Изобретение относится к области электрических двигателей, а более точно прецизионных пьезоэлектрических шаговых механизмов перемещения. Изобретение может быть использовано в качестве исполнительного механизма в прецизионных устройствах механической обработки материалов, а также устройствах телемеханики, автоматики, электроники, оптики, медицине, биологии.
Известен целый ряд шаговых электрических двигателей, использующих пьезоэлементы в качестве исполнительного устройства, перемещающего и фиксирующего блоков, например, по А.С. СССР №720576, МКИ H 01 L 41/04, опубл. 1980.03.01. Принцип действия шаговых двигателей, имеющих два фиксирующих блока и перемещающий блок между ними, можно образно иллюстрировать подъемом человека по канату или перемещением гусеницы.
Наиболее близким к предлагаемому изобретению, выбранным в качестве прототипа, является пьезоэлектрический шаговый двигатель, защищенный патентом РФ №2167487, кл. H 02 N 2/00, H 01 L 41/09, опубл. 1998.09.27. Известный механизм перемещения содержит корпус с закрепленными в нем фиксирующими узлами и подвижную часть. Фиксирующие узлы выполнены не менее чем из двух пьезоблоков, которые расположены внутри корпуса в продольной плоскости друг за другом или в поперечной плоскости.
Недостатком такого двигателя является существенная зависимость от качества поверхности, по которой скользят фиксирующие элементы, что связано с незначительными изменениями геометрических размеров пьезоэлементов при подаче на них напряжения и приводит к усложнению технологии изготовления. Работа пьезоэлементов в режиме растяжения снижает надежность работы.
Задача, решаемая предлагаемым изобретением, - создание прецизионного пьезоэлектрического шагового механизма перемещения, изготовление которого не представляло бы высоких требований к технологии изготовления и инструментальному парку.
Технический результат от использования изобретения заключается в упрощении технологии изготовления и повышении надежности работы.
Указанный результат достигается тем, что в прецизионном пьезоэлектрическом шаговом механизме перемещения, содержащем подвижную часть и основной корпус с расположенными в нем в продольной плоскости двумя фиксирующими блоками и сдвигающим пакетом пьезоэлементов между ними, фиксирующие блоки, состоящие из фрикционных элементов и раздвигающего пакета пьезоэлементов между ними, установлены в дополнительных корпусах, один из фиксирующих блоков выполнен подвижным в основном корпусе, между основным корпусом и подвижным фиксирующим блоком расположена пружина, при этом фрикционные элементы выполнены в виде рычагов, установленных на закрепленной в держателях оси с возможностью одновременного вращения навстречу друг другу, а торцовые поверхности основного и дополнительного корпусов установлены в боковых поверхностях основного и дополнительного корпусов с возможностью регулирования сжатия их внутренних узлов.
Далее изобретение поясняется описанием конкретного примера его выполнения и прилагаемыми чертежами.
На фиг.1 изображен сборочный чертеж прецизионного пьезоэлектрического шагового механизма перемещения, продольный разрез.
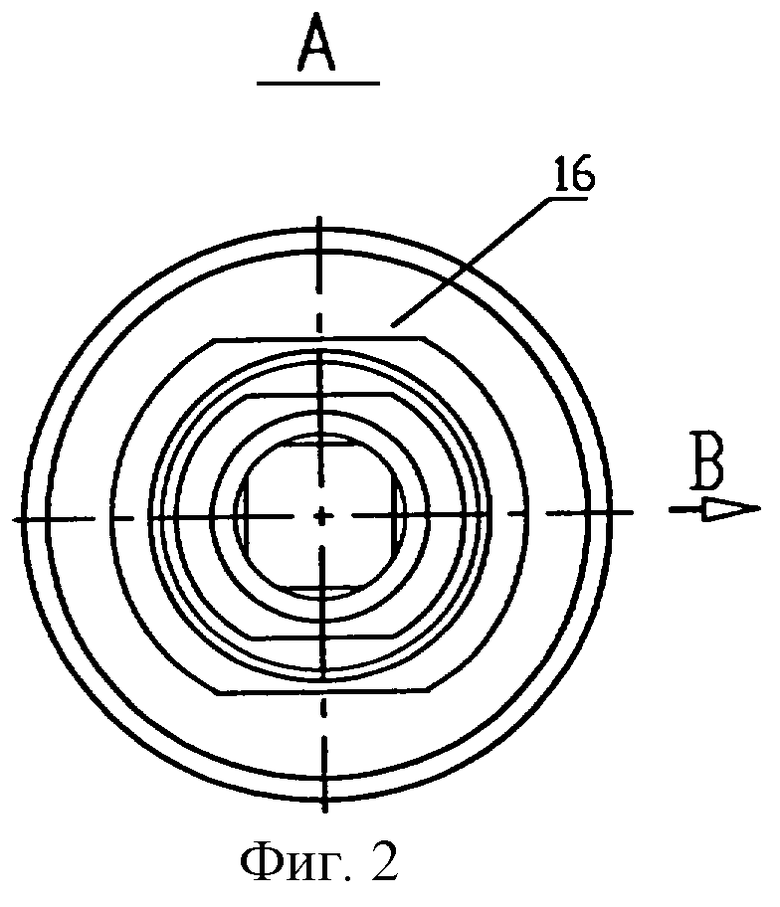
На фиг.2 - вид сборочного чертежа сбоку.
