Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления газотурбинными двигателями (ГТД).
Известен способ контроля топливной системы ГТД, заключающийся в том, что после каждого полета и перед каждым вылетом контролируют отсутствие подтекания топлива и масла (И.В.Кеба «Летная эксплуатация вертолетных ГТД», М.: «Транспорт», 1976 г., с.96-97).
Недостатком известного способа является его низкая эффективность с точки зрения обнаружения зарождающихся дефектов в топливной системе ГТД.
Наиболее близким к данному изобретению по технической сущности является способ контроля электронно-гидромеханической системы управления ГТД, заключающийся в том, что контролируют работоспособность электронного регулятора (ЭР) и при его отказе переводят управление ГТД на резервный гидромеханический регулятор (ГМР) (В.И. Васильев «Автоматический контроль и диагностика систем управления силовыми установками летательных аппаратов», М.: «Машиностроение», 1989 г., с.23-27).
Недостатком этого способа является следующее.
Система встроенного контроля (СВК) ЭР обеспечивает не 100% контроль состояния элементов САУ. У современных САУ, например двигателей ТВ3-117 ВМА-СБМ1 или ПС-90А2, коэффициент полноты контроля составляет 0,995.
Это может привести к тому, что при незафиксированном отказе ЭР в полете возникнет аварийная ситуация.
Это приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности самолета.
Целью изобретения является повышение качества контроля системы управления ГТД и, как следствие, повышение надежности ГТД и безопасности самолета.
Поставленная цель достигается тем, что в способе контроля электронно-гидромеханической системы управления ГТД, заключающемся в том, что контролируют работоспособность ЭР и при его отказе переводят управление ГТД на ГМР, дополнительно на взлете самолета при исправном ЭР по измеренным положению рычага управления двигателем, температуре и давлению воздуха на входе в двигатель, давлению воздуха за компрессором, температуре газов за турбиной и частоте вращения ротора двигателя по известным зависимостям определяют заданный расход топлива в камеру сгорания (КС) двигателя, по измеренному положению дозатора топлива и первой заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют текущий расход топлива в КС двигателя, по измеренным положению РУД и давлению воздуха на входе в двигатель и второй заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют минимально допустимый расход топлива в КС для текущего режима работы двигателя и высоты полета самолета, сравнивают текущий расход топлива и минимально допустимый, если текущий расход топлива больше минимально допустимого, сравнивают заданный расход топлива и минимально допустимый, если заданный расход топлива становится меньше минимально допустимого, блокируют изменение текущего расхода топлива в течение наперед заданного времени, определяемого расчетно-экспериментальным путем, если по истечении этого времени заданный расход топлива не стал больше минимально допустимого, переводят управления двигателем на ГМР, формируют сигнал «Управление двигателем от ГМР» и подают его на табло в кабине пилота.
