Изобретение относится к области авиационного двигателестроения, а именно к способам управления газотурбинного двигателя (ГТД) на прерванном взлете самолета.
В процессе эксплуатации авиационной техники возможен прерванный взлет самолета, иногда именуемый как отклоненный взлет (rejected takeoff, RTO), при котором воздушное судно вынужденно прерывает свой разбег по взлетно-посадочной полосе и экстренно останавливается. Как правило, прерванный взлет применяется в аварийных ситуациях, например, из-за неожиданно возникшей помехи на взлетно-посадочной полосе (ВПП), пожара на борту, отказа взлетной конфигурации самолета и др. Согласно руководства по летной эксплуатации в подобных случаях и при скорости движения самолета меньше скорости принятия решения V1 пилот переводит рычаги управления ГТД из положения максимального (взлетного) режима в положение малого газа. Далее принимаются меры по торможению самолета, например, включают тормозные механизмы колес шасси, интерцепторы, воздушные тормоза. При необходимости включают реверсивное устройство (РУ) двигателей.
Однако в процессе прерванного взлета самолета дополнительно может возникнуть отказ системы топливопитания двигателя, который приводит к тому, что после перевода рычага управления двигателем (РУД) на малый газ, режим работы одного из двигателей остается на максимальном режиме или снижается с недопустимо низким темпом. Последствием такой ситуации, квалифицируемой специалистами как неуправляемость и/или разнотяговость двигателей, может оказаться выкатывание самолета за пределы ВПП в боковом направлении с последующим повреждением и даже разрушением конструкции воздушного судна.
Возможной причиной сохранения максимального режима или недопустимо низкого темпа снижения параметров двигателя на прерванном взлете может явиться отказ исполнительного элемента дозатора топлива, который система топливопитания двигателя сама парировать не может. Специалистам ясно, что подобный отказ наиболее критичен для современных типов самолетов гражданского назначения двухдвигательной конструкции, преимущественно с размещением двигателей на крыле под пилоном.
Предметом настоящего изобретения является предотвращение предпосылки к авиационному происшествию на прерванном взлете, а именно исключение высокого уровня тяги двигателя на прерванном взлете самолета во избежание его выкатывания за пределы ВПП.
Известен способ управления авиационным газотурбинным двигателем ПС-90А, заключающийся в том, что при прерванном взлете самолета для прекращения разбега по ВПП пилот резко (за 1… 2 секунды) переводит рычаги управления обоих двигателей из положения максимального (взлетного) режима в положение малого газа. Далее экипаж принимает меры по торможению самолета. При этом согласно руководства по технической эксплуатации на двигатель ПС-90А в случае, если после перемещения РУД режим работы двигателя не меняется (остается на высоком режиме), то сначала выключают электронный регулятор двигателя и осуществляют переход на управление двигателем от резервной автоматики (гидромеханики). И если управляемость двигателя не восстановилась, то тогда пилот осуществляет экстренный останов двигателя путем перевода выключателя стоп-крана «Работа-Останов» в положение «Останов», что обеспечивает полное прекращение подачи топлива в камеру сгорания и уменьшение разворачивающего момента сил, действующего на самолет.
К недостаткам данного способа относится повышенный уровень ручного труда пилота для устранения отказа топливорегулирующей аппаратуры в условиях прерванного взлета. Действительно, после прекращения взлета самолета, что само по себе уже является авиационным инцидентом, летчик должен перед экстренным выключением двигателя оперативно распознать возникшую аварийную ситуацию; далее вручную, в зависимости от сложившейся летной ситуации, в т.ч. скорости движения самолета, с заданным быстродействием и во избежание схода самолета с ВВП поэтапно выполнить необходимые действия. Это затруднительно, особенно при наличии усложнения условий эксплуатации и дополнительной психоэмоциональной нагрузки на экипаж (скользкая ВПП из-за дождя или мокрого снега, сильные порывы бокового ветра, возможный рост неисправностей бортового оборудования и т.д.).
Известен способ и устройство для применения реверсов тяги летательного аппарата (ЛА) согласно патента RU №2449153 (МПК F02K 1/76, опубл. 27.04.2012), который предусматривает автоматическое применение реверсоров тяги при контакте ЛА с землей и достижении заданной скорости движения ЛА, а также автоматическое применение реверсоров тяги при прерванном взлете ЛА на основе данных о скорости перемещении РУД с максимального режима на малый газ.
Кроме того, упомянутые реверсоры тяги (в российской терминологии реверсивные устройства) включаются, если соблюдены следующие условия:
- пилот выбрал реверсивную тягу, соответствующую упомянутому заранее определенному режиму;
- пилот установил орган управления упомянутыми реверсорами тяги в заранее определенное положение, называемое автоматическим положением;
- летательный аппарат находится в одной из двух следующих конфигураций:
• в конфигурации захода на посадку перед приземлением;
• в конфигурации взлета.
Указанный аналог позволяет избежать асимметрии общей тяги двигателей в случае плохого позиционирования рычага управления одного из двигателей при развернутом положении реверсоров тяги всех двигателей или ошибочный контроль (управление) тяги двигателей при неисправности реверсора тяги одного из двигателей. Кроме того, в случае прерванного взлета указанный аналог предусматривает автоматическое включение реверсоров при резком переводе двигателей пилотом в режим малого газа.
К недостаткам данного аналога относится:
- отсутствует функция автоматического выявления и парирования нелокализованного отказа исполнительного элемента системы топливопитания, приводящего к сохранению высокой тяги двигателя на прерванном взлете самолета;
- автоматическое включение реверсоров фактически предусматривает их обязательное включение на прерванном взлете. Однако, это не всегда требуется, например, при скорости разбега самолета до 70…120 км/час, т.е. на начальной стадии разбега по ВПП;
- сложность алгоритма включения реверсивного устройства, необходимость применения системы управления полетом типа FMS (Flight Management System), предусматривающей заблаговременное задание уровня реверсированной тяги, что требует дополнительных трудозатрат экипажа, а в случае резкой смены погодных условий или непредвиденных отказов при посадке или особых ситуаций на полосе имеется риск нежелательных последствий.
