Изобретение относится к области машиностроения, а точнее, к области электромеханики и может найти применение для создания различных устройств перемещения в системах нанотехнологии, в системах автоматической юстировки оптических приборов, в прецизионном приборостроении и, в частности, для создания исполнительных органов систем подачи расходного материала в лазерных реактивных двигателях.
В настоящее время для прецизионных перемещений наиболее широко применяются пьезоэлектрические двигатели и актюаторы, действия которых основаны на обратном пьезоэлектрическом эффекте, при котором энергия электрического поля высокой частоты преобразуется в энергию механического движения. Недостатки таких двигателей и актюаторов состоят в невозможности осуществить непрерывное равномерное перемещение - перемещение осуществляется дискретно, шаговым вибрационным образом. Кроме того, недостатки таких устройств обусловлены также особенностями пьезокерамики - такими, как нелинейность пьезоэлектрических свойств (деформация керамики - нелинейная функция прилагаемого электрического поля), крип - запаздывание реакций керамики на изменение величины управляющего поля, гистерезис - неоднозначная зависимость деформации керамики от направления изменения поля. Они отрицательно влияют на работу устройств перемещения зондовых микроскопов, что приводит к искажению изображений. Для работы таких устройств требуются импульсы напряжения сложного временного профиля высокой частоты и высокой амплитуды (для управления, например, пакетными актюаторами требуется напряжение в пределах 500-1000 В). Такой привод оказывается источником электромагнитных и механических вибрационных помех, что в ряде случаев является недопустимым. Использование высоких напряжений накладывает требования повышенной электробезопасности при эксплуатации. Из-за высокой частоты питающего напряжения снижается рабочий ресурс пьезокерамики - она постепенно растрескивается и разрушается. Это существенно ограничивает ресурс пьезоэлектрического двигателя, который не превышает 10000 часов, что недостаточно, например, при эксплуатации в условиях космоса из-за ограниченности возможностей ремонта.
Известен также прецизионный пьезоэлектрический шаговый механизм перемещений (RU 2291551 С2, опубликован 10.01.2007 - прототип). В нем для фиксации подвижной части используются специальные узлы из фрикционных элементов. Это достаточно для обеспечения шаговых перемещений, но обусловливает низкую устойчивость фиксации, ограниченную только силами трения покоя. Ему также присущи перечисленные выше недостатки.
Задачей данного изобретения является создание устройства непрерывных прецизионных перемещений с надежной фиксацией результата перемещения и работающего при низких рабочих напряжениях, не создающего вибрационных и электромагнитных помех и нечувствительного к таким помехам извне.
Для решения поставленной задачи предлагается два варианта устройства.
Первый вариант. Устройство для прецизионных перемещений состоит из электролитической ячейки, расположенной в сквозной полости опорного корпуса, содержащий элемент твердого электролита (ТЭЛ), зафиксированный в корпусе, и два электрода, соединенных между собой предварительно напряженной непроводящей механической связью, примыкающих торцами к противоположным сторонам элемента ТЭЛ, а боковыми сторонами - к стенкам полости корпуса, выполненного так, что эти стенки служат направляющими для перемещения электродов.
Устройство отличается тем, что оно собрано в пакет так, что свободный торец электрода предыдущего пакета жестко соединен с корпусом последующего пакета.
Устройство отличается тем, что примыкающие к элементу ТЭЛ торцевые поверхности электродов скошены таким образом, что оси электродов не совпадают по направлению с осью элемента твердого электролита.
Устройство отличается тем, что механическая связь между электродами выполнена в виде рамки, охватывающая торцы электродов снаружи, или в виде стержня, ленты, струны, жестко закрепленных на наружных торцах электродов и установленных в продольных отверстиях, выполненных в электродах и ТЭЛ.
Устройство отличается тем, что поперечное сечение электродов и направляющих корпусов имеют форму, отличную от круга.
Устройство отличается тем, что имеет общую эластичную герметизирующую оболочку.
Второй вариант. Устройство для прецизионных перемещений состоит из двух механически соединенных электролитических ячеек, каждая из которых расположена в отдельном корпусе, содержит элемент ТЭЛ и два примыкающих торцами к противоположным сторонам элемента ТЭЛ электрода, одним из которых, общим для двух ячеек, механически соединены их корпуса, электроды связаны между собой предварительно напряженной общей механической непроводящей связью.
Устройство отличается тем, что оно собрано в пакет так, что жестко соединены торцы корпусов.
Устройство отличается тем, что механическая связь между электродами выполнена в виде рамки, охватывающая торцы электродов снаружи, или в виде стержня, ленты, струны, жестко закрепленных на наружных торцах электродов и установленных в продольных отверстиях, выполненных в электродах и ТЭЛ.
Устройство отличается тем, что поперечное сечение электродов и направляющих корпусов имеют форму, отличную от круга.
Устройство отличается тем, что имеет общую эластичную герметизирующую оболочку.
Изобретение поясняется описаниями его вариантов и прилагаемыми чертежами.