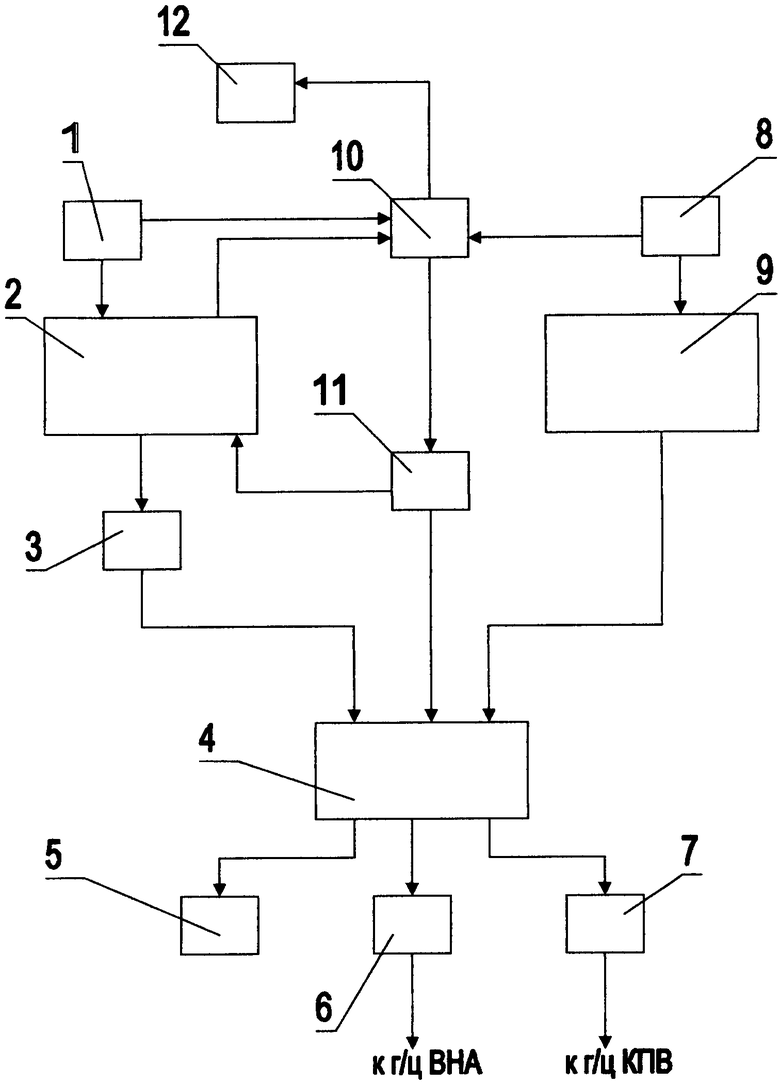
На фигуре представлена схема устройства, реализующая заявляемый способ.
Устройство содержит последовательно соединенные блок 1 датчиков (БД), ЭР 2, блок 3 исполнительных механизмов, селектор 4 «электроника - гидромеханика», дозатор 5, к селектору 4 подключены распределительные золотники (РЗ) 6 и 7, управляющие положением гидроцилиндров привода входного направляющего аппарата компрессора (ВНА) и клапанов перепуска воздуха из-за компрессора (КПВ) соответственно, второй БД 8, подключенный к ГМР 9, выход которого подключен к селектору 4, блок 10 контроля, входы которого подключены к выходам блоков 1 и 8 и ЭР 2, первый выход - через электромагнит (ЭМ) 11 - к селектору 4, второй выход - к табло 12 «Управление двигателем от ГМР», третий выход - к ЭР 2.
Устройство работает следующим образом.
ЭР 2 по информации из блока 1 по известным зависимостям (см., например, Шевяков А.А. «Теория автоматического управления силовыми установками летательных аппаратов», М.: «Машиностроение», 1976 г., с 123-144) формирует воздействия для управления дозатором 5 и золотниками 6 и 7.
То же самое делает ГМР 9 по информации из блока 8.
Блок 10 по информации, получаемой из блока 1 и ЭР 2 известными способами (см., например, В.И. Васильев «Автоматический контроль и диагностика систем управления силовыми установками летательных аппаратов», М.: «Машиностроение», 1989 г., с.23-27) контролирует работоспособность ЭР 2.
При исправном ЭР 2 блок 10 формирует сигнал на ЭМ 11, ЭМ 11 переводит селектор 4 в положение «электроника». При этом положении селектора 4 к дозатору 5 и РЗ 6 и 7 подается управляющее воздействие от ЭР 2.
При отказе ЭР 2, обнаруженном блоком 10, сигнал с ЭМ 11 снимается, селектор 4 переводится в положение «гидромеханика», управление дозатором 5 и РЗ 6 и 7 переводится на ГМР 9.
При исправном ЭР 2 в блоке 10 дополнительно выполняются следующие операции.
По информации, получаемой из БД 1, определяется режим взлета самолета. Например, в САУ СУ самолета Ан-140, в СУ которого входят два двигателя ТВ3-117 ВМА-СБМ1 производства ОАО «Мотор сич» г.Запорожье, Украина, признак «Взлетный режим» формируется при одновременном выполнении следующих условий:
- αруд ≥94° (положение РУД),
и
- наличие сигнала «Воздушный винт на промежуточном упоре».
По измеренным положению рычага управления двигателем, температуре и давлению воздуха на входе в двигатель, давлению воздуха за компрессором, температуре газов за турбиной и частоте вращения ротора двигателя по известным зависимостям определяют заданный расход топлива в КС двигателя.
Так, например, в электронном регуляторе РЭД-2000 производства ОАО «СТАР», г.Пермь, являющемся ядром САУ двигателя ТВ3-117 ВМА-СБМ1, это делается следующим образом.
Вычисляются заданные значения регулируемых параметров двигателя:

где nк - заданная частота вращения компрессора двигателя;
αРУД - положение РУД;
Т*ВХ - температура воздуха на входе в двигатель;
Р*ВХ - давление воздуха на входе в двигатель.

где
nст - заданная частота вращения свободной турбины двигателя;
αРУД - положение РУД.
Вычисляются заданные значения ограничиваемых параметров двигателя:

где Т*т - заданная температура газов перед свободной
турбиной двигателя;
αРУД - положение РУД;
Т*ВХ - температура воздуха на входе в двигатель;
Р*ВХ - давление воздуха на входе в двигатель.

где
Рк* - заданное давление воздуха за компрессором двигателя;
αРУД - положение РУД;
Р*ВХ - давление воздуха на входе в двигатель.

где
nВmax - максимально допустимая частота вращения компрессора двигателя;

где
nСТmax - максимально допустимая частота вращения свободной турбины двигателя.
Далее вычисленные по зависимостям 1-6 заданные значения параметров двигателя сравниваются с соответствующими им измеренными в БД 1. Вычисленные величины рассогласования селектируются по минимуму (выбирается минимальная величина).
Выбранная минимальная величина селектируется по минимуму с заданными значениями, вычисленными по программам переходных режимов:

где  - заданное ускорение компрессора двигателя;
- заданное ускорение компрессора двигателя;
αРУД - положение РУД;
Р*ВХ - давление воздуха на входе в двигатель.
 - приведенная по температуре воздуха на входе в двигатель частота вращения компрессора двигателя
- приведенная по температуре воздуха на входе в двигатель частота вращения компрессора двигателя

