Изобретение относится к системам управления силовыми газотурбинными установками транспортных средств, преимущественно авиационных газотурбинных двигателей.
В общем случае управление режимом работы авиационного газотурбинного двигателя осуществляется перемещением рычага управления, расположенного в кабине экипажа. При этом на основе информации о положении рычага управления двигателем система автоматического управления газотурбинного двигателя изменяет расход топлива в камеру сгорания, положение створок реверсивного устройства и иных органов управления, что обеспечивает заданный уровень тяги газотурбинного двигателя (ГТД). Таким образом, обеспечение надежной и точной работы системы задания режима ГТД является важнейшей составляющей безаварийной эксплуатации ГТД и безопасности полета в целом.
Известна электродистанционная система управления режимом авиационного ГТД, включающая рычаг управления двигателем (РУД), датчик угла поворота РУД αРУД, электромеханический привод, обеспечивающие изменение положения задатчика режима на топливном насосе-регуляторе [Патент РФ №2174702, G05G 11/00].
Однако данная система имеет недостаточно высокий уровень надежности из-за возможных отказов датчика αРУД, неисправностей элементов электромеханического привода (электродвигателя, редуктора или электропроводки). Кроме того, при возможных сбоях в бортовом электропитании (115 В/400 Гц; 27 В) электродистанционная система становится неработоспособной.
Известна система управления режимом авиационного ГТД, включающая РУД, датчик αРУД (синусно-косинусный вращающийся трансформатор), размещенный непосредственно на рычаге управления двигателем, электронный регулятор, который в зависимости от выходного сигнала датчика αРУД формирует управляющее воздействие для обеспечения заданного уровня тяги [Electronic engine control system. PW 2000. Series engine, PWA 5741A, 1983, p.80].
Основным недостатком данного аналога является возможный отказ электронной системы управления двигателем в случае неисправности датчика положения РУД или дефектов в самолетной электропроводке этого датчика (обрыв/короткое замыкание). Кроме того, в случае значительного расстояния между кабиной экипажа и ГТД актуальной становится проблема точности и электромагнитной помехозащищенности канала измерения αРУД, что вызывает затруднение поиска дефектов в электропроводке.
Необходимо отметить, что для современных и перспективных типов авиационных ГТД, оснащенных цифровыми электронными системами управления с полной ответственностью (типа FADEC), вышеупомянутые отказы канала измерения αРУД приводят к необходимости выключения двигателя, что снижает эксплуатационную безопасность полета.
Наиболее близкой к заявляемой по конструкции является система управления двигателем летательного аппарата [Патент РФ №1707896, B64D 31/04].
Система управления ГТД содержит вычислительную систему управления тяги, электронный регулятор и топливный насос-регулятор ГТД, а также кинематически соединенные между собой исполнительный механизм автомата тяги, электрическое командное устройство, включающее синусно-косинусный вращающийся трансформатор для измерения параметра αРУД, РУД, механическая тросовая система, при этом выходной сигнал с синусно-косинусного трансформатора поступает в электронный регулятор, который формирует управляющее воздействие в топливный насос-регулятор для поддержания требуемого уровня тяги ГТД.
Предусмотрено автоматическое задание режима через автомат тяги по воздействию из вычислительной системы управления тягой ВСУТ и ручное задание режима работы ГТД, которое осуществляется летчиком через механическую тросовую связь, включающую тросовую проводку, тяги, рычаги, шарнирно-рычажную передачу и ролики.
Недостатком прототипа является пониженная надежность системы при отказе канала измерения РУД электрического командного устройства, что приводит к низкой эксплуатационной технологичности, например, при поиске дефектов в самолетной электропроводке канала измерения αРУД.
Техническая задача заключается в повышении надежности системы за счет введения дополнительного информационного канала о режимах полета самолета, функционирующего при отказе датчика положения рычага управления двигателем.
