Изобретение относится к области радиотехники, в частности к способу быстрого обнаружения сигналов спутников в условиях полной априорной неопределенности.
При запуске GPS приемника спустя длительное время после его отключения время до первого определения координат пользователя может достигать нескольких минут или даже десятков минут. Существует множество способов, которые направлены на сокращение времени первого определения координат пользователя, которые используют для этого различные алгоритмы. При этом большинство известных способов используют априорную информацию, которую предварительно надо откуда-то получить, что приводит к неавтономности приемника. К таким известным способам относятся, например, способы, описанные в патентах США №5663735 [1], 5854605 [2], 5798732 [3].
В этих патентах предусматривается ускорение определения координат пользователя за счет того, что известны данные о времени, которые получают извне или за счет встраиваемых в приемник часов.
Другие опубликованные технические решения предусматривают вычисление приблизительного текущего положения спутника за счет заранее известного альманаха или известных предыдущих значений эфемерид. К таким известным способам относится, например, изобретение по патенту США №6275185 [4].
Некоторые известные способы предлагают использовать информацию о приблизительном местоположении приемника, а также другую априорную информацию, ускоряющую старт, получаемую с помощью сетей мобильной связи или каких-либо иных сетей, например способы, описанные в патенте США №7215967 [5] или в патенте США №6813500 [6].
Наиболее близкими к заявляемому изобретению признаками обладает техническое решение, описанное в выложенной заявке на патент США №2007/0229351 [7]. Предмет изобретения, изложенный в этой заявке, заключается в следующем.
1. На принимающей стороне (в приемнике) инициализируют группу спутников, состоящую из L спутников, где L≥J, где J - любое целое число, подлежащих поиску, причем каждому спутнику в группе присвоен порядковый номер.
2. Предварительно формируют для каждого из L спутников совокупность весовых коэффициентов, характеризующих вероятность обнаружения спутников в ситуации, если обнаружен только один из L спутников, и задают число 1 - при обнаружении этого числа сигналов спутников поиск прекращается.
3. L спутникам присваивают текущие весовые коэффициенты с некоторыми начальными значениями, например нулевыми значениями.
4. Осуществляют поиск спутников, для чего:
- на начало поиска считают, что L спутников сформированы в логическую кандидатскую группу;
- последовательно выполняют поиск сигналов L спутников кандидатской группы, например, начиная с поиска сигнала спутника, имеющего наименьший порядковый номер, причем поиск каждого сигнала спутника выполняют только один раз;
- при обнаружении сигнала спутника, имеющего наименьший порядковый номер, устанавливают с ним соединение, принимают решение о том, что данный спутник присутствует, и убирают его из кандидатской группы;
- если сигнал спутника, имеющего наименьший порядковый номер, не обнаружен, то принимают решение о том, что данный спутник отсутствует, и убирают его из кандидатской группы;
- в соответствии с принятым решением изменяют текущие весовые коэффициенты для спутников;
- после каждого обновления текущих весовых коэффициентов осуществляют поиск сигнала спутника кандидатской группы, имеющего наибольший весовой коэффициент. По результатам поиска принимают решение о присутствии или отсутствии данного спутника, убирают его из кандидатской группы и обновляют весовые коэффициенты;
- поиск осуществляют до тех пор, пока обнаружат 1 спутников;
- если к концу последовательного поиска не обнаружат 1 спутников, то необнаруженные спутники переводят в кандидатскую группу и продолжают поиск их сигналов.
Осуществляют способ-прототип следующим образом.
Изначально приемник содержит в своей памяти группу из L спутников и заранее рассчитанные для них весовые коэффициенты. Весовые коэффициенты предполагают рассчитывать по следующему алгоритму.
Формируют для всех возможных пар i, j, i=1…L, j=1…L, функцию Xj|i(r,t) по закону: функция Xj|i(r,t) равна единице, если спутник с ID=j в момент t виден приемником, находящимся в точке r на поверхности Земли, и спутник с ID=i также виден этим приемником; равна нулю в противоположном случае.
На 24-часовом временном интервале выбирают с интервалом 15 минут 96 равноотстоящих точек, на поверхности Земли выбирают 1808 точек согласно WAAS IGP grid point definition.
Для фиксированных значений i и j для каждого из 96·1808 совместных значений координат и времени рассчитывают значение Xj|i(r,t), после чего все 96·1808 значений складываются, затем полученный результат нормируют на единицу.
Полученные числовые значения (для всех возможных пар i, j) обозначают E[Xj|i], и, в некотором смысле, их можно считать условными вероятностями обнаружения j-го спутника при условии обнаружения i-го спутника. После чего рассчитывают весовые коэффициенты Vj|i по формуле: Vj|i=2·E[Xj|i]-1.