Также приняты во внимание другие патенты, которые имеют сходные недостатки (патент RU №2 783 048, патент RU №2488706).
Наиболее близким по сходству выполняемых операций и технической сущности к заявляемому изобретению, принятому за прототип, является способ управления ГТД при торможении самолета в условиях прерванного взлета (патент RU №2730731).
Способ заключается в том, что управление режимом работы ГТД и его реверсивным устройством (РУ) осуществляют с помощью электронного регулятора по заданному положению РУД, заранее формируют наперед заданное предельное значение τпред времени перемещения РУД из положения «Максимальный режим» в положение включения РУ, в случае прерванного взлета в процессе движения самолета по ВПП определяют текущее время т перемещения РУД из положения «Максимальный режим» в положение включения РУ, сравнивают текущее значение τ с предельным значением τпред; в случае, если текущее значение т меньше предельного значения τпред, информационный сигнал «Скорость самолета не превышает скорость принятия решения VI» присутствует, сигнал обжатия опор шасси самолета типа присутствует, то осуществляют перевод РУ из положения «Прямая тяга» в положение «Обратная тяга», при этом режим работы ГТД формируется согласно положения РУД.
Кроме того, формирование предельного значения τпред, определение т фактического времени перемещения РУД из положения «Максимальный режим» в положение включения РУ, а также сравнение τпред и т осуществляют в электронном регуляторе ГТД, в качестве предельного значения применяют константу τпред, равную 2 секундам. Формирование и передачу в электронный регулятор сигнала «Скорость самолета не превышает скорость принятия решения VI» и сигнала обжатия опор шасси осуществляют в системе управления самолетным оборудованием.
Из описания прототипа следует, что электронный регулятор двигателя представляет собой специализированный цифровой вычислительный комплекс. В электронном регуляторе в частности происходит измерение угла поворота РУД, параметров температуры и давления воздуха на входе в двигатель, что позволяет формировать заданный режим работы ГТД, включая его реактивную тягу и расход топлива в камеру сгорания.
К недостатку прототипа следует отнести отсутствие функции автоматического выявления и парирования латентного (скрытого) отказа исполнительного элемента системы топливопитания двигателя, приводящего к сохранению высокой тяги двигателя на прерванном взлете самолета.
Кроме того, специалистам в области авиации ясно, что включение РУ на прерванном взлете необязательно т.к. для торможения самолета в ряде случаев достаточен перевод режима работы двигателей со взлетного на малый газ, например, в начале разбега по ВПП. Решение о включении РУ в условиях прерванного самолета обычно детально оговаривается в руководстве по летной эксплуатации самолета и конкретизируется для каждого типа двигателя. Таким образом, признаком прерванного взлета самолета в общем случае может явиться резкий перевод РУД из положения взлетного режима в положение малый газ по меньшей мере, с последующим дальнейшим перемещением РУД для включения РУ при необходимости.
Однако диагностика прерванного взлета только по скорости перемещения РУД носит косвенный и неполный характер, поскольку не учитывает состояние конфигурации самолета и др. Кроме того, в случае переменного отказа датчика положения Lруд возможны ложные измерения положения РУД, и как следствие, ошибочная диагностика прерванного взлета. Для обеспечения надежной (достоверной) идентификации прерванного взлета самолета необходимо применение информационного сигнала из самолетной системы как системы верхнего уровня, полностью и однозначно контролирующей состояние и управление самолета в целом.
Технической проблемой, решение которой обеспечивается только при осуществлении предлагаемого изобретения и не может быть реализовано при использовании прототипа, является недостаточная безопасность полета в условиях прерванного взлета самолета вследствие возникновения латентного (нелокализованного) отказа системы топливопитания одного из двигателей, приводящего к его высокой тяге и асимметрии общей тяги двигателей (разнотяговости) при торможении самолета.
Технической задачей изобретения является повышение уровня безопасности полета путем высоконадежного определения режима прерванного взлета самолета и автоматического исключения высокой тяги двигателя в условиях прерванного взлета без включения РУ при нелокализованном отказе системы топливопитания двигателя.
Это возможно за счет:
- повышения надежности (достоверности) идентификации прерванного взлета самолета путем применения информационного сигнала из самолетной системы, характеризующего критический этап полета самолета /прерванный взлет;
- автоматической идентификации отказа системы топливопитания двигателя, приводящего к его высокой тяге в условиях прерванного взлета;
- своевременного и надежного парирования высокой тяги ГТД в условиях прерванного взлета путем автоматического прекращения (отсечки) подачи топлива в камеру сгорания ГТД.
Техническая проблема решается тем, что в способе управления ГТД на прерванном взлете самолета без включения РУ, заключающемся в том, что с помощью электронного регулятора ГТД управляют реактивной тягой ГТД путем изменения частоты вращения nвл ротора высокого давления ГТД в функциональной зависимости от измеренного положения рычага управления двигателем Lруд и параметров воздуха на входе в ГТД, также с помощью электронного регулятора ГТД формируют первый информационный дискретный сигнал I1 в случае, если время т перемещения РУД из положения максимального режима в положение малый газ меньше предельного значения τпред, также с помощью электронного регулятора ГТД регистрируют наличие второго информационного дискретного сигнала I2 обжатия опор шасси самолета взлетно-посадочной полосы, согласно изобретению, заранее в электронном регуляторе ГТД дополнительно формируют функциональную зависимость предельно-допустимых значений  частоты вращения ротора высокого давления ГТД для текущих условий прерванного взлета в виде
частоты вращения ротора высокого давления ГТД для текущих условий прерванного взлета в виде  также дополнительно с помощью электронного регулятора ГТД регистрируют третий информационный дискретный сигнал I3 «критический этап полета самолета /прерванный взлет», формируют в электронном регуляторе ГТД диагностический признак «Прерванный взлет без включения РУ» при одновременном наличии первого I1, второго I2 и третьего I3 информационных дискретных сигналов и положении рычага управления двигателем на режиме малого газа; сравнивают измеренное значение частоты nвд вращения ротора высокого давления ГТД с предельно-допустимым значением
также дополнительно с помощью электронного регулятора ГТД регистрируют третий информационный дискретный сигнал I3 «критический этап полета самолета /прерванный взлет», формируют в электронном регуляторе ГТД диагностический признак «Прерванный взлет без включения РУ» при одновременном наличии первого I1, второго I2 и третьего I3 информационных дискретных сигналов и положении рычага управления двигателем на режиме малого газа; сравнивают измеренное значение частоты nвд вращения ротора высокого давления ГТД с предельно-допустимым значением  , и если диагностический признак «Прерванный взлет без включения РУ» наблюдается (сформирован) более заданного промежутка времени Δτ1, а измеренное значение частоты nвд вращения ротора высокого давления ГТД в процессе прерванного взлета режим работы ГТД превышает предельно-допустимое значение частоты вращения ротора высокого давления ГТД в течение заданного промежутка времени Δτ2, то с помощью электронного регулятора осуществляют прекращение подачи топлива в ГТД и выдачу информационного дискретного сигнала «Включение защиты от асимметрии тяги».