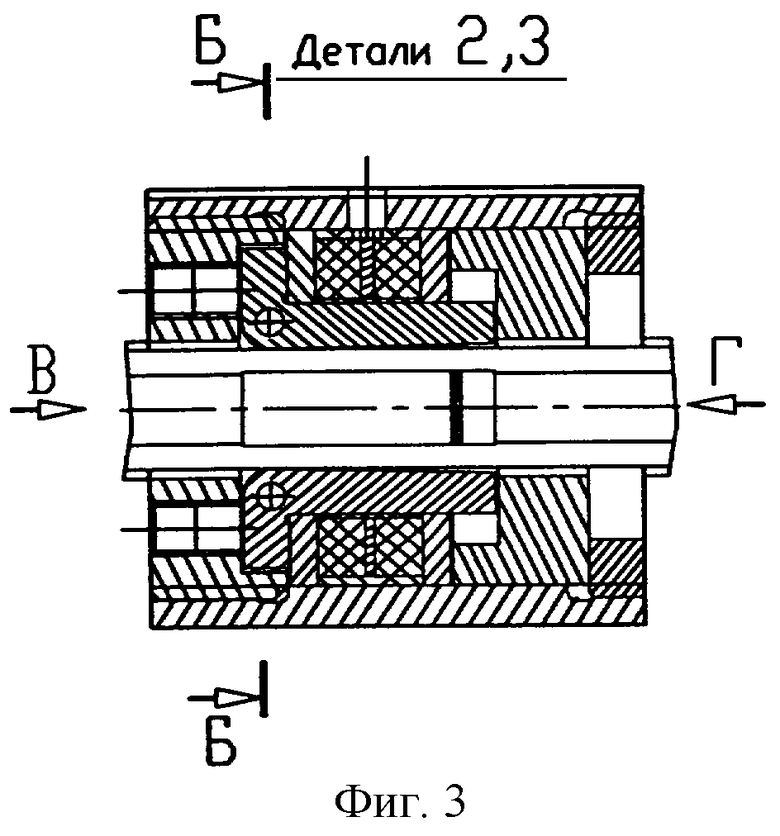
На фиг.3 - сборочный чертеж фиксирующего блока 2, 3.
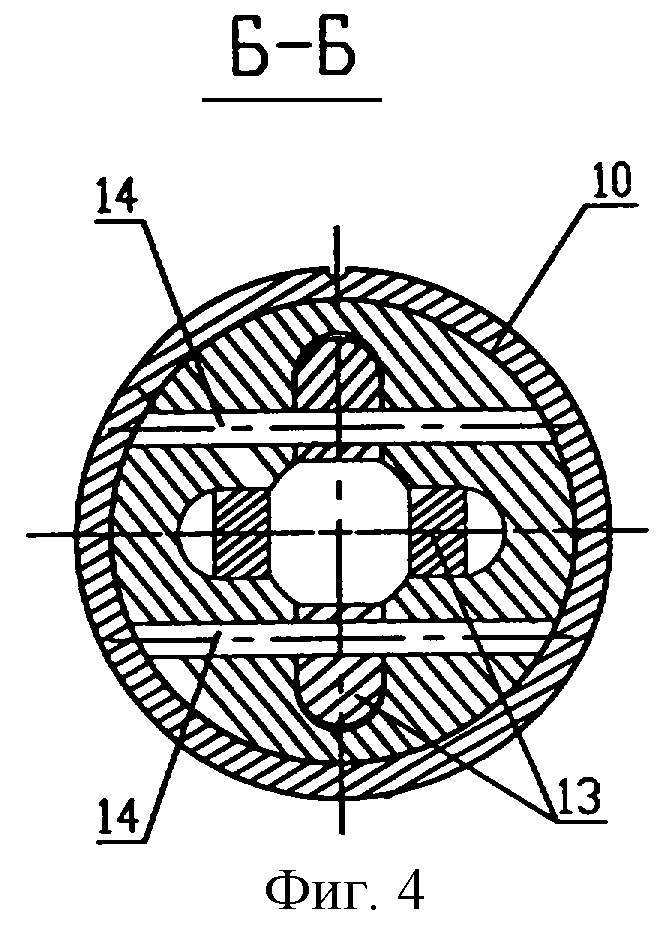
На фиг.4 - разрез фиксирующего блока 2, 3.