Рассчитанные весовые коэффициенты Vj|i записывают в память приемника, и они не подлежат дальнейшему изменению, но их используют на протяжении всего срока службы приемника при расчете текущих весовых коэффициентов. Также в приемник записывают правило, по которому при старте приемника происходит расчет начальных значений текущих весовых коэффициентов Wk, k=1…L, и правило, по которому выбирают первый спутник, сигнал которого подлежит поиску.
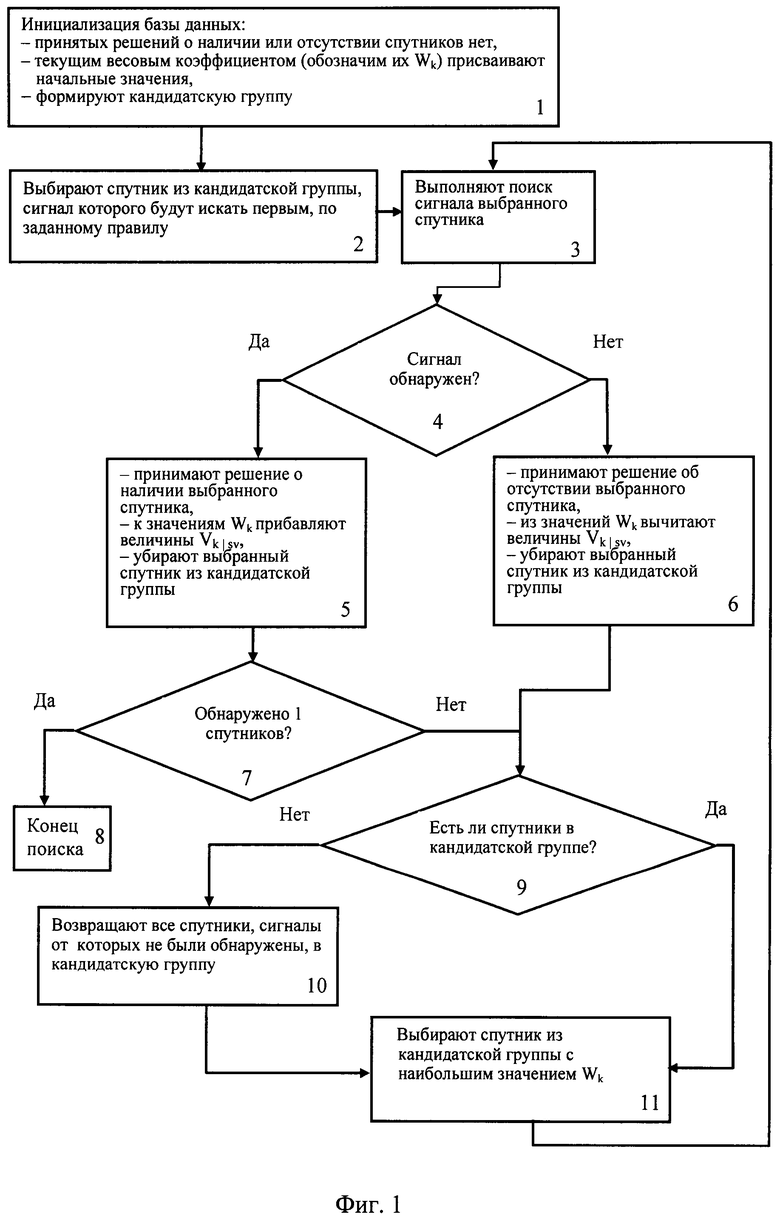
Располагая группой L спутников, весовыми коэффициентами для каждого из L спутников, правилом задания начальных значений текущих весовых коэффициентов и правилом выбора спутника, сигнал которого первым подлежит поиску, приемник начинает работу по следующему алгоритму (фиг.1):
- из L спутников формируют кандидатскую группу спутников с начальными значениями текущих весовых коэффициентов Wk, из которой выбирают спутник, сигнал которого первым подлежит поиску;
- осуществляют поиск сигнала выбранного спутника;
- при обнаружении сигнала спутник считают присутствующим, к значениям Wk прибавляют величины Vk|sv, где sv - выбранный спутник, и удаляют его из кандидатской группы;
- при необнаружении сигнала спутник считают отсутствующим, от значений Wk отнимают величины Vk|sv, где sv - выбранный спутник, и удаляют его из кандидатской группы;
- следующим из кандидатской группы выбирают спутник, имеющий наибольший текущий весовой коэффициент;
- повторяют последние четыре шага до тех пор, пока не обнаружат 1 спутников или пока в кандидатской группе не останется спутников;
- если в кандидатской группе не оказывается спутников, а число обнаруженных спутников меньше 1, все необнаруженные спутники возвращают в кандидатскую группу, выбирают из них имеющий наибольший весовой коэффициент и продолжают поиск.