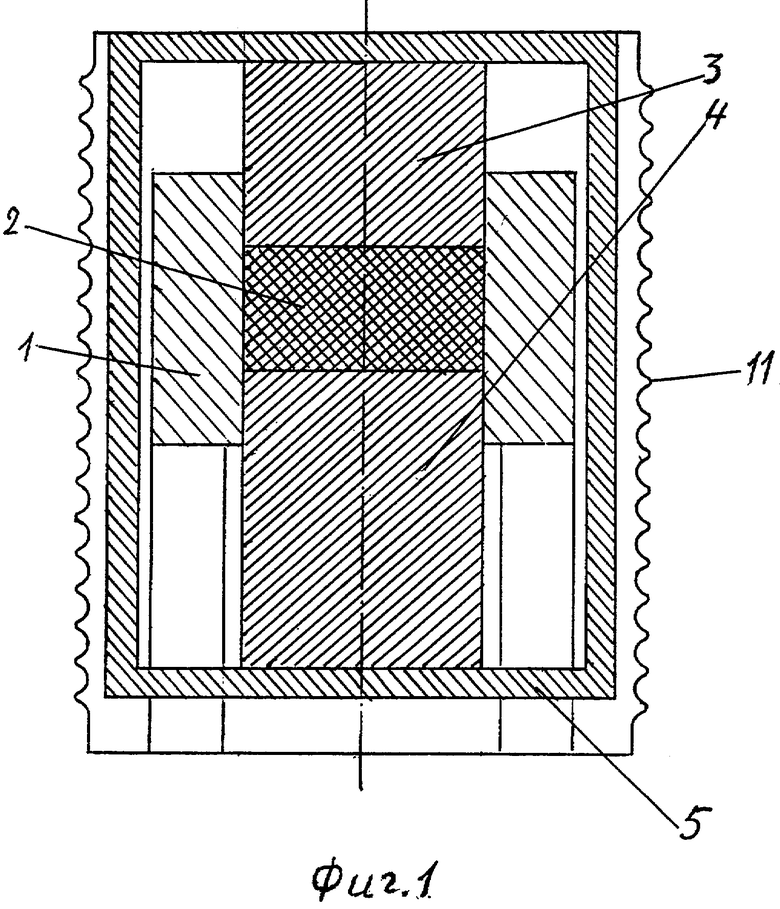
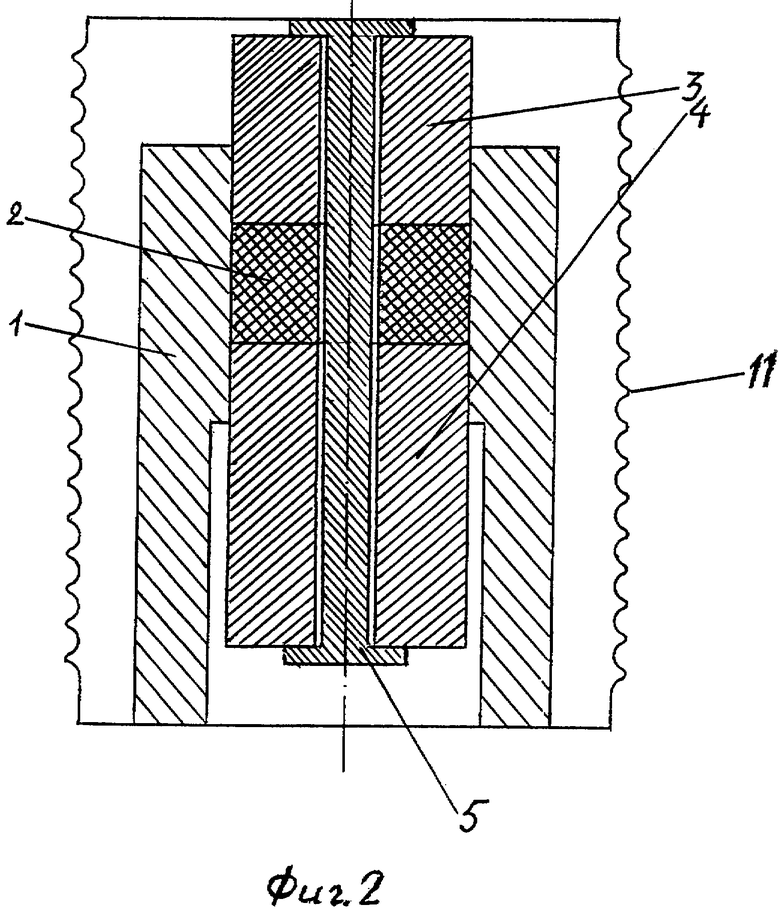
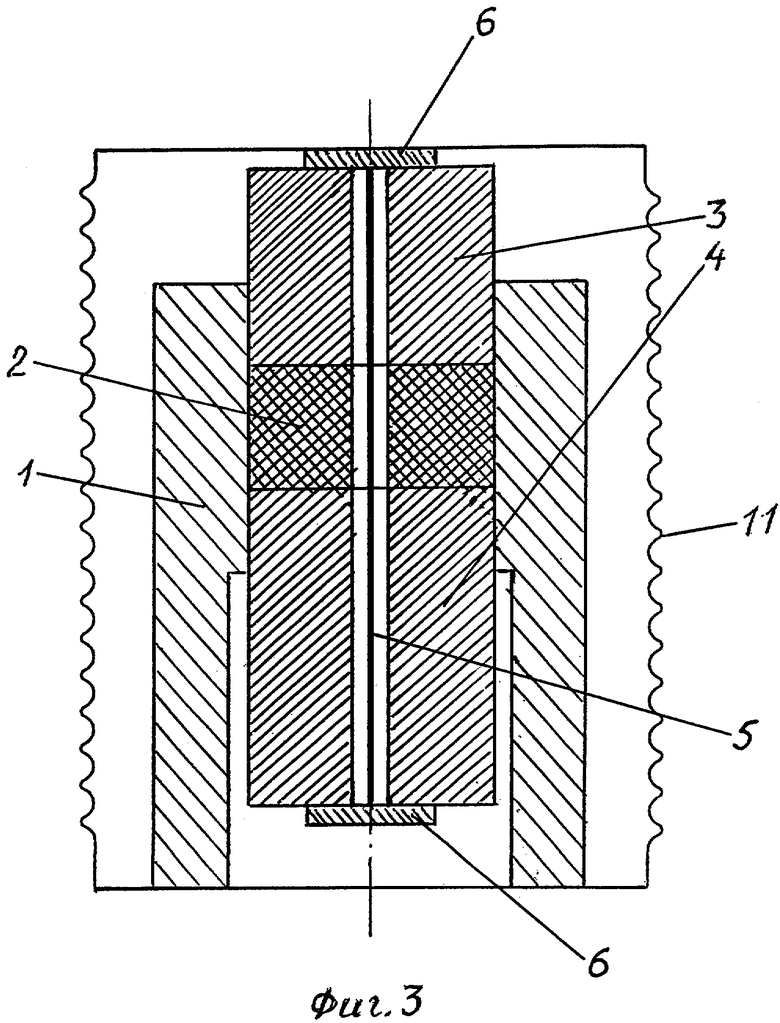
На фиг.1, 2, 3 изображено устройство в разрезе, отличающееся выполнением элемента механической связи между электродами.
