОГОКАНАЛЬНЫЙ КОРРЕЛЯТОР И ПРИЕМНИК НАВИГАЦИОННЫЙ | 2008 |
|
RU2388009C2 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С УСТРОЙСТВОМ БЫСТРОГО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ В УСЛОВИЯХ ВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2006 |
|
RU2341898C2 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| Приемник аппаратуры потребителей сигналов глобальных навигационных спутниковых систем, обеспечивающий обнаружение и блокирование ложных навигационных сигналов | 2024 |
|
RU2829323C1 |
| ЦИФРОВОЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2011 |
|
RU2467351C1 |
Изобретение относится к области радионавигации и может быть использовано в приемниках сигналов спутниковых радионавигационных систем (СРНС), служащих для определения координат места потребителя и текущего времени по сигналам спутников СРНС ГЛОНАСС, GPS и им подобным. Техническим результатом является разработка способа слепого поиска сигналов в многоканальном приемнике сигналов СРНС, обеспечивающего сокращение среднего времени поиска необходимого для решения навигационной задачи количества сигналов СРНС. В способе осуществляют поиск сигналов спутников, включенных в список поиска, до получения достаточного для навигационных измерений количества обнаруженных сигналов. Первыми в список поиска включают в произвольной последовательности три спутника, обеспечивающих максимальное покрытие поверхности Земли. Последующие спутники включают в список поиска в порядке, определяемом максимальной суммой средних расстояний от каждого из них до всех спутников, расположенных в списке ближе к его началу. Поиск сигналов каждого проверяемого спутника осуществляют одновременно всеми свободными каналами приемника с распределением диапазона поиска между каналами. Поиск сигналов спутников осуществляют по указанному списку последовательно, начиная с первого в списке, до первого обнаружения сигнала. Поиск сигналов последующих спутников, оставшихся в указанном списке, осуществляют в порядке, определяемом максимальной разностью между суммой средних расстояний выбираемого для проверки спутника от всех предыдущих проверенных спутников с необнаруженными сигналами и суммой средних расстояний этого спутника от всех предыдущих проверенных спутников с обнаруженными сигналами. 1 з.п. ф-лы, 3 ил.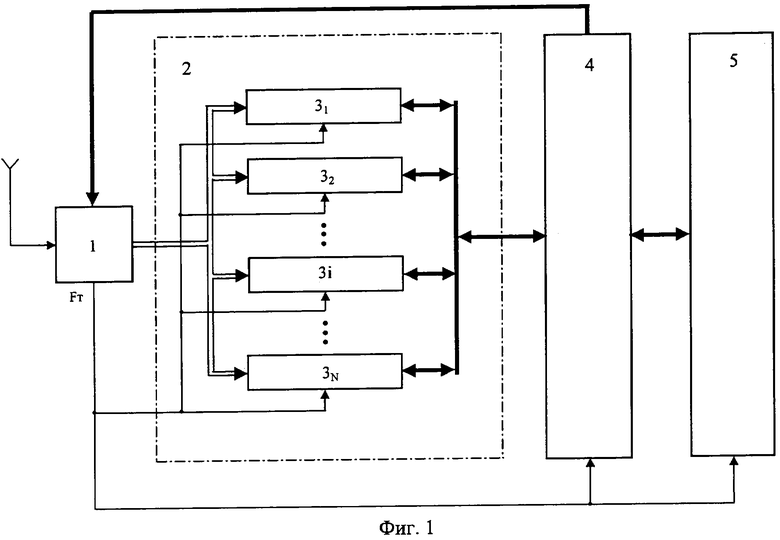
| БОЛДИН В.А, ЗУБИНСКИЙ В.И., ЗУРАБОВ Ю.Г | |||
| и др | |||
| Глобальная спутниковая радионавигационная система | |||
| - М.: ИПРЖР, 1998, с.74-78, рис.6.1, с.192-193 | |||
| УСТРОЙСТВО ДЛЯ ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2159448C1 |
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| Способ приготовления цветных чернил | 1926 |
|
SU9973A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ВЗРЫВА СКОПЛЕНИЙ ГАЗА | 1999 |
|
RU2155268C1 |
| US 4024383 A, 17.05.1977 | |||
| US 5552795 A, 03.09.1996 | |||
| 0 |
|
SU283302A1 | |
| Храповой механизм реверсивногодействия | 1972 |
|
SU508621A1 |