К сожалению, описанный в прототипе [7] алгоритм не позволяет быстро определять первые координаты приемника пользователя в условиях полной априорной неопределенности потому, что:
- в реальных условиях сигнал спутника может быть не обнаружен, а спутник реально присутствует в зоне видимости приемника, и решение принимается неверно. Изменения текущих весовых коэффициентов, сделанные на основе таких неверных решений, приводят к последующим ошибкам и увеличению времени поиска сигналов спутников;
- поиск является относительно длительным, поскольку спутники, по которым приняты решения об их необнаружении, постоянно возвращают в кандидатскую группу по мере ее опустошения и начинают заново поиск сигналов этих спутников;
- способ-прототип не отслеживает динамику поиска, т.е. алгоритм не учитывает ситуацию, которая в реальных условиях довольно часто возникает, - это, например, когда обнаруженный спутник в процессе поиска уходит за горизонт и динамика изменяется, но принятое решение уже не изменяют, что также приводит к ошибкам.
Задача, на решение которой направлено изобретение, - снижение времени первого определения координат приемника пользователя, которое достигается за счет ускорения обнаружения сигналов спутников в условиях полной априорной неопределенности.
Технический результат достигнут за счет разработки усовершенствованного способа обнаружения сигналов спутников в условиях полной априорной неопределенности, который заключается в выполнении следующих операций:
- на принимающей стороне пользователя инициализируют группу спутников, состоящую из L спутников, где L≥J, где J - любое целое число, подлежащих поиску, причем каждому спутнику в группе присваивают порядковый номер;
- предварительно формируют для каждого из L спутников совокупность весовых коэффициентов;
- предварительно задают Q совокупностей параметров обнаружения, где Q≥1;
- задают начальные значения текущих весовых коэффициентов L спутников и выбирают первую из Q совокупностей параметров обнаружения;
- осуществляют поиск спутников в S этапов, где S≥1, для чего:
- формируют L спутников в логические группы: кандидатскую, активную и пассивную;
- перед первым этапом поиска считают, что все L спутников входят в кандидатскую группу, а активная и пассивная группы пока (в данный момент) не содержат спутников;
- на первом этапе выполняют последовательный поиск сигналов L спутников кандидатской группы, используя для этого значения текущих весовых коэффициентов в порядке их убывания, причем поиск каждого сигнала спутника выполняют один раз, при этом, если значения текущих весовых коэффициентов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания их порядковых номеров, и такой поиск выполняют вплоть до обнаружения сигнала одного из спутников;
- принимают решение о том, что спутник, сигнал которого обнаружен, присутствует, переводят его из кандидатской группы в активную группу и начинают обработку навигационного сигнала от данного спутника;
- в соответствии с принятым решением о наличии спутника изменяют текущие весовые коэффициенты для L-1 спутников кандидатской группы, сравнивают их с заданной величиной порога и по результатам сравнения принимают решение:
- переводят спутники из кандидатской группы в пассивную группу, чьи весовые коэффициенты не превысили заданную величину порога,
- оставляют спутники в кандидатской группе, чьи весовые коэффициенты превысили заданную величину порога;
- последовательно, в порядке убывания соответствующих им измененных текущих весовых коэффициентов, проводят поиск сигналов оставшихся непросмотренных спутников кандидатской группы;
- при каждом последующем обнаружении сигнала спутника, принимают решение о том, что данный спутник присутствует, и переводят его из кандидатской группы в активную группу, начинают обработку навигационного сигнала от данного спутника, изменяют текущие весовые коэффициенты для спутников кандидатской и пассивной групп в соответствии с не более чем N последними принятыми решениями, где L>N≥1, сравнивают текущие весовые коэффициенты с заданной величиной порога и по результатам сравнения принимают решение о переводе спутников из кандидатской группы в пассивную группу или оставляют в кандидатской группе, а также принимают решение о спутниках пассивной группы:
- переводят спутники из пассивной группы в активную, чьи весовые коэффициенты превысили заданную величину порога,
- оставляют спутники в пассивной группе, чьи весовые коэффициенты не превысили заданную величину порога,
- если обработка навигационного сигнала от обнаруженного спутника в силу каких-либо обстоятельств невозможна, то этот спутник переводят из активной в кандидатскую группу и из числа принятых решений убирают решение о том, что данный спутник присутствует, изменяют текущие весовые коэффициенты в соответствии с не более чем N последними принятыми решениями, где L>N≥1, при этом, если все принятые решения будут убраны, то текущим весовым коэффициентам спутников кандидатской группы присваивают их начальные значения:
- если сигнал спутника не обнаруживают, то решение об отсутствии спутника не принимают, текущие весовые коэффициенты не изменяют и спутник оставляют в кандидатской группе в режиме слежения;
- осуществляют поиск сигнала следующего спутника по его текущему весовому коэффициенту или в соответствии с порядковым номером, если текущие весовые коэффициенты непросмотренных спутников имеют одинаковые значения;
- поиск осуществляют до тех пор, пока в активной группе спутников окажется l спутников или в кандидатской группе не окажется спутников;
- в случае если к концу q-го этапа в активной группе спутников не окажется l спутников и при этом в кандидатской группе присутствуют спутники, то переходят к следующему, (q+1)-му этапу поиска, при этом, если q<Q, то изменяют совокупность параметров обнаружения на следующую совокупность;
- на каждом следующем этапе поиска вновь выполняют последовательный поиск сигналов спутников кандидатской группы, используя для этого значения измененных текущих весовых коэффициентов в порядке их убывания, причем поиск каждого сигнала спутника выполняют один раз, при этом, если значения текущих весовых коэффициентов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания их порядковых номеров;
- условия обновления текущих весовых коэффициентов и перемещения спутников между группами на всех этапах осуществляют таким же образом, как и на первом этапе.