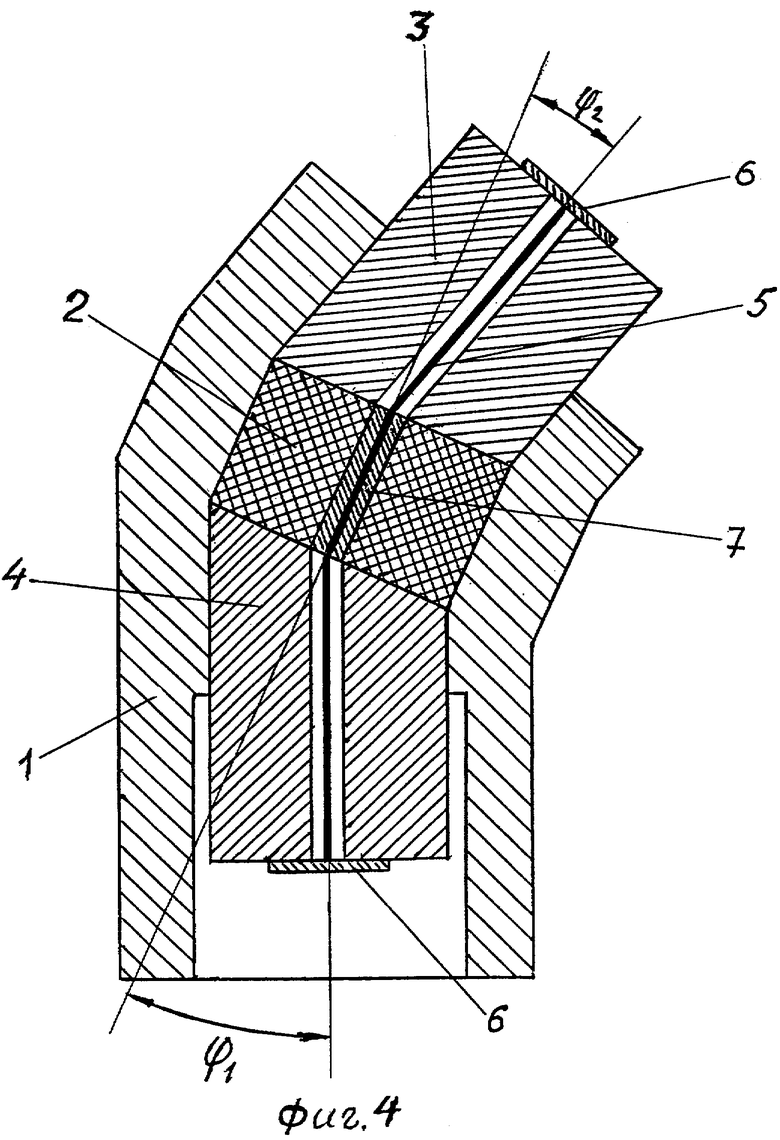
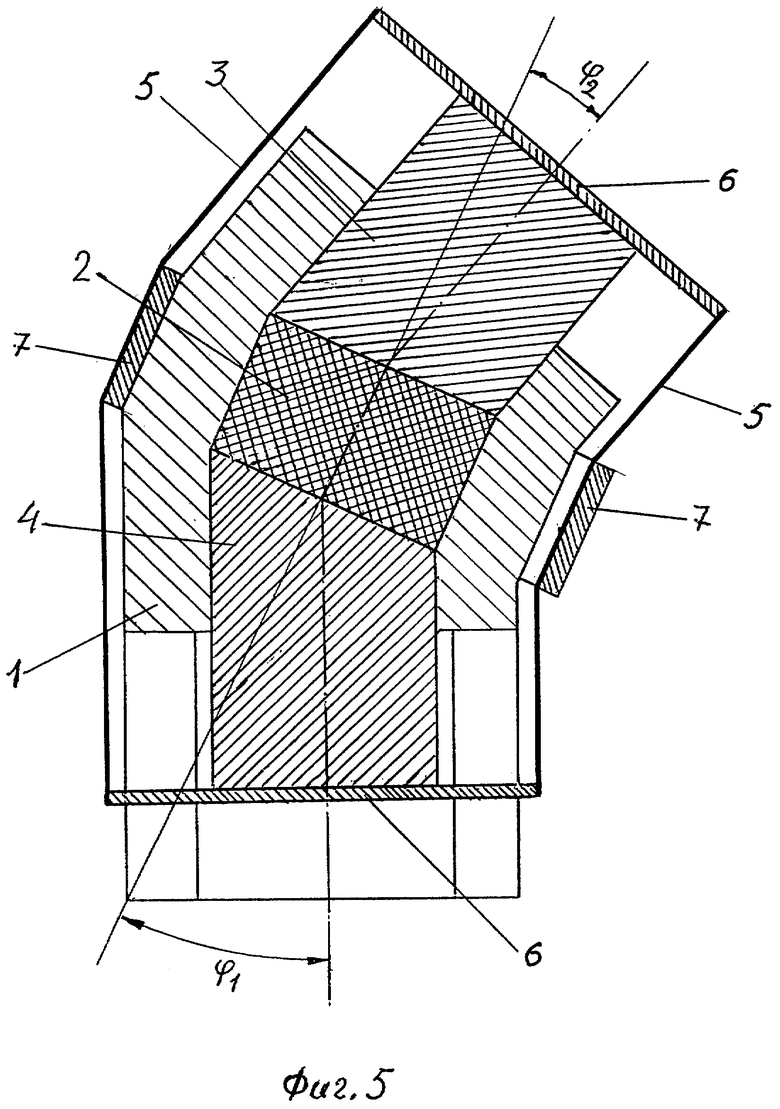
На фиг.4, 5 изображено в разрезе устройство, обеспечивающее неколлинеарное перемещение, отличающееся выполнением элемента механической связи между электродами.
