Изобретение относится к способам управления силовыми установками летательных аппаратов, а более конкретно - к способам автоматического управления тягой газотурбинных двигателей для поддержания заданной скорости полета самолета.
Известен способ управления скоростью полета летательного аппарата, который предусматривает измерение текущей скорости летательного аппарата V(t) и задание управляющего воздействия, пропорционального отклонению текущей V(t) от заданной скорости полета V(t)3, путем перемещения рычага управления двигателем (РУД) летательного аппарата (патент RU №2305307).
Недостатком известного способа является косвенный характер управления, так как изменение положения рычага управления двигателя (Lруд) не позволяет в полной мере оценить последующее изменение тяги газотурбинного двигателя во всех ожидаемых условиях его эксплуатации (температур Твх и давлений Рвх воздуха на входе в двигатель).
Известен способ управления полетом самолета, который предусматривает поддержание заданной скорости V(t)3 в соответствии с алгоритмом, синтезирующим взаимосвязанное перемещение рычага управления двигателем и управление углом наклона траектории. При этом директорно задаваемое через электромеханический привод автомата тяги отклонение рLруд функционально зависит от частоты вращения nвд турбокомпрессора, первой и второй производных nвд, а также ряда параметров, характеризующих динамические свойства двигателя и самолета (патент RU №2249540).
Недостатком известного способа является сложность алгоритма управления тягой, в том числе необходимость вычисления первой и второй производных nвд, а также ускоренная выработка ресурса газотурбинного двигателя из-за возможно глубоких и частых знакопеременных перемещений рычага управления двигателем.
Наиболее близким к заявляемому изобретению является способ, который предусматривает минимизацию рассогласования текущей скорости V(t) от заданной скорости V(t)3 на основе управления двигателем от вычислительной системы управления тягой (ВСУТ), взаимодействующей с вычислительной системой управления полетом самолета. Управление тягой газотурбинного двигателя (частотой вращения nвд) осуществляют по программе регулирования nвд прог=f(Lруд, Твх, Рвх) путем одновременного перемещения рычагов перемещения всех двигателей в кабине самолета от электромеханического привода, взаимодействующего с вычислительной системой управления тягой (ВСУТ), и/или - в супервизорном режиме, который предусматривает выдачу из ВСУТ в электронный регулятор каждого двигателя корректирующего сигнала частоты вращения рnвд кор, который может принимать отрицательные или положительные значения в заранее установленном фиксированном диапазоне A1<рnвд кop<A2 для уменьшения или увеличения текущей скорости V(t). По полученному корректирующему сигналу рnвд кop электронный регулятор каждого двигателя формирует программное (заданное или установочное) значение частоты вращения при работе с вычислительной системой управления тягой nвд прог=f(Lруд, Твх, Рвх)+ рnвд кop. Далее, системой автоматического управления двигателем, в состав которой входит электронный регулятор, осуществляется регулирование расхода топлива в камеру сгорания для поддержания заданного значения частоты вращения nвд прог. («Авиационный двигатель ПС - 90А», под ред. Иноземцева А.А., Москва, Либра - К, 2007 г, стр.195).
Недостатком известного способа, принятого за прототип, является возможный перегрев или повышенная выработка ресурса двигателя при передаче в электронный регулятор значительных положительных значений корректирующего сигнала рnвд кор (А2>2…5%) на различных этапах полета самолета (взлет, набор высоты, крейсерский режим и т.д.).
Техническая задача, решаемая изобретением, заключается в минимизации повреждаемости горячей части газотурбинного двигателя при совместной работе системы автоматического управления газотурбинным двигателем с вычислительной системой управления тягой за счет вводимых ограничений, налагаемых на верхний диапазон изменения программного значения частоты вращения nвд прог при значительных положительных значениях корректирующего сигнала частоты вращения рnвд кор.