При этом, например, весовые коэффициенты рассчитывают как условные вероятности обнаружения спутников в ситуации, когда обнаружено n из L спутников, где n≤N, L>N≥1, в предположении того, что все возможные координаты пользователя и моменты времени включения приемника равновероятны, или в предположении, что они имеют заданную совместную функцию распределения.
В качестве Q совокупностей параметров обнаружения используют, например, Q различных времен наблюдения сигнала и число 1 - максимальное число спутников, за которыми приемник может выполнять одновременное слежение.
Начальные значения текущих весовых коэффициентов L спутников задают, например, единичными.
Если обработка навигационного сигнала от обнаруженного спутника невозможна, например, с заданной вероятностью битовой ошибки, тогда этот спутник переводят из активной в кандидатскую группу и из числа принятых решений убирают решение о том, что данный спутник присутствует.
Сопоставительный анализ заявляемого изобретения с известным уровнем техники показывает, что заявляемый способ согласно изобретению имеет ряд существенных преимуществ, а именно:
- дополнительно формируют активную и пассивную группы спутников, что дает возможность быстро логически распределять спутники, сигналы которых обнаружены, в активную группу, в кандидатскую группу формировать спутники, сигналы которых подлежат поиску, в пассивную группу формировать спутники, вероятность обнаружения сигналов которых пренебрежимо мала (ниже заданного порога); правило, по которому логически распределяют спутники в группы, позволяет в реальных условиях отследить сигналы спутников в динамике;
- поиск проводят в S этапов, что позволяет на первом этапе быстро обнаружить сигналы спутников с большой мощностью, а на последующих этапах обнаружить сигналы оставшихся спутников, которые являются более слабыми; это также позволяет сократить время поиска сигналов спутников;
- каждый раз обновляются текущие весовые коэффициенты на каждом этапе поиска в соответствии только с истинными принятыми решениями относительно изменившегося расположения спутника, поэтому факт безуспешного поиска по причине слабого сигнала спутника (например, в условиях городской застройки) не приводит к ошибочному расчету текущих весовых коэффициентов.
Далее описание изобретения поясняется примерами выполнения и чертежами.
На фиг.1 выполнена структурная схема алгоритма способа-прототипа.