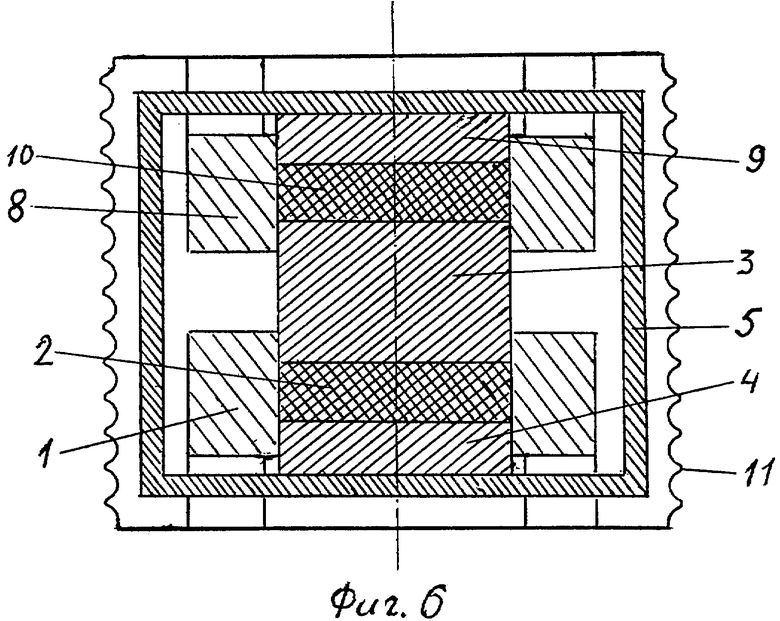
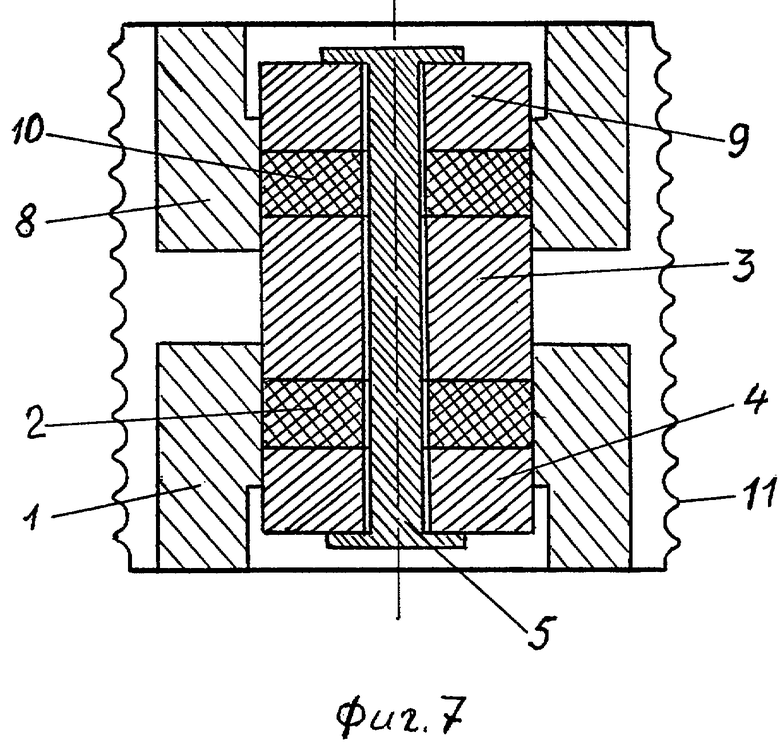
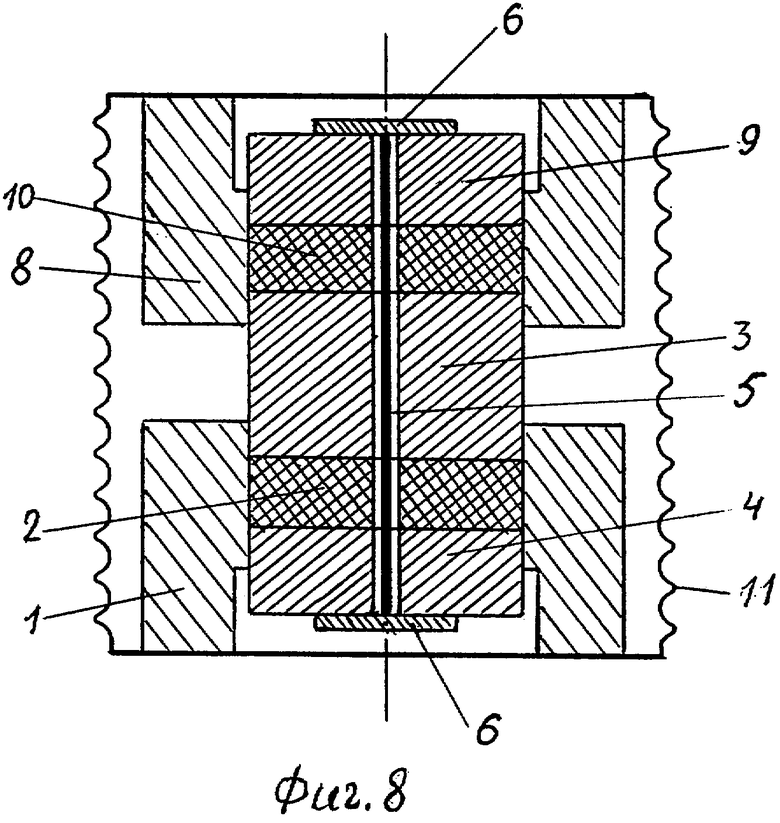
На фиг.6, 7, 8 изображено в разрезе устройство, обеспечивающее удвоение скорости и диапазона перемещения и увеличенную жесткость в поперечном направлении, отличающееся выполнением элемента механической связи между электродами.
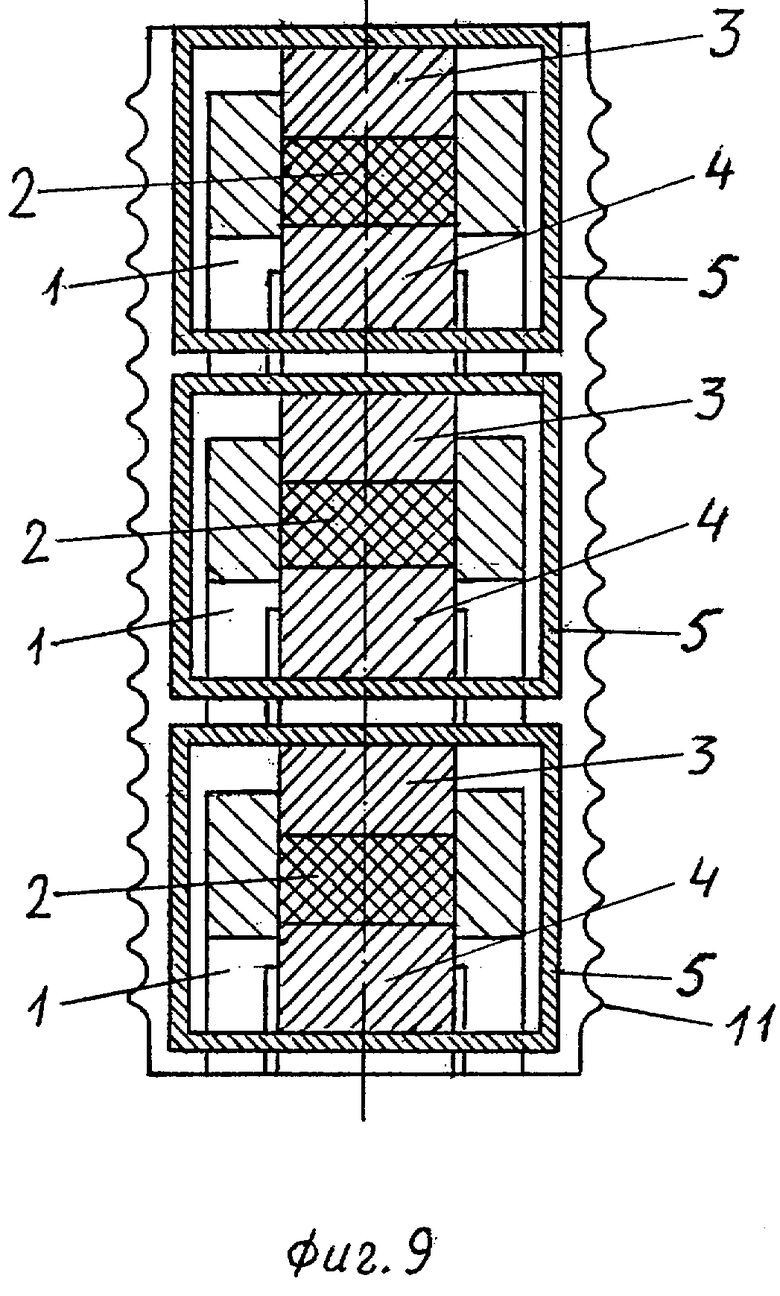
На фиг.9 изображено в разрезе устройство, представляющее собой последовательный пакет устройств, показанных на фиг.1.