Сущность технического решения заключается в том, что в способе автоматического управления тягой газотурбинных двигателей, заключающемся в изменении частот вращения nвд газотурбинных двигателей по программе nвд прог=f(Lруд, Твх, Рвх), где: Lруд - угол поворота рычага управления двигателем, Твх - температура воздуха на входе в газотурбинный двигатель, Рвх - давление воздуха на входе в газотурбинный двигатель, путем формирования и передачи из бортовой вычислительной системы управления тягой в электронный регулятор каждого газотурбинного двигателя управляющего корректирующего сигнала частоты вращения рnвд кор, согласно изобретению, предварительно в электронном регуляторе каждого газотурбинного двигателя устанавливают предельные программные значения nвд прог. пр. частот вращения для различных этапов полета самолета (взлет, набор высоты, крейсерский режим), затем дополнительно в вычислительной системе управления тягой обеспечивают формирование данных об этапе полета самолета (взлет, набор высоты, крейсерский режим) и их передачу в электронный регулятор каждого двигателя, а также формирование численных предельных программных значений частот вращения nвд прог. пр. в зависимости от этапа полета, при этом на каждом этапе полета самолета величину управляющего корректирующего сигнала частоты вращения рnвд кор ограничивают из условия nвд прог=f(Lруд, Твх, Рвх)+рnвд кор≤nвд прог.пр..
Ограничение на каждом этапе полета самолета величины управляющего корректирующего сигнала частоты вращения рnвд прог=f(Lруд, Твх, Рвх)+рnвд кор≤nвд прог.пр. позволяет исключить возможный перегрев или повышенную выработку ресурса двигателя, что повышает надежность газотурбинных двигателей.
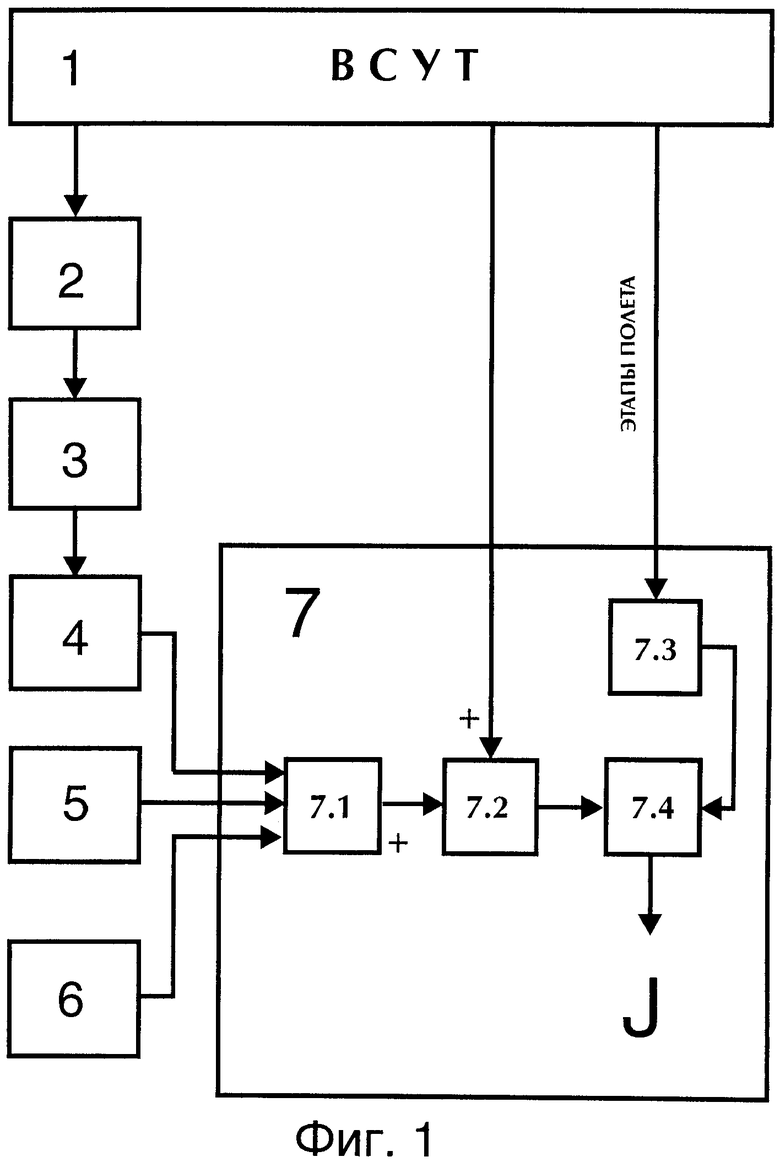
На фиг.1 - представлена структурная схема устройства для реализации заявляемого способа.