, и если диагностический признак «Прерванный взлет без включения РУ» наблюдается (сформирован) более заданного промежутка времени Δτ1, а измеренное значение частоты nвд вращения ротора высокого давления ГТД в процессе прерванного взлета режим работы ГТД превышает предельно-допустимое значение частоты вращения ротора высокого давления ГТД в течение заданного промежутка времени Δτ2, то с помощью электронного регулятора осуществляют прекращение подачи топлива в ГТД и выдачу информационного дискретного сигнала «Включение защиты от асимметрии тяги».
Кроме того, величина предельно-допустимого значения  частоты вращения ротора высокого давления ГТД для условий прерванного взлета определяется по функциональной зависимости:
частоты вращения ротора высокого давления ГТД для условий прерванного взлета определяется по функциональной зависимости:

где nвд нач - величина частоты вращения nвд в момент формирования признака «Прерванный взлет без включения РУ», К - заранее установленная константа; Δτ3 - значение времени, прошедшее с момента формирования признака «Прерванный взлет без включения РУ»; при этом зона предельно-допустимых значений частоты вращения ротора высокого давления 
 ограничена минимальной величиной
ограничена минимальной величиной  при которой отказ системы топливопитания двигателя не приводит к опасной для самолета разнотяговости двигателей.
при которой отказ системы топливопитания двигателя не приводит к опасной для самолета разнотяговости двигателей.
Кроме того, параметр Δτ1=2 сек.; параметр Δτ2=0,2 сек.;
Кроме того, параметр К в 2,7…3,3 раза меньше, чем скорость снижения частоты вращения ротора высокого давления nвд исправного ГТД после перевода РУД из положения максимального режима в положение малый газ за время менее, чем 2 сек.
Кроме того, формирование второго информационного дискретного сигнала I2 касания опор шасси самолета взлетно-посадочной полосы и его передачу в электронный регулятор ГТД осуществляют в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3.
Кроме того, формирование третьего информационного дискретного сигнала Iз «критический этап полета самолета /прерванный взлет» и его передачу в электронный регулятор ГТД осуществляют в виде релейного сигнала номинальным напряжением +28 В постоянного тока или в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3.