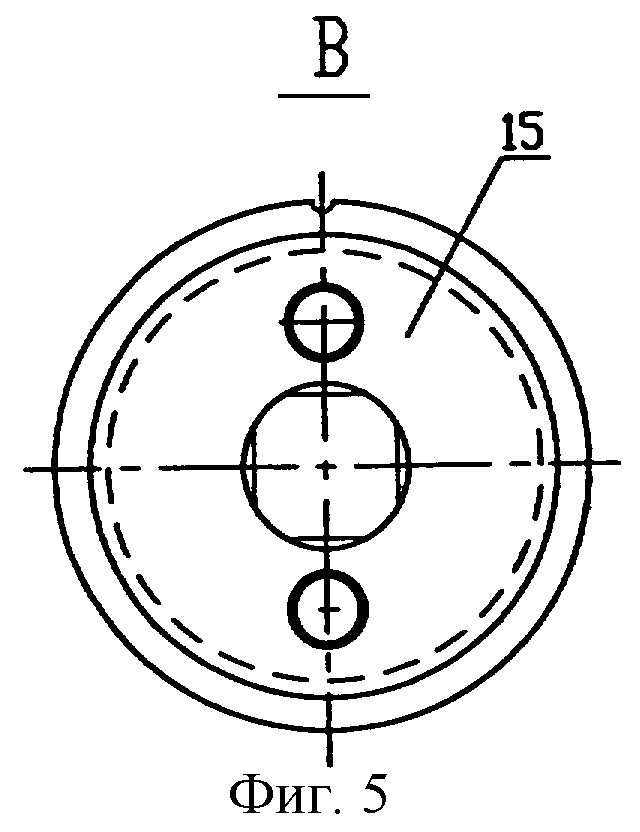
На фиг.5 - вид с левого торца фиксирующего блока 2, 3.
На фиг.6 - вид с правого торца фиксирующего блока 2, 3.
Он содержит основной корпус 1, в котором находятся два фиксирующих блока 2 и 3. Между фиксирующими блоками 2 и 3 зажат пакет сдвигающих пьезоэлементов 4. В центре основного корпуса 1 имеется отверстие, в котором расположена подвижная часть в виде направляющей 5. Фиксирующие блоки 2 и 3 состоят из фрикционных элементов 6 и раздвигающего пакета пьезоэлементов 7. Пакеты пьезоэлементов 7 и 4 отличаются размерами. Пакет сдвигающих пьезоэлементов 4 состоит из пьезоэлектрических колец 8, между которыми находятся металлические кольца 9. Фиксирующие блоки 2 и 3 установлены в дополнительном корпусе 10. Среднее металлическое кольцо 9 раздвигающего пакета пьезоэлементов 7 закреплено в дополнительном корпусе 10. Все металлические кольца 9 электрически между собой соединены (соединения не показаны) и соединены с нулевым потенциалом (землей). Между пьезоэлектрическими кольцами 8 находятся напыленные на них электроды 11, которые электрически изолированы от направляющей 5, основного корпуса 1, а в фиксирующих блоках 2, 3 - от дополнительного корпуса 10. Электроды 11 между собой электрически соединены (соединения не показаны) и подсоединены к контакту, потенциал которого может плавно нарастать. Фиксирующий блок 2 неподвижный и может быть закреплен в основном корпусе 1. Фиксирующий блок 3 в дополнительном корпусе 10 может перемещаться в основном корпусе 1 в одном направлении под действием пружины 12, расположенной между фиксирующим блоком 3 и основным корпусом 1, и под действием пакета сдвигающих пьезоэлементов 4 - в другом. Фрикционные элементы 6 фиксирующих блоков 2 и 3 выполнены в виде рычагов 13, вращающихся на осях 14, закрепленных в держателях 15. Держатели 15 могут перемещаться под действием ввинчивающихся торцовых поверхностей 16 при наладке, но в рабочем положении держатель 15 жестко закреплен в дополнительном корпусе 10. Четыре рычага 13 могут вращаться одновременно навстречу друг другу за счет раздвигающего пакета пьезоэлементов 7 или в обратную сторону за счет пружин 17, которые установлены между рычагами 13 и держателем 15.