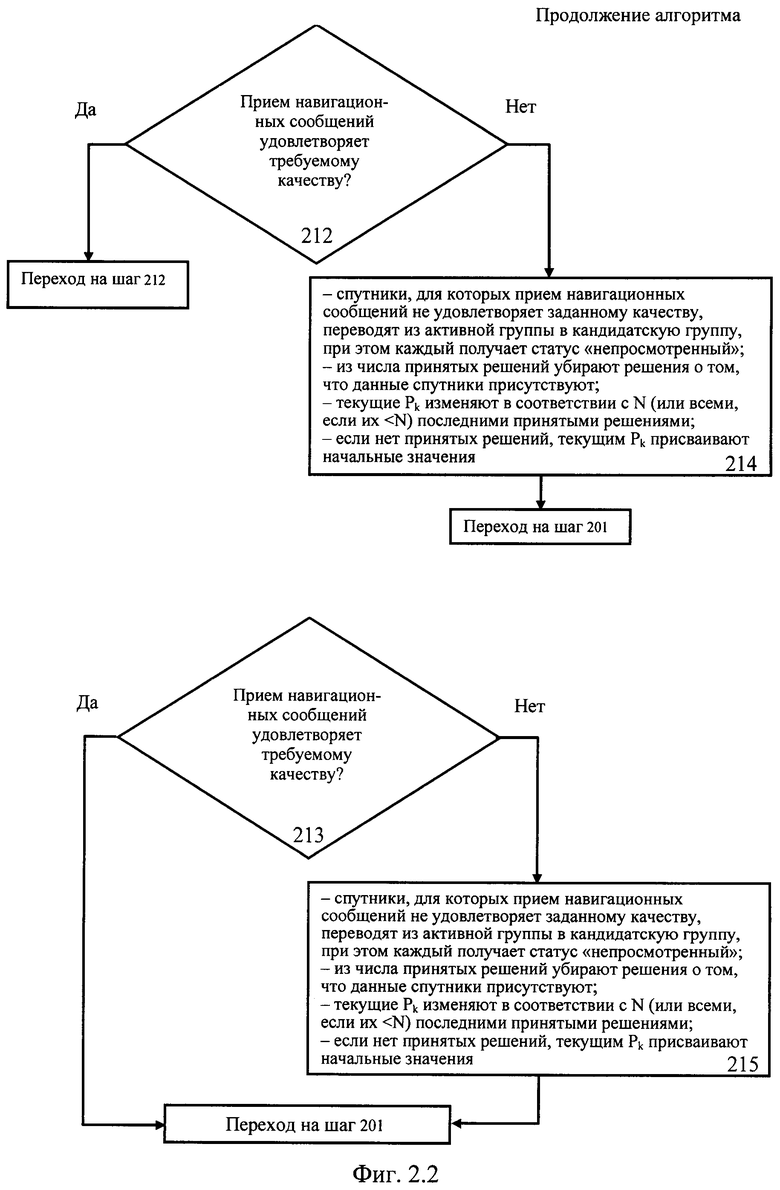
На фиг.2 - структурная схема алгоритма заявляемого способа обнаружения сигналов спутников в условиях полной априорной неопределенности.
Осуществляют заявляемый способ обнаружения сигналов спутников в условиях полной априорной неопределенности следующим образом.
Изначально в блок памяти приемника пользователя записывают информацию о группе из L спутников и присвоенные им порядковые номера, при этом подразумевается, что приемник содержит информацию о Q совокупностях параметров обнаружения, причем таких, что использование первой совокупности параметров обнаружения позволяет обнаружить только сильные по мощности сигналы, что потребует при поиске сигналов спутников наименьших затрат ресурсов приемника пользователя. Использование каждой следующей совокупности параметров обнаружения требует больших машинных мощностей, однако позволяет обнаруживать более слабые по мощности сигналы.
Также изначально приемник содержит информацию о совокупности весовых коэффициентов для каждого из L спутников. В одном из вариантов реализации приемника этими коэффициентами могут служить условные вероятности Р(i|k1…kn) обнаружения спутника с порядковым номером i в ситуации, когда обнаружено n из L спутников с порядковыми номерами k1…kn, рассчитанными для каждого i, где 1≤i≤L. Эти условные вероятности рассчитывают предварительно, расчеты ведут в предположении, что все возможные координаты пользователя (φ0, θ0) и моменты времени включения t приемника имеют заданную совместную функцию распределения f(t, φ0, θ0), или в предположении, что они равновероятны. Для расчета Р(i|k1..kn) предварительно формируют функцию Х(i, φ0, θ0, t), равную единице, если спутник с ID=i в момент времени t виден приемником, находящимся в точке на поверхности Земли, характеризуемой угловыми координатами (φ0, θ0), и равную нулю в противоположном случае. Вероятности P(i|k1…kn) в этом случае рассчитывают по формуле:

Рассчитанные весовые коэффициенты вносят в память приемника, и не подлежат дальнейшему изменению, но используют на протяжении всего срока службы приемника при расчете текущих весовых коэффициентов. Также в приемник записывают алгоритм, по которому происходит расчет начальных значений текущих весовых коэффициентов при старте приемника. Алгоритм, например, может быть следующий: задают все начальные значения текущих весовых коэффициентов единичными.