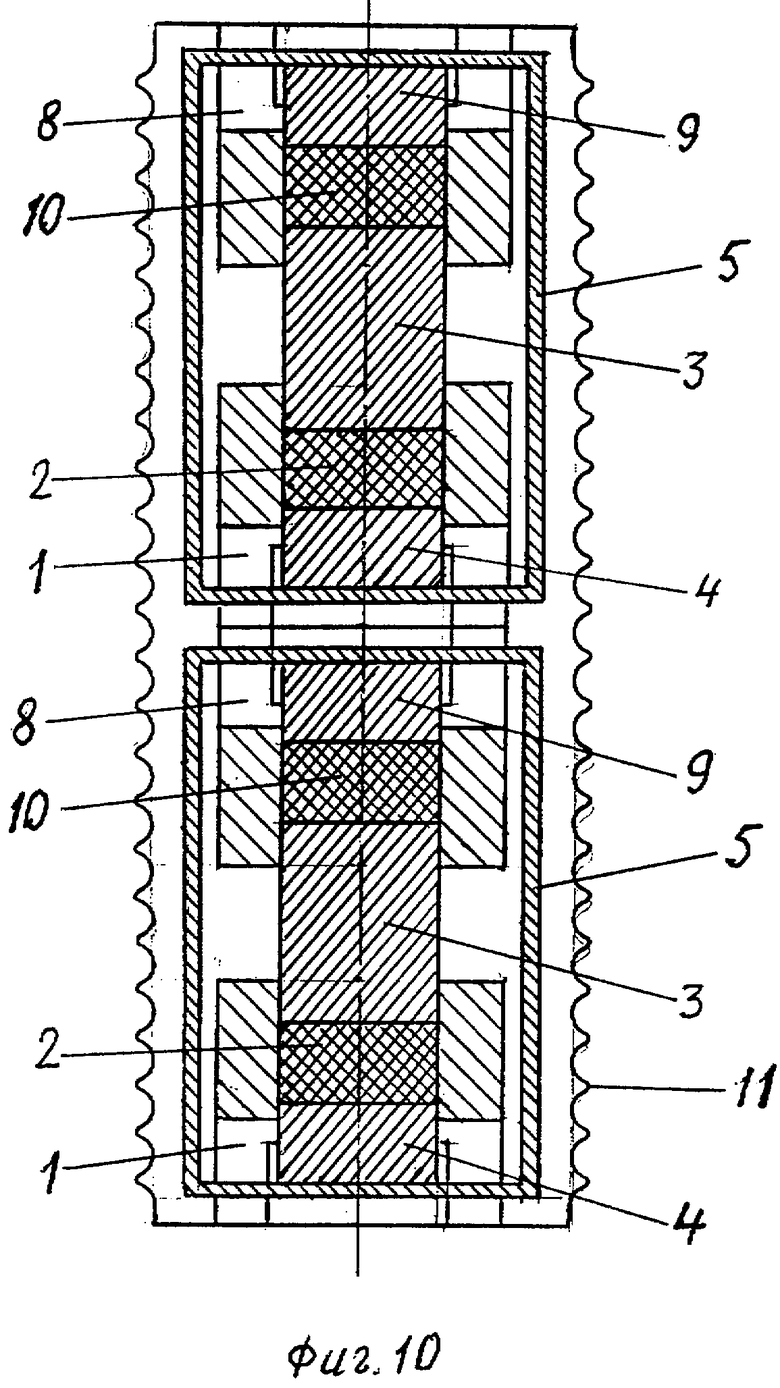
На фиг.10 изображено в разрезе устройство, представляющее собой последовательный пакет устройств, показанных на фиг.6
Вариант 1. Устройство содержит опорный корпус 1, в сквозной полости которого зафиксирован элемент ТЭЛ 2 электролитической ячейки, к которому с торцов плотно примыкают соосные электроды разных знаков (катод и анод) 3 и 4. Электроды изготовлены из одного и того же металла, по ионам которого ТЭЛ является проводником. Часть полости корпуса 1, примыкающая к электродам, служит направляющей для их перемещения, имеет одинаковую с ними форму поперечного сечения. Ее длина делается меньшей длины всей полости для уменьшения трения и сопротивления движению электродов. Площади поперечного сечения электродов 3, 4 либо меньше, либо равны площади поперечного сечения элемента ТЭЛ. Формы их поперечного сечения либо вписаны, либо вложены в форму поперечного сечения элемента ТЭЛ. Электроды для обеспечения постоянного электрического контакта их с ТЭЛ связаны между собой предварительно напряженной механической связью 5. Связь осуществляется различными упругими элементами, электрически изолированными от электродов и ТЭЛ, такими, как рамка 5 на фиг.1, охватывающая торцы электродов снаружи, а также стержень 5 на фиг.2, лента или струна 5 на фиг.3, проходящие сквозь продольные отверстия, выполненные в электродах и ТЭЛ. Лента и струна прикрепляются к наружным торцам электродов 3, 4 креплениями 6. Элементов связи может быть несколько в тех случаях, когда требуется более равномерно распределить нагрузку поджима по сечению ТЭЛ и уменьшить нагрузку на каждый из них с целью уменьшения усталостных явлений в материале связи и увеличения рабочего ресурса устройства. В тех случаях, когда затруднительно сделать отверстия в электродах и ТЭЛ, например, требуется микроминиатюрное устройство перемещений, поджим электродов обеспечивается рамкой, для которой в корпусе 1 проделаны специальные прорези (на фиг.1 это незаштрихованная часть корпуса 1). Прорези выполнены так, что ограничивают уменьшение электрода 4 в процессе перемещения с тем, чтобы оставалась затравочная часть, благодаря которой облегчается начало обратного перемещения из крайнего положения. Предусматривается также не показанная на чертежах внешняя электронная блокировка, которая отключает внешний источник тока при достижении подвижной частью любого из крайних положений так, что последующее включение возможно только при смене полюсов внешнего источника. Для предотвращения проворачивания электродов вокруг оси форма их поперечного сечения делается отличной от круга. Для обеспечения винтового перемещения электродов они вместе с направляющей составляют винтовые пары. В этом случае поджим электродов осуществляется элементом 5, проходящим через центральное продольное отверстие в электродах и ТЭЛ. Торцевые поверхности элемента ТЭЛ плоскопараллельны. Этим обеспечивается равномерное по поперечному сечению удлинение катода и возможность его перемещения без перекосов.