Работает механизм перемещения следующим образом.
На пакет раздвигающих пьезоэлементов 7 фиксирующего блока 3 подается напряжение через металлические кольца 9 и электроды 11. В результате, на пьезоэлектрических кольцах 8 в продольном направлении появляется нарастающая поляризация и за счет обратного пьезоэффекта их толщина плавно увеличивается, рычаги 13 одновременно вращаются навстречу друг другу, фиксируя блок 3 на направляющей 5 (первый такт). На пакет сдвигающих пьезоэлементов 4 подается плавно нарастающее напряжение. В результате, на пьезоэлектрических кольцах 8 в продольном направлении появляется нарастающая поляризация и за счет обратного пьезоэффекта их толщина плавно увеличивается (второй такт). Фиксирующий блок 2 вместе с основным корпусом 1 перемещается влево, сжимая пружину 12. Далее на пакет раздвигающих пьезоэлементов 7 фиксирующего блока 2 подается напряжение. В результате, на пьезоэлектрических кольцах 8 в продольном направлении появляется нарастающая поляризация и за счет обратного пьезоэффекта их толщина плавно увеличивается, рычаги 13 одновременно вращаются навстречу друг другу, фиксируя блок 2 на направляющей 5 (третий такт). С фиксирующего блока 3 снимается напряжение, поляризация пьезоэлементов исчезает, размеры их уменьшаются и пружинами 17 рычаги 13, вращающиеся на оси 14, вращаются одновременно в обратном направлении, освобождая от фиксации фиксирующий блок 3 (четвертый такт).
Затем убирается напряжение с пакета сдвигающих пьезоэлементов 4 и толщина его уменьшается. Пружина 12 разжимается, перемещая влево фиксирующий блок 3 (пятый такт). С фиксирующего блока 2 снимается фиксирующее напряжение (шестой такт). Далее этапы повторяются, образуя новый цикл. В результате основной корпус 1 перемещается влево по направляющей 5. Если нарастающее напряжение подается при зажатом фиксирующем блоке 2 и отжатом фиксирующем блоке 3, а убирается при зажатом блоке 3 и отжатом блоке 2, то основной корпус 1 будет двигаться вправо. При перемещении основного корпуса 1 направляющая 5 закреплена во внешнем устройстве. Если во внешнем устройстве закреплен основной корпус 1, а направляющая 5 не закреплена, то двигаться будет соответственно направляющая 5, а не основной корпус, но соответственно в противоположном направлении, в котором бы двигался корпус 1. При наладке, вращая торцовые поверхности 16, сдвигающие держатель 15, добиваются такого перемещения фрикционных элементов 6 в дополнительном корпусе 10, чтобы при фиксации блоков 2 и 3 не происходило их смещения по направляющей 5.
Предлагаемый прецизионный пьезоэлектрический шаговый механизм перемещения изготавливают из следующих деталей. Размеры пьезоэлементов определяются мощностью и назначением механизма перемещения и выбираются из типоразмерных рядов, выпускаемых промышленностью. Все остальные элементы прецизионного пьезоэлектрического шагового механизма перемещения - корпуса, направляющая, рычаги, держатели, металлические кольца между пьезоэлементами - изготавливают из конструкционных материалов, имеющих одинаковый коэффициент теплового расширения. Пружины могут быть использованы стандартные, если они подходит по размеру, или изготавливают из пружинистой стали. Торцовые поверхности основного и дополнительного корпусов фиксируются в боковых поверхностях, например, на резьбе.