На фиг. 1 представлена блок-схема устройства для реализации заявляемого способа управления газотурбинного двигателя на прерванном взлете самолета.
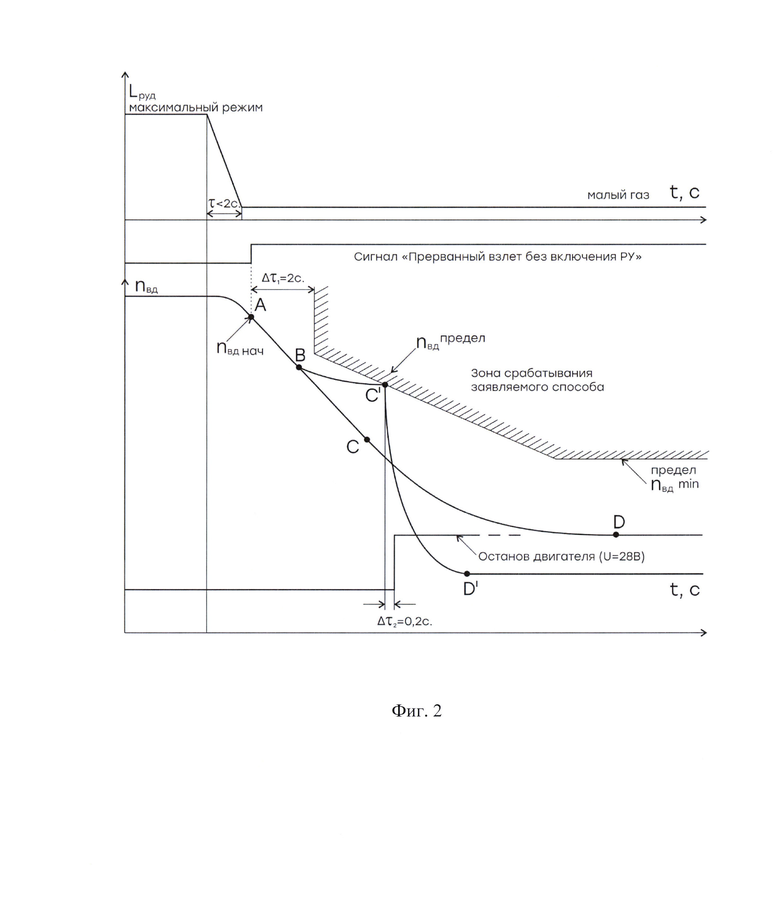
На фиг. 2 представлен график изменения параметров ГТД (Lруд, nвд), ряда информационных дискретных сигналов при исправном и неисправном состоянии системы топливопитания ГТД на прерванном взлете самолета. На данном графике также показана примерная зависимость предельно-допустимых значений  частоты вращения ротора высокого давления ГТД от времени
частоты вращения ротора высокого давления ГТД от времени 
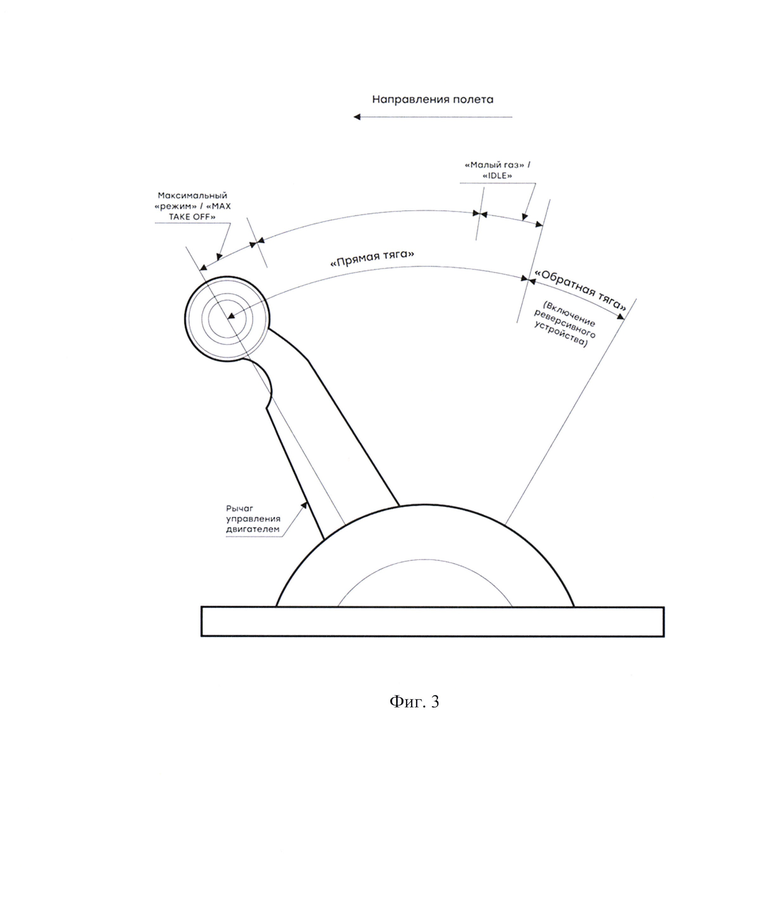
На фиг. 3 представлена иллюстрация внешнего вида РУД и его основные эксплуатационные положения, упомянутые в настоящем изобретении.
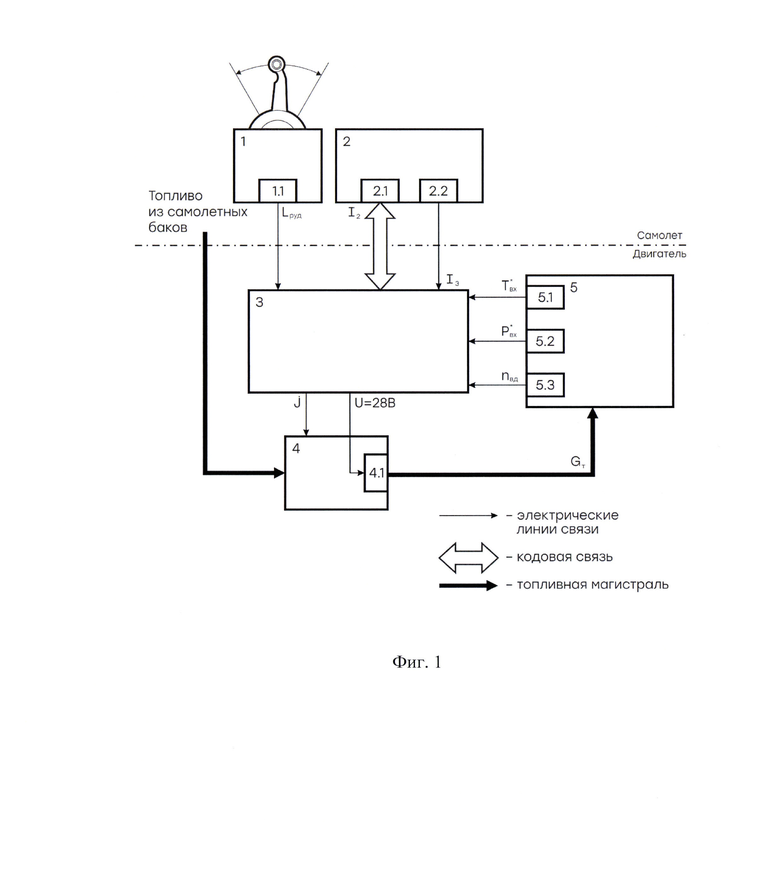
Устройство содержит рычаг 1 управления двигателем с размещенными на этом рычаге датчиком 1.1, измеряющим угол положения РУД, система 2 управления самолетным оборудованием, содержащая по меньшей мере модуль 2.1 формирования второго информационного дискретного сигнала I2 касания опор шасси самолета взлетно-посадочной полосы и модуль 2.2 формирования третьего информационного дискретного сигнала I3 «критический этап полета самолета /прерванный взлет»; электронный регулятор 3 ГТД, дозатор топлива 4 с клапаном 4.1 отсечки (прекращения) подачи топлива в ГТД, собственно ГТД 5, содержащий по меньшей мере компрессор, камеру сгорания, турбину (не показаны), а также датчик 5.1 температуры воздуха Твх* на входе в двигатель, датчик 5.2 давления воздуха Рвх* на входе в двигатель и датчик 5.3 частоты вращения пвд ротора высокого давления ГТД.
Рычаг 1 управления двигателем (РУД) это орган управления тягой газотурбинного двигателя. Каждому положению РУД соответствует вполне определенный режим работы ГТД, поэтому для изменения режима работы (тяги) ГТД летчик перемещает РУД.
В качестве датчика положения РУД могут быть использованы известные датчики углового перемещения, например, синусно-косинусный вращающийся трансформатор типа ДБСКТ, фотоэлектронный энкодер, но предпочтительно применять индукционные датчики типа RVDT - Rotary Variable Differential Transformer (вращающийся регулируемый дифференциальный трансформатор). Связь датчика RVDT с РУД механическая. Датчик располагают непосредственно в блоке рычагов управления двигателями, размещенном на центральном пульте управления в кабине экипажа.