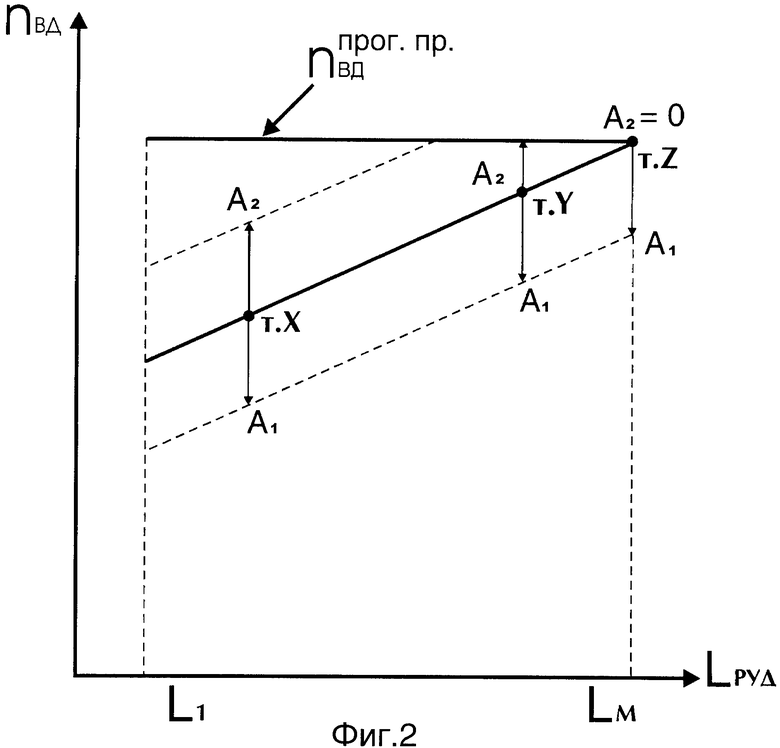
На фиг.2 - график формирования nвд прог.пр. для условий крейсерского режима работы газотурбинного двигателя.
1 - Вычислительная система управления тягой (ВСУТ). Является оборудованием самолета.
2 - Электромеханический привод, обеспечивающий перемещение рычага управления двигателем (РУД) по сигналу из ВСУТ через механическую тросовую связь.
3 - Рычаг управления двигателем.
4 - Датчик положения РУД (типовой синусно-косинусный вращающийся трансформатор или датчики-сигнализаторы).
5 - Датчик температуры воздуха Твх на входе в газотурбинный двигатель (ГТД).
6 - Датчик давления воздуха Рвх на входе в ГТД.
7 - Электронный регулятор двигателя.
Электронный регулятор двигателя представляет собой специализированную электронную цифровую вычислительную машину, предназначенную для управления ГТД и оснащенную устройствами сопряжения с датчиками, сигнализаторами, исполнительными элементами, а также системами самолета, включая вычислительные системы управления тягой и полетом самолета.
7.1 - Блок формирования программного значения частоты вращения ГТД nвд прог=f(Lруд, Твх, Рвх). В указанном блоке на основе измеренных значений параметров Lруд (4), Твх (5), Рвх (6) и по заранее установленной зависимости формируется nвд прог, которое обычно используется при отключенной ВСУТ (при управлении тягой непосредственно экипажем).