Предлагаемый прецизионный пьезоэлектрический шаговый механизм перемещения имеет следующие преимущества по сравнению с прототипом: упрощается технология изготовления за счет применения рычагов, позволяющих увеличить технологические зазоры между фрикционными элементами и направляющей; увеличивается надежность работы пьезоэлементов за счет сжатия внутренних узлов конструкции (в основном корпусе - фиксирующих блоков, сдвигающего пакета пьезоэлементов, пружины, в дополнительных корпусах - фрикционных элементов и раздвигающего пакета пьезоэлементов между ними). Кроме того, упрощается конструкция механизма за счет использования стандартных деталей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167486C2 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2161364C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2153219C2 |
| Линейный шаговый пьезоэлектрический двигатель | 2019 |
|
RU2727610C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОЭМИССИОННЫМ ТОКОМ ЛАМПЫ И АВТОЭМИССИОННАЯ ЛАМПА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2316844C1 |

Изобретение относится к области электрических двигателей и может быть использовано в качестве исполнительного механизма в прецизионных устройствах механической обработки материалов. Прецизионный пьезоэлектрический шаговый механизм перемещения состоит из подвижной части и основного корпуса с расположенными в нем в продольной плоскости двумя фиксирующими блоками и сдвигающим пакетом пьезоэлементов между ними. Фиксирующие блоки, состоящие из фрикционных элементов и раздвигающего пакета пьезоэлементов между ними, установлены в дополнительном корпусе; один из фиксирующих блоков выполнен подвижным в основном корпусе. Между основным корпусом и подвижным фиксирующим блоком расположена пружина. Фрикционные элементы выполнены в виде рычагов, установленных на закрепленной в держателях оси с возможностью одновременного вращения навстречу друг другу, а торцовые поверхности основного и дополнительного корпусов установлены в боковых поверхностях основного и дополнительного корпусов с возможностью регулирования сжатия их внутренних узлов. Технический результат от использования изобретения заключается в упрощении технологии изготовления и повышении надежности работы. 6 ил.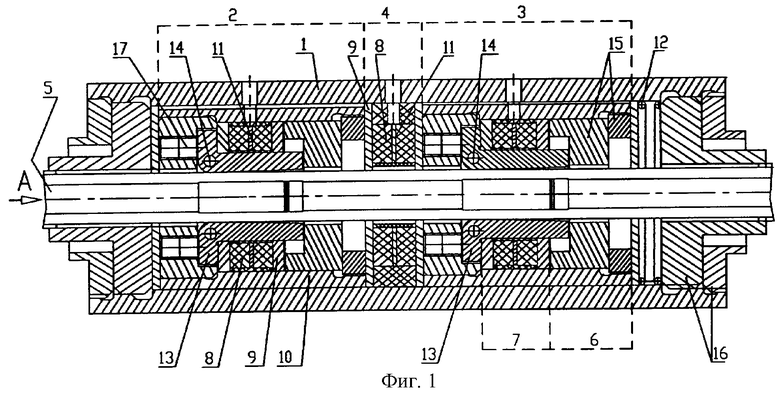
Прецизионный пьезоэлектрический шаговый механизм перемещения, содержащий подвижную часть и основной корпус с расположенными в нем в продольной плоскости двумя фиксирующими блоками и сдвигающим пакетом пьезоэлементов между ними, отличающийся тем, что фиксирующие блоки, состоящие из фрикционных элементов и раздвигающего пакета пьезоэлементов между ними, установлены в дополнительных корпусах, один из фиксирующих блоков выполнен подвижным в основном корпусе, между основным корпусом и подвижным фиксирующим блоком расположена пружина, при этом фрикционные элементы выполнены в виде рычагов, установленных на закрепленной в держателях оси с возможностью одновременного вращения навстречу друг другу, а торцовые поверхности основного и дополнительного корпусов установлены в боковых поверхностях основного и дополнительного корпусов с возможностью регулирования сжатия их внутренних узлов.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| Пьезоэлектрический линейный шаговый двигатель | 1977 |
|
SU720576A1 |
| Пьезоэлектрический двигатель | 1976 |
|
SU573828A1 |
| Шаговый двигатель | 1977 |
|
SU738016A1 |
| УСТРОЙСТВО для КЛАССИФИКАЦИИ ЗЕРНИСТЫХ МАТЕРИАЛОВ | 0 |
|
SU360975A1 |
| Резец с креплением режущей пластинки силами резания | 1957 |
|
SU112454A1 |