Система 2 управления самолетным оборудованием представляет собой типовую систему управления типа СУОСО, которая предназначена для управления и контроля технического состояния самолетного оборудования, обеспечения экипажа и сопрягаемого оборудования необходимой информацией о состоянии систем самолета, например, таких как система управления уборкой и выпуском шасси, топливная система, маршевые газотурбинные двигатели, системы пожарной защиты, системы торможения колес и т.д. Для краткости не задействованные в настоящем изобретении системы не показаны. Система 2 управления самолетным оборудованием формирует в модуле 2.1 второй информационный дискретный сигнал касания опор шасси самолета взлетно-посадочной полосы, а в модуле 2.2 третий информационный дискретный сигнал I3 «критический этап полета самолета /прерванный взлет».
В авиации вышеуказанные информационные сигналы I2 и I3 достаточно известны, способ их формирования не является задачей настоящего изобретения. В общем случае оба этих сигнала могут поступать на вход электронного регулятор ГТД в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3 или западного стандарта ARINC-429 по типовой двунаправленной кодовой линии связи из системы 2, и/или в виде в виде релейного сигнала номинальным напряжением +28 В постоянного тока, т.е. в различных вариациях. Средства передачи сигналов I2 и I3 также могут быть любыми известными, например, это электрические провода (витая экранированная пара), оптоволоконный кабель, радиоканал и др.
В состав устройства также входит электронный регулятор 3 двигателя, представляющий специализированную цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации и выдачи управляющих и информационных сигналов согласно заданных алгоритмов работы и программ регулирования, что позволяет формировать требуемый режим работы ГТД, включая его реактивную тягу и расход топлива.
Специалистам в данной области понятно, что электронный регулятор современного двухконтурного двигателя является основным устройством цифровой системы автоматического управления двигателя и взаимодействует со значительно большим количеством электрических датчиков, чем это показано на фиг. 1. В частности, электронный регулятор такого двигателя обеспечивают измерение таких параметров как положение рычага управления двигателем Lруд, температура и давление воздуха на входе в ГТД Твх*, Рвх*, расход топлива Gт в камеру сгорания, частота вращения ротора вентилятора nв и частота вращения ротора высокого давления nвд, положение лопаток входных направляющих аппаратов компрессора, давление воздуха за компрессором Рк*, температура и давление газов за турбиной двигателя и др. С помощью сигнализаторов, взаимодействующих с регулятором, контролируется положение множества элементов ГТД и самолета, в т.ч. положение антипомпажных клапанов перепуска компрессора и элементов РУ, механизации крыла, положение стояночного тормоза и др.
В энергонезависимом постоянном запоминающем устройстве (ПЗУ -Read Only Mamory, ROM) электронного регулятора 3 наряду с типовыми программами регулирования ГТД дополнительно введена заранее установленная зависимость предельных (предельно-допустимых) значений частот вращений для условий прерванного взлета  , где τ - время. График заранее установленной зависимости
, где τ - время. График заранее установленной зависимости  в виде ограничительной сверху (заштрихованной) программы представлен на фиг. 2.
в виде ограничительной сверху (заштрихованной) программы представлен на фиг. 2.
Согласно изобретения эксплуатация двигателя выше предельного значения частоты вращения для условий прерванного взлета не предусматривается.
Дозатор 4 топлива является основным исполнительным элементом топливопитания двигателя и предназначен для дозирования расхода топлива Gт в ГТД по управляющему воздействию от электронного регулятора 3. Обычно в статике и в динамике электронный регулятор 3 подавая электрическую команду j в дозатор 4 на его электрогидропреобразователь (не показан), обеспечивает перемещение дозирующей иглы дозатора 3, до тех пор, пока фактическое значение расхода топлива Gт не сравняется с расчетным, которое необходимо в данный момент для поддержания требуемого уровня тяги ГТД 5 согласно заданного положения РУД.
Клапан 4.1 останова представляет собой типовой электромагнитный отсечной клапан, перекрывающий магистраль подачи топлива в камеру сгорания ГТД по дискретной команде напряжением U=28 В из электронного регулятора 3. В общем случае, этот клапан может сработать и по команде электронного регулятора 3, например, при помпаже компрессора ГТД или несанкционированном забросе режима ГТД, но согласно изобретения данный клапан также прекращает подачу топлива в камеру сгорания при превышении фактической частоты вращения пвд над заранее установленной предельной величиной частоты  д ля условий прерванного взлета.
д ля условий прерванного взлета.
ГТД 5 - любой известный тип газотурбинного двигателя, но предпочтительно применение двухвального, двухконтурного двигателя.
Выход датчика 1.1 положения РУД соединен с входом электронного регулятора 3. Выходы системы 2 соединены со входами электронного регулятора 3 для передачи/приема сигналов I2 и I3. Выходы датчиков параметров ГТД 5.1, 5.2 и 5.3 соединены с соответствующими входами электронного регулятора 3. Таким образом, по поступлению вышеуказанных сигналов в электронном регуляторе происходит измерение угла поворота РУД, регистрация второго информационного сигнала I2 касания опор шасси самолета взлетно-посадочной полосы и третьего информационного сигнала I3 «критический этап полета самолета /прерванный взлет», а также измерение параметров температуры Твх* и давления Рвх* воздуха на входе в двигатель, частоты вращения nвд ротора высокого давления двигателя.
Выходы электронного регулятора 3 соединены с дозатором 4, что позволяет дозировать расход топлива Gт в камеру сгорания для формирования необходимого уровня тяги ГТД 5 при его исправной работе и осуществить включение клапана 4.1 для останова ГТД 5 при превышении фактической частоты nвд предельных (предельно-допустимых) значений частот вращений  для условий прерванного взлета согласно заранее установленной зависимости
для условий прерванного взлета согласно заранее установленной зависимости  представленной на фиг. 2. Кроме того, электронный регулятор 3 обеспечивает выдачу информационного дискретного сигнал «Включение защиты от асимметрии тяги» в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3 или западного стандарта ARINC-429 по двунаправленной кодовой линии связи в систему 2. Устройство работает следующим образом.