Располагая группой L спутников, совокупностями предварительно рассчитанных весовых коэффициентов для каждого из L спутников, алгоритмом задания начальных значений текущих весовых коэффициентов и Q совокупностями параметров обнаружения, поиск спутников осуществляют (см. фиг.2) в S этапов, где S≥1, для чего:
- формируют логические группы спутников: кандидатскую, активную и пассивную группы;
- перед первым этапом поиска считают, что все L спутников входят в кандидатскую группу, а активная и пассивная группы не содержат спутников;
- на первом этапе используют первую из Q совокупностей параметров обнаружения, позволяющую быстро обнаруживать сильные по мощности сигналы, и начинают с поиска сигнала спутника кандидатской группы, имеющего наибольшее значение текущего весового коэффициента, а если все коэффициенты равны - то с поиска сигнала спутника с наименьшим порядковым номером;
- предпринимают поиск сигнала выбранного спутника;
- если сигнал выбранного спутника обнаруживают, спутнику присваивают статус «просмотренный» и переводят его из кандидатской группы в активную, принимают решение о том, что спутник присутствует, и обновляют текущие весовые коэффициенты по следующему правилу: текущим весовым коэффициентам присваивают значения условных вероятностей обнаружения спутников при условии, соответствующем результатам N последних принятых решений (или результатам всех принятых решений, если их число меньше N). Если при этом какие-либо из текущих весовых коэффициентов спутников кандидатской группы не превышают заранее заданный порог, их переводят в пассивную группу;
- после каждого обнаружения сигнала проверяют, достигло ли количество обнаруженных спутников значения 1 и есть ли спутники в кандидатской группе - если одно из этих условий выполняется, поиск останавливают и переходят в состояние слежения за обнаруженными сигналами, иначе - продолжают поиск;
- если сигнал спутника не обнаруживают, то текущие весовые коэффициенты не обновляют, спутнику присваивают статус «просмотренный» и оставляют в кандидатской группе;
- среди спутников кандидатской группы, не имеющих статус «просмотренный», выбирают спутник, имеющий наибольшее значение текущего весового коэффициента, а если все коэффициенты равны, то имеющий наименьший порядковый номер;
- повторяют последние пять шагов до тех пор, пока либо не перейдут в состояние слежения, либо все спутники в кандидатской группе не получат статус «просмотренный». При этом после второго и последующих обнаружений сигнала спутника после обновления текущих весовых коэффициентов проверяют также, если их значения для спутников пассивной группы превысили заданный порог - в этом случае эти спутники переводят из пассивной группы в кандидатскую группу. Также перед каждой следующей процедурой поиска проверяют качество приема обнаруженных сигналов (если таковые имеются) и, если оно не удовлетворяет заданным требованиям, соответствующий спутник переводят из активной группы в кандидатскую и отменяют решение о его присутствии и в соответствие с измененными решениями обновляют текущие весовые коэффициенты;
- если в кандидатской группе все спутники имеют статус «просмотренный» и при этом не обнаружено l сигналов, алгоритм переходит к следующему этапу;
- на следующем этапе выбирается следующая совокупность параметров обнаружения, со всех спутников снимается статус «просмотренный» и вновь осуществляется поиск сигналов спутников кандидатской группы;
- если выбрана последняя совокупность параметров обнаружения, то при переходе на следующий этап используется она же.
Осуществляется заявляемое изобретение посредством известных устройств - это, например, спутники навигационных систем NAVSTAR, ГЛОНАСС или GALILEO, являющиеся источником навигационного сигнала, и устройства приема и обработки навигационных сигналов, установленные на подвижных и стационарных объектах.
Заявляемый способ имеет ряд существенных преимуществ по сравнению с аналогами. Эти преимущества заключаются в следующем.
- Дополнительно формируют активную и пассивную группы спутников, что дает возможность быстро логически распределять спутники, сигналы которых обнаружены, в активную группу, в кандидатскую группу формировать спутники, сигналы которых подлежат поиску, в пассивную группу формировать спутники, вероятность обнаружения сигналов которых пренебрежительно мала (ниже заданного порога). Правило, по которому логически распределяют спутники в группы, позволяет в реальных условиях отследить сигналы спутников в динамике.
- Поиск проводят в S этапов, что позволяет на первом этапе быстро обнаружить сигналы спутников с большой мощностью, а на последующих этапах обнаружить сигналы оставшихся спутников, которые являются более слабыми. Это также позволяет сократить время поиска сигналов спутников.
- Каждый раз обновляются текущие весовые коэффициенты на каждом этапе поиска в соответствии только с истинными принятыми решениями относительно изменившегося расположения спутника, поэтому факт безуспешного поиска по причине слабого сигнала спутника (например, в условиях городской застройки) не приводит к ошибочному расчету текущих весовых коэффициентов.