7.2 - Сумматор сигналов программного значения частоты вращения nвд прог и управляющего сигнала частоты вращения рnвд кор.
7.3 - Блок формирования предельных (предельно-допустимых) значений nвд прог.пр.. В указанном блоке на основе принятой информации об этапе полета самолета (взлет, набор высоты, крейсерский режим) и по заранее установленной зависимости формируется предельное значение частоты вращения nвд прог.пр., выше которого, согласно изобретения, эксплуатация двигателя при работе со ВСУТ не предусматривается.
Формирование nвд прог.пр. осуществляют следующим образом. Как правило, каждому этапу полета самолета соответствует свой режим работы ГТД. В частности, для взлета самолета требуется максимальный режим работы ГТД, для набора высоты - номинальный режим работы ГТД, для крейсерского (горизонтального) этапа полета - крейсерский режим работы ГТД. Кроме того, для каждого режима работы ГТД предусмотрен соответствующий диапазон перемещения рычага управления двигателем. Поэтому в качестве параметра nвд прог.пр. для каждого этапа полета используют расчетное значение nвд прог=f(Lмруд, Твх, Рвх), где: Lмруд - максимальное значение Lруд для режима работы ГТД, обеспечивающего данный этап полета. На фиг.2 представлено формирование nвд прог.пр. для условий крейсерского режима полета. L1-Lм - диапазон изменения Lруд для крейсерского режима работы ГТД.
7.4 - Блок формирования управляющего воздействия. Блок имеет два входа, на которые поступают параметр nвд прог=f(Lруд, Твх, Рвх)+ рnвд кор и параметр nвд прог.пр.. На выходе блока формируется управляющее воздействие программного значения частоты вращения nвд прог, которое принимает значение J= f(Lруд, Твх, Рвх)+рnвд кор≤nвд прог.пр.. Ограничение величиной nвд прог.пр. также проиллюстрировано на фиг.2.
Способ осуществляется следующим образом. По измеренным значениям параметров Lруд, Твх, Рвх в электронном регуляторе (в блоке 7.1) формируется программное значение частоты вращения nвд прог=f(Lруд, Твх, Рвх). При отклонении текущей скорости самолета от заданной, например при воздействии попутного или встречного ветра, турбулентности атмосферы, на выходе ВСУТ формируется управляющий корректирующий сигнал частоты вращения рnвд кор, который поступает в электронный регулятор двигателя 7 и в блоке 7.2 суммируется со значением nвд прог из блока 7.1. Суммарный сигнал из блока 7.2 поступает на первый вход блока 7.4 электронного регулятора 7. Одновременно в электронный регулятор двигателя из ВСУТ 1 поступает информация об этапе полета самолета (взлет, набор высоты, крейсерский режим), на основании которой в блоке 7.3 формируется предельное программное значение частоты вращения nвд прог.пр., которое, в свою очередь, поступает на второй вход блока 7.4. Передачу информации о корректирующем сигнале рnвд кор и этапах полета самолета из ВСУТ в электронный регулятор 7 осуществляют в цифровом коде по стандартному мультиплексному каналу связи (например, по ГОСТ 18977 «Комплексы бортового оборудования самолетов и вертолетов»).
В блоке 7.4 происходит сопоставление параметра nвд прог=f(Lруд, Твх, Рвх)+рnвд кор и параметра nвд прог.пр.. Если сигнал nвд прог не превышает параметр nвд прог.пр., то в этом случае управляющее вoздeйcтвиe J в топливорегулирующую аппаратуру на увеличение или уменьшение частоты вращения nвд формируется без каких-либо ограничений. На фиг.2 такой точкой является точка X. В случае, если параметр nвд прог превышает параметр nвд прог.пр., то происходит ограничение параметра nвд прог (величины А2). Ограничение частичное - точка Y или полное - точка Z.