представленной на фиг. 2. Кроме того, электронный регулятор 3 обеспечивает выдачу информационного дискретного сигнал «Включение защиты от асимметрии тяги» в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3 или западного стандарта ARINC-429 по двунаправленной кодовой линии связи в систему 2. Устройство работает следующим образом.
При нахождении самолета на исполнительном старте обычно режим работы двигателей соответствует режиму малого газа.
В электронный регулятор 3 из системы 2 по двунаправленной кодовой связи поступает второй информационный дискретный сигнал I2 обжатия опор шасси самолета взлетно-посадочной полосы, при этом третий информационный дискретный сигнал I3 «критический этап полета самолета /прерванный взлет» отсутствует. Электронный регулятор 3 на основе измеренных значений положения рычага 1 управления двигателем Lруд, температуры и давления воздуха на входе в ГТД Твх*, Рвх* и по реализованным программам управления формирует управляющее воздействие j на дозатор топлива 4, который обеспечивает требуемый расхода топлива в ГТД для обеспечения тяги малого газа. Клапан останова 4.1 выключен.
Для взлета самолета экипаж переводит рычаги управления двигателями в положение максимального (взлетного) режима.
После перевода РУД в положение максимальной тяги по управляющему воздействию j регулятора 3 дозатор 4 обеспечивает автоматическое увеличение расхода топлива Gт в камеру сгорания, в результате происходит рост режима работы ГТД и ускоряющееся движение самолета по взлетно-посадочной полосе. При отсутствии аварийных ситуаций осуществляется дальнейший разбег и последующие штатные этапы полета (отрыв, набор высоты, крейсерский режим полета и т.д.).
В аварийных ситуациях, например, из-за неожиданно возникшей помехи на взлетно-посадочной полосе (ВПП), при скорости движения самолета меньше скорости принятия решения VI пилот экстренно, т.е. за время меньше чем 2 секунды, переводит рычаги управления двигателями из положения максимального (взлетного) режима в положение малого газа. Согласно заданной логике работы в регуляторе 3 формируется первый информационный дискретный сигнал I1.
Кроме того, в электронный регулятор 3 из самолетной системы 2 поступает третий информационный дискретный сигнал I3 «критический этап полета самолета /прерванный взлет».
После перевода рычагов управления в положение малого газа по команде из регулятора 3 подача топлива дозатором 4 уменьшается, режимы работы двигателей штатно снижаются в заданном темпе сброса.
На фиг. 2 показано такое штатное (нормальное) снижение частоты вращения ротора высокого давления nвд на прерванном взлете, которое происходит по траектории точек А→ В → С → D.
Далее принимаются известные меры по торможению самолета.
Однако в ситуации после перевода рычагов управления на малый газ дополнительно может возникнуть отказ исполнительного элемента дозатора топлива 4 одного из двигателей, приводящий к сохранению высокого значения расхода топлива в камеру сгорания. Как следствие, частота вращения nвд, а значит и тяги этого двигателя остаются на высоком уровне. Возникающая разнотяговость приводит к риску выкатывания самолета за пределы ВПП в боковом направлении.
На фиг. 2 показано такое нештатное снижение частоты вращения ротора высокого давления nвд на прерванном взлете, которое происходит по траектории точек А → В → С1. Видно, что отказ дозатора начинается в точке В, на что указывает дальнейшее нештатное изменение частоты nвд вращения ротора высокого давления ГТД, а в точке С1 измеренное значение частоты nвд достигает границу предельно-допустимых значений
Для парирования подобной ситуации и согласно настоящего изобретения происходит следующее.
В связи с наличием первого I1, второго I2 и третьего I3 информационных дискретных сигналов и положении рычага 1 управления двигателем на площадке малого газа в электронном регуляторе ГТД формируется диагностический признак «Прерванный взлет без включения РУ».
Далее сравнивают измеренное значение частоты nвд вращения ротора высокого давления ГТД с предельно-допустимым значением , и если диагностический признак «Прерванный взлет без включения РУ» наблюдается (сформирован) более Δτ1, а измеренное значение частоты nвд вращения ротора высокого давления ГТД в процессе прерванного взлета режим работы ГТД превышает предельно-допустимое значение частоты вращения ротора высокого давления ГТД в течение времени Атг, то с помощью электронного регулятора осуществляют прекращение подачи топлива в ГТД путем включения клапана 4.1 по управляющей дискретной команде напряжением U=28 В.
В результате отсечки топлива происходит резкое снижение частоты вращения nвд практически до 0 в точке D1. Таким образом, суммарная тяга двигателей снижается, что способствует безаварийному останову самолета.
Одновременно с отсечкой топлива из регулятора 3 обеспечивают выдачу информационного дискретного сигнал «Включение защиты от асимметрии тяги» в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3 или по двунаправленной кодовой линии связи в самолетную систему 2 для последующего послеполетного анализа возникшей ситуации, локализации и устранения отказа.
Выбор параметра nвд в качестве численного критерия обусловлен тем, что параметр nвд удовлетворительно характеризует динамику поведения двигателя при отказе дозатора топлива 4, в т.ч. современного двигателя с высокой степенью двухконтурности.
Параметр Δτ1 - это начальный период времени после формирования признака «Прерванный взлет без включения РУ», при котором заявляемая функция защиты не работает. Введение данного параметра позволяет исключить ложные срабатывания заявляемого способа в ситуации штатной кратковременной газодинамической раскрутки роторов низкого и высокого давлений на сбросе режима двигателя с большой степенью двухконтурности при открытии клапанов перепуска воздуха компрессором низкого давления. Параметр Δτ1=2 сек.
Параметр Δτ2 характеризует требуемое время превышения текущего значения частоты вращения nвд ротора высокого давления над предельно-допустимым значением  для достоверного выполнения условия срабатывания функции. Предпочтительно, чтобы параметр составлял величину Δτ2=0,2 сек.