Устройство для неколлинеарных перемещений содержит опорный корпус 1, выполненный со сквозной полостью, имеющей два излома с электролитической ячейкой внутри. В средней части полости закреплен элемент ТЭЛ 2 с плоскопараллельными торцами. Поверхности электродов, контактирующие с торцами ТЭЛ, скошены таким образом, чтобы на контактах не было зазоров. Ось электрода 3 составляет угол φ2 с осью элемента ТЭЛ, а ось электрода 4 составляет с ней угол φ1. Соответственно расположены направляющие части корпуса 1. При условии, что оси электродов и элемента ТЭЛ лежат в одной плоскости, угол между осями электродов φ=φ1+φ2. Поджим электродов к ТЭЛ обеспечивается гибким, электрически изолированным от электродов элементом механической связи 5 (лента или струна), проходящим через сквозные отверстия в электродах и ТЭЛ, как на фиг.4, либо гибкими элементами 5, проходящими снаружи корпуса 1, как на фиг.5. Оно также содержит направляющие элементы 7, благодаря которым меняется направление ленты или струны 5, 6 - крепления элементов связи 5 к торцам электродов 3, 4. Площади поверхностей электродов 3, 4, примыкающие к ТЭЛ, либо меньше, либо равны площади поперечного сечения элемента ТЭЛ. Формы границ этих поверхностей либо вписаны, либо вложены в форму поперечного сечения элемента ТЭЛ.
Вариант 2. Устройство, обеспечивающее удвоение скорости и диапазона перемещений, а также увеличенную жесткость в поперечном направлении состоит из двух электролитических ячеек. Оно содержит опорный непроводящий корпус 1, в котором зафиксирован элемент ТЭЛ 2 первой ячейки. Устройство содержит также второй корпус 8 с зафиксированным в нем вторым элементом ТЭЛ 10 второй ячейки и три соосных электрода 3, 4 и 9, разделенных элементами ТЭЛ 2 и 10. Электрод 3 механически соединяет корпуса 1 и 8 и одним торцом плотно пристыкован к торцу элемента ТЭЛ 2, а вторым - к торцу элемента ТЭЛ 10. Площади поперечного сечения электродов 3, 4, 9 либо меньше, либо равны площадям поперечного сечения элементов ТЭЛ. Формы их поперечного сечения либо вписаны, либо вложены в форму поперечного сечения элементов ТЭЛ.
Подвижную часть устройства составляют электроды, корпус 8 и элемент ТЭЛ 10. Торцевые поверхности элементов ТЭЛ 2 и 10 плоскопараллельны. Поджим электродов к элементам ТЭЛ обеспечивается механической связью 5, как внешним образом - рамкой 5 на фиг.6, так и внутренним - стержнем 5 на фиг.7, лентой или струной 5 на фиг.8, проходящими через продольные отверстия, выполненные в электродах и элементах ТЭЛ. Лента и струна прикрепляются. к торцам электродов 4 и 5 креплениями 6. Для предотвращения проворачивания подвижной части вокруг оси форма поперечного сечения электродов 3, 4, 9, как и полостей корпусов 1 и 8, делается отличной от круга. Для обеспечения винтового перемещения подвижной части электрод 3 вместе с направляющими корпусов 1 и 8 образует винтовые пары. В этом случае поджим электродов осуществляется элементом 5, проходящим через центральное продольное отверстие в электродах и ТЭЛ.
Устройство, собранное в последовательный пакет из нескольких одинаковых устройств по варианту 1 так, что свободный торец электрода первого механически жестко соединен с корпусом второго и т.д. Такая сборка из трех устройств показана на фиг.9, где использованы обозначения: три корпуса 1 с элементами ТЭЛ - 2, электроды 3, 4, непроводящие элементы механической связи между электродами 3 и 4 выполнены в виде рамок 5. Возможна сборка устройств в пакет в произвольном порядке. Во избежание возможного перенапряжения на одном из элементов во внешнюю цепь устройства, входящие в состав сборки, включаются параллельно так, что электроды 3 подключаются к одному полюсу источника тока, а электроды 4 и 5 - к другому.
Устройство, собранное в последовательный пакет из несколько устройств по варианту 2 так, что механически жестко соединяются торец корпуса 8 одного устройства и торец корпуса 1 второго. Такая сборка из двух устройств показана на фиг.10, где связь, обеспечивающая поджим электродов 3 и 4 к элементу ТЭЛ 2, а электродов 3 и 9 - к элементу ТЭЛ 10, выполнена в виде рамки 5. Во избежание возможного перенапряжения на одном из элементов во внешнюю цепь устройства, входящие в состав сборки, включаются параллельно так, что электроды 3 подключаются к одному полюсу источника тока, а электроды 4, 9 - к другому.
Любое из описанных выше устройств при необходимости (работа в агрессивной среде, потребность термоизоляции) помещается в эластичную герметизирующую оболочку или сильфон 11. Перемещаемый объект прикрепляется либо к свободному торцу электрода 3 или 4 в случае устройства по варианту 1, либо к перемещаемому корпусу 8 в случае устройства по варианту 2. При наличии оболочки 11 он прикрепляется вне ее.