Сущность изобретения заключается в том, что система управления тягой газотурбинного двигателя самолета, включающая вычислительный модуль управления тягой, электронный регулятор, топливный насос-регулятор, тросовый механизм, а также кинематически связанные между собой рычаг управления двигателем (РУД), исполнительный механизм автомата тяги и датчик положения РУД, согласно изобретению дополнительно включает блок передачи данных об этапе полета самолета, связанный с вычислительным модулем управления тягой, а электронный регулятор содержит ключ-коммутатор, а также блок выявления отказа датчика положения РУД и выполнен с возможностью формирования управляющего воздействия на топливный насос-регулятор с учетом данных об этапе полета самолета при отказе датчика положения РУД.
Электронный регулятор выполнен в виде электронной цифровой вычислительной машины с основным и дополнительным каналами и размещением на двигателе самолета.
Данными о этапах полета служат по меньшей мере сигналы «Взлет», «Набор высоты», «Крейсерский режим работы».
На чертеже представлена структурная схема заявляемой системы управления тягой газотурбинного двигателя самолета.
1 - вычислительный модуль управления тягой;
2 - электронный регулятор управления, представляющий собой специализированную электронную цифровую вычислительную машину, оснащенную устройствами сопряжения с датчиками, сигнализаторами, исполнительными элементами и системами;
3 - программный блок, осуществляющий управляющее воздействие в случае отказа датчика положения рычага управления двигателем (РУД);
4 - топливный насос-регулятор, обеспечивающий изменение расхода топлива в камеру сгорания (не показана) ГТД по управляющему сигналу, поступающему с программного блока 3. В случае отказа электронного регулятора 2 обеспечивает резервное (гидромеханическое) управление подачей топлива в камеру сгорания ГТД;
5 - рычаг управления двигателем (РУД);
6 - исполнительный механизм автомата тяги;
7 - тросовый механизм, включающий тросовую проводку, тяги, рычаги, ролики, необходимые для обеспечения кинематической связи исполнительного механизма 6 автомата тяги с РУД 5, а также РУД 5 с датчиком положения РУД (αРУД);
8 - датчик положения αРУД. Наиболее предпочтительным вариантом конструкции датчика 8 является датчик угла поворота типа ДБСКТ-220-1 (дублированный бесконтактный, синусо-косинусный вращающийся трансформатор);
9 - электрические линии связи;
10 - блок передачи данных об этапе полета самолета. При использовании заявляемой системы в конструкции авиационного двухконтурного двигателя ПС-90А2 (модификация двухконтурного двигателя ПС-90А самолетов ТУ-204, ТУ-214 и Ил-96-300) данными об этапах полета служат: «Взлет», «Набор высоты», «Крейсерский режим работы» и др. Передача данных в электронный регулятор 2 осуществляется в виде электронной кодовой информации по ГОСТ 18977-79;
11 - блок выявления отказа датчика 8 αРУД. Является элементом электронного регулятора 2. При выявлении отказа одного из каналов датчика ДБСКТ-220-1, например, с помощью допускового контроля система встроенного контроля электронного регулятора 2 осуществляется отключение неисправного и подключение исправного канала датчика 8 αРУД. В случае выявления полного (двойного) отказа датчика 8 αРУД на выходе блока 11 выявления отказа датчика 8 αРУД формируется логический сигнал I1;
12 - ключ-коммутатор. Является элементом электронного регулятора 2. В качестве управляемого входа ключа используется выходной сигнал I1 с блока 11. При наличии сигнала I1 обеспечивается разрешение на использование в программе регулирования тяги (программный блок 3) информации, передаваемой из модуля 1 в электронный регулятор 2.
Система работает следующим образом.
В случае автоматического режима задания тяги ГТД при подаче управляющего сигнала с модуля 1 исполнительный механизм 6 автомата тяги через тросовый механизм 7 поворачивает РУД 5. Также от РУД 5 через тросовый механизм 7 обеспечивается поворот валика датчика измерения 8 угла поворота РУД 5. Электрический сигнал с выхода датчика 8 поступает в электронный регулятор 2, что обеспечивает измерение αРУД. Электронный регулятор 2 формирует управляющее воздействие в топливный насос-регулятор 4, изменяя расход топлива в камеру сгорания, что обеспечивает заданный с модуля 1 необходимый уровень тяги ГТД.