для достоверного выполнения условия срабатывания функции. Предпочтительно, чтобы параметр составлял величину Δτ2=0,2 сек.
Согласно зависимого пункта формулы изобретения величина предельно-допустимого значения  частоты вращения ротора высокого давления ГТД для условий прерванного взлета определяется по функциональной зависимости:
частоты вращения ротора высокого давления ГТД для условий прерванного взлета определяется по функциональной зависимости:
где nвд нач - величина nвд в момент формирования признака «Прерванный взлет без включения РУ»; К - заранее установленная константа, имеет размерность (об/мин)/с; Δτ3 - значение времени, прошедшее с момента формирования признака «Прерванный взлет без включения РУ», с.
Момент формирования признака «Прерванный взлет без включения РУ» приходится на точку А, где частота вращения соответствует nвд нач и с которой начинается формирование  Далее снижение величины осуществляется линейно за равные промежутки времени.
Далее снижение величины осуществляется линейно за равные промежутки времени.
Сама зона предельно-допустимых значений частоты вращения ротора высокого давления  ограничена минимальной величиной
ограничена минимальной величиной 
 при которой отказ системы топливопитания двигателя не приводит к опасной для самолета разнотяговости двигателей.
при которой отказ системы топливопитания двигателя не приводит к опасной для самолета разнотяговости двигателей.
Заявляемый способ успешно апробирован в составе авиационного газотурбинного двигателя ПД-14 разработки АО «ОДК-Авиадвигатель» для магистрального самолета МС-21.
В качестве электронного регулятора, в котором реализован заявляемый алгоритм выявления и парирования отказа дозатора на прерванном взлете, использовали электронный регулятор двигателя РЭД-14. Электронный регулятор РЭД-14 представляет специализированную цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации от датчиков и сигнализаторов, включая 
 nвд; приема/выдачи информационных сигналов, формирования управляющих воздействий согласно заданным программам управления для обеспечения необходимого уровня тяги и надежной работы двигателя ПД-14.
nвд; приема/выдачи информационных сигналов, формирования управляющих воздействий согласно заданным программам управления для обеспечения необходимого уровня тяги и надежной работы двигателя ПД-14.
Электронный регулятор РЭД-14 является основным устройством цифровой системы автоматического управления типа FADEC (Full Authority Digital Engine Control). В иностранной патентной и технической литературе электронный регулятор двигателя РЭД-14 именуется как электронный контроллер двигателя EEC (electronic engine controller), блок управления двигателем ECU (engine control unit), блок DECU (Digital Electronic Control Unit) или электронный регулятор FADEC.
По результатам проверок заявляемого способа в составе ПД-14 определили, что параметр К целесообразно устанавливать в 2,7... 3,3 раза меньше, чем скорость снижения частоты вращения ротора высокого давления nвд исправного ГТД после перевода РУД из положения «Максимальный режим» в положение «Малый газ» за время меньше предельного значения  Так, применительно к двигателю ПД-14 параметр К ≈ 200 (об/мин)/с. Информационный сигнал I3 задавали в виде релейного сигнала номинальным напряжением +28 В постоянного тока.
Так, применительно к двигателю ПД-14 параметр К ≈ 200 (об/мин)/с. Информационный сигнал I3 задавали в виде релейного сигнала номинальным напряжением +28 В постоянного тока.
Таким образом, предлагаемое изобретение с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволит повысить уровень безопасности полета путем высоконадежного определения режима прерванного взлета самолета и автоматического исключения высокой тяги двигателя в условиях прерванного взлета без включения реверсивного устройства при нелокализованном отказе системы топливопитания газотурбинного двигателя.
Изобретение относится к области авиационного двигателестроения, а именно к способам управления газотурбинным двигателем (ГТД) на прерванном взлете самолета. Технической задачей изобретения является повышение уровня безопасности полета путем высоконадежного определения режима прерванного взлета самолета и автоматического исключения высокой тяги двигателя в условиях прерванного взлета без включения РУ при нелокализованном отказе системы топливопитания двигателя, за счет повышения надежности (достоверности) идентификации прерванного взлета самолета путем применения информационного сигнала из самолетной системы, характеризующего критический этап полета самолета/прерванный взлет, а также автоматической идентификации отказа системы топливопитания двигателя, приводящего к его высокой тяге в условиях прерванного взлета, своевременного и надежного парирования высокой тяги ГТД в условиях прерванного взлета путем автоматического прекращения (отсечки) подачи топлива в камеру сгорания ГТД. 5 з.п. ф-лы, 3 ил.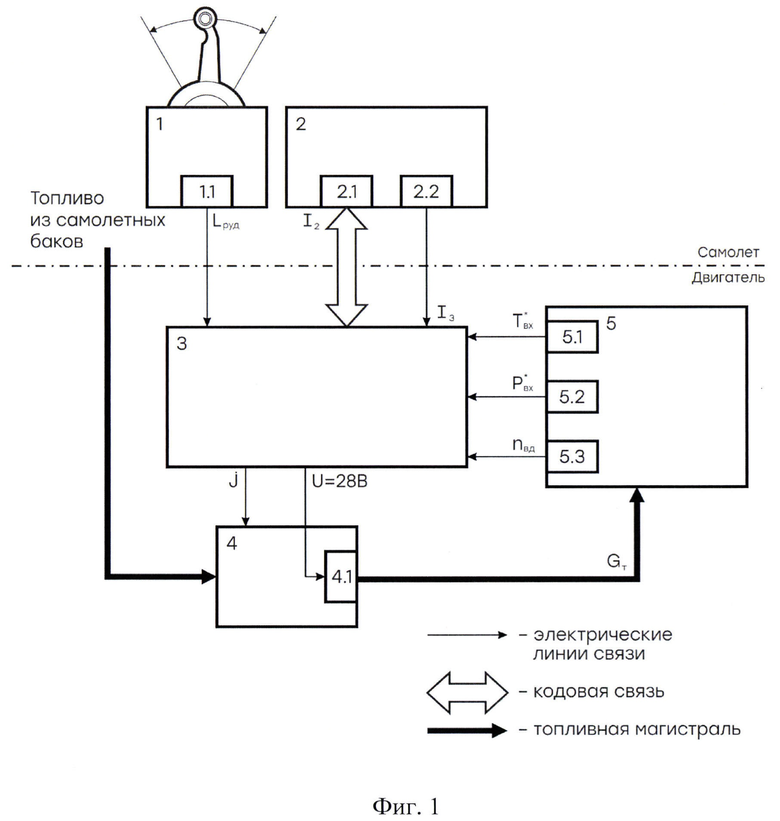
1. Способ управления газотурбинным двигателем (ГТД) на прерванном взлете самолета без включения реверсивного устройства (РУ), заключающийся в том, что с помощью электронного регулятора ГТД управляют реактивной тягой ГТД путем изменения частоты вращения nвд ротора высокого давления ГТД в функциональной зависимости от измеренного положения рычага управления двигателем Lруд и параметров воздуха на входе в ГТД, также с помощью электронного регулятора ГТД формируют первый информационный дискретный сигнал I1 в случае, если время τ перемещения рычага управления двигателем (РУД) из положения максимального режима в положение малый газ меньше предельного значения τпред, также с помощью электронного регулятора ГТД регистрируют наличие второго информационного дискретного сигнала I2 касания опор шасси самолета взлетно-посадочной полосы, отличающийся тем, что заранее в электронном регуляторе ГТД дополнительно формируют функциональную зависимость предельно-допустимых значений  частоты вращения ротора высокого давления ГТД для текущих условий прерванного взлета в виде