где
Gт - заданный расход топлива в КС двигателя;
Рk* - заданное давление воздуха за компрессором двигателя;
пр - приведенный параметр;
nВДПР - приведенная по температуре воздуха на входе в двигатель частота вращения компрессора двигателя.
При селекции используются соответствующие коэффициенты приведения рассогласований к безразмерному виду.
Далее по отселектированной величине («ошибке регулирования») с помощью ПИД-алгоритма формируется заданный расход топлива в КС двигателя.
Количественные характеристики, используемые в зависимостях 1 - 8, и величины коэффициентов, используемых при селекции и вычислении заданного положения дозатора, приведены в документе «Техническое задание «Система автоматического управления и контроля двигателя ТВ3-117-ВМА-СБМ1», ЗМКБ «Прогресс», г.Запорожье, 1999 г.
Далее по измеренному с помощью БД 1 положению дозатора 5 топлива и первой заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют текущий расход топлива в КС двигателя.
Пример такой зависимости для дозатора топлива агрегата HP-2000 производства ОАО «СТАР», г.Пермь, входящего в состав САУ двигателя ТВ3-117 ВМА-СБМ1, приведен в таблице 1.
Далее по измеренным положению РУД (αРУД) и давлению воздуха на входе в двигатель (Р*ВХ) и второй заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют минимально допустимый расход топлива в КС для текущего режима работы двигателя и высоты полета самолета (Gт min).
Пример такой зависимости для двигателя ТВ3-117 ВМА-СБМ1, входящего в состав СУ самолета Ан-140, приведен в таблице 2.
Далее сравнивают текущий расход топлива и минимально допустимый, если текущий расход топлива больше минимально допустимого, сравнивают заданный расход топлива и минимально допустимый, если заданный расход топлива становится меньше минимально допустимого, по команде блока 10 ЭР 2 блокирует изменение текущего расхода топлива в течение наперед заданного времени, определяемого расчетно-экспериментальным путем (для двигателя ТВ3-117 ВМА-СБМ1 это время составляет 1 с).
Если по истечении этого времени заданный расход топлива не стал больше минимально допустимого, по команде блока 10 с помощью электромагнита 11 и селектора 4 переводят управления двигателем на ГМР 9, формируют сигнал «Управление двигателем от ГМР» и подают его на табло 12 в кабине пилота.
Таким образом, обеспечивается повышение качества контроля системы управления ГТД в полете и, как следствие, повышение надежности ГТД и безопасности самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2474712C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2472957C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2497000C1 |
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2017 |
|
RU2661802C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2516761C2 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРОННО-ГИДРОМЕХАНИЧЕСКОЙ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2432476C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2334888C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2439349C2 |
| СПОСОБ УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА НА ЗАПУСКЕ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2392468C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2447418C2 |
Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах (САУ) автоматического управления ГТД. Сущность изобретения заключается в том, что дополнительно на взлете самолета при исправном ЭР по измеренным положению рычага управления двигателем, температуре и давлению воздуха на входе в двигатель, давлению воздуха за компрессором, температуре газов за турбиной и частоте вращения ротора двигателя по известным зависимостям определяют заданный расход топлива в камеру сгорания (КС) двигателя, по измеренному положению дозатора топлива и первой заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют текущий расход топлива в КС двигателя, по измеренным положению РУД и давлению воздуха на входе в двигатель и второй заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют минимально допустимый расход топлива в КС для текущего режима работы двигателя и высоты полета самолета, сравнивают текущий расход топлива и минимально допустимый, если текущий расход топлива больше минимально допустимого, сравнивают заданный расход топлива и минимально допустимый, если заданный расход топлива становится меньше минимально допустимого, блокируют изменение текущего расхода топлива в течение наперед заданного времени, определяемого расчетно-экспериментальным путем, если по истечении этого времени заданный расход топлива не стал больше минимально допустимого, переводят управления двигателем на ГМР, формируют сигнал «Управление двигателем от ГМР» и подают его на табло в кабине пилота. Технический результат изобретения - повышение качества контроля системы управления ГТД в полете и, как следствие, повышение надежности ГТД и безопасности самолета. 1 ил.
Способ контроля системы управления ГТД, заключающийся в том, что контролируют работоспособность электронного регулятора (ЭР) и при его отказе переводят управление ГТД на резервный гидромеханический регулятор (ГМР), отличающийся тем, что дополнительно на взлете самолета при исправном ЭР по измеренным положению рычага управления двигателем, температуре и давлению воздуха на входе в двигатель, давлению воздуха за компрессором, температуре газов за турбиной и частоте вращения ротора двигателя по известным зависимостям определяют заданный расход топлива в камеру сгорания (КС) двигателя, по измеренному положению дозатора топлива и первой заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют текущий расход топлива в КС двигателя, по измеренным положению РУД и давлению воздуха на входе в двигатель и второй заранее заданной зависимости, формируемой расчетно-экспериментальным путем, определяют минимально допустимый расход топлива в КС для текущего режима работы двигателя и высоты полета самолета, сравнивают текущий расход топлива и минимально допустимый, если текущий расход топлива больше минимально допустимого, сравнивают заданный расход топлива и минимально допустимый, если заданный расход топлива становится меньше минимально допустимого, блокируют изменение текущего расхода топлива в течение наперед заданного времени, определяемого расчетно-экспериментальным путем, если по истечении этого времени заданный расход топлива не стал больше минимально допустимого, переводят управления двигателем на ГМР, формируют сигнал «Управление двигателем от ГМР» и подают его на табло в кабине пилота.
| ВАСИЛЬЕВ В.И | |||
| Автоматический контроль и диагностика систем управления силовыми установками летательных аппаратов | |||
| - М.: Машиностроение, 1989, с.23-27 | |||
| СПОСОБ КОНТРОЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2387856C2 |
| СПОСОБ ДИАГНОСТИКИ ДВУХКАНАЛЬНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2313677C1 |
| СПОСОБ ИСПЫТАНИЯ ДВУХКАНАЛЬНОЙ ЭЛЕКТРОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГТД С БЛОКОМ ВСТРОЕННОГО КОНТРОЛЯ | 2007 |
|
RU2351909C2 |
| RU 2063622 C1, 10.07.1996 | |||
| ЕР 1619489 А1, 25.01.2006 | |||
| US 5168447 A, 01.12.1992. | |||