В случае отказа одного из каналов датчика αРУД 8 типа ДБСКТ-220-1 блок выявления отказа 11 выявляет данную неисправность, при этом осуществляется отключение неисправного канала и подключение исправного канала датчика 8 αРУД. Работа по автоматическому режиму задания тяги ГТД осуществляется без каких-либо ограничений, изложенных выше.
В случае полного (двойного) отказа датчика 8 αРУД на выходе блока 11 формируется логический сигнал I1, который поступает на вход ключа-коммутатора 12. Ключ-коммутатор 12 замыкается, и тем самым обеспечивается передача и использование в программе управления тяги информации (блок 3), передаваемой по электрической линии связи 9 из модуля 1 в электронный регулятор 2. При наличии сигнала «Взлет» электронный регулятор обеспечивает максимальный режим ГТД, при наличии сигнала «Набор высоты» - номинальный режим ГТД, а при наличии сигнала «Крейсерский режим полета» - крейсерский режим работы.
При двойном отказе датчика 8 αРУД такая же логика работы (задание режима тяги с модуля 1) сохраняется и в случае обрыва тросовой системы 7. Тем самым обеспечивается троекратное резервирование системы задания режима при работе электронной системы управления.
В случае ручного режима задания тяги ГТД в штатной ситуации (отсутствие отказов) при перемещении летчиком РУД 5 через тросовый механизм 7 обеспечивается измерение угла αРУД поворота РУД 5 с помощью датчика 8, и аналогично вышеописанному электронный регулятор 2 формирует управляющее воздействие в топливный насос-регулятор 4, обеспечивая заданный летчиком уровень тяги ГТД.
В случае отказа одного из каналов датчика 8 ручное управление двигателем также осуществляется без каких-либо ограничений.
При этом в случае двойного отказа датчика 8 αРУД или полном отказе электронного регулятора 2 управляемость ГТД сохраняется и обеспечивается резервным (гидромеханическим) управлением от насоса-регулятора 4 через тросовый механизм 7.
Надежность и работоспособность заявляемого устройства были проверены расчетным моделированием и стендовыми испытаниями в составе турбореактивного двухконтурного двигателя ПС-90А2, оснащенным электронным регулятором РЭД-90 (типа FADEC) и датчиком поворота ДБСКТ-220-1. Электронный регулятор РЭД-90, в котором для обеспечения современных и перспективных норм надежности имеются два независимых, идентичных по функциям и структуре канала управления (основной и дублирующий), с заданным быстродействием обеспечил оперативное выявление специально задаваемых отказов ДБСКТ-220-1 и формирование управляющего воздействия в топливный насос-регулятор на основе кодовой информации об этапах полета по ГОСТ 18977-79 (биполярный последовательный код, скорость передачи - 100 кбод/с).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЯГОЙ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2009 |
|
RU2406849C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU1707896C |
| Способ управления газотурбинным двигателем при самопроизвольном открытии реверсивного устройства | 2021 |
|
RU2774010C1 |
| Способ управления авиационным газотурбинным двигателем на взлетном режиме при пожаре | 2015 |