частоты вращения ротора высокого давления ГТД для текущих условий прерванного взлета в виде  ; также дополнительно с помощью электронного регулятора ГТД регистрируют третий информационный дискретный сигнал I3 «критический этап полета самолета / прерванный взлет», формируют в электронном регуляторе ГТД диагностический признак «Прерванный взлет без включения РУ» при одновременном наличии первого I1, второго I2 и третьего I3 информационных дискретных сигналов и положении рычага управления двигателем на режиме малый газ; сравнивают измеренное значение частоты nвд вращения ротора высокого давления ГТД с предельно-допустимым значением
; также дополнительно с помощью электронного регулятора ГТД регистрируют третий информационный дискретный сигнал I3 «критический этап полета самолета / прерванный взлет», формируют в электронном регуляторе ГТД диагностический признак «Прерванный взлет без включения РУ» при одновременном наличии первого I1, второго I2 и третьего I3 информационных дискретных сигналов и положении рычага управления двигателем на режиме малый газ; сравнивают измеренное значение частоты nвд вращения ротора высокого давления ГТД с предельно-допустимым значением  и если диагностический признак «Прерванный взлет без включения РУ» наблюдается (сформирован) более заданного промежутка времени Δτ1, а измеренное значение частоты nвд вращения ротора высокого давления ГТД в процессе прерванного взлета режим работы ГТД превышает предельно-допустимое значение
и если диагностический признак «Прерванный взлет без включения РУ» наблюдается (сформирован) более заданного промежутка времени Δτ1, а измеренное значение частоты nвд вращения ротора высокого давления ГТД в процессе прерванного взлета режим работы ГТД превышает предельно-допустимое значение  частоты вращения ротора высокого давления ГТД в течение заданного промежутка времени Δτ2, то с помощью электронного регулятора осуществляют прекращение подачи топлива в ГТД и выдачу информационного дискретного сигнала «Включение защиты от асимметрии тяги».
частоты вращения ротора высокого давления ГТД в течение заданного промежутка времени Δτ2, то с помощью электронного регулятора осуществляют прекращение подачи топлива в ГТД и выдачу информационного дискретного сигнала «Включение защиты от асимметрии тяги».
2. Способ управления газотурбинным двигателем на прерванном взлете самолета без включения реверсивного устройства по п. 1, отличающийся тем, что величину предельно-допустимого значения  частоты вращения ротора высокого давления ГТД для условий прерванного взлета определяют по функциональной зависимости:
частоты вращения ротора высокого давления ГТД для условий прерванного взлета определяют по функциональной зависимости:

- где nвд нач - величина nвд в момент формирования признака «Прерванный взлет без включения РУ»,
- К - заранее установленная константа;
- Δτз - значение времени, прошедшее с момента формирования признака «Прерванный взлет без включения РУ»,
при этом зону предельно-допустимых значений частоты вращения ротора высокого давления  ограничивают минимальной величиной
ограничивают минимальной величиной  при которой отказ системы топливопитания двигателя не приводит к опасной для самолета разнотяговости двигателей.
при которой отказ системы топливопитания двигателя не приводит к опасной для самолета разнотяговости двигателей.
3. Способ управления газотурбинным двигателем на прерванном взлете самолета без включения реверсивного устройства по п. 1, отличающийся тем, что параметр Δτ1 устанавливают равным 2 с; параметр Δτ2 устанавливают равным 0,2 с.
4. Способ управления газотурбинным двигателем на прерванном взлете самолета без включения реверсивного устройства по п. 2, отличающийся тем, что параметр К устанавливают в 2,7-3,3 раза меньше, чем скорость снижения частоты вращения ротора высокого давления nвд исправного ГТД после перевода РУД из положения максимального режима в положение малый газ за время менее чем 2 с.
5. Способ управления газотурбинным двигателем на прерванном взлете самолета без включения реверсивного устройства по п. 1, отличающийся тем, что формирование второго информационного дискретного сигнала I2 касания опор шасси самолета взлетно-посадочной полосы и его передачу в электронный регулятор ГТД осуществляют в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3.
6. Способ управления газотурбинным двигателем на прерванном взлете самолета без включения реверсивного устройства по п. 1, отличающийся тем, что передачу третьего информационного дискретного сигнала I3 «критический этап полета самолета / прерванный взлет» в электронный регулятор ГТД осуществляют в виде релейного сигнала номинальным напряжением +28 В постоянного тока или в виде электронного кодового сигнала согласно ГОСТ 18977 и РТМ 1495 с изменением 3.
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ПРИ ПОСАДКЕ И ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2019 |
|
RU2730731C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2488706C2 |
| US 5142860 A1, 01.09.1992. | |||