Устройство по варианту 1 работает следующим образом. При подключении к его электродам источника постоянного тока (на чертежах не показан) ионы уходят от анода 4 в электролит 2, проходят через него, приобретают на катоде 3 недостающие электроны и осаждаются в виде слоя на поверхности его торца. За счет этого уменьшается длина анода 4 и возрастает длина катода 3. Образующийся в процессе электролитического осаждения слой в точности воспроизводит форму поверхности катода, на которой он осаждается. Форма его поперечного сечения воспроизводит форму поперечного сечения катода 3. Благодаря тому, что торцы элемента ТЭЛ плоскопараллельны, осаждающийся слой нарастает равномерно по сечению. Если направляющая корпуса 1 и катод 3 образуют винтовую пару, то последний совершает винтовое движение. Его свободный торец перемещается и перемещает связанный с ним объект. Механическая связь 5 между электродами обеспечивает постоянный поджим их к элементу ТЭЛ 2 и сохранение их электрического контакта с ним. В устройстве для неколлинеарных перемещений из-за скоса примыкающих к ТЭЛ 2 поверхностей электродов 3, 4, их направления перемещения различаются. Электрод 3 перемещается под углом φ2, а электрод 4 - под углом φ1 к оси ТЭЛ (фиг.4, 5). Из-за этого скоса устройство обеспечивает только поступательные перемещения. Если оси электродов параллельны, то они перемещаются по параллельным направлениям, величина смещения между которыми равна Lsinφ1, где L - толщина элемента ТЭЛ.
Устройство по варианту 2 работает следующим образом. При подключении к источнику тока электрода 3, фиг.6-8, как катода, а электродов 4 и 9 как анодов ионы уходят с анодов, 4 и 9, в элементы ТЭЛ 2 и 10 соответственно и осаждаются в виде слоев на двух торцевых поверхностях катода 3. Образующиеся в процессе электролитического осаждения слои в точности воспроизводят форму торцевых поверхностей катода 3, на которых они осаждаются. Форма их поперечного сечения воспроизводит форму поперечного сечения катода 3. Благодаря тому, что торцы элементов ТЭЛ плоскопараллельны, осаждающиеся слои нарастают равномерно по сечению. При этом длины анодов 4 и 9 уменьшаются. Соответственно возрастает длина катода 3, возрастает также расстояние между корпусами 1 и 8 и общая длина устройства. Если катод 3 с направляющими корпусов 1 и 8 образует винтовые пары, то катод 3 совершает винтовое движение относительно корпуса 1, а корпус 8 совершает винтовое движение относительно катода 3. Соответственно этому перемещается связанный с корпусом 8 объект перемещения.
Каждое из одинаковых устройств по варианту 1 с соосными электродами, собранных в последовательный пакет, как на фиг.9, работает так же, как отдельно взятое устройство. При этом если во внешнюю цепь они включены параллельно так, что электроды 3 подключаются к одному полюсу источника тока, а электроды 4 - к другому, то результаты работы сборки есть сумма результатов работы отдельных устройств. Максимальная скорость перемещения, которую обеспечивает такое составное устройство, равна V=Nν, где N - число корпусов, содержащих элементы ТЭЛ, в сборке, ν - скорость перемещения, которую обеспечивает одно устройство по варианту 1. Общий диапазон поступательных перемещений суммируется из диапазонов перемещений отдельных устройств. Общий угол поворота в случае винтовых перемещений есть сумма углов поворота отдельных устройств.
Каждое из одинаковых устройств по варианту 2, собранных в последовательный пакет, как на фиг.10, работает так же, как отдельно взятое устройство. При этом если во внешнюю цепь они включены параллельно так, что электроды 3 подключаются к одному полюсу источника тока, а электроды 4 и 9 - к другому, то результаты работы сборки есть сумма результатов работы отдельных устройств. Максимальная скорость перемещения, которую обеспечивает такое составное устройство, равна V=Nν, где N - число корпусов, содержащих элементы ТЭЦ, в сборке, ν - скорость перемещения, которую обеспечивает одно устройство по варианту 1. Так же складывается общий диапазон поступательных перемещений и общий угол поворота в случае винтовых перемещений.
Устройство во всех вариантах совершает перемещение непрерывно и равномерно, пока по нему протекает постоянный ток, и до полного расходования материала анода. Оно является реверсивным. Реверсирование достигается переключением полюсов внешнего источника тока. Из-за малой подвижности ионов в ТЭЛ и малой их массы устройство является практически безинерционным. Для точного позиционирования достаточно его обесточить в точно отмеченный момент времени, после чего положение подвижной части устройства остается зафиксированным вплоть до последующего включения тока. Фиксация подвижной части в заданном положении не требует каких-либо тормозных приспособлений. Ее устойчивость обеспечена прочностью элементов устройства.
Рассмотрим работу устройства более подробно. Скорость нарастания массы слоя на катоде определяется первым законом электролиза Фарадея:
где F - постоянная Фарадея, А - атомная масса иона, n - кратность его заряда, J - ток, протекающий через ячейку. С помощью закона Ома для участка цепи, включающего элемент ТЭЛ и два резистора, соответствующих двум контактам электролита с электродами (сопротивлением электродов пренебрегаем из-за высокой электронной проводимости их материала), соотношение (1) приводится к виду:
где U - напряжение, приложенное к электродам устройства, S - площадь поперечного сечения элемента ТЭЛ, которая для простоты предполагается равной площади поперечного сечения катода, R - сопротивления на контакте электрода с электролитом. Из (2) следует выражение для скорости нарастания толщины слоя h и, соответственно, длины катода или скорости перемещения ν:

где ρ - плотность материала электродов. Скорость перемещения внешнего торца электрода 4 устройства для неколлинеарных перемещений фиг.4, 5 определяется соотношением ν4=νcosφ1, а внешнего торца электрода 3 - соотношением ν3=νcosφ2.
Есть ряд ТЭЛ, ионная проводимость которых на 5-6 порядков выше электронной. Это, например, соединения α-AgI, RbAg4I5, которые являются проводниками по ионам Ag+ и характеризуются высокими; значениями ионной проводимости σ(Ом-1см-1) при комнатной температуре [4]. У первого σ=3,37 (при 125°C), у второго σ=0,28 (при комнатной температуре). Соединение Cu4RbCl3I2 является проводником по ионам Cu+. Его проводимость при комнатной температуре σ=0,47. В качестве примера рассмотрим устройство по варианту 1, в котором электроды серебряные, а элемент ТЭЛ представляет собой таблетку из RbAg4I5, радиус основания которой r=0,1 см. Ее толщина L=0,1 см. Атомная масса серебра А=107,9, его плотность ρ=10,5 г/см3, σ=0,28, сопротивление на контакте R=0,27 Ом [4]. Напряжение внешнего источника принимаем U=0,5 В. Это меньше потенциала разложения электролита, равного согласно [5] 0,6B. Подставляя эти величины в (2), находим скорость нарастания массы на катоде m=4,6910-5 г/с.
Пользуясь (3) для скорости приращения длины катода и, соответственно, скорости перемещения, получаем величину ν=1,42·10-4 см/с. Это сопоставимо со скоростью перемещений известных устройств [6].