Способ автоматического управления тягой газотурбинных двигателей (ГТД) заключается в изменении частот вращения nвд двигателей по программе nвд прог=f(Lруд, Твх, Рвх), где: Lруд - угол поворота рычага управления двигателем, Твх - температура воздуха на входе в ГТД, Рвх - давление воздуха на входе в ГТД. Предварительно в электронном регуляторе каждого ГТД устанавливают предельные программные значения частот вращения nвд прог.пр. для различных этапов полета самолета (взлет, набор высоты, крейсерский режим). В вычислительной системе управления тягой (ВСУТ) обеспечивают формирование данных об этапе полета и передачу их в электронный регулятор каждого двигателя. Обеспечивают формирование численных предельных программных значении частот вращения nвд прог пр. в зависимости от этапа полета. На каждом этапе полета ограничивают величину управляющего корректирующего сигнала частоты вращения рnвд кop из условия nвд прог f(Lруд, Твх, Рвх)+ рnвд кop≤nвд.прог.пр.. Указанное ограничение исключает возможный перегрев горячей части двигателя, что повышает его надежность. 2 ил.
Способ автоматического управления тягой газотурбинных двигателей, заключающийся в изменении частот вращения nвд газотурбинных двигателей по программе  где Lруд - угол поворота рычага управления двигателем, Твх - температура воздуха на входе в газотурбинный двигатель (ГТД), Рвх - давление воздуха на входе в ГТД, путем формирования и передачи из бортовой вычислительной системы управления тягой в электронный регулятор каждого двигателя управляющего корректирующего сигнала частоты вращения
где Lруд - угол поворота рычага управления двигателем, Твх - температура воздуха на входе в газотурбинный двигатель (ГТД), Рвх - давление воздуха на входе в ГТД, путем формирования и передачи из бортовой вычислительной системы управления тягой в электронный регулятор каждого двигателя управляющего корректирующего сигнала частоты вращения  отличающийся тем, что предварительно в электронном регуляторе каждого двигателя устанавливают предельные программные значения
отличающийся тем, что предварительно в электронном регуляторе каждого двигателя устанавливают предельные программные значения  частот вращения для различных этапов полета самолета (взлет, набор высоты, крейсерский режим), затем дополнительно в вычислительной системе управления тягой обеспечивают формирование данных об этапе полета самолета (взлет, набор высоты, крейсерский режим) и их передачу в электронный регулятор каждого двигателя, а также формирование численных значений
частот вращения для различных этапов полета самолета (взлет, набор высоты, крейсерский режим), затем дополнительно в вычислительной системе управления тягой обеспечивают формирование данных об этапе полета самолета (взлет, набор высоты, крейсерский режим) и их передачу в электронный регулятор каждого двигателя, а также формирование численных значений  в зависимости от этапа полета, при этом на каждом этапе полета самолета величину управляющего корректирующего сигнала частоты вращения
в зависимости от этапа полета, при этом на каждом этапе полета самолета величину управляющего корректирующего сигнала частоты вращения  ограничивают из условия
ограничивают из условия 
| ИНОЗЕМЦЕВ А.А | |||
| и др | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| - М.: Либра-К, 2007, с.195 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2249540C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2305307C2 |
| SU 1445321 A1, 10.10.1996 | |||
| СИСТЕМА ДЛЯ МОДИФИКАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ДЛЯ ВЫРАВНИВАНИЯ ИЗБЫТОЧНОЙ ТЯГИ | 2000 |
|
RU2244144C2 |
| ПОДВЕСКА ДЛЯ ГАЛЬВАНИЧЕСКОЙ ОБРАБОТКИ ПОЛЫХ ДЕТАЛЕЙ | 1972 |
|
SU434141A1 |
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ БЕСКОНЕЧИБ1Х ШИРОКИХ АБРАЗИВНБ1Х ЛЕНТ | 0 |
|
SU358139A1 |