Заявленное изобретение относится к быстрому обнаружению сигналов спутников в условиях полной априорной неопределенности. Достигаемый технический результат - снижение времени первого определения координат приемника пользователя. Указанный результат достигается за счет того, что дополнительно формируют активную и пассивную группы спутников, что дает возможность быстро логически распределять спутники, сигналы которых обнаружены, в активную группу, в кандидатскую группу формировать спутники, сигналы которых подлежат поиску, в пассивную группу формировать спутники, вероятность обнаружения сигналов которых пренебрежительно мала (ниже заданного порога); правило, по которому логически распределяют спутники в группы, позволяет в реальных условиях отследить сигналы спутников в динамике; поиск проводят в S этапов, что позволяет на первом этапе быстро обнаружить сигналы спутников с большой мощностью, а на последующих этапах обнаружить сигналы оставшихся спутников, которые являются более слабыми, что также позволяет сократить время поиска сигналов спутников; каждый раз обновляются текущие весовые коэффициенты на каждом этапе поиска в соответствии только с истинными принятыми решениями относительно изменившегося расположения спутника, поэтому факт безуспешного поиска по причине слабого сигнала спутника (например, в условиях городской застройки) не приводит к ошибочному расчету текущих весовых коэффициентов. 4 з.п. ф-лы, 2 ил.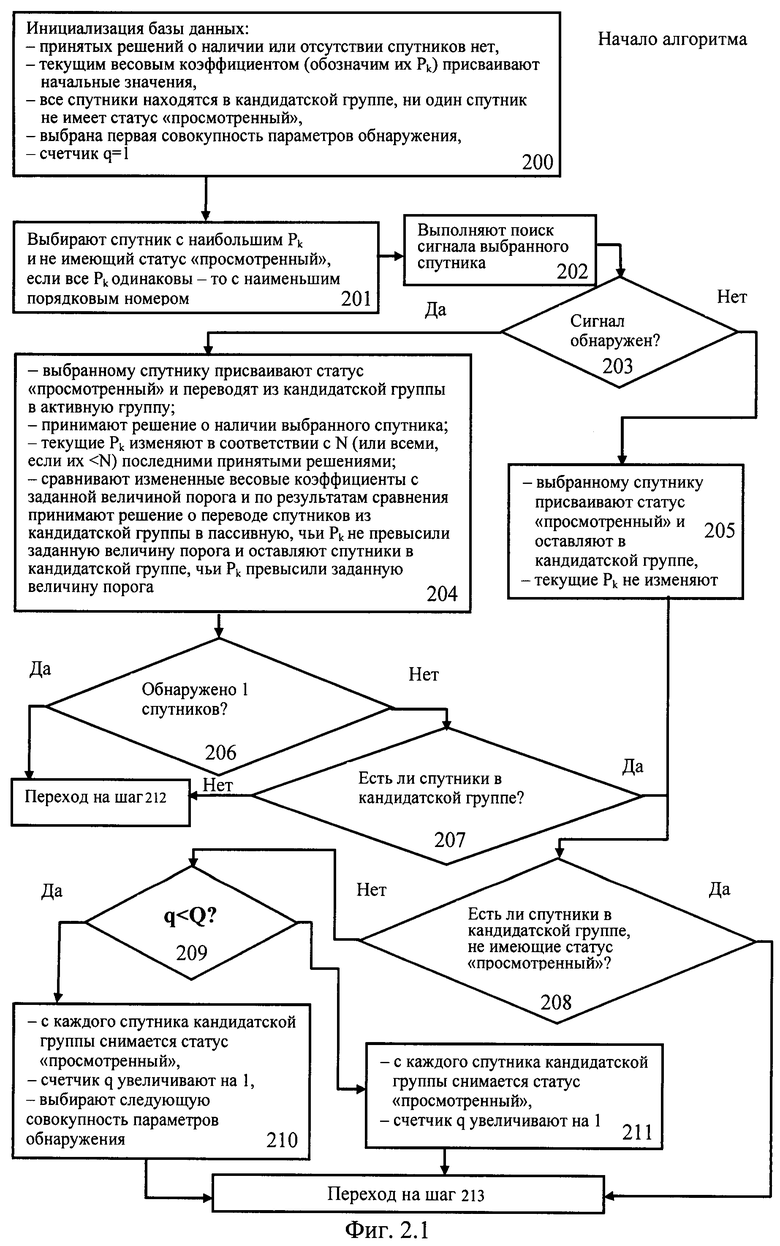
1. Способ обнаружения сигналов спутников в условиях полной априорной неопределенности, предусматривающий выполнение следующих операций:
на принимающей стороне пользователя инициализируют группу спутников, состоящую из L спутников, где L≥J, где J - любое целое число, подлежащих поиску, причем каждому спутнику в группе присваивают порядковый номер, предварительно формируют для каждого из L спутников совокупность весовых коэффициентов, предварительно задают Q совокупностей параметров обнаружения, где Q≥1, задают начальные значения текущих весовых коэффициентов L спутников и выбирают первую из Q совокупностей параметров обнаружения, осуществляют поиск спутников в S этапов, где S≥1, для чего формируют L спутников в логические группы: кандидатскую, активную и пассивную, перед первым этапом поиска считают, что все L спутников входят в кандидатскую группу, а активная и пассивная группы в данный момент не содержат спутников, на первом этапе выполняют последовательный поиск сигналов L спутников кандидатской группы, используя для этого значения текущих весовых коэффициентов в порядке их убывания, причем поиск каждого сигнала спутника выполняют один раз, при этом если значения текущих весовых коэффициентов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания их порядковых номеров, поиск выполняют вплоть до обнаружения сигнала одного из спутников, принимают решение о том, что спутник, сигнал которого обнаружен, присутствует, переводят его из кандидатской группы в активную группу и начинают обработку навигационного сигнала от данного спутника, в соответствии с принятым решением о наличии спутника изменяют текущие весовые коэффициенты для L-1 спутников кандидатской группы, сравнивают их с заданной величиной порога и по результатам сравнения принимают решение о переводе из кандидатской группы в пассивную группу тех спутников, чьи весовые коэффициенты не превысили заданную величину порога, при этом оставляют в кандидатской группе те спутники, чьи весовые коэффициенты превысили заданную величину порога, последовательно, в порядке убывания соответствующих им измененных текущих весовых коэффициентов, проводят поиск сигналов оставшихся непросмотренных спутников кандидатской группы, при каждом последующем обнаружении сигнала спутника принимают решение о том, что данный спутник присутствует и переводят его из кандидатской группы в активную группу, начинают обработку навигационного сигнала от данного спутника, изменяют текущие весовые коэффициенты для спутников кандидатской и пассивной групп в соответствии с не более чем N последними