Из (3) видно, что при условии L>2RσS, скорость перемещения слабо зависит от площади поперечного сечения ячейки. Она не зависит от формы этого сечения и от длины используемых электродов, если она не слишком велика. Это указывает на возможность масштабирования такого устройства. Данное устройство может осуществить как микро- , так и макроперемещения. Величина возможного перемещения определяется длиной используемых электродов и затратами времени. Это указывает на возможность применения предлагаемого устройства к решению различных технических задач.
Таким образом, предложены варианты устройства для прецизионных перемещений, которое обладает следующими преимуществами по сравнению с существующими. Оно совершает перемещения не дискретно, а непрерывно и равномерно, без рывков и вибраций; работает от источника постоянного тока низкого напряжения, поэтому не является источником электромагнитных и механических вибрационных помех и электробезопасно. Устройство обеспечивает устойчивую долговременную фиксацию подвижной части в заданном положении и при этом является реверсивным. Оно пригодно для осуществления цифрового программного управления его работой, поскольку линейным управляющим параметром является прикладываемое к нему напряжение. Устройство просто по конструкции, технологично в изготовлении, его высокий рабочий ресурс обусловлен долговременной стабильностью параметров применяемого твердого электролита.
Используемая литература
1. Миронов В. Основы сканирующей зондовой микроскопии / В.Миронов. М.: Техносфера, 2004. - 144 с.
2. Пьезоэлектрическая керамика: принципы и применение. - Мн.: ООО «ФУАинформ», 2003, с.54-73.
3. Прецизионный пьезоэлектрический шаговый механизм перемещений: пат. 2291551 РФ, МПК Н02Н 2/02, H01L 41/09 / В.Г.Бондаренко; заявл. 22.02.05; опубл. 10.08.07 // Официальный бюллетень «Изобретения. Полезные модели». - 2007. - №1.
4. Букун Н.Г. Электролиты твердые / Н.Г.Букун // Химическая энциклопедия [Электронный ресурс]. - 2006. - Режим доступа: http://www.xumuk.ru/encyklopedia/2/5308.html. - Дата доступа: 17.09.2008.
5. Owens В.В. High Conductivity Solid Electrolyte System RbI - AgI. / B.B.Owens, G.R.Argue. // J. Electrochem. Soc. - 1970. - V.117, №7. - pp.898-900.
6. Волков Ю.П. Микропозиционер с магнитной фиксацией опор / Ю.П.Волков, В.А.Панаев, Ю.Ф.Федотов // ПТЭ. - 1989, №2. - с.207-208.
Изобретение относится к машиностроению и может найти применение при создании устройств перемещения в системах автоматической юстировки оптических приборов, в прецизионном приборостроении, в нанотехнологии, в системах подачи расходного материала в лазерных реактивных двигателях и т.д. Устройство состоит из электролитической ячейки и опорного корпуса, в сквозной полости которого она расположена; ячейка содержит элемент из твердого электролита (ТЭЛ), зафиксированный в корпусе, и электроды, соединенные между собой предварительно напряженной непроводящей механической связью, обеспечивающей поджим их к ТЭЛ. Электроды торцами примыкают к противоположным сторонам ТЭЛ, а боковыми сторонами - к стенкам корпуса, служащими направляющими для их перемещения, и составляют подвижную часть устройства, перемещение которой осуществляется за счет электролитического осаждения материала анода на катоде. Изобретение обеспечивает упрощение конструкции, технологичность, рабочий ресурс обеспечен стабильностью параметров твердого электролита; устройство совершает перемещения непрерывно и равномерно, работает от источника постоянного тока низкого напряжения и обеспечивает устойчивую долговременную фиксацию подвижной части в заданном положении и при этом является реверсивным. 2 н. и 9 з.п. ф-лы, 10 ил.
1. Устройство для прецизионных перемещений, состоящее из электролитической ячейки, расположенной в сквозной полости опорного корпуса, содержит элемент твердого электролита (ТЭЛ), зафиксированный в корпусе, и два электрода, соединенных между собой предварительно напряженной непроводящей механической связью, примыкающих торцами к противоположным сторонам элемента ТЭЛ, а боковыми сторонами - к стенкам полости корпуса, выполненного так, что эти стенки служат направляющими для перемещения электродов.
2. Устройство по п.1, отличающееся тем, что оно собрано в пакет так, что свободный торец электрода предыдущего пакета жестко соединен с корпусом последующего пакета.
3. Устройство по п.1, отличающееся тем, что примыкающие к элементу ТЭЛ торцевые поверхности электродов скошены таким образом, что оси электродов не совпадают по направлению с осью элемента твердого электролита.
4. Устройство по п.1, отличающееся тем, что механическая связь между электродами выполнена в виде рамки, охватывающей торцы электродов снаружи, или в виде стержня, ленты, струны, жестко закрепленных на наружных торцах электродов и установленных в продольных отверстиях, выполненных в электродах и ТЭЛ.
5. Устройство по п.1, отличающееся тем, что электроды и направляющие корпусов имеют форму, отличную от цилиндра.
6. Устройство по п.2, отличающееся тем, что имеет общую эластичную герметизирующую оболочку.
7. Устройство для прецизионных перемещений, состоящее из двух механически соединенных электролитических ячеек, каждая из которых расположена в отдельном корпусе, содержит элемент ТЭЛ и два примыкающих торцами к противоположным сторонам элемента ТЭЛ электрода, одним из которых, общим для двух ячеек, механически соединены их корпуса, электроды связаны между собой предварительно напряженной общей механической непроводящей связью.
8. Устройство по п.7, отличающееся тем, что оно собрано в пакет так, что жестко соединены торцы корпусов.
9. Устройство по п.7, отличающееся тем, что механическая связь между электродами выполнена в виде рамки, охватывающей торцы электродов снаружи, или в виде стержня, ленты, струны, жестко закрепленных на наружных торцах электродов и установленных в продольных отверстиях, выполненных в электродах и ТЭЛ.
10. Устройство по п.7, отличающееся тем, что электроды и направляющие корпусов имеют форму, отличную от цилиндра.
11. Устройство по п.8, отличающееся тем, что имеет общую эластичную герметизирующую оболочку.
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2291551C2 |
| УСТРОЙСТВО ДЛЯ ПРЕЦИЗИОННЫХ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2284464C2 |
| Вальцы для обработки пластических масс | 1949 |
|
SU78368A1 |
| Приспособление для очистки дымовых газов | 1934 |
|
SU43111A1 |
| Способ очистки растительных масел | 1934 |
|
SU43105A1 |