|
RU2618171C1 |
| Способ управления перепуском воздуха из компрессора низкого давления турбореактивного двухвального двигателя с высокой степенью двухконтурности | 2024 |
|
RU2836207C1 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2468229C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2019 |
|
RU2726491C1 |
| СПОСОБ КОНТРОЛЯ ТЕПЛОВОГО СОСТОЯНИЯ ЭЛЕКТРОННОГО РЕГУЛЯТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2817575C1 |
| Способ и устройство управления реверсированием тяги газотурбинного двигателя самолёта | 2024 |
|
RU2828300C1 |
Изобретение относится к системам управления силовыми газотурбинными установками. Система управления тягой газотурбинного двигателя самолета включает в себя вычислительный модуль (1) управления тягой, электронный регулятор (2), топливный насос-регулятор (4), тросовый механизм (7), а также кинематически связанные между собой рычаг управления двигателем (РУД) (5), исполнительный механизм (6) автомата тяги и датчик (8) положения αРУД, блок (10) передачи данных об этапе полета самолета, связанный с вычислительным модулем (1) управления тягой. Электронный регулятор (2) выполнен в виде электронной цифровой вычислительной машины с основным и дополнительным каналами и размещением на двигателе самолета, содержит ключ-коммутатор (12) и блок (11) выявления отказа датчика (8) положения αРУД, формирует управляющее воздействие на топливный насос-регулятор с учетом данных об этапе полета самолета. Данными об этапах полета служат сигналы «Взлет», «Набор высоты», «Крейсерский режим работы». Достигается надежность и работоспособность системы управления тягой газотурбинного двигателя. 2 з.п. ф-лы, 1 ил.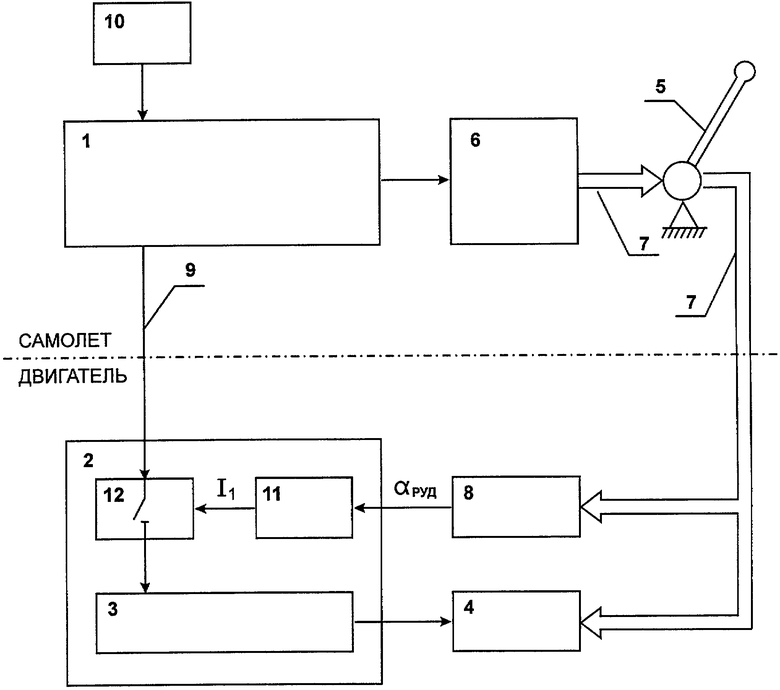
1. Система управления тягой газотурбинного двигателя самолета, включающая вычислительный модуль управления тягой, электронный регулятор, топливный насос-регулятор, тросовый механизм, а также кинематически связанные между собой рычаг управления двигателем (РУД), исполнительный механизм автомата тяги и датчик положения αРУД, отличающаяся тем, что она дополнительно включает блок передачи данных об этапе полета самолета, связанный с вычислительным модулем управления тягой, а электронный регулятор содержит ключ-коммутатор, а также блок выявления отказа датчика положения αРУД, и выполнен с возможностью формирования управляющего воздействия на топливный насос-регулятор с учетом данных об этапе полета самолета при отказе датчика положения αРУД.
2. Система по п.1, отличающаяся тем, что электронный регулятор выполнен в виде электронной цифровой вычислительной машины с основным и дополнительным каналами и размещением на двигателе самолета.
3. Система по п.1, отличающаяся тем, что данными о этапах полета служат по меньшей мере сигналы «Взлет», «Набор высоты», «Крейсерский режим работы».
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU1707896C |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1642812A1 |
| Электромагнитный сепаратор | 1949 |
|
SU80510A1 |
| SU 1625095 A1, 15.06,1994 | |||
| US 2006010972 A1, 19.01.2006. | |||