принятыми решениями, где L>N≥1, сравнивают измененные текущие весовые коэффициенты с заданной величиной порога и по результатам сравнения принимают решение о переводе из кандидатской группы в пассивную группу тех спутников, чьи весовые коэффициенты превысили заданную величину порога, или оставляют в кандидатской группе, а также принимают решение о спутниках пассивной группы путем перевода из пассивной группы в активную тех спутников, чьи весовые коэффициенты превысили заданную величину порога, при этом оставляют в пассивной группе те спутники, чьи весовые коэффициенты не превысили заданную величину порога, если обработка навигационного сигнала от обнаруженного спутника в силу каких-либо обстоятельств невозможна, то этот спутник переводят из активной в кандидатскую группу и из числа принятых решений убирают решение о том, что данный спутник присутствует, изменяют текущие весовые коэффициенты в соответствии с не более чем N последними принятыми решениями, где L>N≥1, при этом если все принятые решения будут убраны, то измененным текущим весовым коэффициентам спутников кандидатской группы присваивают их начальные значения, если сигнал спутника не обнаруживают, то решение об отсутствии спутника не принимают, текущие весовые коэффициенты не изменяют и спутник оставляют в кандидатской группе в режиме слежения, осуществляют поиск сигнала следующего спутника по его текущему весовому коэффициенту или в соответствии с порядковым номером, если текущие весовые коэффициенты непросмотренных спутников имеют одинаковые значения, поиск осуществляют до тех пор, пока в активной группе спутников окажется l спутников, где l - максимальное число спутников, за которыми на принимающей стороне пользователя выполняют одновременное слежение, или в кандидатской группе не окажется спутников, в случае, если к концу q-го этапа в активной группе спутников не окажется l спутников, и при этом в кандидатской группе присутствуют спутники, то переходят к следующему этапу поиска, изменяют совокупность параметров обнаружения Q на следующую совокупность, на каждом следующем этапе поиска вновь выполняют последовательный поиск сигналов спутников кандидатской группы, используя для этого значения измененных текущих весовых коэффициентов в порядке их убывания, причем поиск каждого сигнала спутника выполняют один раз, при этом если значения текущих весовых коэффициентов спутников оказываются одинаковыми, то поиск выполняют в порядке возрастания их порядковых номеров, условия обновления текущих весовых коэффициентов и перемещения спутников между группами на всех этапах осуществляют таким же образом, как и на первом этапе.
2. Способ по п.1, отличающийся тем, что весовые коэффициенты рассчитывают, как условные вероятности обнаружения спутников в ситуации, когда обнаружено n из L спутников, где n≤N, L>N≥1, в предположении того, что все возможные координаты пользователя и моменты времени включения приемника равновероятны, или в предположении, что они имеют заданную совместную функцию распределения.
3. Способ по п.1, отличающийся тем, что в качестве Q совокупностей параметров обнаружения используют Q различных времен наблюдения сигнала.
4. Способ по п.1, отличающийся тем, что начальные значения текущих весовых коэффициентов L спутников задают единичными.
5. Способ по п.1, отличающийся тем, что спутник переводят из активной в кандидатскую группу, и из числа принятых решений убирают решение о том, что данный спутник присутствует, если обработка навигационного сигнала от обнаруженного спутника невозможна с заданной вероятностью битовой ошибки.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ ПОИСКА СИГНАЛОВ СПУТНИКОВ В МНОГОКАНАЛЬНОМ ПРИЕМНИКЕ СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2006 |
|
RU2318221C1 |
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ПО ПСЕВДОДАЛЬНОСТИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ (ГСП) | 2000 |
|
RU2253127C2 |
| RU 2006130799 A, 20.03.2008 | |||
| US 6018312 A, 25.01.2000 | |||
| US 6873910 B2, 29.03.2005 | |||
| US 2006152409 A1, 13.07.2006. | |||

